Navigators’ Errors in a Ship Collision via Simulation Experiment in South Korea


Abstract
1. Introduction
2. Classification of Navigators’ Errors
3. Materials and Methods
3.1. Participants
3.2. Materials
3.3. Procedure and Scenarios
3.4. Navigator Error Measurement Checklist
4. Results
4.1. Frequency Calculation for Navigator Errors
4.2. Correlation Analysis Between Navigator Errors and Ship Collision
5. Discussion
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Montewka, J.; Krata, P.; Goerlandt, F.; Mazaheri, A.; Kujala, P. Marine traffic risk modeling—An innovative approach and a case study. Proc. Inst. Mech. Eng. Part O J. Risk Reliab. 2011, 225, 307–322. [Google Scholar]
- Rothblum, A.M. Human error and marine safety. In National Safety Council Congress and Expo; U.S. Coast Guard Research & Development Center: Orlando, FL, USA, 2000. [Google Scholar]
- Hanzu-Pazara, R.; Barsan, E.; Arsenie, P.; Chiotoroiu, L.; Raicu, G. Reducing of maritime accidents caused by human factors using simulators in training process. J. Marit. Res. 2008, 5, 3–18. [Google Scholar]
- Cacciabue, P.C. Human error risk management for engineering systems: A methodology for design, safety assessment, accident investigation and training. Reliab. Eng. Syst. Saf. 2004, 83, 229–240. [Google Scholar] [CrossRef]
- Reason, J. Human error: Models and management. BMJ 2000, 320, 768–770. [Google Scholar] [CrossRef]
- Lin, C.J.; Shiang, W.J.; Chuang, C.Y.; Liou, J.L. Applying the skill-rule-knowledge framework to understanding operators’ behaviors and workload in advanced main control rooms. Nucl. Eng. Des. 2014, 270, 176–184. [Google Scholar] [CrossRef]
- Lin, B. Behavior of ship officers in maneuvering to prevent a collision. J. Mar. Sci. Technol. 2006, 14, 225–230. [Google Scholar]
- KMST. Available online: http://data.kmst.go.kr/kmst/verdict/writtenverdict/selectwrittenverdict.do (accessed on 5 May 2019).
- Celik, M.; Cebi, S. Analytical HFACS for investigating human errors in shipping accidents. Accid. Anal. Prev. 2009, 41, 66–75. [Google Scholar] [CrossRef]
- Cordon, J.R.; Mestre, J.M.; Walliser, J. Human factors in seafaring: The role of situation awareness. Saf. Sci. 2017, 93, 256–265. [Google Scholar] [CrossRef]
- Chauvin, C.; Clostermann, J.P.; Hoc, J.M. Impact of training programs on decision-making and situation awareness of trainee watch officers. Saf. Sci. 2009, 47, 1222–1231. [Google Scholar] [CrossRef]
- Sandhåland, H.; Oltedal, H.; Eid, J. Situation awareness in bridge operations—A study of collisions between attendant vessels and offshore facilities in the North Sea. Saf. Sci. 2015, 79, 277–285. [Google Scholar] [CrossRef]
