Risk Assessment of Seaplane Operation Safety Using Bayesian Network

Abstract
:1. Introduction
2. Research Methodology
2.1. Statistical Analysis
2.2. Expert Interview
2.3. Delphi Method
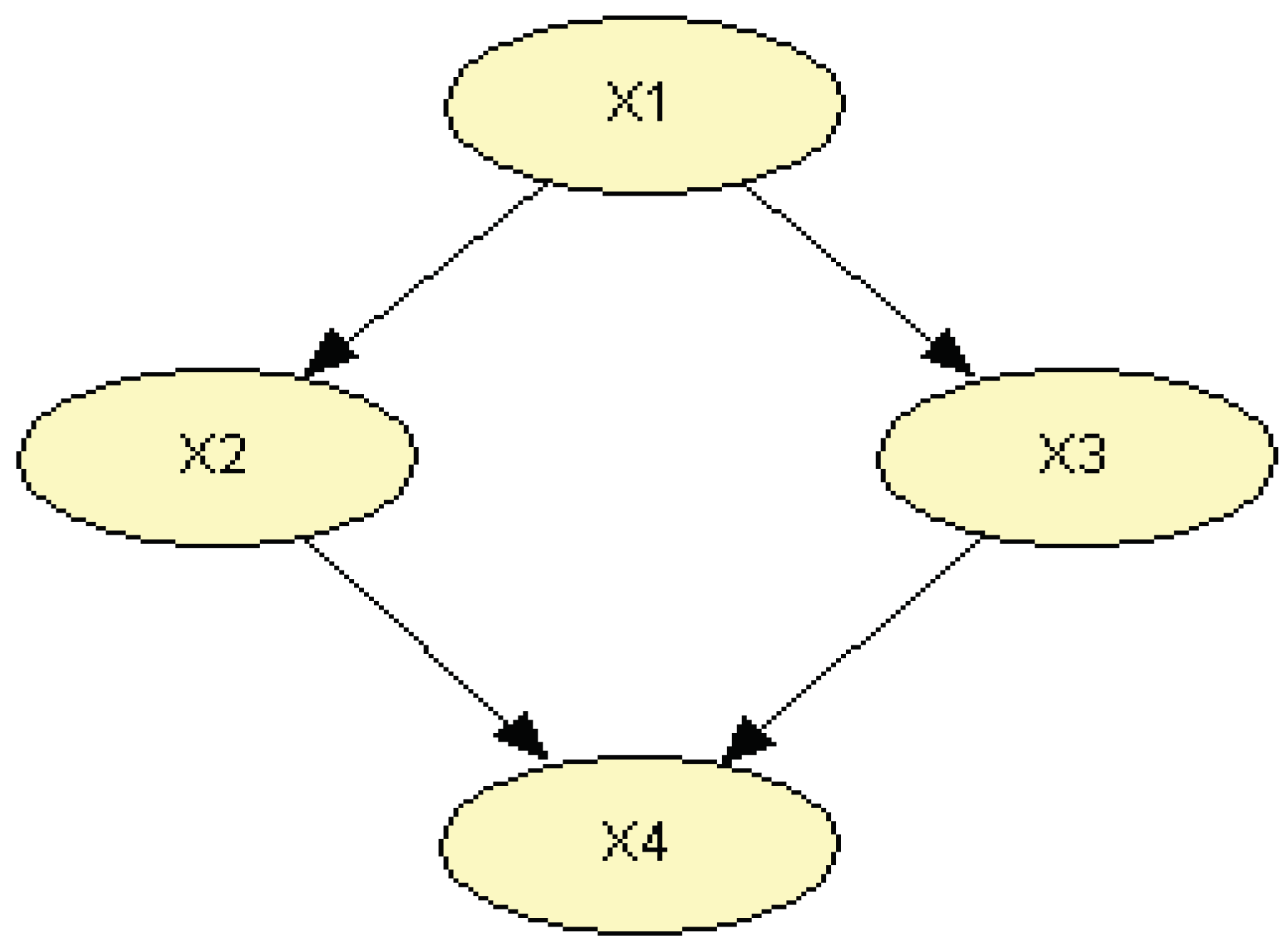
2.4. Bayesian Network
3. Proposed Approach for Seaplane Operation Safety Risk Modeling
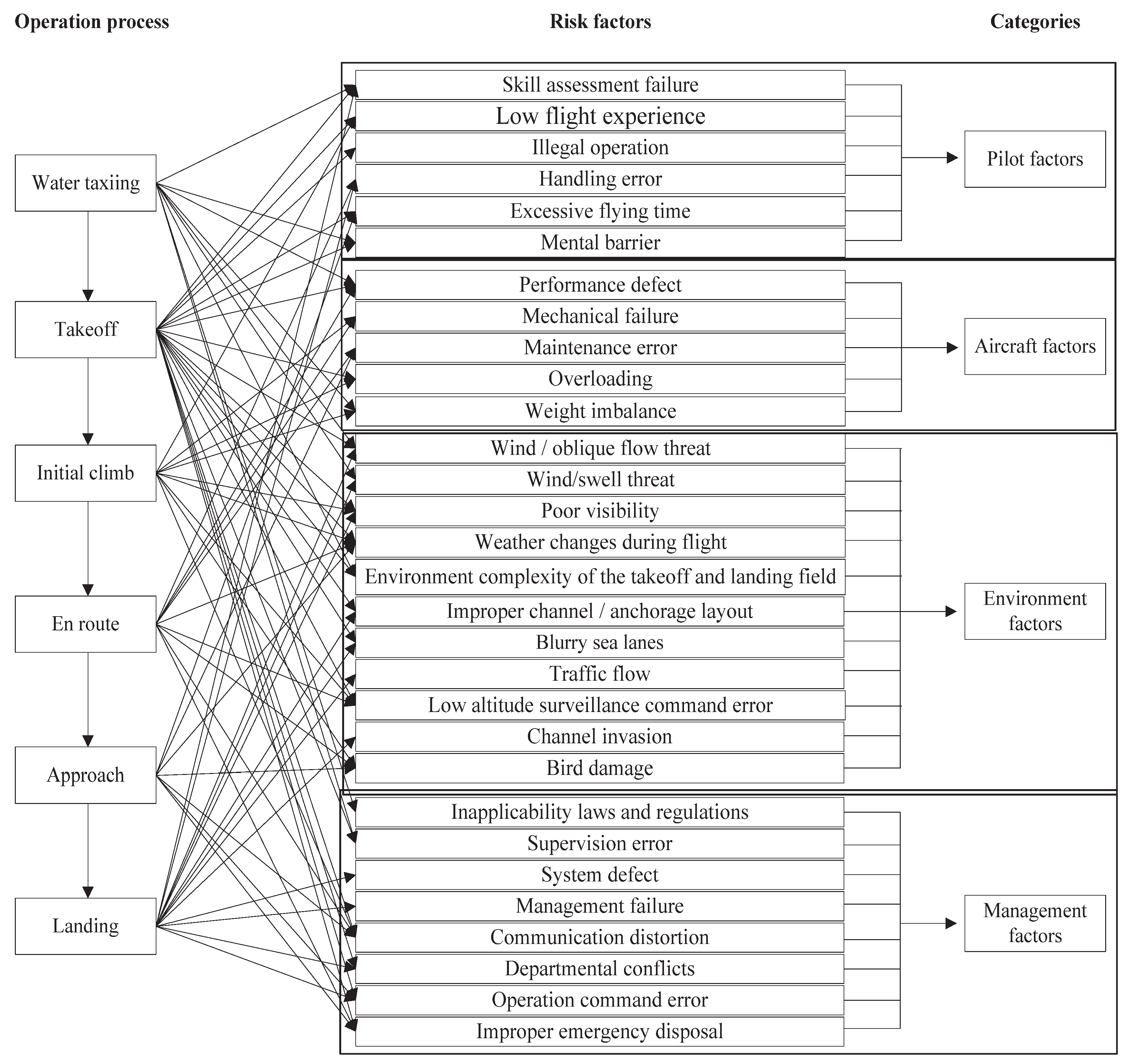
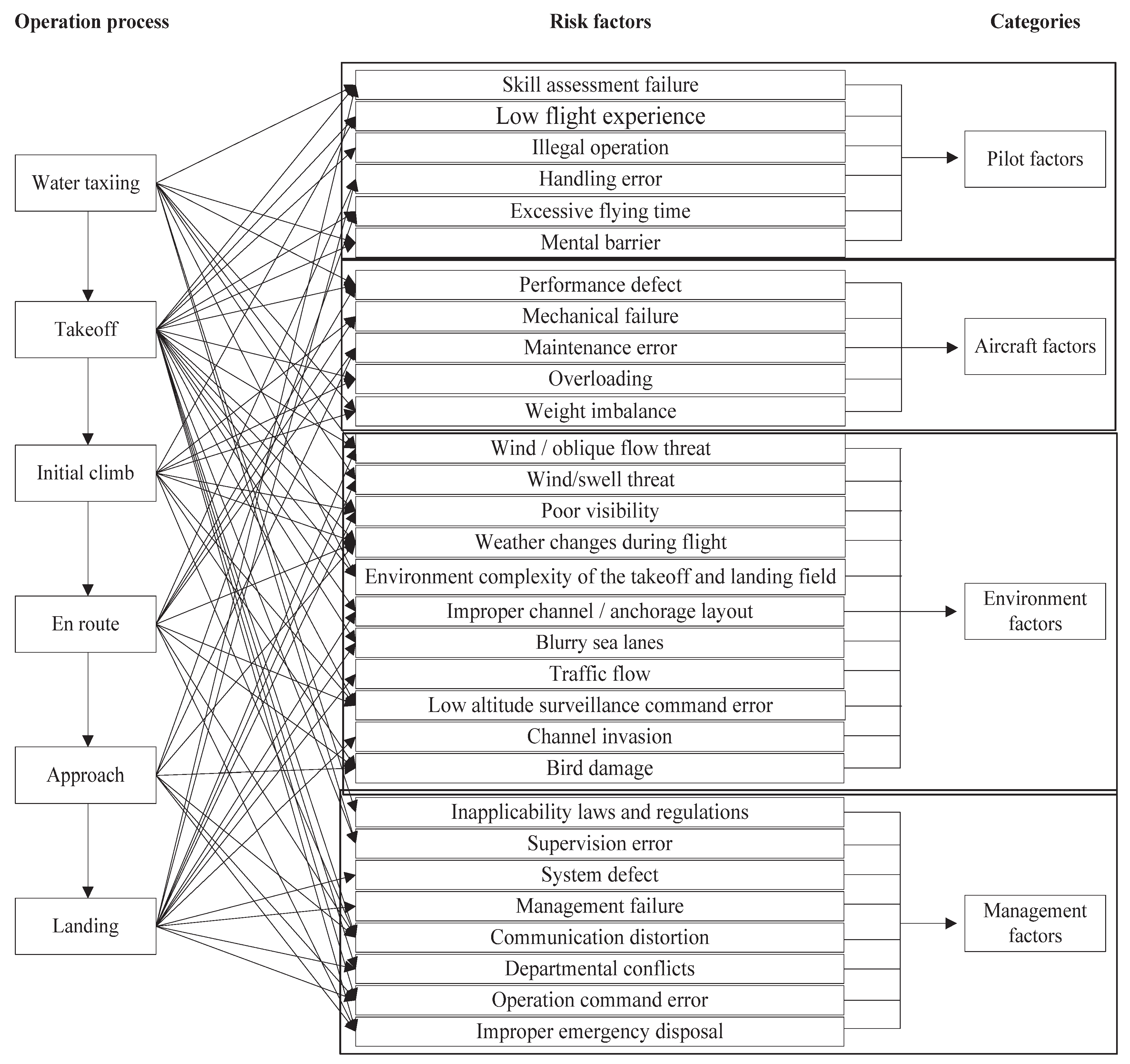
3.1. Risk Identification
- (1)
- Identified 12 risk factors by historical data
- (2)
- Identified 16 risk factors by literature review
- (3)
- Identified 21 risk factors by interviews with experts
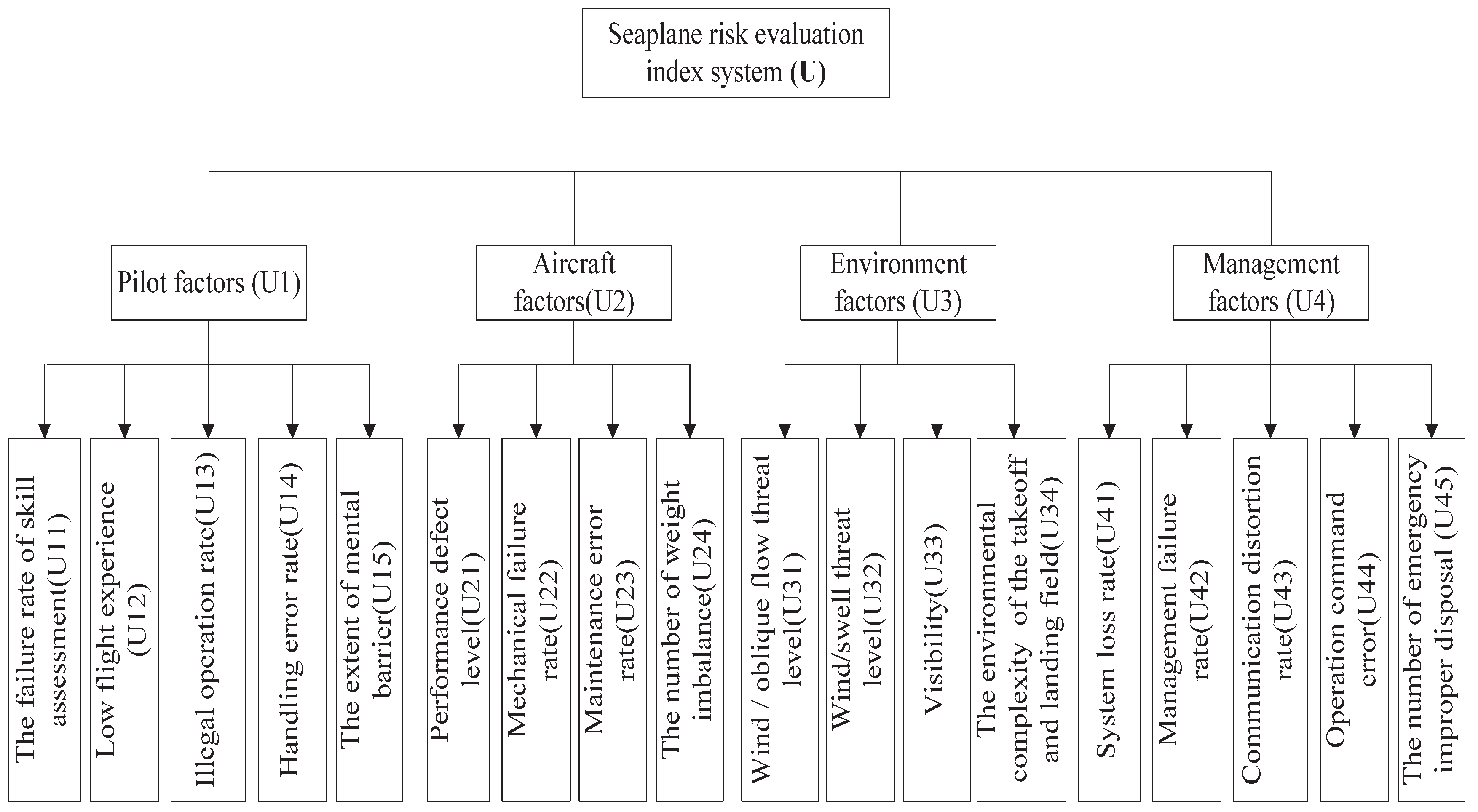
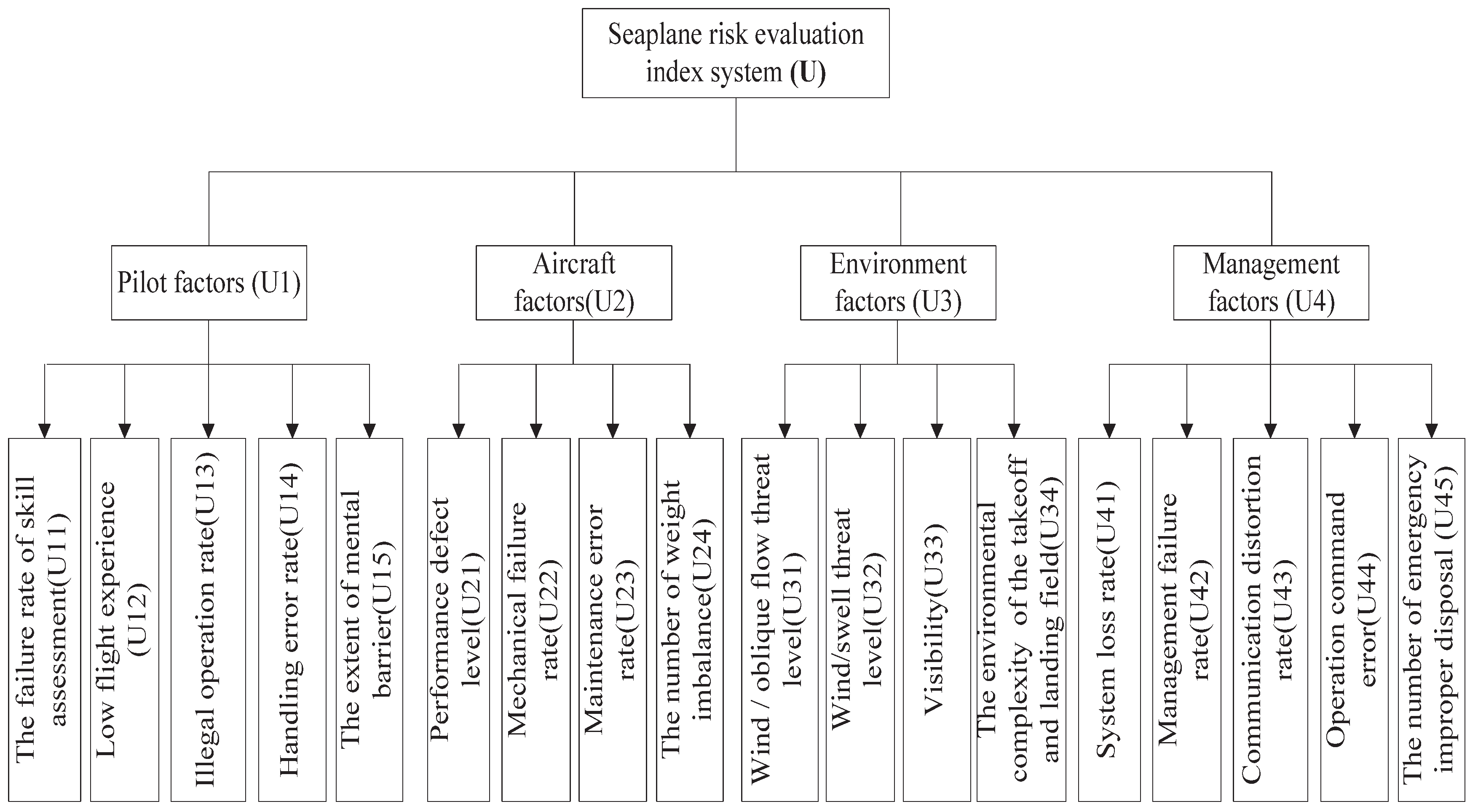
3.2. Construction and Screening of the Indicator System
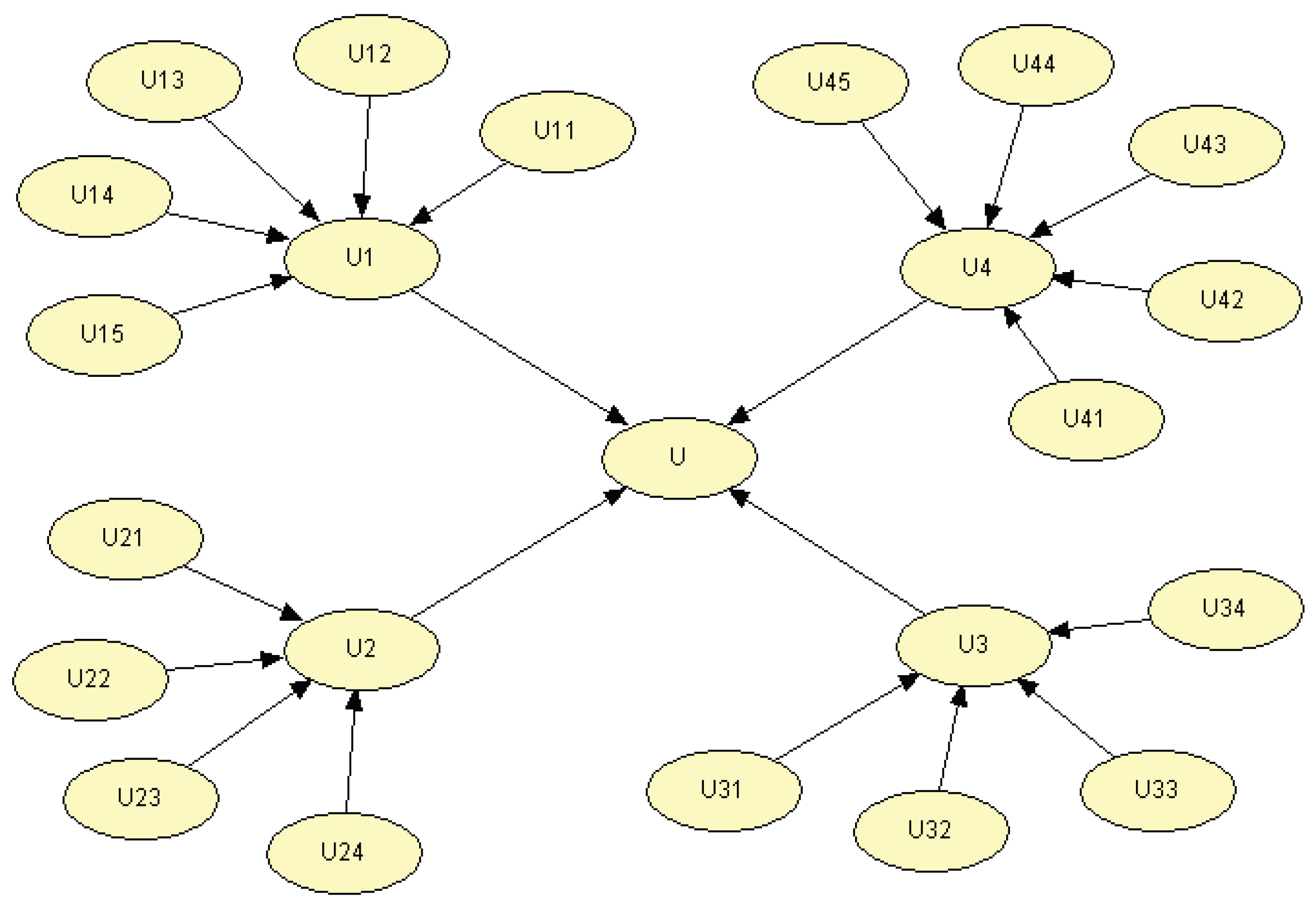
3.3. Establishment of the Bayesian Network
3.4. BN Validation Test
4. Application of the BN model
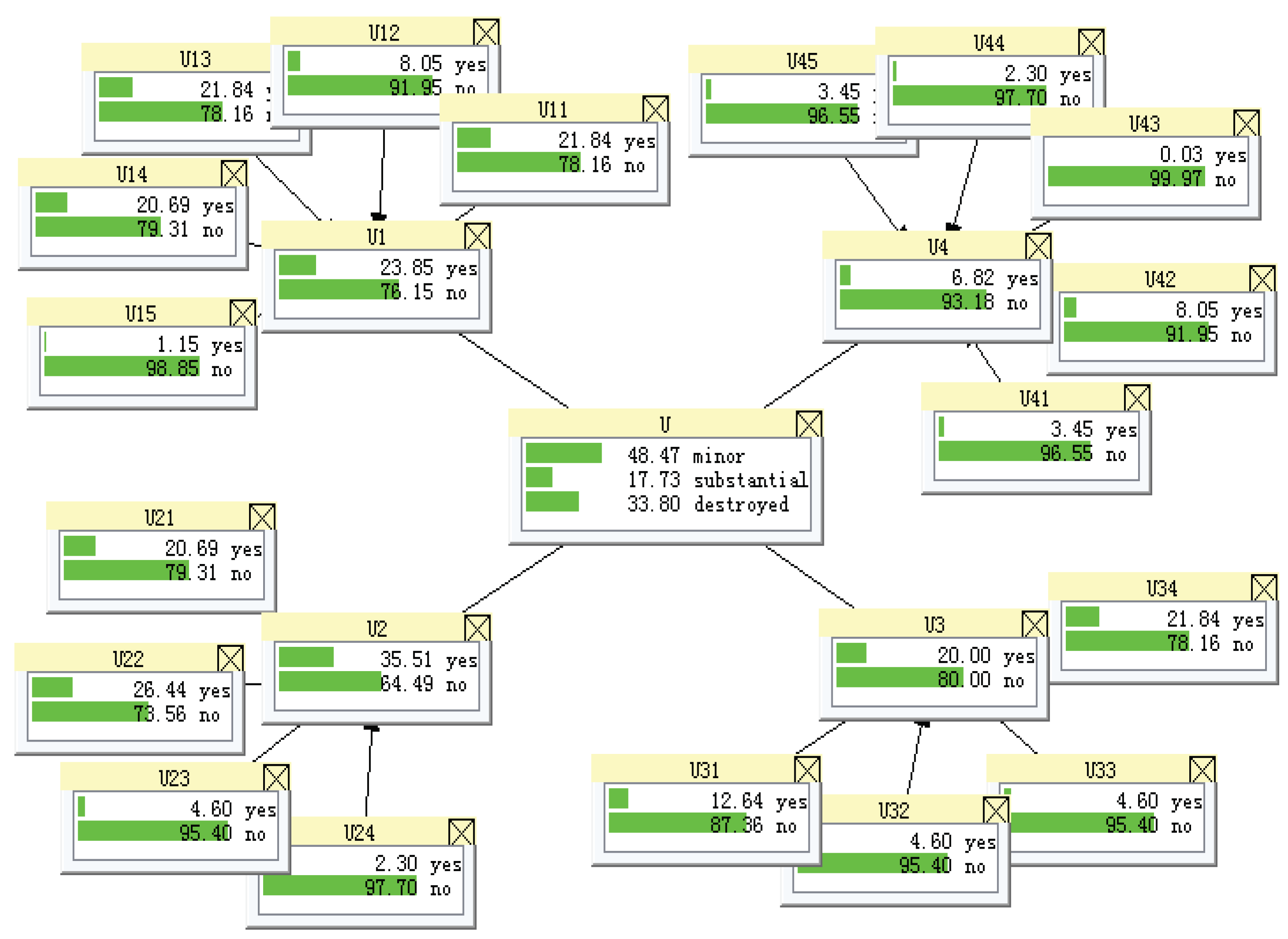
4.1. Diagnosis Inference
- (1)
- Diagnosis inference for pilot factors
- (2)
- Diagnosis inference for aircraft factors
- (3)
- Diagnosis inference for environmental factors
- (4)
- Diagnosis inference for management factors
4.2. Sensitivity Analysis
- (1)
- Sensitivity analysis for pilot factors
- (2)
- Sensitivity analysis for aircraft factors
