Application of a New Combination Algorithm in ELF-EM Processing

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
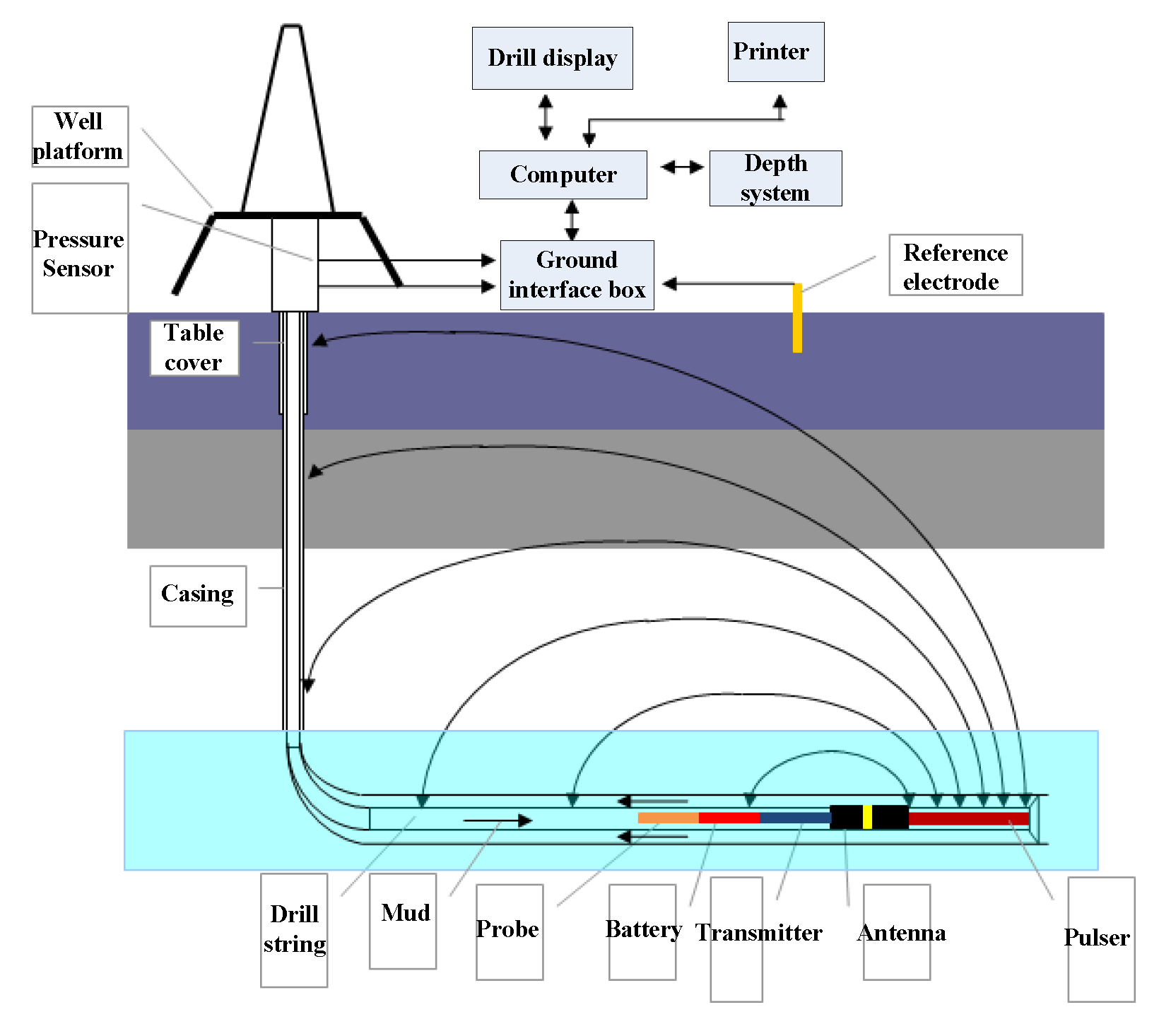
2. The Encoding and Influence Factors of ELF-EM Transmission in Strata
| Frame sync header | Mode word | Data1 | Data2 | …… | Data(2N-1) |
| S | F | x1 | x2 | …… | xn |
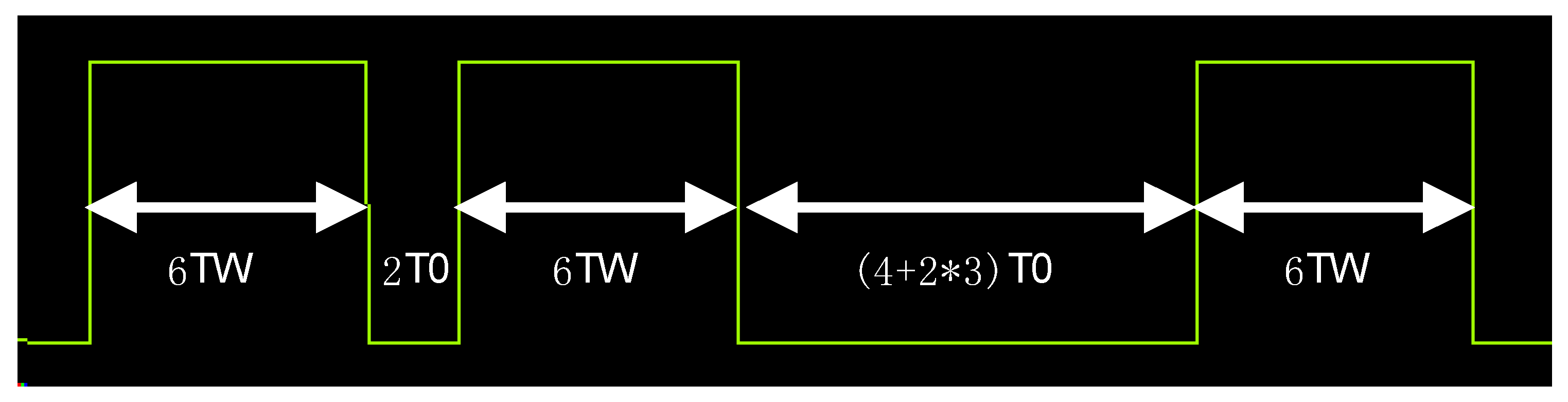
- Data stream: M = 6TW + 2T0 + 6TW + (4 + F × 3) T0 + 6TW + (4 + x1 × 3) T0 + 6 TW + ⋯ + (4 + xn × 3) T0 + 6TW.
- S: S = 6TW + 2T0 + 6TW (TW represents carrier cycle high level, T0 represents carrier cycle low level).
- F: Represents the type of measurement data. F = 0, 1, 2.
- X: Represents the decoding, whose format is X = 6TW + (4 + x × 3) T0 + 6TW, X = x1, x2, …, xn.
- T: The width of a code.
- S2 waveform envelope detection is shown in Figure 4.