- Procee, S.; Borst, C.; Van Paassen, M.M.; Mulder, M.; Bertram, V. Using Augmented Reality to Improve Collision Avoidance and Resolution. In Proceedings of the COMPIT’18: 17th International Conference on Computer and IT Applications in the Maritime Industries, Pavone, Italy, 14–16 May 2018. [Google Scholar]
- Illankoon, P.; Tretten, P.; Kumar, U. Modelling human cognition of abnormal machine behaviour. Hum. Intell. Syst. Integr. 2019, 1, 3–26. [Google Scholar] [CrossRef]
- Yim, J.B.; Park, D.J.; Youn, I.H. Development of Navigator Behavior Models for the Evaluation of Collision Avoidance Behavior in the Collision-Prone Navigation Environment. App. Sci. 2019, 9, 3114. [Google Scholar] [CrossRef]
- Yim, J.B. A study on the analysis and identification of seafarers’ skill-rule-knowledge inherent in maritime accidents. J. Korean Soc. Mar. Environ. Saf. 2017, 23, 224–230. [Google Scholar] [CrossRef]
- Rasmussen, J. Skills, rules, and knowledge: Signals, signs, and symbols, and other distinctions in human performance models. IEEE Trans. Syst. Man. Cybern. 1983, 3, 257–266. [Google Scholar] [CrossRef]
- Reason, J. Human Error; Cambridge University Press: London, UK, 1990. [Google Scholar]
- Kozak, J.J.; Hancock, P.A.; Arthur, E.J.; Chrysler, S.T. Transfer of training from virtual reality. Ergonomics 1993, 36, 777–784. [Google Scholar] [CrossRef]
- Stone, R. Virtual reality for interactive training: An industrial practitioner’s viewpoint. Int. J. Hum. Comput. Stud. 2001, 55, 699–711. [Google Scholar] [CrossRef]
- Gould, K.S.; Røed, B.K.; Saus, E.R.; Koefoed, V.F.; Bridger, R.S.; Moen, B.E. Effects of navigation method on workload and performance in simulated high-speed ship navigation. Appl. Ergon. 2009, 40, 103–114. [Google Scholar] [CrossRef]
- Norman, D.A. The Design of Everyday Things: Revised and Expanded Edition; Constellation: London, UK, 2013. [Google Scholar]
- Lin, C.J.; Yenn, T.C.; Yang, C.W. Optimizing human–system interface automation design based on a skill-rule-knowledge framework. Nucl. Eng. Des. 2010, 240, 1897–1905. [Google Scholar] [CrossRef]
- Hogenboom, I.; Kristensen, A.S. Comparison of Human Reliability Analysis Method. Master’s Thesis, Aalborg University Esbjerg, Esbjerg, Denmark, 2018. [Google Scholar]
- IMO. Convention on the International Regulations for Preventing Collisions at Sea, [with Amendments Adopted from December 2009]; International Maritime Organization: London, UK, 1972. [Google Scholar]
- Drivalou, S.; Marmaras, N. Supporting skill-, rule-, and knowledge-based behaviour through an ecological interface: An industry-scale application. Int. J. Ind. Ergon. 2009, 39, 947–965. [Google Scholar] [CrossRef]
- Reason, J.; Manstead, A.; Stradling, S.; Baxter, J.; Campbell, K. Errors and violations on the roads: A real distinction. Ergonomics 1990, 33, 1315–1332. [Google Scholar] [CrossRef]
