Vision/Position Hybrid Control for a Hexa Robot Using Bacterial Foraging Optimization in Real-time Pose Adjustment



Abstract
:
1. Introduction
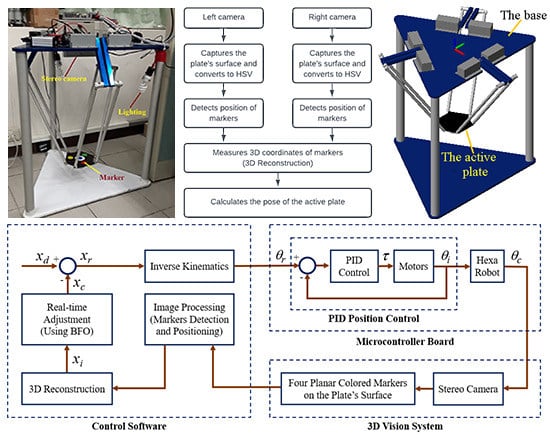
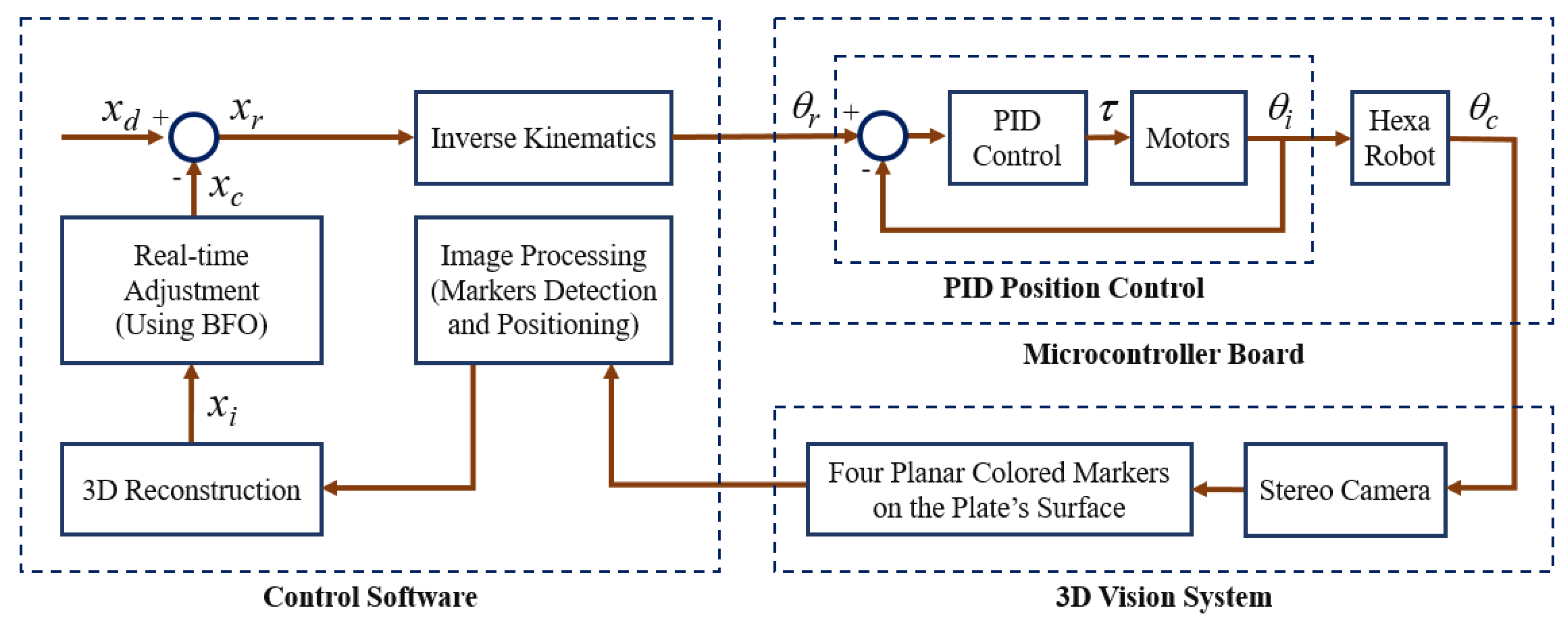
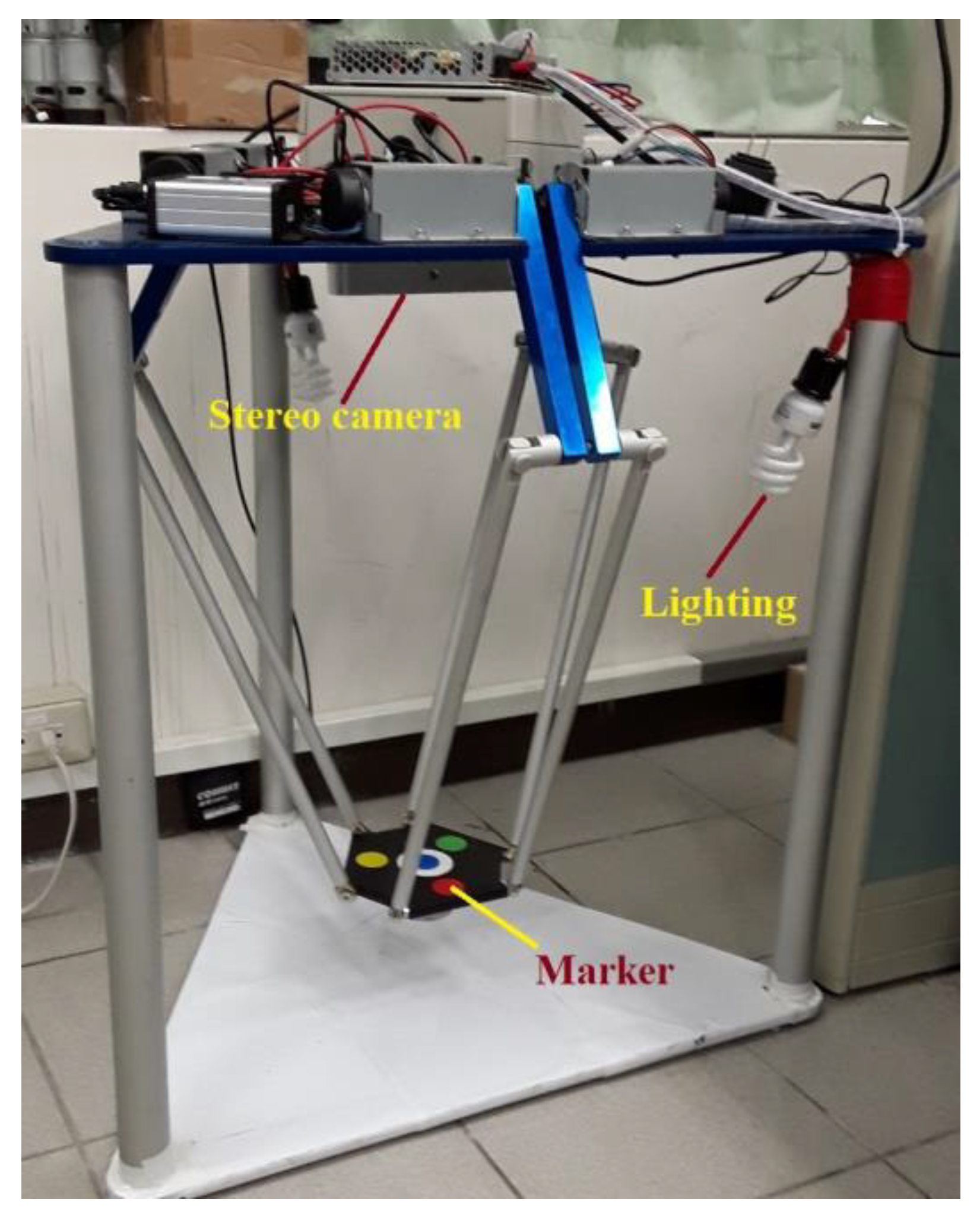
- Although there are many studies of hybrid control in the literature, it is not often mentioned in applications of Hexa robots due to difficulty in control related to the complex structure of parallel manipulators. In this paper, a vision/position hybrid controller for Hexa parallel robot has been proposed. The 3DVS is combined with the PID position controller to form a two-level closed-loop controller of the robot. The 3DVS is designed with a simple structure consisting of one stereo camera at the top of the robot and four planar colored markers on the surface of the end-effector. Based on the colored markers, the 3DVS measures the pose of the end-effector after the PID control. The measurement of the 3DVS is used as a feedback of the second closed-loop control, which ensures achieving the desired trajectory of the robot.
- Based on the distance and coplanarity constraints of the colored markers, the optimization problem is modeled to minimize the measurement error of the 3DVS due to the error of camera parameters and the external noise affecting image processing. This is the real-time adjustment, which is implemented right in the operation of the robot to self-correct errors and adapt to environmental impacts.