3. Filtering Algorithm Analysis
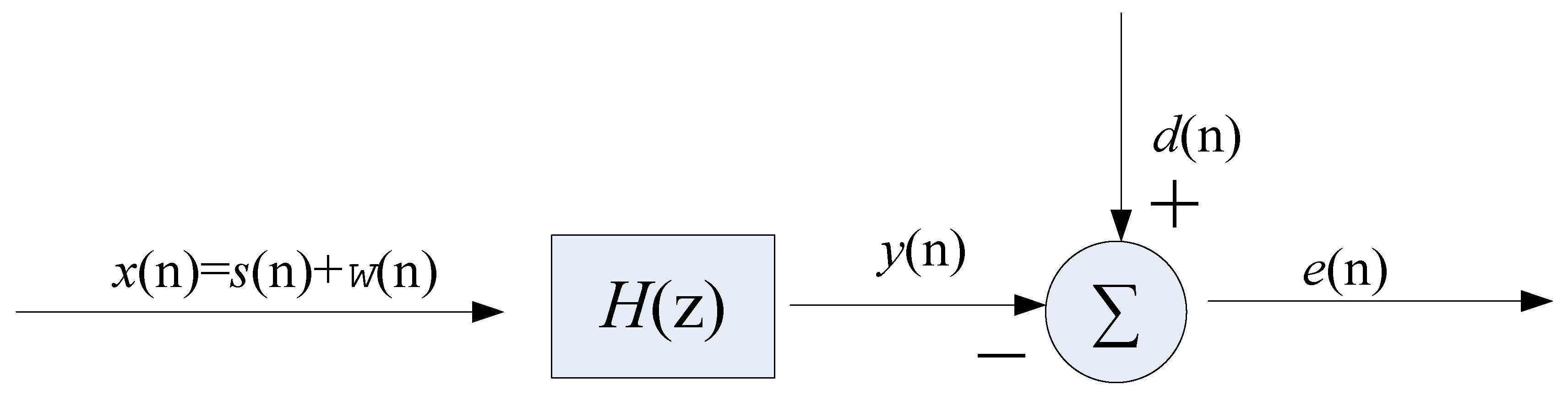
3.1. FIR Wiener Filtering Algorithm
- If , then filtering is wrong;
- If , then pure prediction is wrong;
- If , then prediction is wrong;
- If , then signal smoothing is wrong;