- Wentink, M.; Stassen, L.P.S.; Alwayn, I.; Hosman, R.J.A.W.; Stassen, H.G. Rasmussen’s model of human behavior in laparoscopy training. Surg. Endosc. Other Interv. Tech. 2003, 17, 1241–1246. [Google Scholar]
- Embrey, D. Understanding human behaviour and error. Hum. Reliab. Assoc. 2005, 1, 1–10. [Google Scholar]
- KMST. Statistical Year Book for Maritime Accidents; Korean Maritime Safety Tribunals, Korea: Sejong, Korea, 2017. [Google Scholar]
- Youn, I.H.; Park, D.J.; Yim, J.B. Analysis of lookout activity in a simulated environment to investigate maritime accidents caused by human error. App. Sci. 2019, 9, 4. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
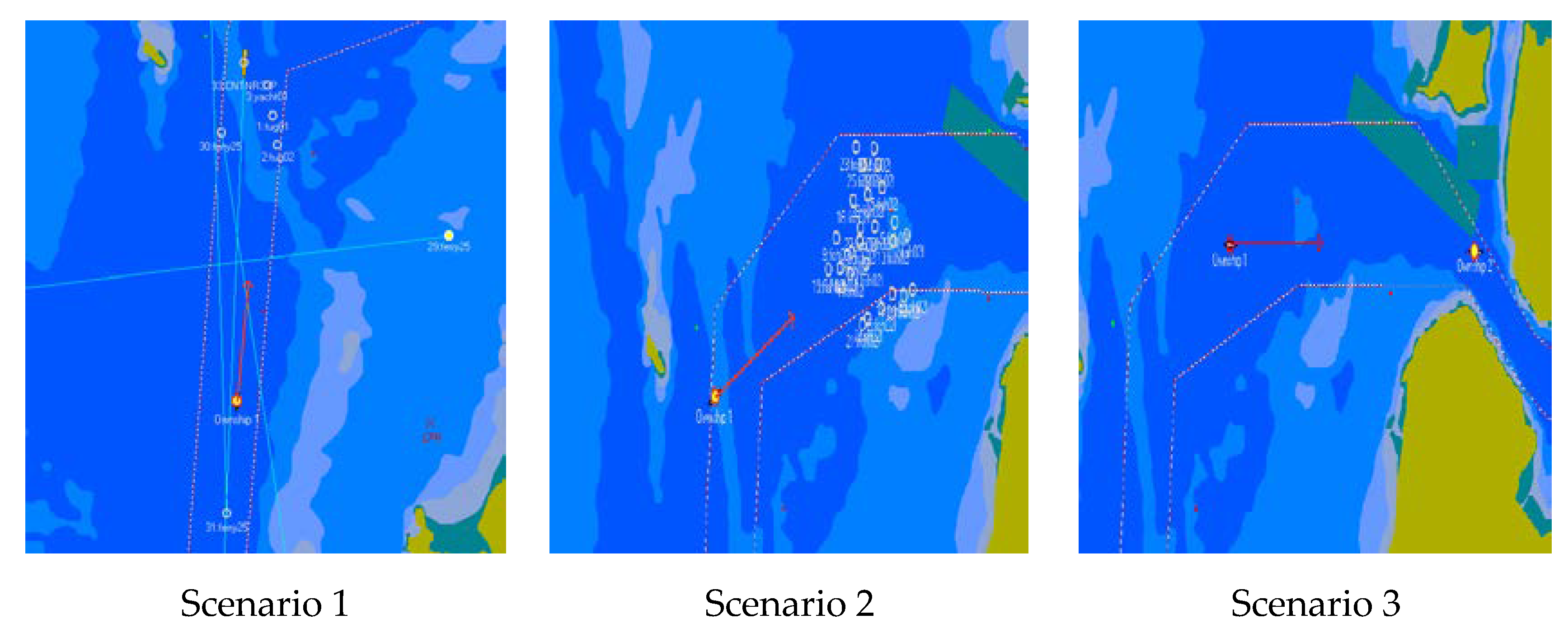
| No. | Selected Scenarios | Duration |
|---|---|---|
| 1 | The situation where multiple ships cross the ship’s route | 10 min |
| 2 | The situation of meeting with many fishing boats under restricted visibility | 8 min |
| 3 | In a head-on situation, sudden turn of a not-under-command vessel | 8 min |
| Observation | Number of Questions in Each Checklist | ||||
|---|---|---|---|---|---|
| Step | Factor | Checklist 1 | Checklist 2 | Checklist 3 | Sum |
| 1 | SBS | 5 | 5 | 5 | 15 |
| 2 | RBM | 5 | 5 | 5 | 15 |
| 3 | KBM | 1 | 1 | 1 | 3 |
| Sum | 11 | 11 | 11 | 33 | |
| Result | Collision | 1 | 1 | 1 | 3 |
| Step | Number | Human Error Classification | Questions in Checklists | Response = Yes/No (1/0) |
|---|---|---|---|---|
| Step 1 | 1 | SBS | Did the participant check the course and speed of other ships on the radar? | |
| 2 | SBS | Was the rudder operation appropriate? | ||
| 3 | SBS | Was the telegraph operation appropriate? | ||
| 4 | SBS | Was the visual lookout appropriate? | ||
| 5 | SBS | Was the radar lookout appropriate? | ||
| Step 2 | 1 | RBM | Did the participant take the avoidance action following the procedure applied to the crossing situation? | |
| 2 | RBM | Did the participant take the collision-avoidance action according to international regulations for preventing a collision at sea? | ||
| 3 | RBM | Did the participant follow the route? | ||
| 4 | RBM | Did the participant use navigation information such as the bow crossing range? | ||
| 5 | RBM | Were the acceptable ranges such as the closest point approach appropriate? | ||
| Step 3 | 1 | KBM | Was the action plan set in a situation where multiple ships cross the ship’s route appropriate? |
| Step | Number | Human Error Classification | Questions in Checklists | Response = Yes/No (1/0) |
|---|---|---|---|---|
| Steps 1 and 2 are similar to those listed in Table 3 | ||||
| Step 3 | 1 | KBM | Was the plan set in the situation of meeting with many fishing boats under restricted visibility appropriate? | |