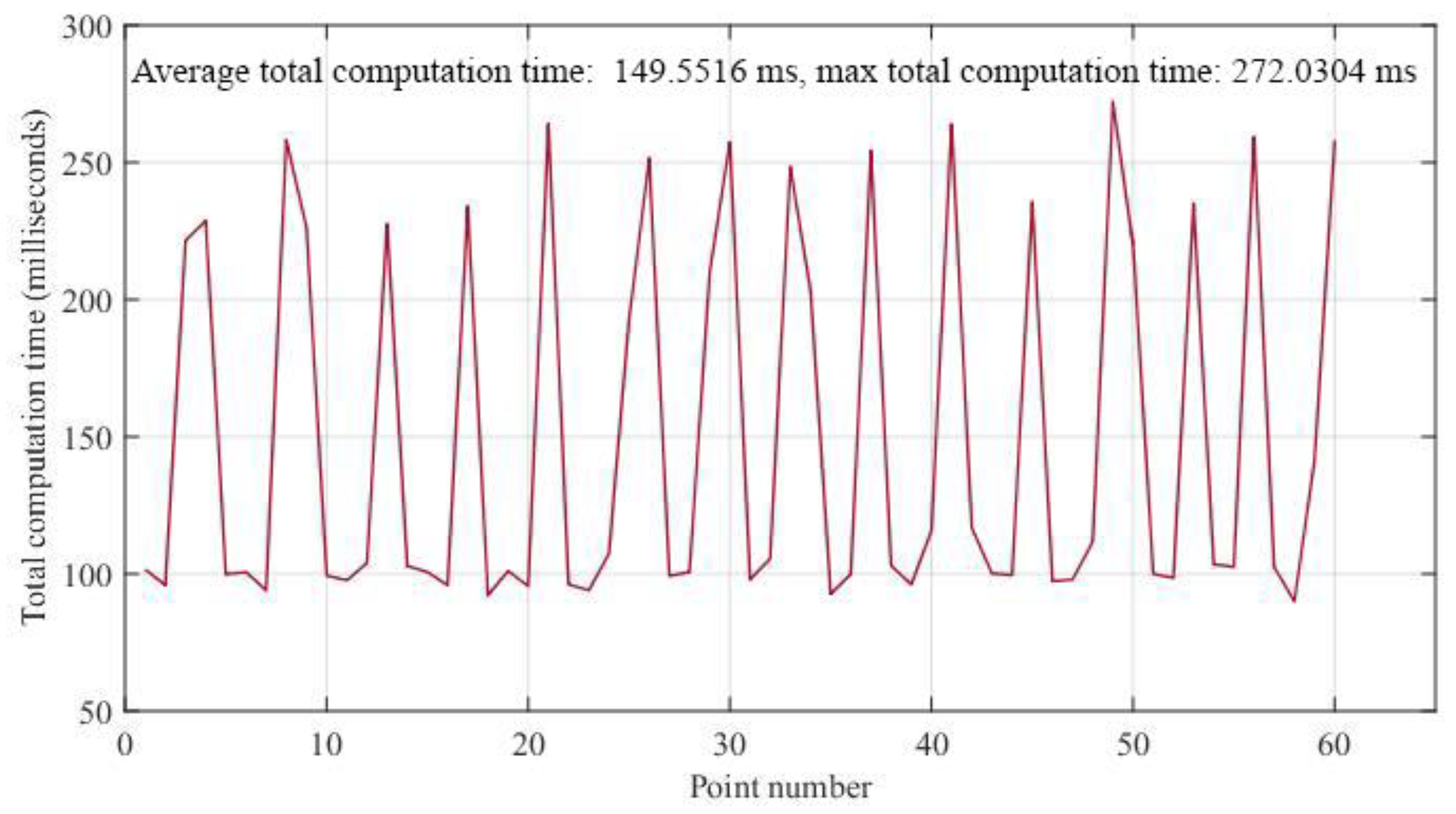
- The BFO algorithm is appropriately configured to solve the optimization problem of the real-time adjustment process. The experimental results show that it has high accuracy and fast computation time although the experiment is conducted on a laptop with an average hardware configuration.
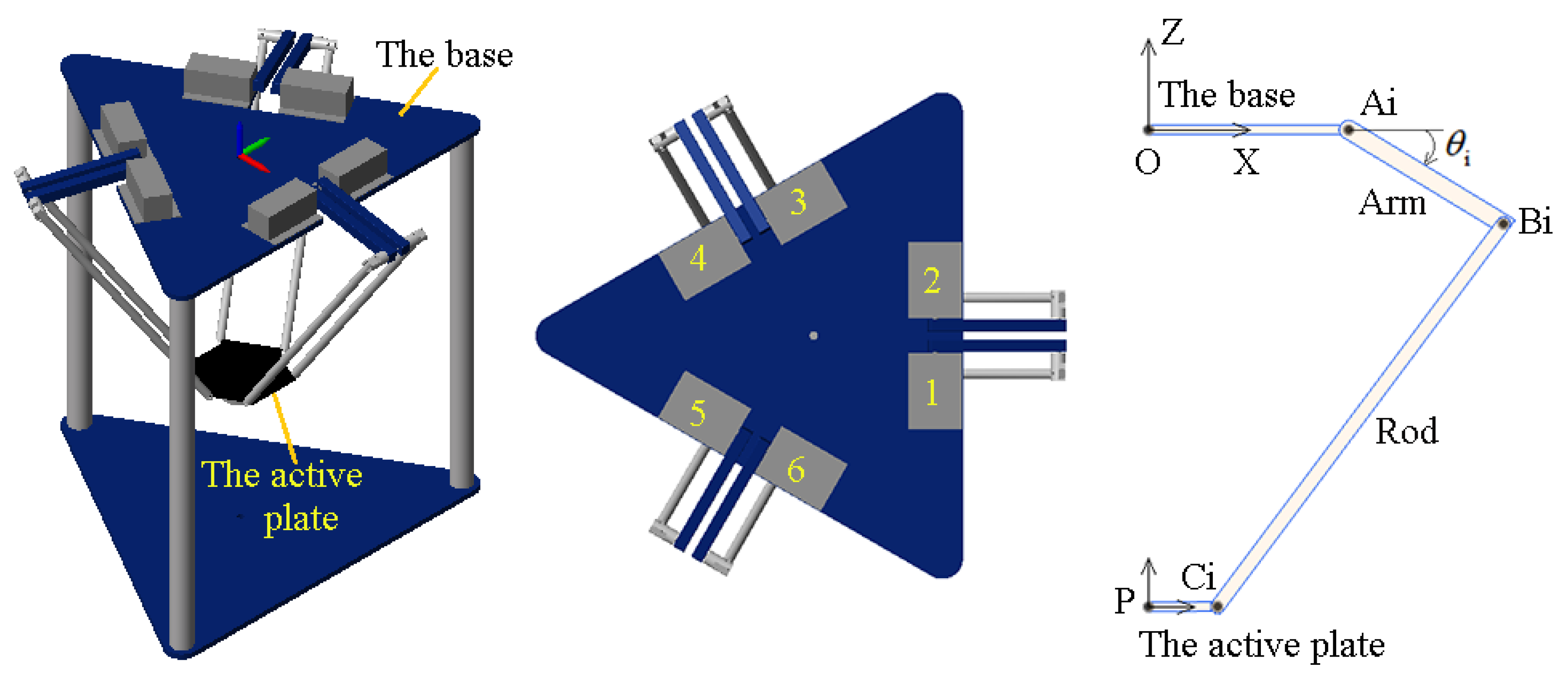
2. System Description
- Dynamics are ignored in the system, so inertia and gravity affect positioning accuracy.
- The gearbox backlash and the mechanical vibration of the system also affect the accuracy.
- Slippage of the position of actuators due to the dynamics coupling effect between the links.