3.2. Adaptive Algorithm
3.3. Correlative Filtering Detection Algorithm
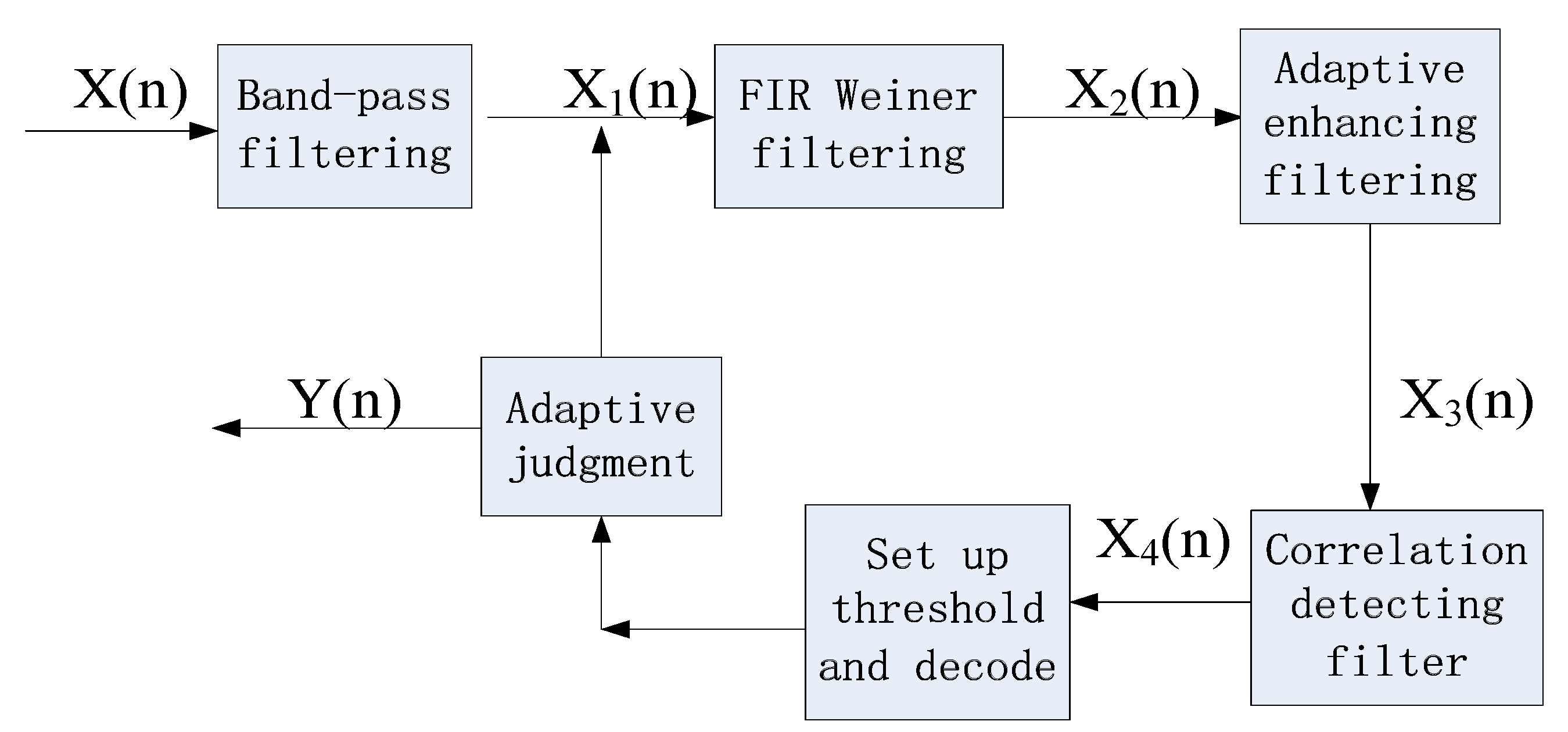
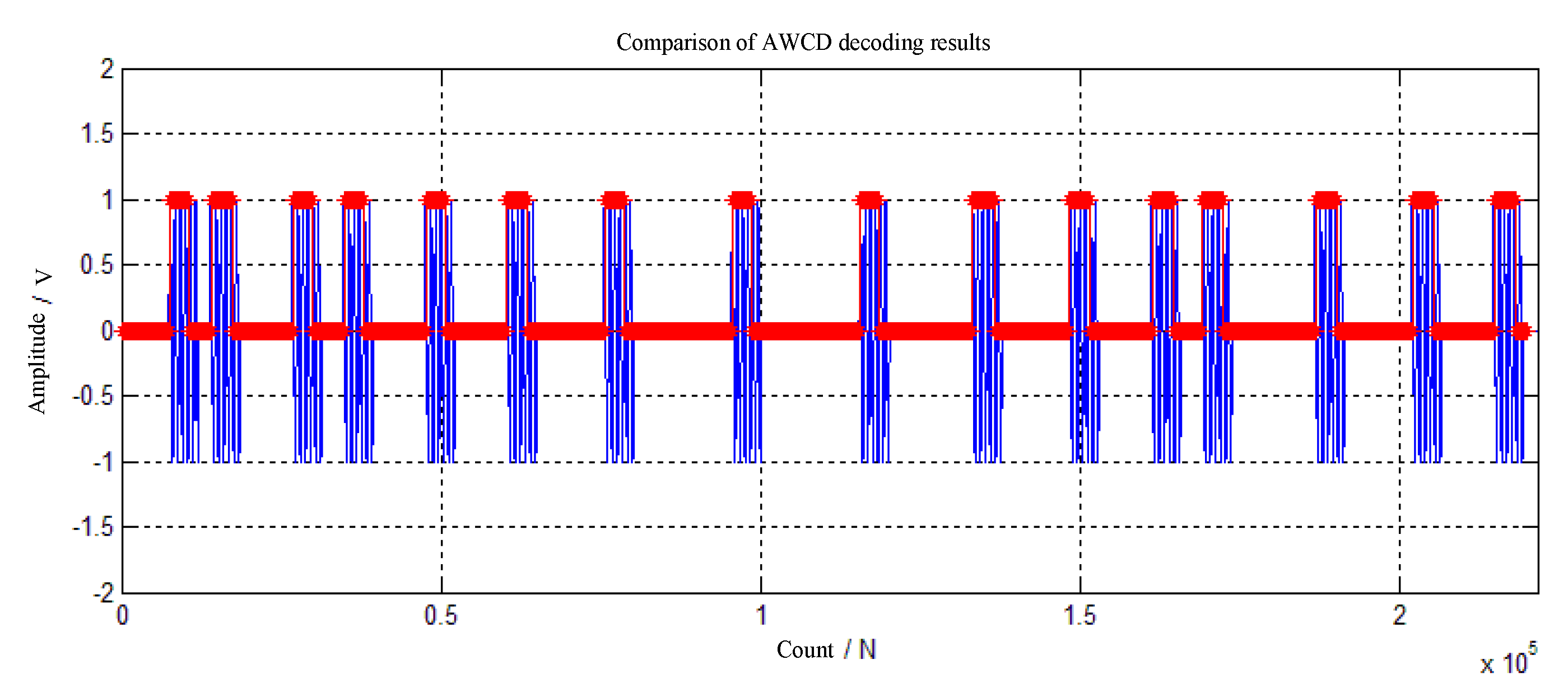
3.4. The Framework of Adaptive Wiener Correlation Detection (AWCD)