- (3)
- Sensitivity analysis for environmental factors
- (4)
- Sensitivity analysis for management factors
5. Discussion
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Operation safety risk of the seaplane | Risk Category | Risk Factor | Description |
| Pilot risk | Skill assessment failure | The skill of the pilot does not meet the requirements | |
| Low flight experience | Water flight experience is low | ||
| Illegal operation | Pilots do not operate seaplanes in accordance with the regulations | ||
| Handling error | Pilots inadvertently mishandle the seaplane | ||
| Excessive flying time | The pilot’s standard flight time is exceeded | ||
| Mental barrier | The psychological problem of the pilot | ||
| Aircraft risk | Performance defect | Problems in the production of the seaplane | |
| Mechanical failure | Mechanical problems of the seaplane | ||
| Maintenance error | Poor maintenance of the seaplane | ||
| Overloading | The weight carried by the seaplane exceeds the specified maximum weight standard | ||
| Weight imbalance | The weight distribution of the seaplane is uneven | ||
| Environmental risk | Wind/oblique flow threat | Crosswind and oblique flow | |
| Wind/swell threat | Wind wave and swell wave | ||
| Poor visibility | The maximum distance that can be seen is limited | ||
| Weather changes during flight | Weather changes during the flight of the seaplane | ||
| Environmental complexity of the take-off and landing field | Water environment and airspace near the landing field | ||
| Improper channel/anchorage layout | Improper take-off and landing routes / improper location of seaplane | ||
| Blurry sea lanes | Water taxiway and runway logo are fuzzy | ||
| Traffic flow | The number of ships, motorboats, etc. near the landing field of a seaplane for a specific period | ||
| Low-altitude surveillance command error | Low-altitude airspace surveillance and command error | ||
| Channel invasion | An event that adversely affects the safety of the waterway | ||
| Bird hazard | The impact of birds around the landing site on the operational safety of seaplanes | ||
| Management risk | Inapplicability laws and regulations | Lack of regulations, or the existing laws and regulations do not apply | |
| Supervision error | Regulators are unaware of any possible safety problems in the operation of the seaplane | ||
| System loss | Lack of an internal system for developing the seaplane business | ||
| Management failure | The manager commits an error in coordinating the work of each stage of a seaplane | ||