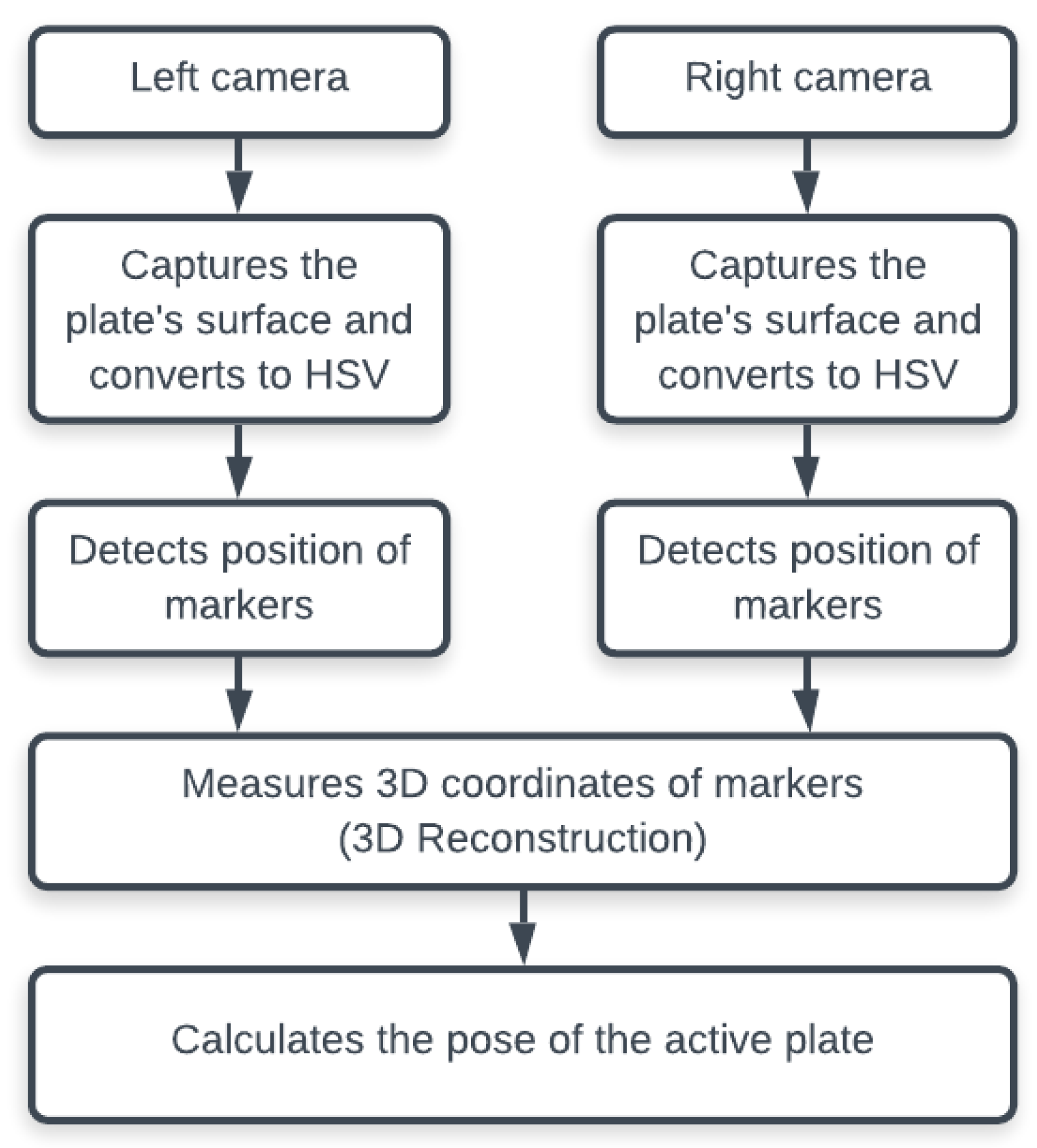
3. The 3D Vision System
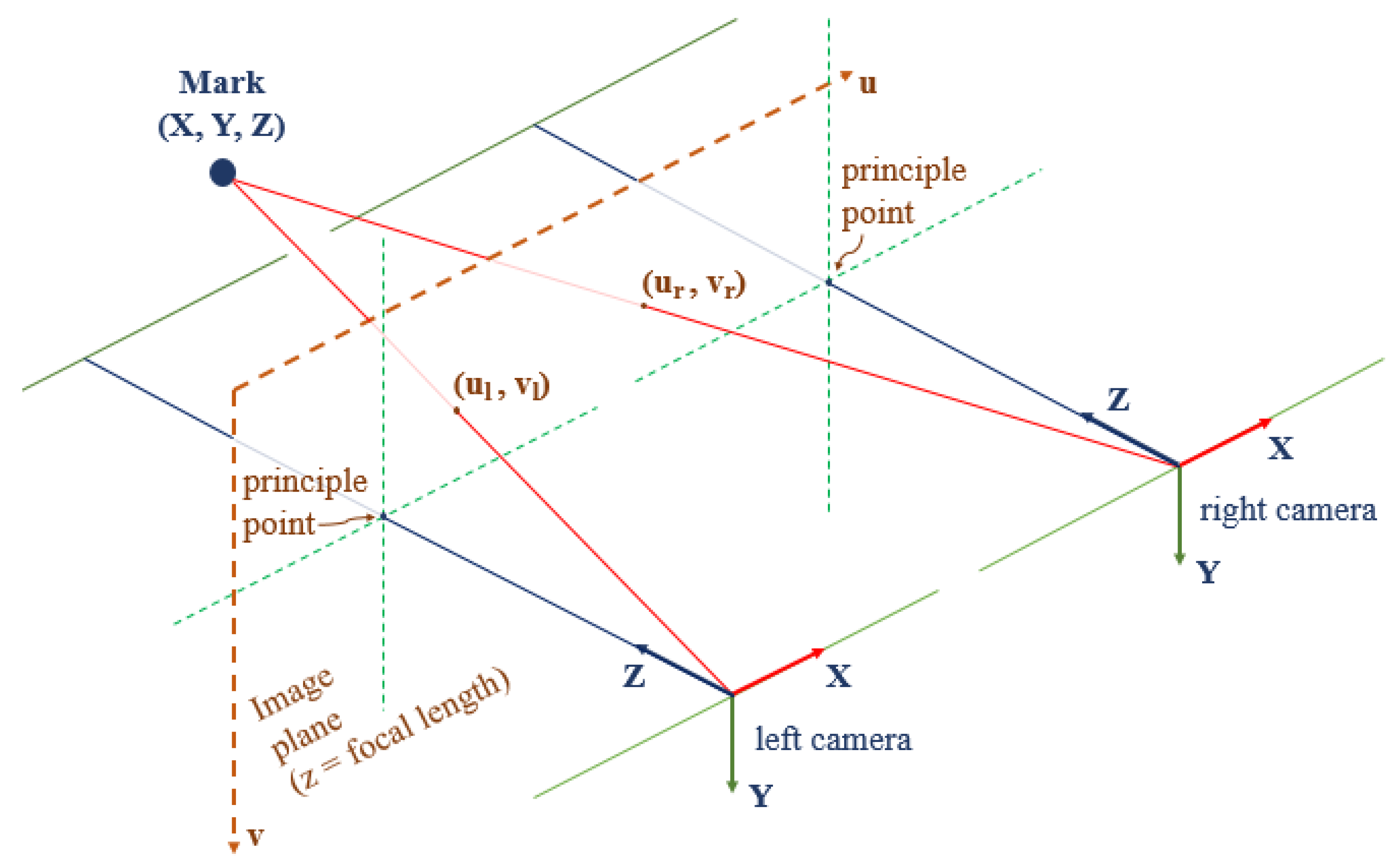
3.1. The 3D Reconstruction of the Stereo Camera
3.2. The Constraints of the Colored Markers
- Distance constraints: the distances from the red, yellow, and green markers to the blue mark are known constants.
- Coplanarity constraint: four colored markers are on the surface of the plate, so their central points must be on the same plane.
3.2.1. Distance Constraints
3.2.2. Coplanarity Constraints
4. Real-time Adjustment Using BFO
4.1. The Optimization Problem
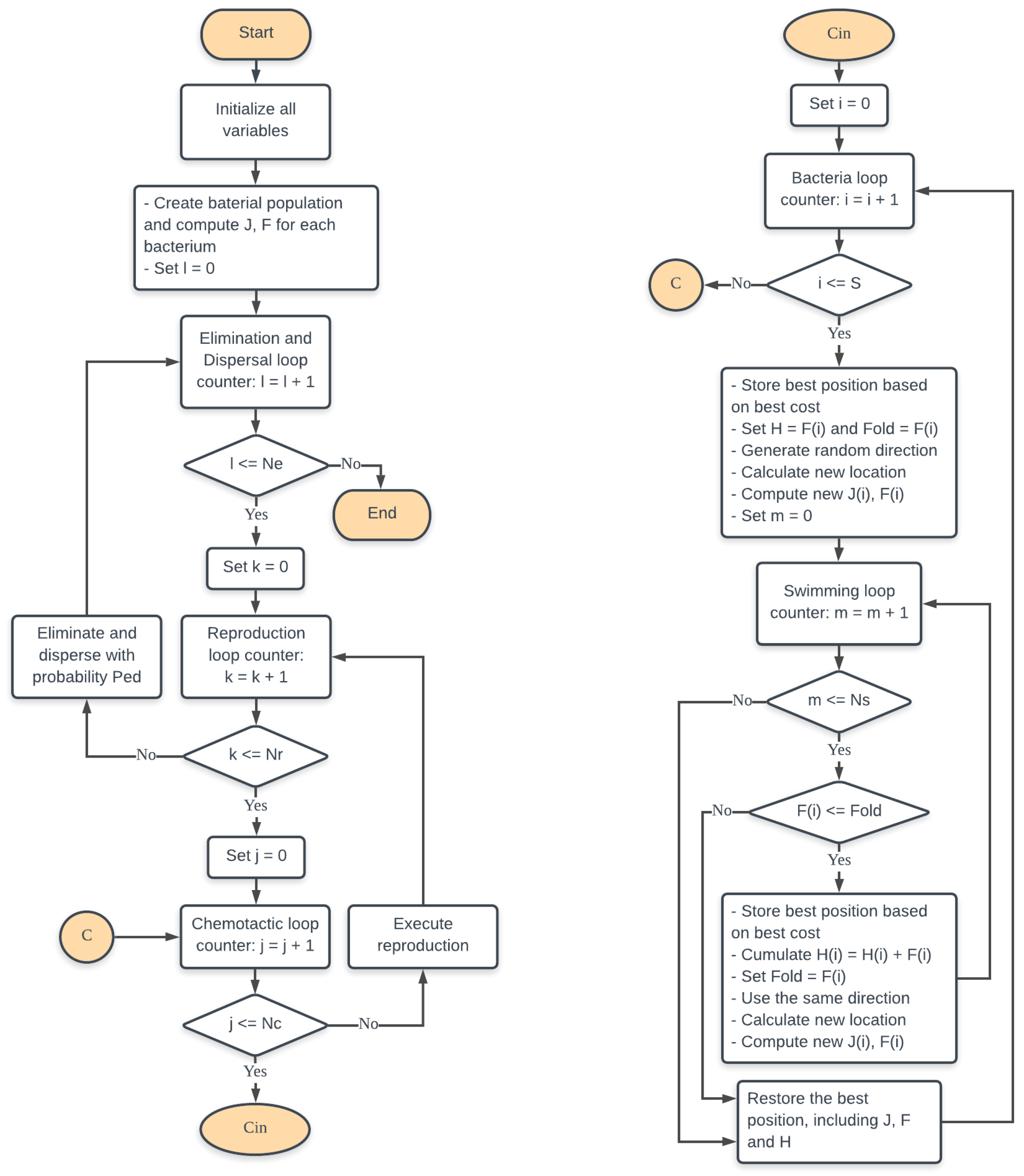
4.2. Introduction to BFO
4.3. Applying BFO for Real-time Adjustment
4.3.1. Initialization