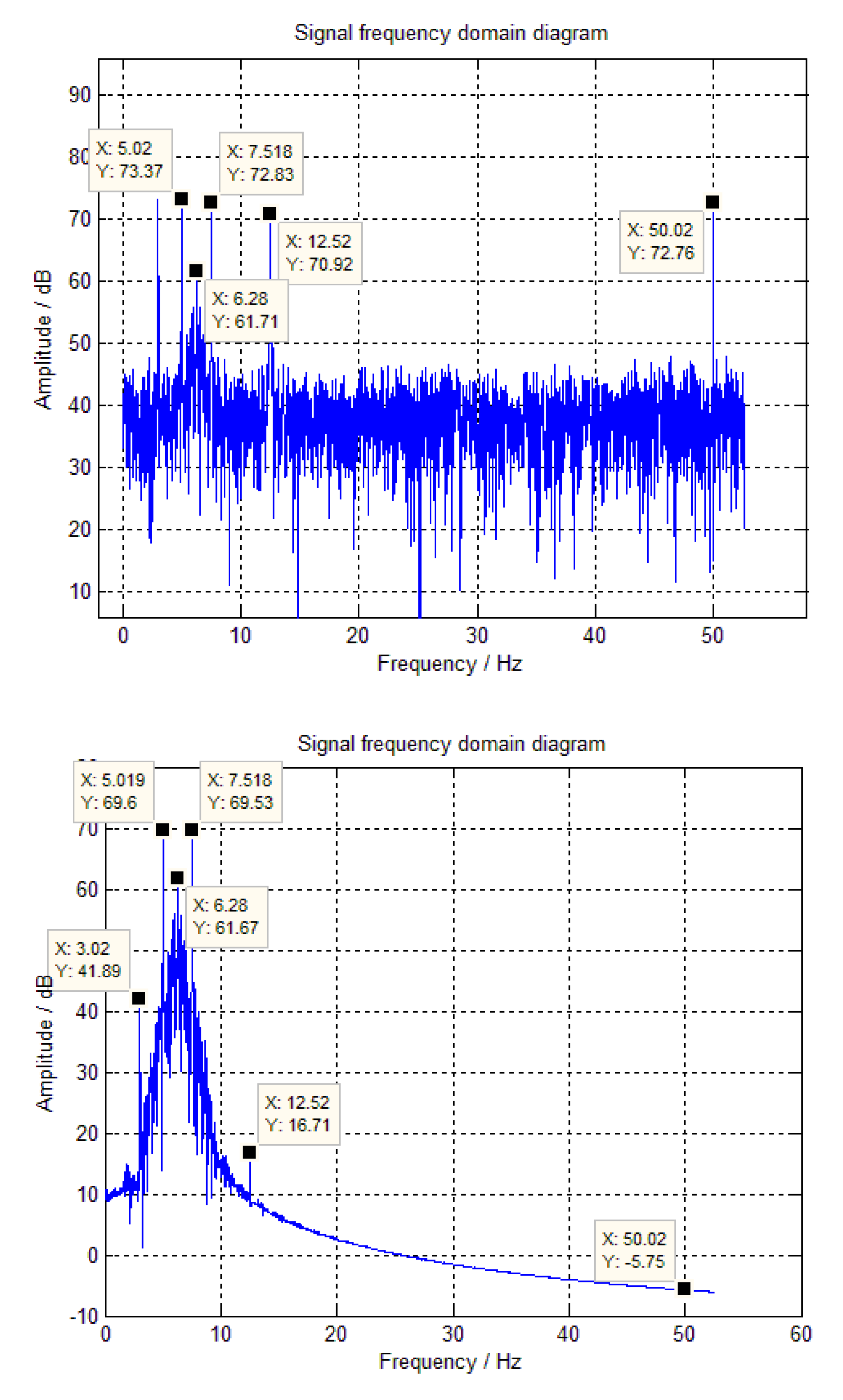
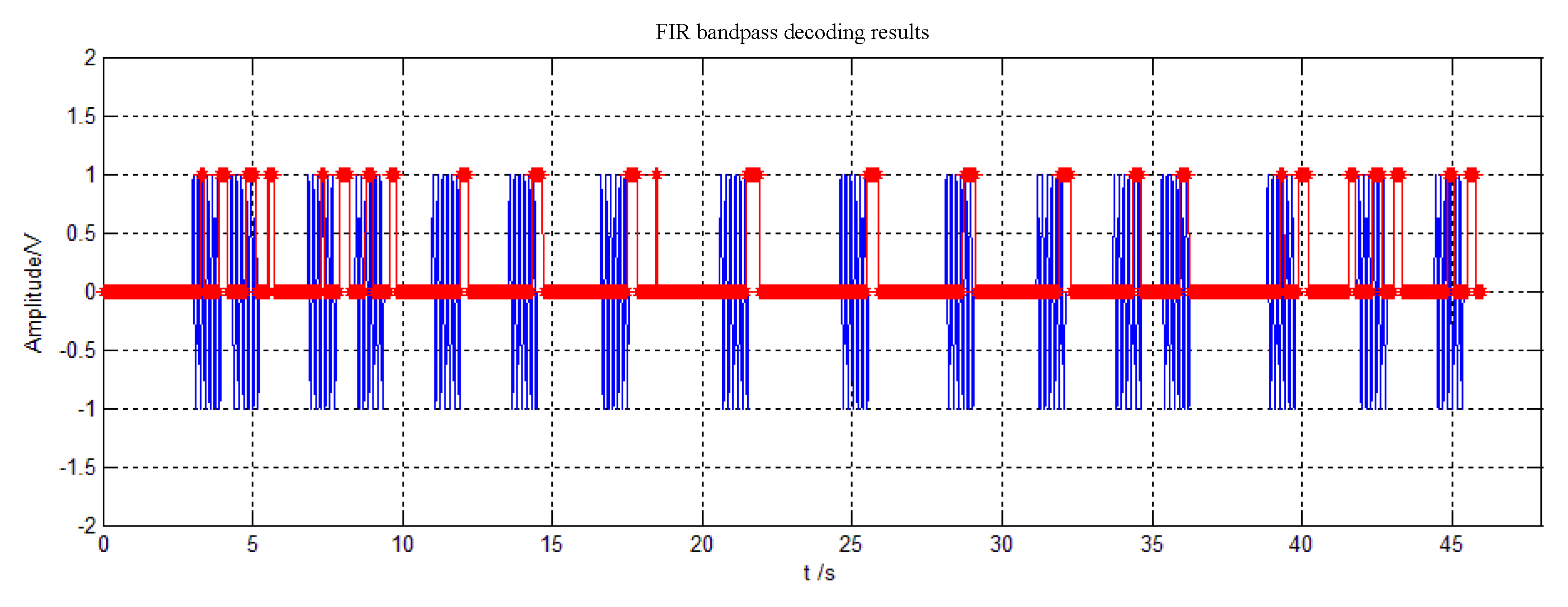
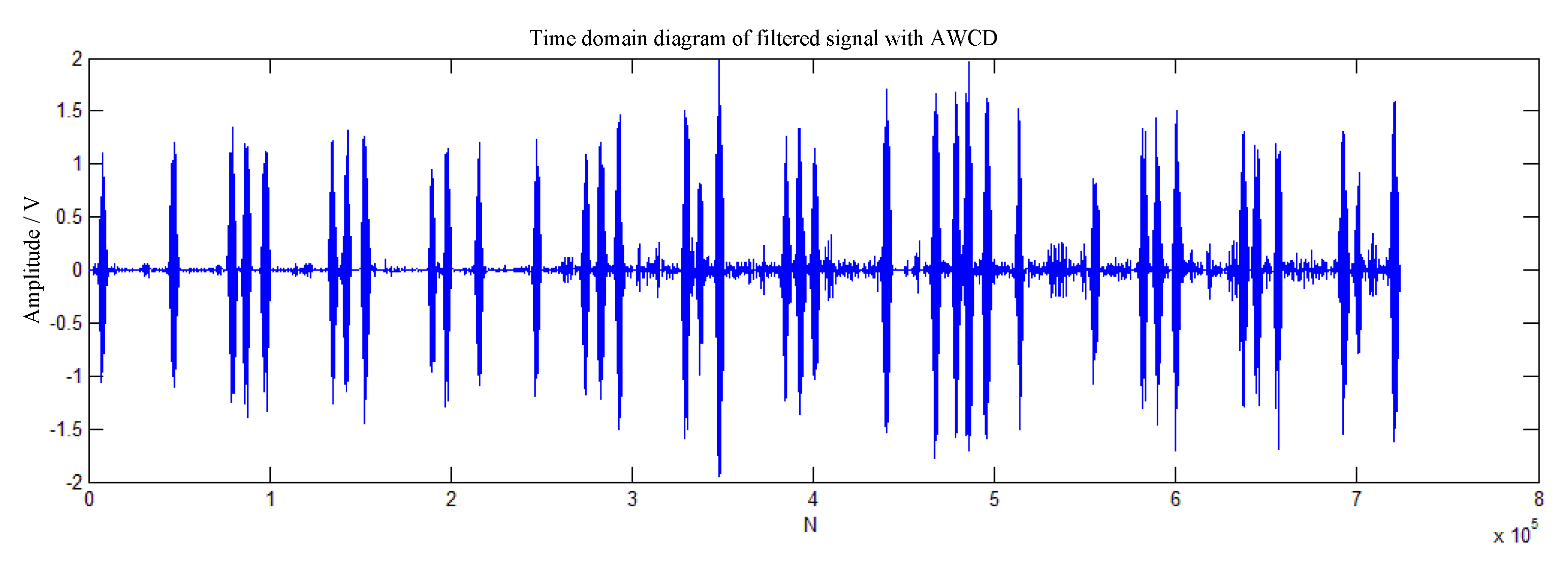
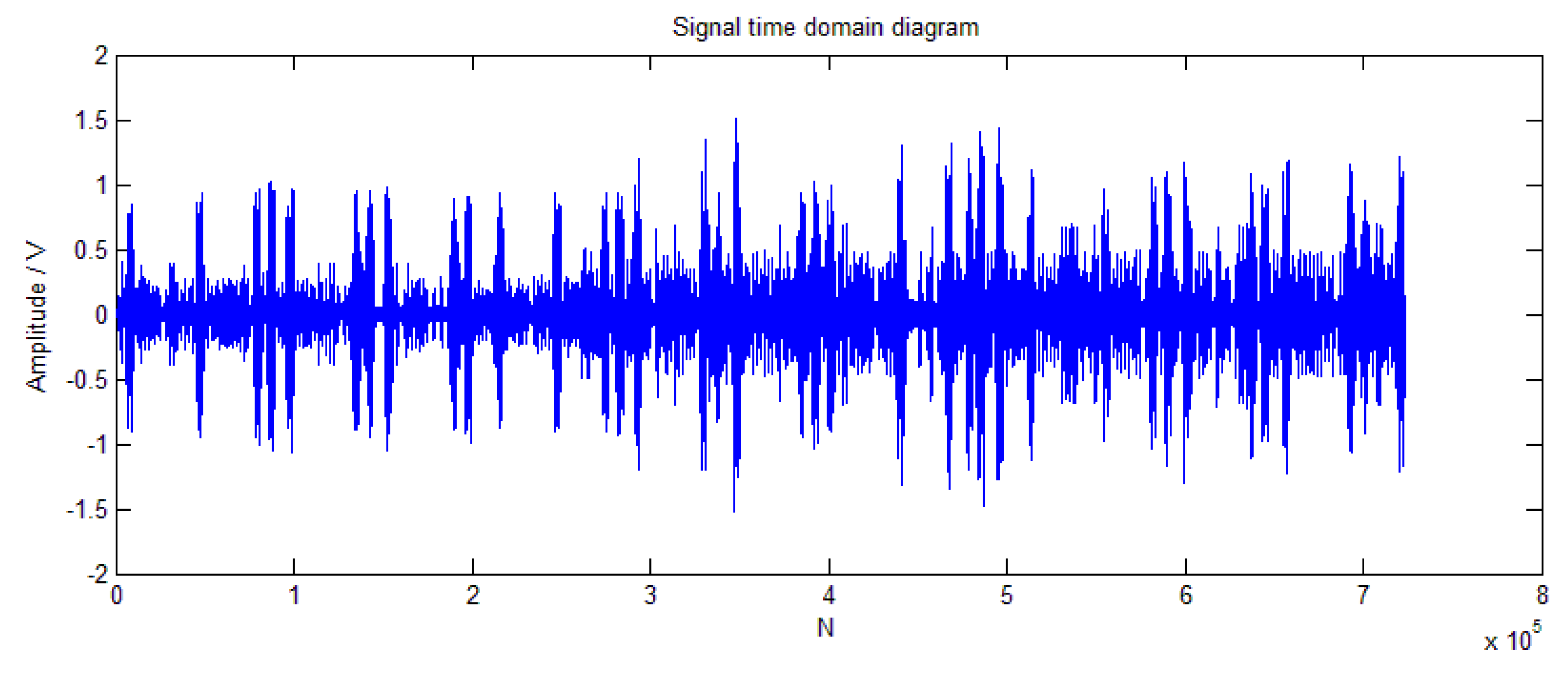
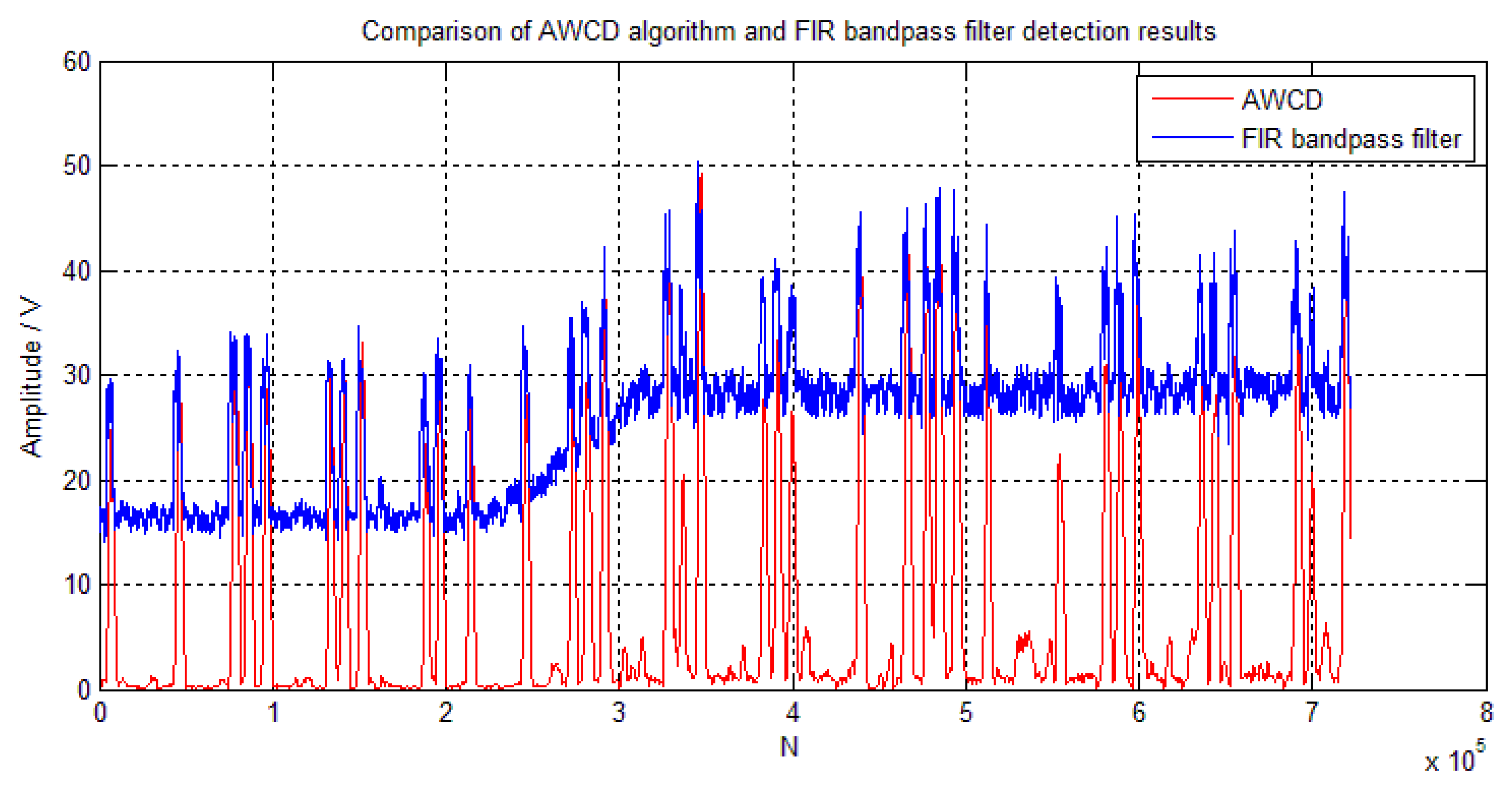
3.5. Simulation Analysis