| Communication distortion | Information changes, including loss, misleading, delay, etc. during the seaplane operation process | ||
| Departmental conflicts | Conflicts between departments due to cross responsibilities | ||
| Operation command error | During the operation process, the on-site command department delivers the wrong message | ||
| Improper emergency disposal | The emergency disposal is improper when a sudden condition occurs during the operation of a seaplane |
References
- Gobbi, G.; Smrcek, L.; Galbraith, R.; University of Glasgow; Barry Lightening; Malta, H.A.; Sträter, B.; Sträter Consulting; Majka, A.; Rzsezow University. 2011 Report on Current Strength and Weaknesses of Existing Seaplane/Amphibian Transport System as well as Future Opportunities Including Workshop Analysis; Technical Report FUSETRA (Future Seaplane Traffic); European Union: Glasgow, UK, 8 September 2011. [Google Scholar]
- Guo, G.; Xu, Y.; Wu, B. Overview of current progress and development of seaplane safety management. In Proceedings of the 2016 IEEE International Conference on Intelligent Transportation Engineering (ICITE), Singapore, 20–22 August 2016; pp. 58–63. [Google Scholar]
- Xiao, Q.; Luo, F. GT-SEM model for safety risk mechanism of amphibious seaplane during taking off and landing. China Saf. Sci. J. 2019, 29, 158–163. [Google Scholar]
- Xiao, Q.; Luo, F. Safety Risk Evolution of Amphibious Seaplane During Takeoff and Landing—Based on Complex Network. Complex Syst. Complex. Sci. 2019, 16, 19–30. [Google Scholar]
- Voloshchenko, V.Y. Seadrome: Increasing the safety of takeoff and landing operations in the seaplane basin. Russ. Aeronaut. (Iz VUZ) 2016, 59, 271–276. [Google Scholar] [CrossRef]
- Xiao, Q.; Luo, F. Discussion on the construction problem of civil seadrome. Agro Food Ind. Hi-Tech. 2017, 28, 3596–3599. [Google Scholar]
- Weng, J.; Zhou, Y. Analysis of Risk Factors and Safety Countermeasures of Collision between Seaplanes and Vessels Based on ISM Theory. ICTIS 2013 2013, 6, 2282–2288. [Google Scholar]
- Weng, J.J.; Zhou, Y. Analysis of risk factors of seaplane-vessel collision based on the integration of DEMATEL and ISM. Navig. China 2013, 36, 70–75. [Google Scholar]
- Weng, J.J.; Zhou, Y.; Su, W. Study on the Management Mode of Seaplane Navigation Safety. Adv. Mater. Res. 2014, 1030, 2634–2638. [Google Scholar] [CrossRef]
- Zhang, P.K.; Luo, F. FTA-BN modeling of runway conflict risk mechanism at water aerodrome. China Saf. Sci. J. 2018, 28, 177–182. [Google Scholar]