4.3.2. Chemotaxis
4.3.3. Reproduction
4.3.4. Elimination and Dispersal
4.3.5. The Finish
5. The Pose of the Active Plate
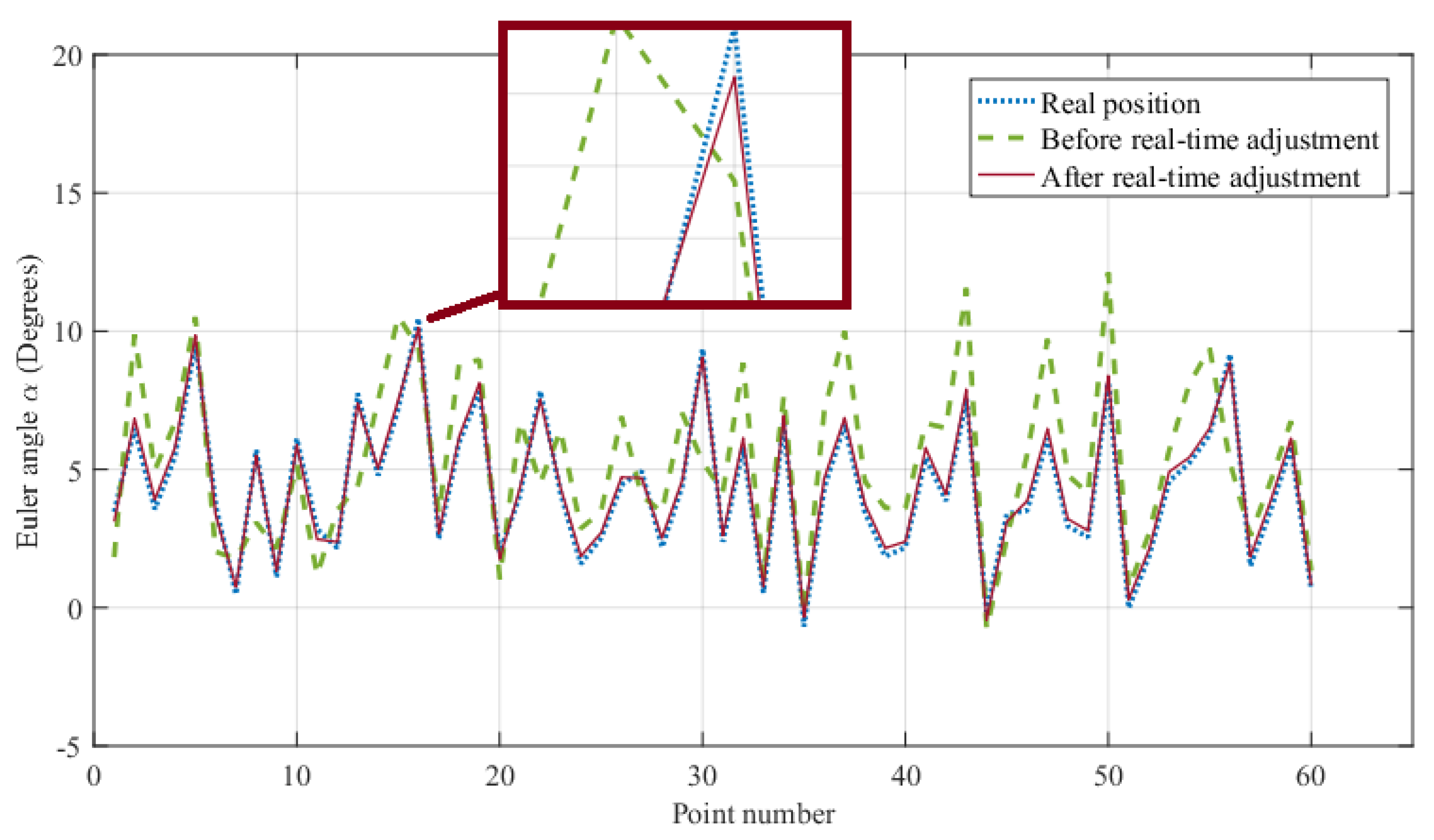
- The angle (rotation around the z-axis): is the angle between the x-axis and the line passing through the blue and red markers.
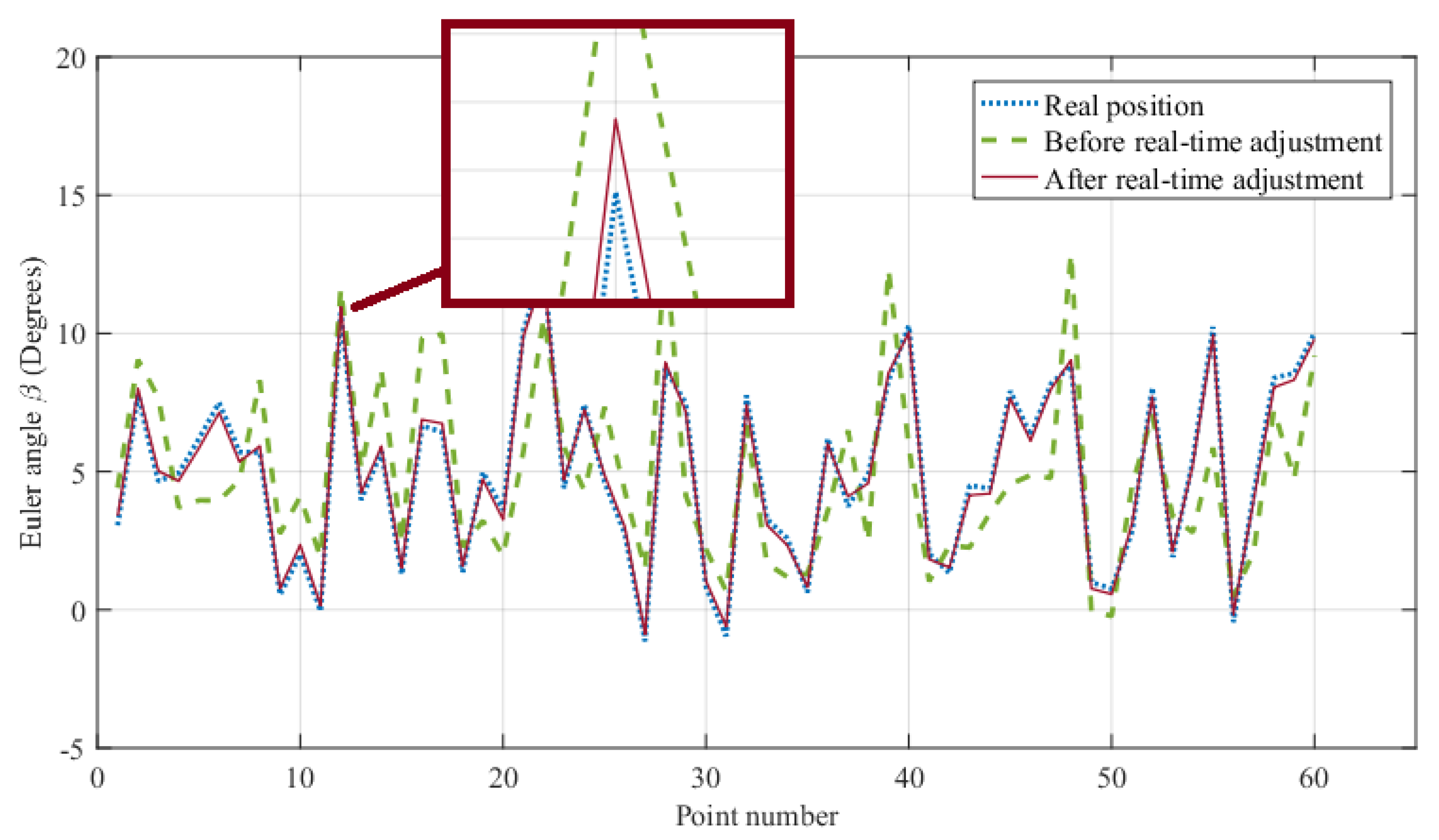
- The angle (rotation around the y-axis): is the angle between the plane and the OYZ-plane, where the OYZ-plane has an equation of the form . The plane is described by (7).
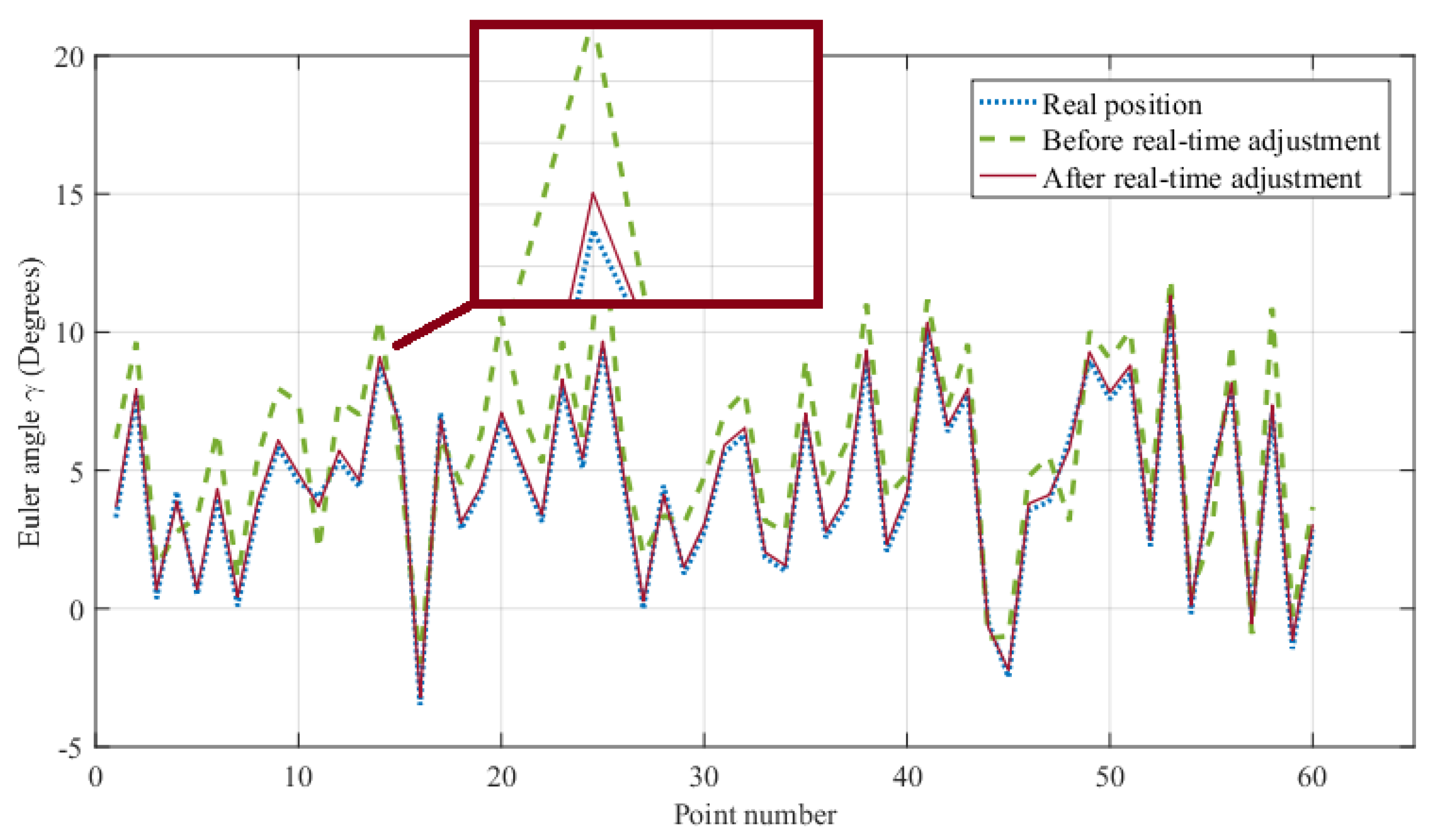
- The angle (rotation around the x-axis): is the angle between the plane and the OXZ-plane, where the OXZ-plane has an equation of form .