| Step | Number | Human Error Classification | Questions in Checklists | Response = Yes/No (1/0) |
|---|---|---|---|---|
| Steps 1 and 2 are similar to those listed in Table 3 | ||||
| Step 3 | 1 | KBM | Was the plan set in a head-on situation, the sudden turn of the not-under-command vessel appropriate? | |
| Step | Scenario 1 (n = 30) | Scenario 2 (n = 6) | Scenario 3 (n = 28) | Sum (n = 64) | |||||
|---|---|---|---|---|---|---|---|---|---|
| Yes (1) | No (0) | Yes (1) | No (0) | Yes (1) | No (0) | Yes (1) | No (0) | ||
| 1 | Fr. | 95 | 55 | 21 | 9 | 98 | 42 | 214 | 106 |
| % | 63.33 | 36.67 | 70.00 | 30.00 | 70.00 | 30.00 | 66.88 | 33.12 | |
| 2 | Fr. | 81 | 69 | 14 | 16 | 86 | 54 | 181 | 139 |
| % | 54.00 | 46.00 | 46.67 | 53.33 | 61.43 | 38.57 | 56.56 | 43.44 | |
| 3 | Fr. | 0 | 30 | 0 | 6 | 2 | 26 | 2 | 62 |
| % | 0.00 | 100.00 | 0.00 | 100.00 | 7.14 | 92.86 | 3.13 | 96.87 | |
| Sum | Fr. | 176 | 154 | 35 | 31 | 186 | 122 | 397 | 307 |
| % | 53.33 | 46.67 | 53.03 | 46.97 | 60.39 | 39.61 | 56.39 | 43.61 | |
| Step | Scenario 1 (n = 19) | Scenario 2 (n = 44) | Scenario 3 (n = 23) | Sum (n = 86) | |||||
|---|---|---|---|---|---|---|---|---|---|
| Yes (1) | No (0) | Yes (1) | No (0) | Yes (1) | No (0) | Yes (1) | No (0) | ||
| 1 | Fr. | 69 | 26 | 149 | 71 | 90 | 25 | 308 | 122 |
| % | 72.63 | 27.37 | 67.73 | 32.27 | 78.26 | 21.74 | 71.63 | 28.37 | |
| 2 | Fr. | 67 | 28 | 130 | 90 | 88 | 27 | 285 | 145 |
| % | 70.53 | 29.47 | 59.09 | 40.91 | 76.52 | 23.48 | 66.28 | 33.72 | |
| 3 | Fr. | 16 | 3 | 33 | 11 | 21 | 2 | 70 | 16 |
| % | 84.21 | 15.79 | 75.00 | 25.00 | 91.30 | 8.70 | 81.40 | 18.60 | |
| Sum | Fr. | 152 | 57 | 312 | 172 | 199 | 54 | 663 | 283 |
| % | 72.73 | 27.27 | 64.46 | 35.54 | 78.66 | 21.34 | 70.08 | 29.92 | |
| SBS | RBM | KBM | Collision | |
| SBS | 1.000 | |||
| RBM | 0.620** | 1.000 | ||
| KBM | 0.430** | 0.568** | 1.000 | |
| Collision | 0.308** | 0.545** | 0.686** | 1.000 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Park, D.-J.; Yim, J.-B.; Yang, H.-S.; Lee, C.-k. Navigators’ Errors in a Ship Collision via Simulation Experiment in South Korea. Symmetry 2020, 12, 529. https://doi.org/10.3390/sym12040529
Park D-J, Yim J-B, Yang H-S, Lee C-k. Navigators’ Errors in a Ship Collision via Simulation Experiment in South Korea. Symmetry. 2020; 12(4):529. https://doi.org/10.3390/sym12040529
Chicago/Turabian StylePark, Deuk-Jin, Jeong-Bin Yim, Hyeong-Sun Yang, and Chun-ki Lee. 2020. "Navigators’ Errors in a Ship Collision via Simulation Experiment in South Korea" Symmetry 12, no. 4: 529. https://doi.org/10.3390/sym12040529
APA StylePark, D.-J., Yim, J.-B., Yang, H.-S., & Lee, C.-k. (2020). Navigators’ Errors in a Ship Collision via Simulation Experiment in South Korea. Symmetry, 12(4), 529. https://doi.org/10.3390/sym12040529