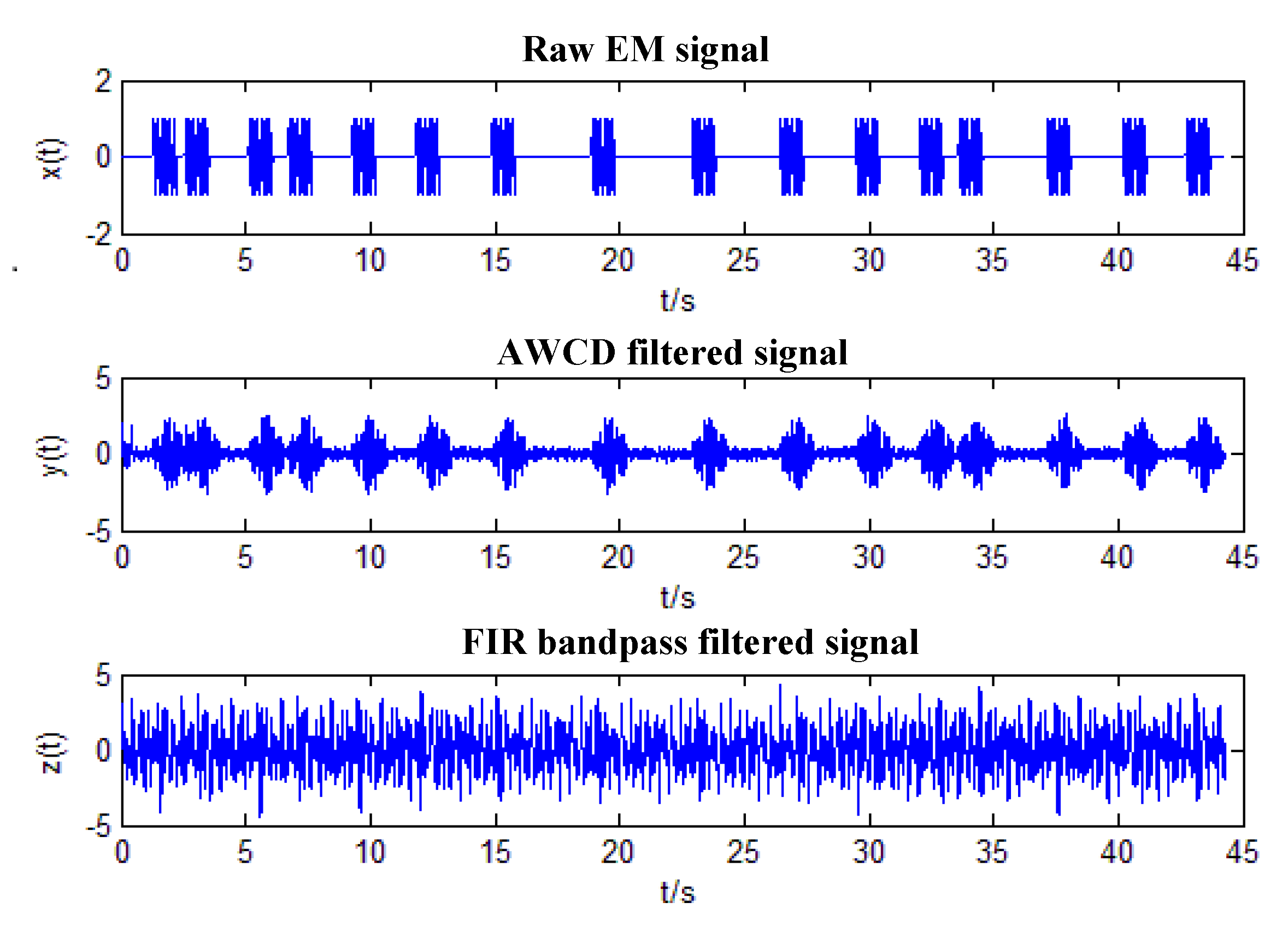
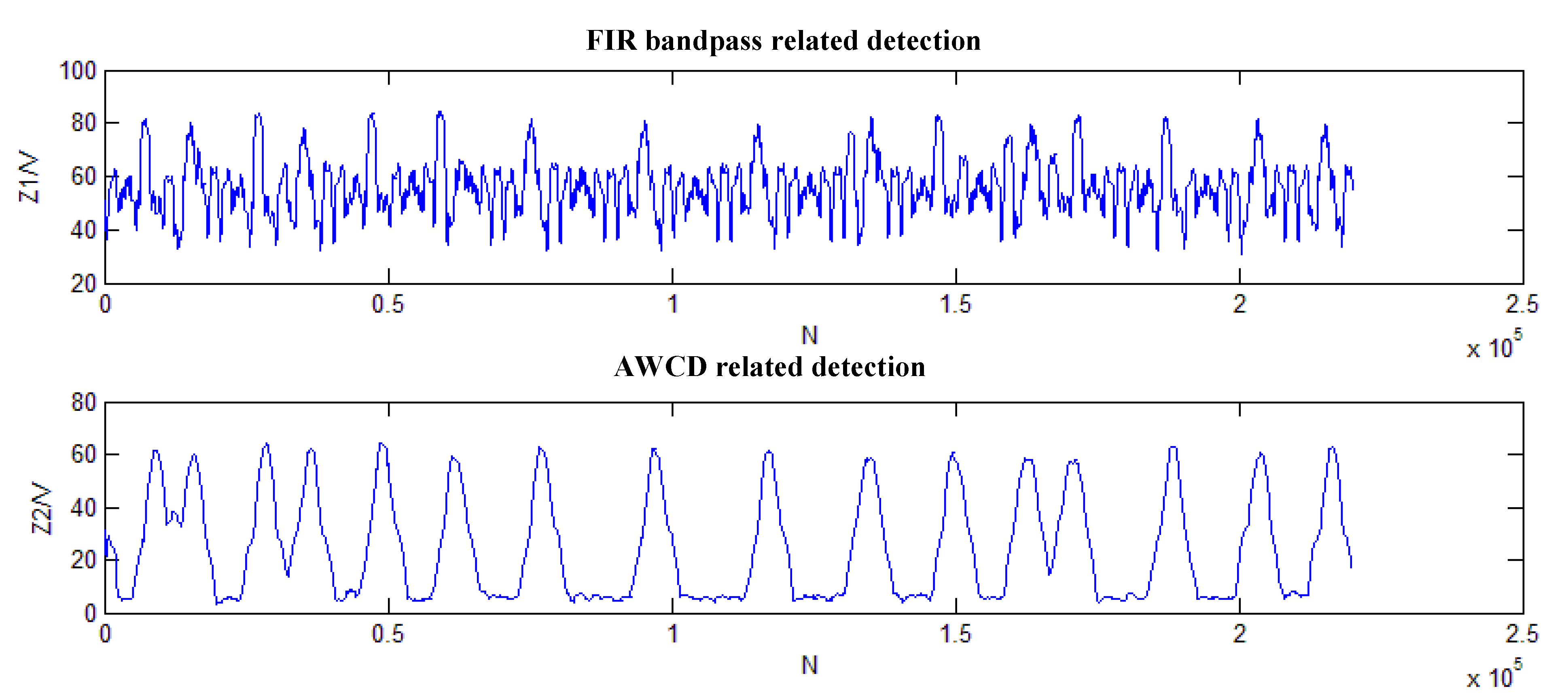
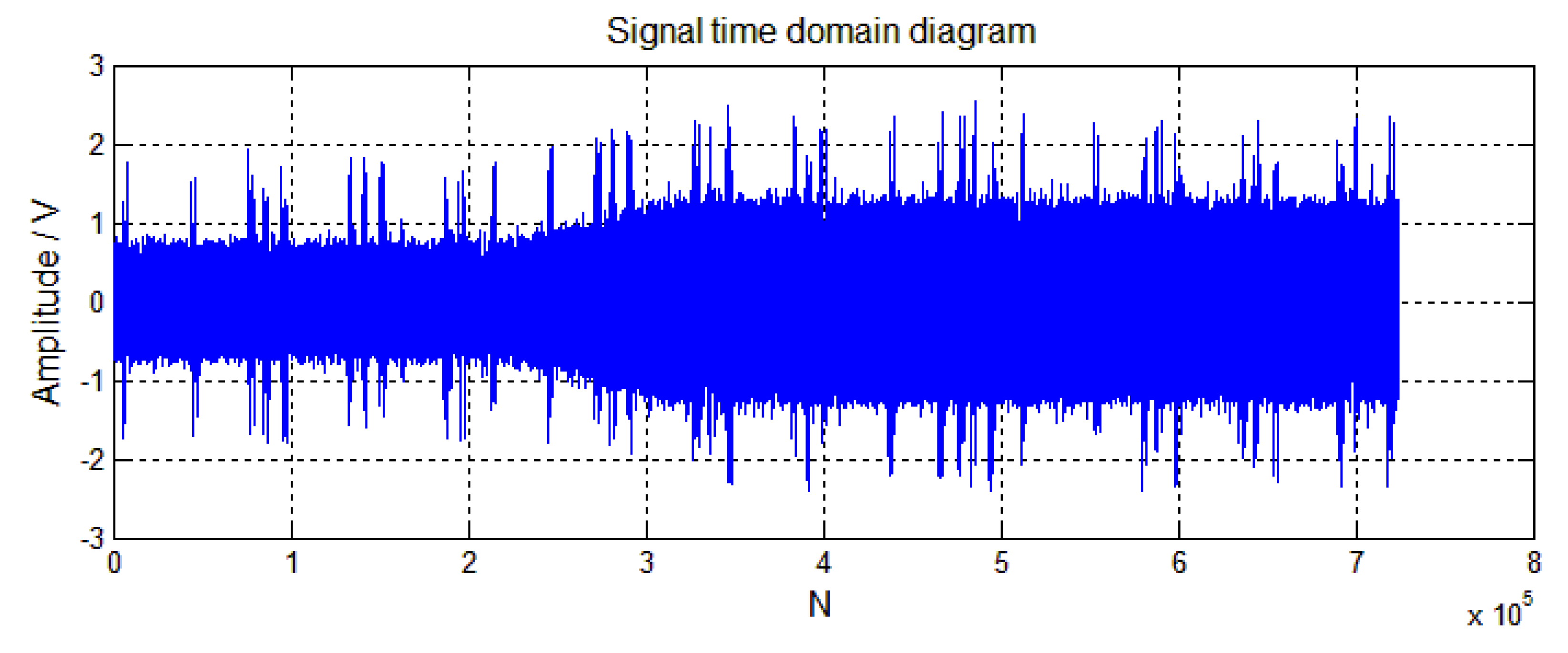
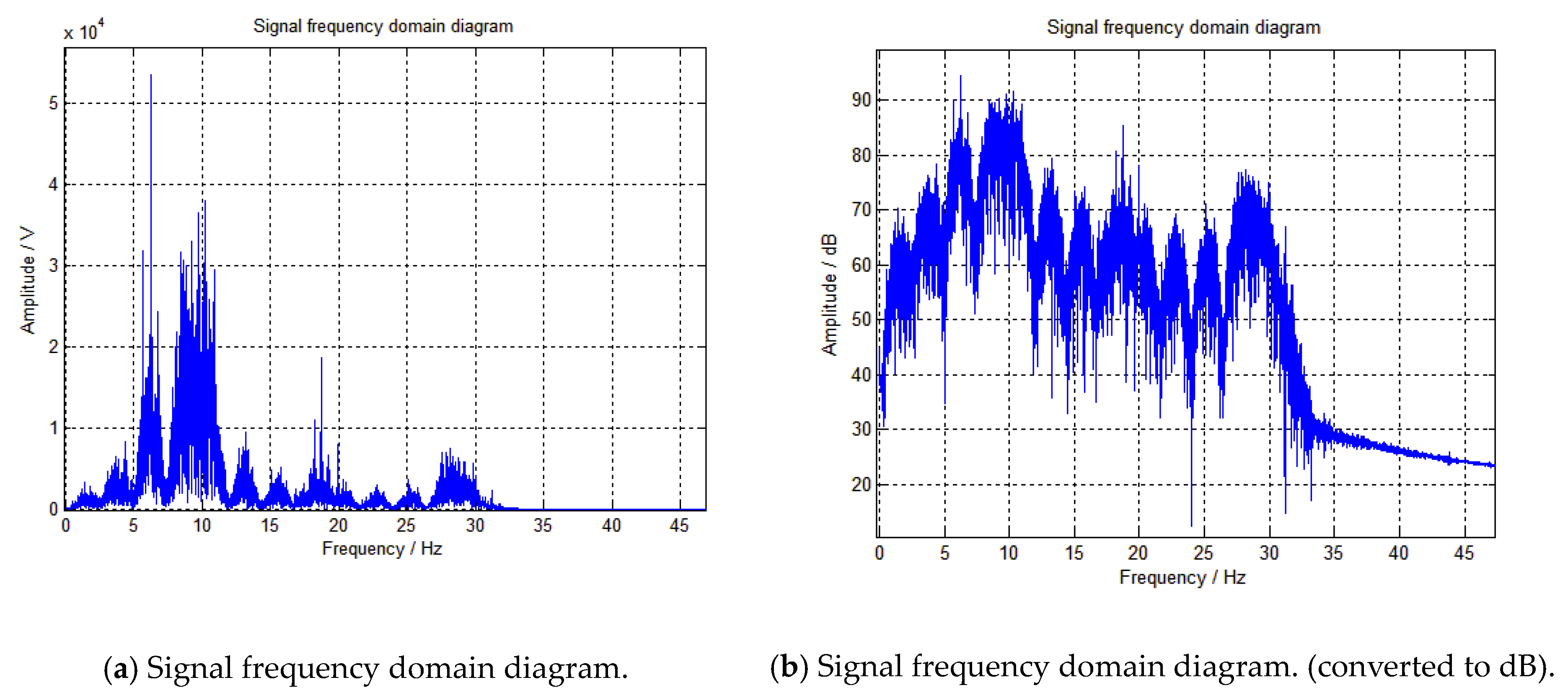
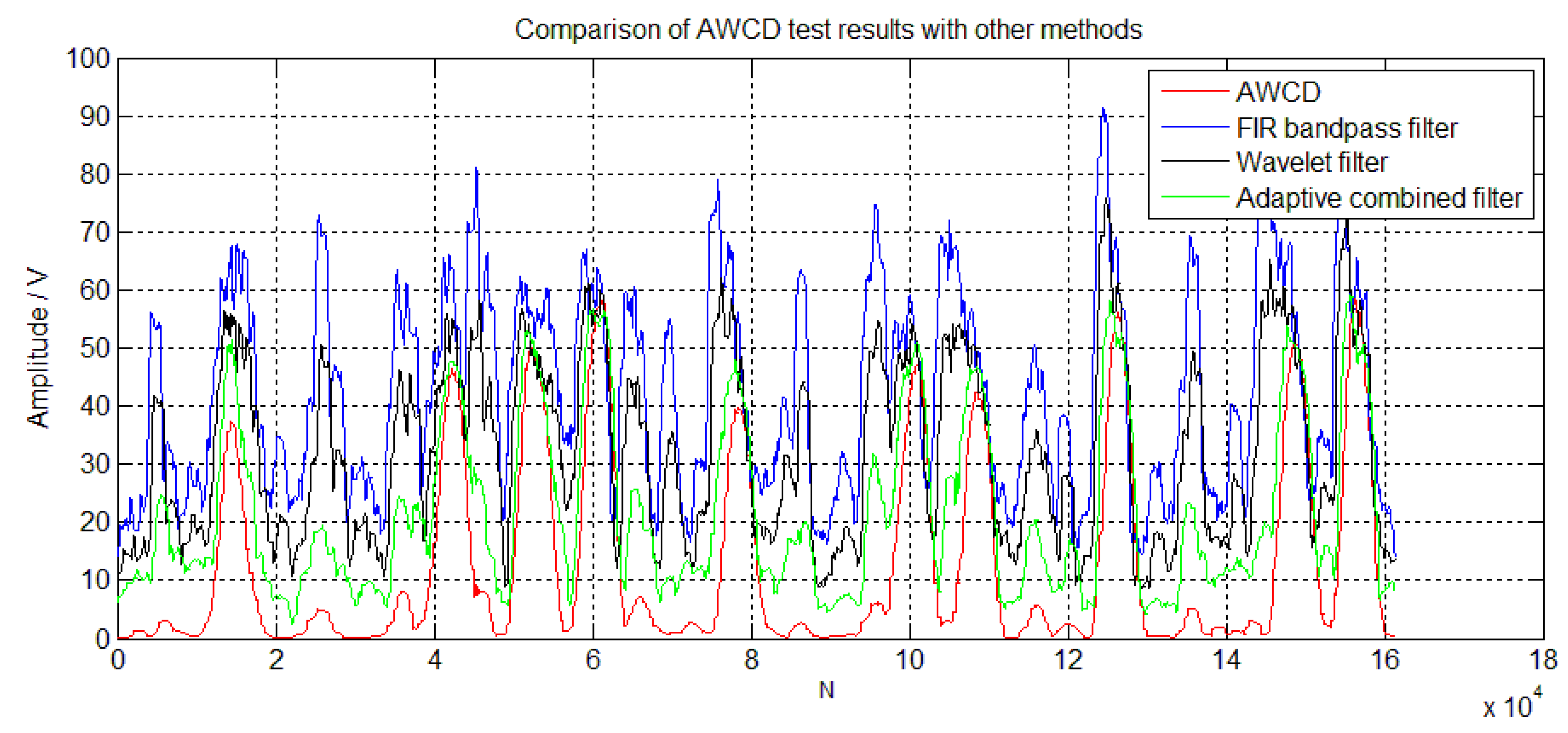
3.6. Analysis and Verification by Field Data
4. Summary
Author Contributions
Funding
Conflicts of Interest
References
- Reeves, M.; MacPherson, J.; Zaeper, R.; Bert, D.R.; Shursen, J.; Armagost, W.K.; Pixton, D.S.; Hernandez, M. High-speed drillstring telemetry network enables new real-time drilling and measurement technologies[C]HIADC/SPE Drilling Conference. Soc. Pet. Eng. 2006, 1017–1022. Available online: https://www.onepetro.org/conference-paper/SPE-99134-MS (accessed on 13 January 2020).