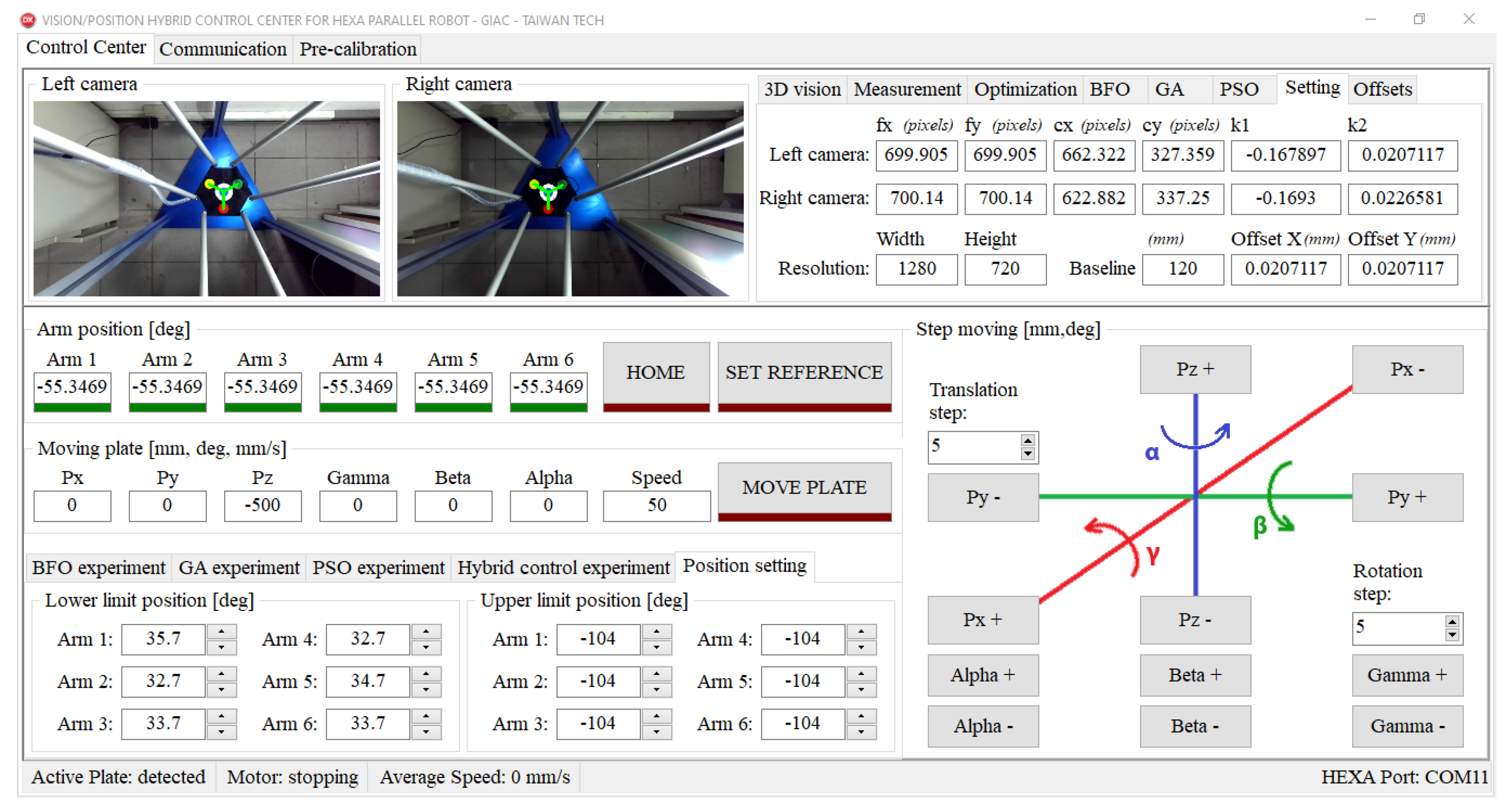
6. Experimental Setup
6.1. Experimental Configuration Parameters
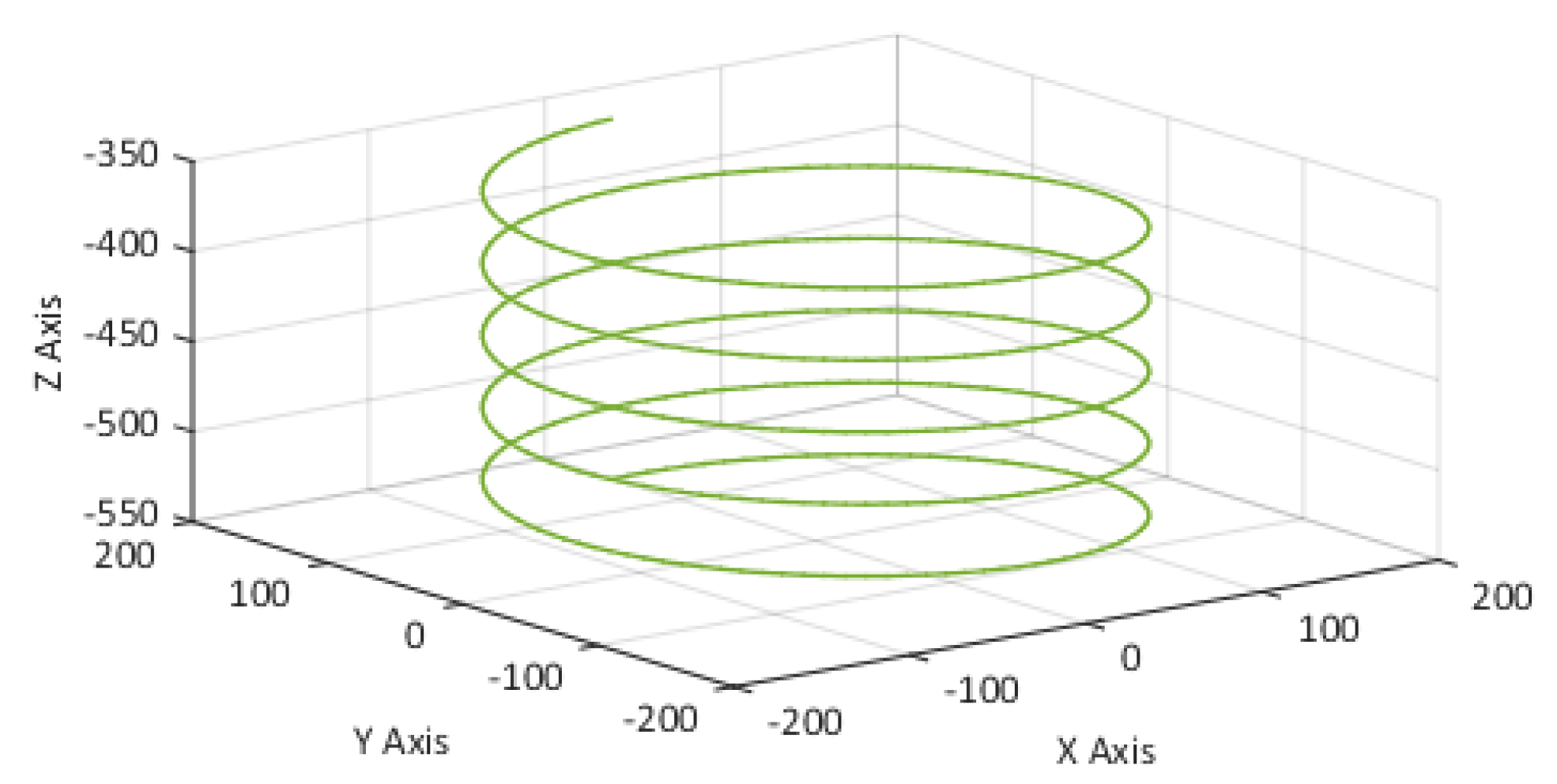
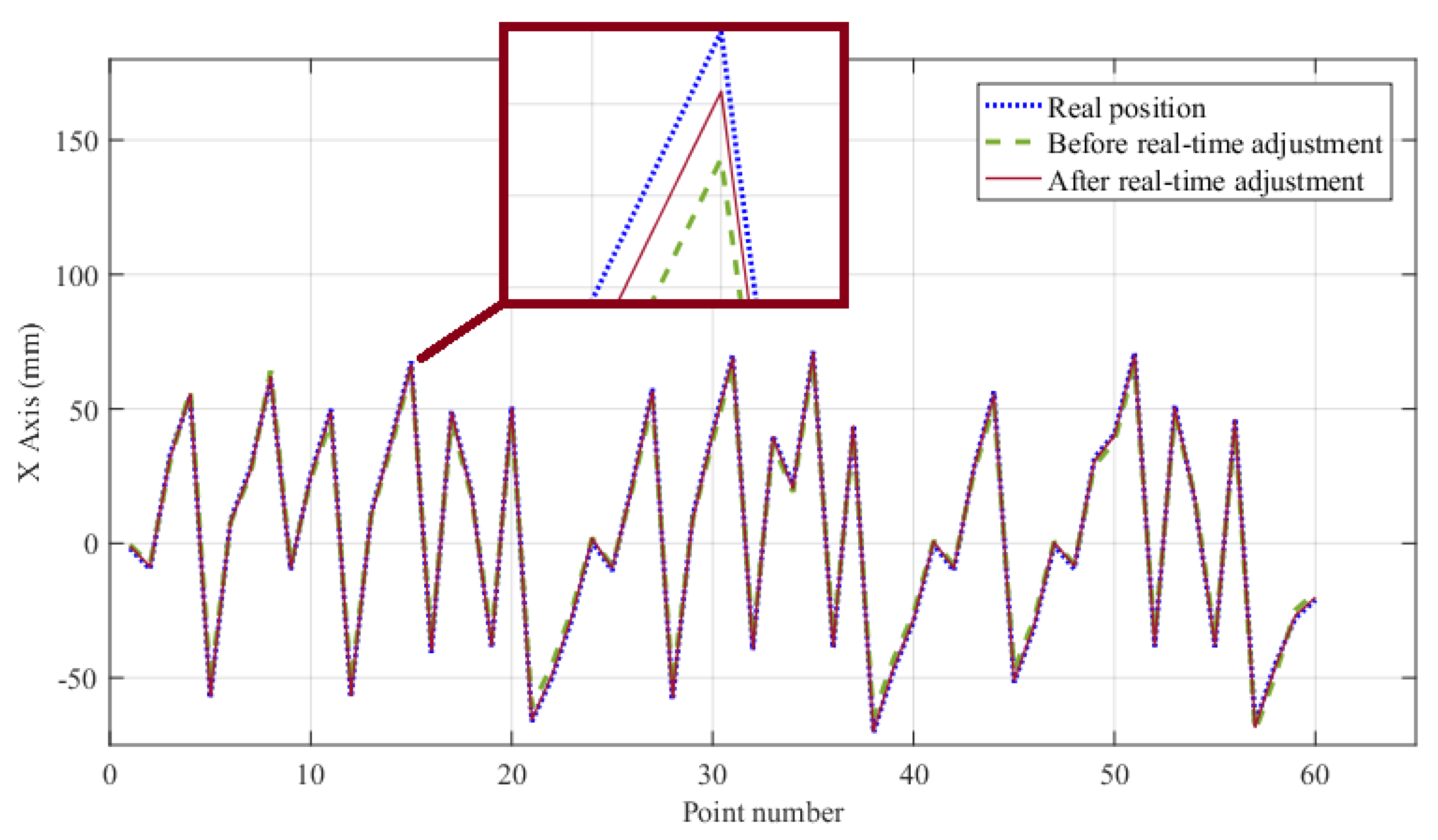
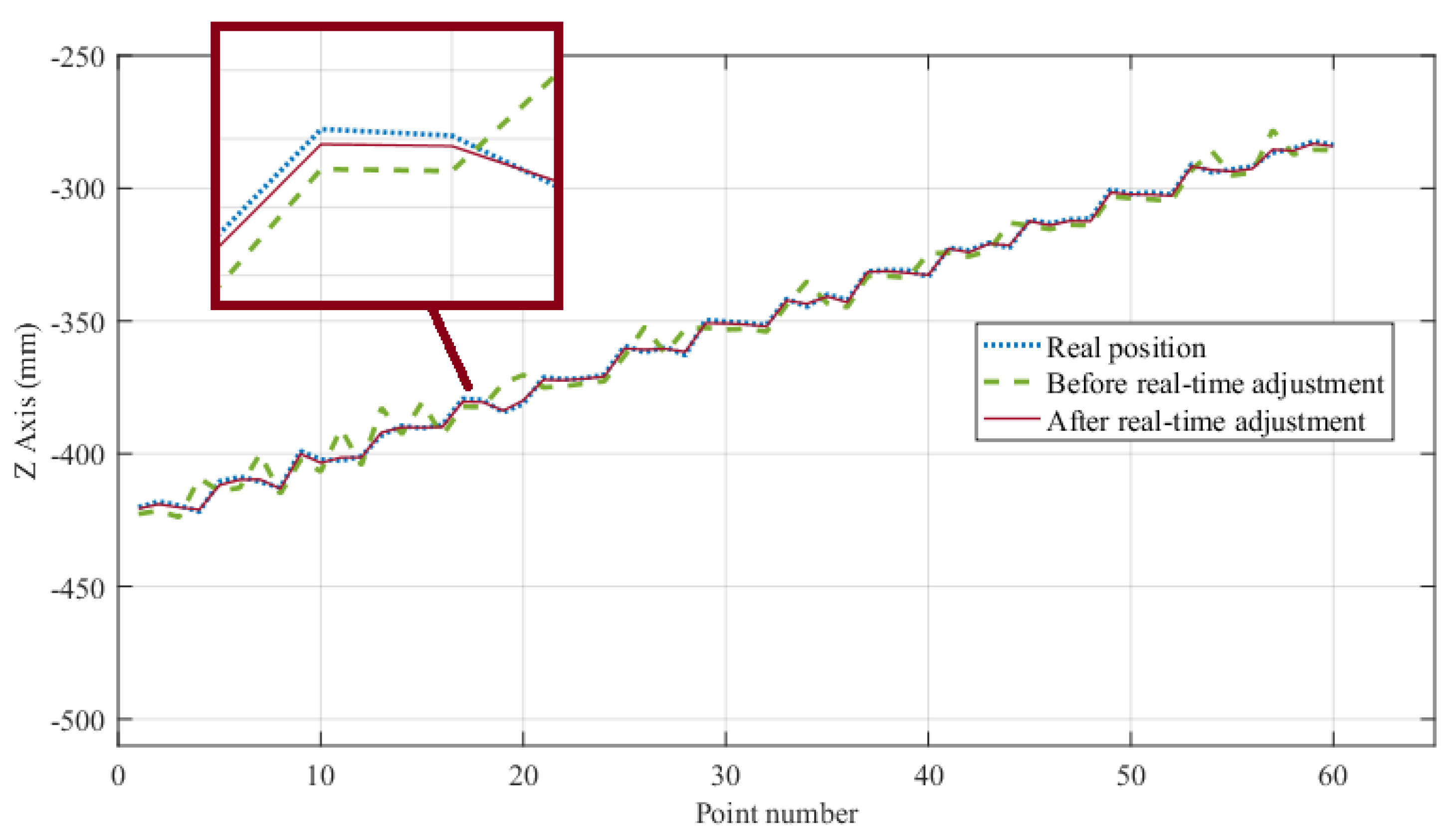
6.2. Validation of the Proposed Method
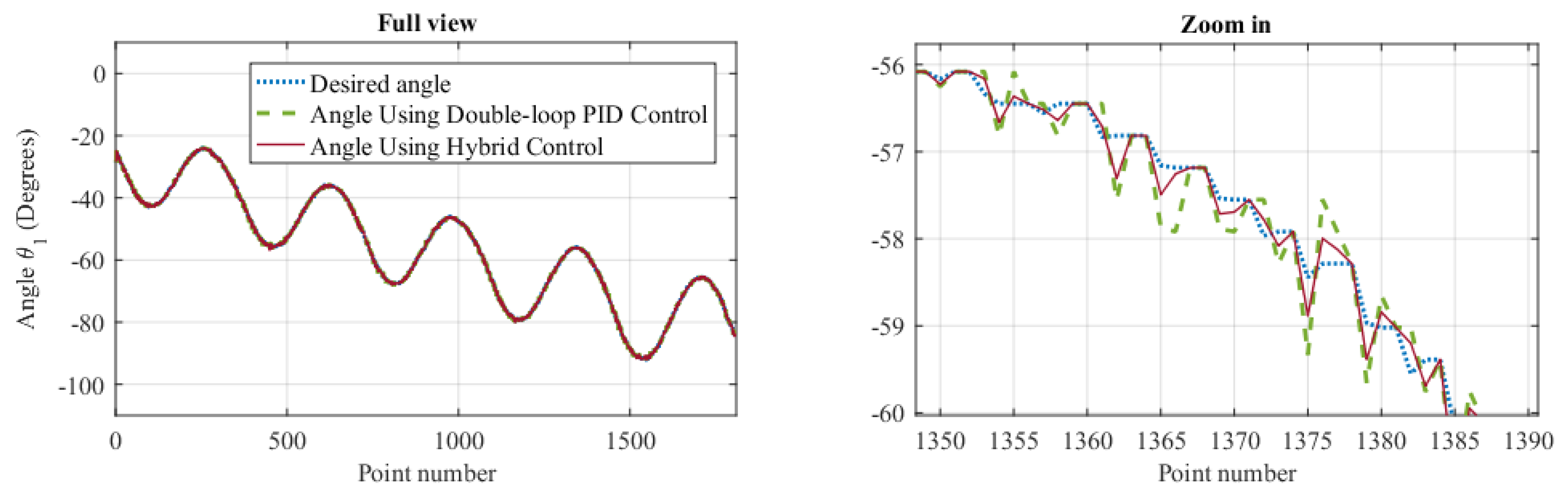
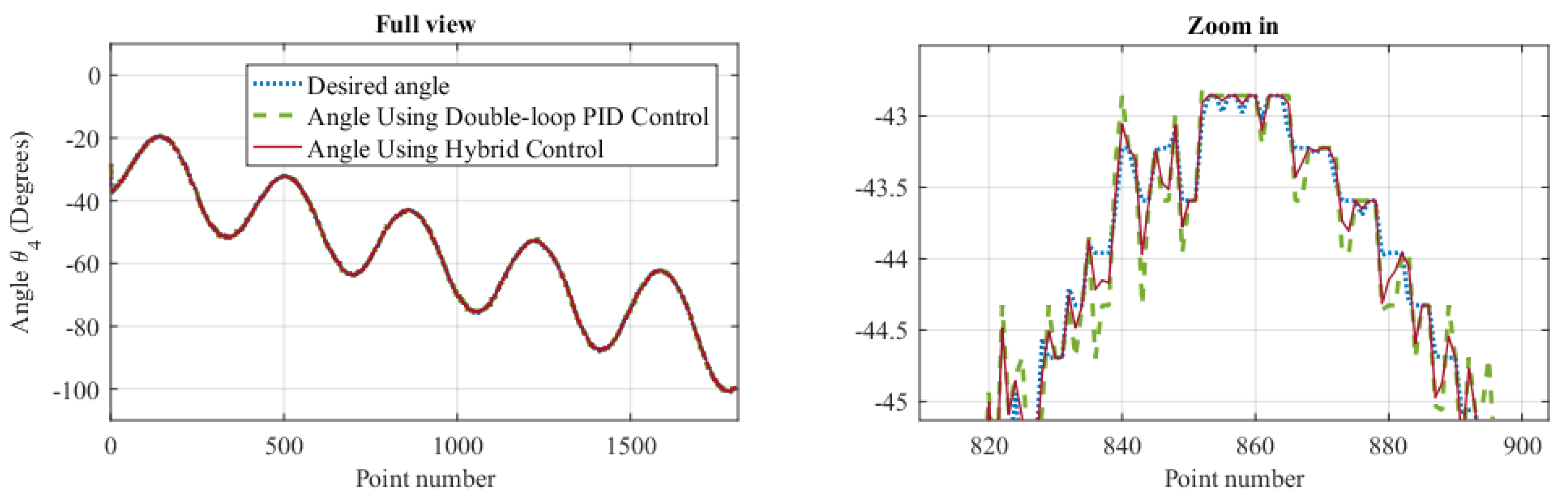
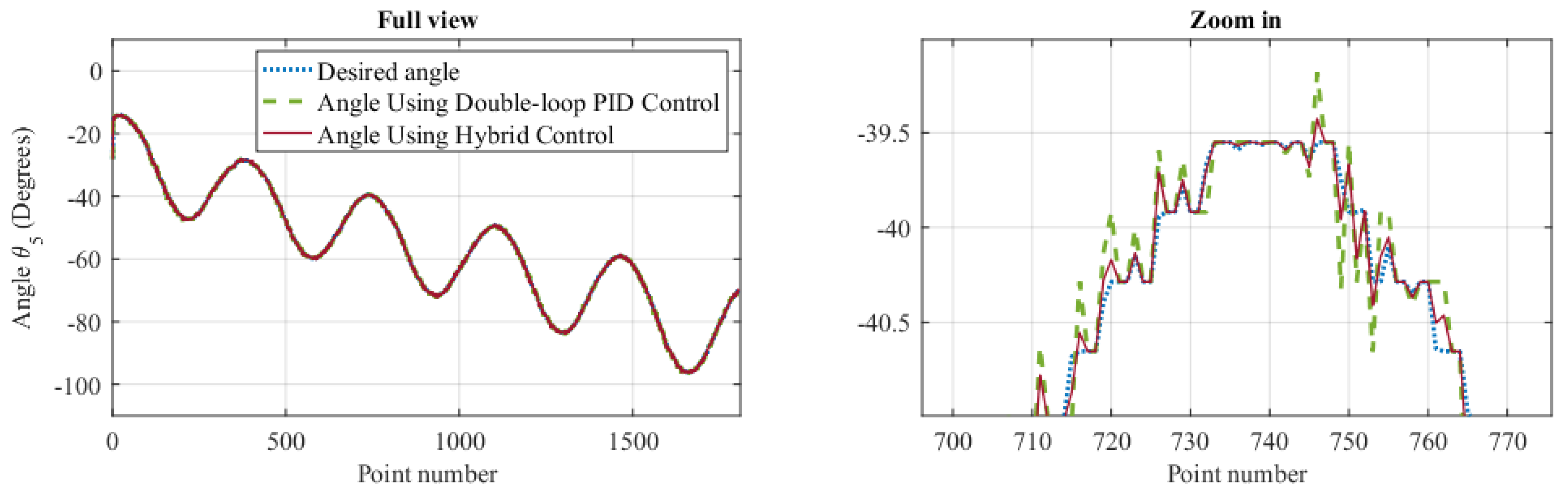
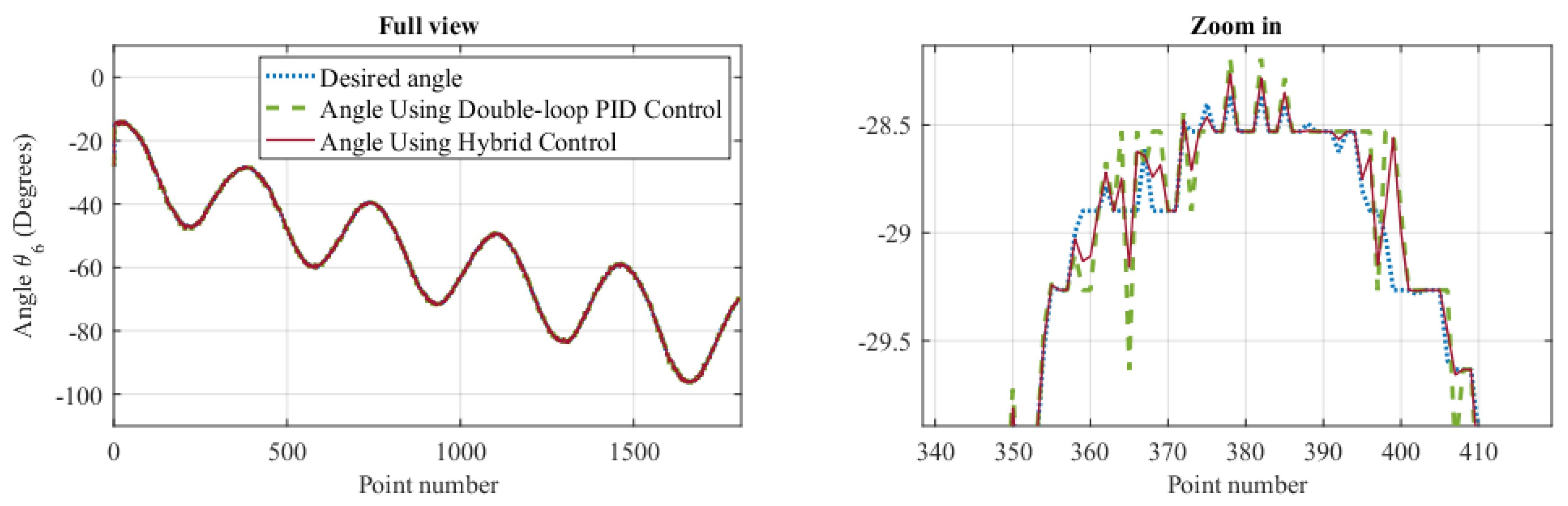
6.3. The Comparison
7. The Discussion of Experimental Results
7.1. Validation Result
7.2. Comparison Result
8. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Stewart, D. A platform with six degrees of freedom. Proc. Inst. Mech. Eng. 1965, 180, 371–386. [Google Scholar] [CrossRef]
- Merlet, J.-P. Parallel Robots, 2nd ed.; Springer: Dordrecht, The Netherlands, 2006. [Google Scholar]
- Pierrot, F.; Dauchez, P.; Fournier, A. Hexa: A fast six-DOF fully parallel robot. In Proceedings of the Fifth International Conference on Advanced Robotics, Pisa, Italy, 19–22 June 1991; pp. 1158–1163. [Google Scholar]
- Uchiyama, M. A 6 d.o.f parallel robot HEXA. Adv. Robot. 1994, 8, 601. [Google Scholar] [CrossRef]
- Wang, X.; Tian, Y. Inverse dynamics of hexa parallel robot based on the lagrangian equations of first type. In Proceedings of the International Conference on Mechanic Automation and Control Engineering, Wuhan, China, 26–28 June 2010; pp. 3712–3716. [Google Scholar]
- Filho, S.-T.; Cabral, E. Kinematics and workspace analysis of a parallel architecture robot: The hexa. In Proceedings of the ABCM Symposium Series in Mechatronics, Ouro Preto, Minas Gerais, Brasil, 6–11 November 2005; pp. 158–165. [Google Scholar]
- Dehghani, M.; Ahmadi, M.; Khayatian, A.; Eghtesad, M.; Farid, M. Neural network solution for forward kinematics problem of hexa parallel robot. In Proceedings of the American Control Conference, Seattle, WA, USA, 11–13 June 2008; pp. 4214–4219. [Google Scholar]
- De Queiroz, E.-M.; Bier, C.-C.; Campos, A.; Maass, J.; Guenther, R. Direct singularity avoidance strategy for the hexa parallel robot. In Proceedings of the ABCM Symposium Series in Mechatronics, Ouro Preto, Minas Gerais, Brasil, 6–11 November 2005; pp. 182–189. [Google Scholar]
- Ribeiro, R.; Hsu, L.; Costa, R.; Lizarralde, F. Passivity-based cascade hybrid pose/force robot control. In Proceedings of the 2019 IEEE 15th International Conference on Automation Science and Engineering (CASE), Vancouver, BC, Canada, 22–26 August 2019; pp. 806–811. [Google Scholar]