- Lindhe, A.; Rosen, L.; Norberg, T.; Bergstedt, O. Fault tree analysis for integrated and probabilistic risk analysis of drinking water systems. Water Res. 2009, 43, 1641–1653. [Google Scholar] [CrossRef]
- Khakzad, N.; Khan, F.; Amyotte, P.R. Safety analysis in process facilities: Comparison of fault tree and Bayesian network approaches. Reliab. Eng. Syst. Saf. 2011, 96, 925–932. [Google Scholar] [CrossRef]
- Kalantarnia, M.; Khan, F.; Hawboldt, K. Dynamic risk assessment using failure assessment and Bayesian theory. J. Loss Prev. Process Ind. 2009, 22, 600–606. [Google Scholar] [CrossRef]
- Neri, A.; Aspinall, W.P.; Cioni, R.; Bertagnini, A.; Baxter, P.J.; Zuccaro, G.; Woo, G. Developing an Event Tree for probabilistic hazard and risk assessment at Vesuvius. J. Volcanol. Geotherm. Res. 2008, 178, 397–415. [Google Scholar] [CrossRef]
- Khakzad, N.; Khan, F.; Amyotte, P.R. Dynamic risk analysis using bow-tie approach. Reliab. Eng. Syst. Saf. 2012, 104, 36–44. [Google Scholar] [CrossRef]
- Ferdous, R.; Khan, F.; Sadiq, R.; Amyotte, P.R.; Veitch, B. Handling and updating uncertain information in bow-tie analysis. J. Loss Prev. Process. Ind. 2012, 25, 8–19. [Google Scholar] [CrossRef]