- Trofimenkoff, F.N.; Segal, M.; Klassen, A.; Haslett, J.W. Characterization of EM downhole-to-surface communication links. IEEE Trans. Geosci. Remote. Sens. 2000, 38, 2539–2548. [Google Scholar]
- Fan, Y.H.; Li, W.; Nie, Z.P.; Yang, Z.Q.; Sun, X.Y. Analysis of EM-MWD channel based on NMM. Chin. J. Geophys. 2016, 59, 1125–1130. [Google Scholar]
- Lu, C.D.; Du, H.B.; Wang, J.H.; Zhang, C. A Design of EM-MWD Signal Receiver Circuit Based on STM32. Chin. J. Eng. Geophys. 2015, 12, 423–427. [Google Scholar]
- Dong, X.N.; Wang, C.L. MWD system based on wavelet transformation and pattern recognition communication signal processing method and research. Electron. Meas. Technol. 2016, 39, 146–149. [Google Scholar]
- Long, L.; Chen, Q.; Liu, F. Research on eliminating interference signal algorithm of EM-MWD. Chin. J. Sci. Instrum. 2014, 35, 2144–2152. [Google Scholar]
- Wang, H.L.; Hong, H.B.; Jiang, G.S.H. Design of EM-MWD signal detection system based on correlation andadaptive filter. Chin. J. Sci. Instrum. 2012, 33, 1013–1018. [Google Scholar]
- Whitacre, T.; Yu, X.H. A neural network receiver for EM-MWD baseband communication systems. IJCNN IEEE 2009, 3360–3364. Available online: https://ieeexplore.ieee.xilesou.top/abstract/document/5178838 (accessed on 13 January 2020).
- Li, F.K.; Yang, Z.Q.; Fan, Y.H.; Hao, C.; Zhu, G.; Jin, Y.; Fang, J.; Li, T. Multiple Combinational Algorithm to Adaptively Track and Detect Measurement While Drilling Electromagnetic Wave Signal. IEEE Conf. Publ. (ISAPE) 2018, 1–5. Available online: https://ieeexplore.ieee.xilesou.top/abstract/document/8634120 (accessed on 13 January 2020).
- Fan, Y.H.; Nie, Z.P.; Li, T.L. EM channel theory model and characteristics analysis for MWD. Chin. J. Radio Sci. 2013, 28, 909–914. [Google Scholar]
- Li, C. Mathematical Modeling and Signal Characteristics Analysis of Drilling Fluid Pressure MPSK Signal Based on Pulse Width and Pulse Position Modulation. Master Thesis, China University of Petroleum, Qingdao, China, 2010. [Google Scholar]
- Hamkins, J. Pulse Position Modulation. Handb. Comput. Netw. 2011, 1, 492–508. [Google Scholar]
- Abdallah, S.A. Turbo Coded Pulse Position Modulation for Optical Communications. Ph.D. Thesis, Georgia Institute of Technology, Atlanta, GA, USA, 2003. [Google Scholar]
- Macpherson, J.; Gregg, T. Microhole Wireless Steering While Drilling System. Baker Hughes Oilfield Oper. 2007, 19–20. [Google Scholar]
- Zhao, J.; Wang, L.; Sheng, L.; Wang, J. A nonlinear method for filtering noise and interference of pulse signal in measurement while drilling. Acta Pet. Sin. 2008, 29, 596–600. [Google Scholar]
- Guo, J.; Liu, H.; Quan, J. Analysis and Control of System Noise in MWD. Oil Field Equip. 2008, 37, 10–13. [Google Scholar]
- John, G.; Proakis, D.; Manolakis, G. Digital Signal Processing—Principles, Algorithms and Applications, 4th ed.; Publishing House of Electronics Industry: Beijing, China, 2013; pp. 863–871. [Google Scholar]
- Hu, G.S. Theory, Algorithm and Realization of Digital Signal Process; Tsinghua University Press: Beijing, China, 2012; pp. 246–252, 608–620. [Google Scholar]
- Li, F.K.; Yang, Z.Q.; Hao, C. Application of weak signal nonlinear detection on MWD electromagnetic Wave. Chin. J. Radio Sci. 2018, 33, 48–55. [Google Scholar]
- Li, M.Y.; Bai, P. Design of adaptive line enhancement system based on FPGA. Mod. Electron. Technol. 2010, 33, 118–121. [Google Scholar]
- Zhang, S.; Zhang, J.; Thus, H. Mean square deviation analysis of LMS and NLMS algorithms with white reference inputs. Signal Process. 2017, 131, 20–26. [Google Scholar] [CrossRef] [Green Version]
- Gao, J.Z. Detection of Weak signals. Available online: https://xs.gufenxueshu.com/books?hl=zhCN&lr=&id=pGSwgjQ9BkgC&oi=fnd&pg=PA5&dq=%E5%BE%AE%E5%BC%B1%E4%BF%A1%E5%8F%B7%E6%A3%80%E6%B5%8B&ots=n4E4hqWrsj&sig=UBbXO1OWJk1d3Zte7HAnd5h8CrY#v=onepage&q=%E5%BE%AE%E5%BC%B1%E4%BF%A1%E5%8F%B7%E6%A3%80%E6%B5%8B&f=false (accessed on 13 January 2020).
- Li, G.; Wang, J.; Liang, J.; Yue, C.Y. Application of sliding nest window control chart in data stream anomaly detection. Symmetry 2018, 10, 113. [Google Scholar] [CrossRef] [Green Version]
- Li, G.; Wang, J.; Liang, J.; Yue, C.Y. The application of a double CUSUM algorithm in industrial data stream anomaly detection. Symmetry 2018, 10, 264. [Google Scholar] [CrossRef] [Green Version]






© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, F.; Yang, Z.; Fan, Y.; Li, Y.; Li, G. Application of a New Combination Algorithm in ELF-EM Processing. Symmetry 2020, 12, 337. https://doi.org/10.3390/sym12030337
Li F, Yang Z, Fan Y, Li Y, Li G. Application of a New Combination Algorithm in ELF-EM Processing. Symmetry. 2020; 12(3):337. https://doi.org/10.3390/sym12030337
Chicago/Turabian StyleLi, Fukai, Zhiqiang Yang, Yehuo Fan, Yuchun Li, and Guang Li. 2020. "Application of a New Combination Algorithm in ELF-EM Processing" Symmetry 12, no. 3: 337. https://doi.org/10.3390/sym12030337