- Ferretti, G.; Magnani, G.; Rocco, P. Toward the implementation of hybrid position/force control in industrial robots. IEEE Trans. Robot. Autom. 1997, 13, 838–845. [Google Scholar] [CrossRef]
- Raibert, M.-H.; Craig, J.-J. Hybrid position/force control of manipulators. J. Dyn. Syst. Meas. Control 1981, 103, 126–133. [Google Scholar] [CrossRef]
- Chen, B.-H.; Wang, Y.-H.; Lin, P.-C. A hybrid control strategy for dual-arm object manipulation using fused force/position errors and iterative learning. In Proceedings of the 2018 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Auckland, New Zealand, 9–12 July 2018; pp. 39–44. [Google Scholar]
- Craig, J.-J.; Raibert, M.-H. A systematic method of hybrid position/force control of a manipulator. In Proceedings of the COMPSAC 79. Proceedings. Computer Software and The IEEE Computer Society’s Third International Applications Conference, Chicago, IL, USA, 6–8 November 1979; pp. 446–451. [Google Scholar]
- Fisher, W.-D.; Mujtaba, M.-S. Hybrid position/force control: A correct formulation. Int. J. Robot. Res. 1992, 11, 299–311. [Google Scholar] [CrossRef]
- Huynh, B.-P.; Wu, C.-W.; Kuo, Y.-L. Force/Position hybrid control for a hexa robot using gradient descent iterative learning control algorithm. IEEE Access 2019, 7, 72329–72342. [Google Scholar] [CrossRef]
- Özgür, E.; Dahmouche, R.; Andreff, N.; Martinet, P. A vision-based generic dynamic model of PKMs and its experimental validation on the quattro parallel robot. In Proceedings of the IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Besacon, France, 8–11 July 2014; pp. 937–942. [Google Scholar]
- Liu, Z.; Wang, F.; Zhang, Y. Adaptive visual tracking control for manipulator with actuator fuzzy dead-zone constraint and unmodeled dynamic. IEEE Trans. Syst. ManCybern. Syst. 2015, 45, 1301–1312. [Google Scholar] [CrossRef]
- Mei, B.; Zhu, W.; Yuan, K.; Ke, Y. Robot base frame calibration with a 2D vision system for mobile robotic drilling. Int. J. Adv. Manuf. Technol. 2015, 80, 1903–1917. [Google Scholar] [CrossRef]
- Du, J.; Mouser, C.; Sheng, W. Design and evaluation of a teleoperated robotic 3-d mapping system using an rgb-d sensor. IEEE Trans. Syst. Man Cybern. Syst. 2016, 46, 718–724. [Google Scholar] [CrossRef]
- Ke, F.; Li, Z.; Xiao, H.; Zhang, X. Visual servoing of constrained mobile robots based on model predictive control. IEEE Trans. Syst. Man Cybern. Syst. 2017, 47, 1428–1438. [Google Scholar] [CrossRef]