- Cai, B.; Liu, Y.-H.; Liu, Z.; Tian, X.; Zhang, Y.; Ji, R. Application of Bayesian Networks in Quantitative Risk Assessment of Subsea Blowout Preventer Operations. Risk Anal. 2012, 33, 1293–1311. [Google Scholar] [CrossRef]
- Khakzad, N.; Khan, F.; Amyotte, P.R. Quantitative risk analysis of offshore drilling operations: A Bayesian approach. Saf. Sci. 2013, 57, 108–117. [Google Scholar] [CrossRef]
- Bhandari, J.; Abbassi, R.; Garaniya, V.; Khan, F. Risk analysis of deepwater drilling operations using Bayesian network. J. Loss Prev. Process. Ind. 2015, 38, 11–23. [Google Scholar] [CrossRef]
- Baksh, M.; Abbassi, R.; Garaniya, V.; Khan, F. A network based approach to envisage potential accidents in offshore process facilities. Process. Saf. Prog. 2016, 36, 178–191. [Google Scholar] [CrossRef]
- Abaei, M.M.; Abbassi, R.; Garaniya, V.; Chai, S.; Khan, F. Reliability assessment of marine floating structures using Bayesian network. Appl. Ocean Res. 2018, 76, 51–60. [Google Scholar] [CrossRef]
- Mazaheri, A.; Montewka, J.; Nisula, J.; Kujala, P. Usability of accident and incident reports for evidence-based risk modeling—A case study on ship grounding reports. Saf. Sci. 2015, 76, 202–214. [Google Scholar] [CrossRef]