- Fang, Z.; Weng, W.; Wang, W.; Zhang, C.; Yang, G. A vision-based robotic laser welding system for insulated mugs with fuzzy seam tracking control. Symmetry 2019, 11, 1385. [Google Scholar] [CrossRef] [Green Version]
- Liang, C.-J.; Lundeena, K.-M.; McGeeb, W.; Menassaa, C.-C.; Leea, S.-H.; Kamat, V.-R. A vision-based marker-less pose estimation system for articulated construction robots. Autom. Constr. 2019, 104, 80–94. [Google Scholar] [CrossRef]
- Sun, P.; Lu, N.-G.; Dong, M.-L.; Yan, B.-X.; Wang, J. Simultaneous all-parameters calibration and assessment of a stereo camera pair using a scale bar. Sensors 2018, 18, 3964. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhang, X.; Song, Y.; Yang, Y.; Pan, H. Stereo vision based autonomous robot calibration. Robot. Auton. Syst. 2017, 93, 43–51. [Google Scholar] [CrossRef]
- Idrobo-Pizo, G.-A.; Motta, J.-M.-S.-T.; Sampaio, R.-C. A Calibration method for a laser triangulation scanner mounted on a robot arm for surface mapping. Sensors 2019, 19, 1783. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ding, Y.; Chen, L.; Hao, K. Bio-Inspired Collaborative Intelligent Control and Optimization; Springer Nature: Singapore, 2018. [Google Scholar]
- Ni, J.; Wu, L.; Fan, X.; Yang, S.-X. Bioinspired intelligent algorithm and its applications for mobile robot control: A survey. Comput. Intell. Neurosci. 2016, 2016, 1–16. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zeng, N.; Zhang, H.; Chen, Y.; Chen, B. Path planning for intelligent robot based on switching local evolutionary PSO algorithm. Assem. Autom. 2015, 36, 120–126. [Google Scholar] [CrossRef]
- Wang, B.; Li, S.; Guo, J.; Chen, Q.-W. Car-like mobile robot path planning in rough terrain using multi-objective particle swarm optimization algorithm. Neurocomputing 2018, 282, 42–51. [Google Scholar] [CrossRef]
- Zhang, G.; Jia, S.; Zeng, D.; Zheng, Z. object detection and grabbing based on machine vision for service robot. In Proceedings of the IEEE 9th Annual Information Technology, Electronics and Mobile Communication Conference (IEMCON), Vancouver, BC, Canada, 1–3 November 2018; pp. 89–94. [Google Scholar]
- Farag, R.-M.-A.; Saad, M.-S.; Emara, H.; Bahgat, A. Three-dimensional localization of known objects for robot arm application based on a particle swarm optimized low end stereo vision system. In Proceedings of the IECON 2018 -44th Annual Conference of the IEEE Industrial Electronics Society, Washington, DC, USA, 21–23 October 2018; pp. 2736–2741. [Google Scholar]
- Passino, K.-M. Biomimicry of bacterial foraging for distributed optimization. IEEE Control Syst. Mag. 2002, 22, 52–67. [Google Scholar]
- OpenCV.org. Available online: https://docs.opencv.org/ (accessed on 16 January 2020).




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Error | Before Real-Time Adjustment | After Real-Time Adjustment Using BFO | ||||
| X | Y | Z | X | Y | Z | |
| MAE | 3.15805 | 3.47503 | 4.45033 | 0.89908 | 0.93045 | 0.77919 |
| MSE | 11.42375 | 13.96472 | 30.04942 | 0.85175 | 0.90952 | 0.69280 |
| NRMSE | 0.02447 | 0.02885 | 0.03758 | 0.00657 | 0.00686 | 0.00604 |
| Error | Before Real-Time Adjustment | After Real-Time Adjustment Using BFO | ||||
| α | β | γ | α | β | γ | |
| MAE | 1.88882 | 2.13933 | 1.76775 | 0.28015 | 0.25887 | 0.27514 |
| MSE | 4.65455 | 5.79043 | 3.72159 | 0.08151 | 0.07025 | 0.07843 |
| NRMSE | 0.16745 | 0.17822 | 0.12105 | 0.02704 | 0.02034 | 0.01929 |
| θ | MSE | MAE (Degrees) | NRMSE | |||
|---|---|---|---|---|---|---|
| Double-Loop PID | Proposed Method | Double-Loop PID | Proposed Method | Double-Loop PID | Proposed Method | |
| 1 | 0.24507 | 0.07827 | 0.33689 | 0.16484 | 0.00728 | 0.00413 |
| 2 | 0.22764 | 0.07742 | 0.33918 | 0.17136 | 0.00698 | 0.00408 |
| 3 | 0.23438 | 0.08534 | 0.33019 | 0.17191 | 0.00594 | 0.00358 |
| 4 | 0.22605 | 0.07466 | 0.33611 | 0.16810 | 0.00583 | 0.00335 |
| 5 | 0.23187 | 0.07403 | 0.33084 | 0.16179 | 0.00585 | 0.00331 |
| 6 | 0.22733 | 0.07490 | 0.34077 | 0.16926 | 0.00577 | 0.00332 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huynh, B.-P.; Su, S.-F.; Kuo, Y.-L. Vision/Position Hybrid Control for a Hexa Robot Using Bacterial Foraging Optimization in Real-time Pose Adjustment. Symmetry 2020, 12, 564. https://doi.org/10.3390/sym12040564
Huynh B-P, Su S-F, Kuo Y-L. Vision/Position Hybrid Control for a Hexa Robot Using Bacterial Foraging Optimization in Real-time Pose Adjustment. Symmetry. 2020; 12(4):564. https://doi.org/10.3390/sym12040564
Chicago/Turabian StyleHuynh, Ba-Phuc, Shun-Feng Su, and Yong-Lin Kuo. 2020. "Vision/Position Hybrid Control for a Hexa Robot Using Bacterial Foraging Optimization in Real-time Pose Adjustment" Symmetry 12, no. 4: 564. https://doi.org/10.3390/sym12040564
APA StyleHuynh, B.-P., Su, S.-F., & Kuo, Y.-L. (2020). Vision/Position Hybrid Control for a Hexa Robot Using Bacterial Foraging Optimization in Real-time Pose Adjustment. Symmetry, 12(4), 564. https://doi.org/10.3390/sym12040564