- Dalkey, N.; Helmer, O. An experimental application of the Delphi method to the use of experts. Manag. Sci. 1963, 9, 458–467. [Google Scholar] [CrossRef]
- Hsu, C.C.; Sandford, B.A. The Delphi technique: Making sense of consensus. Pract. Assess. Res. Eval. 2007, 12, 1–8. [Google Scholar]
- Pitchforth, J.; Mengersen, K. A proposed Validation Framework for Expert Elicited Bayesian Networks; Pergamon Press, Inc.: Oxford, UK, 2013. [Google Scholar]
- Pearl, J. Markov and Bayesian networks: Two graphical representations of probabilistic knowledge. Probabilistic Reason. Intell. Syst. 1988, 3, 77–141. [Google Scholar]
- Trucco, P.; Cagno, E.; Ruggeri, F.; Grande, O. A Bayesian belief network modeling of organizational factors in risk analysis: A case study in maritime transportation. Reliab. Eng. Syst. Saf. 2008, 93, 845–856. [Google Scholar] [CrossRef]
- Zhang, G.; Thai, V.V. Expert elicitation and Bayesian Network modeling for shipping accidents: A literature review. Saf. Sci. 2016, 87, 53–62. [Google Scholar] [CrossRef]
- Darwiche, A. Modeling and Reasoning with Bayesian Networks; Cambridge University Press: Cambridge, UK, 2009. [Google Scholar]
- Edwards, E. Man and machine: Systems for safety. In Proceedings of British Airline Pilots Associations Technical Symposium; British Airline Pilots Associations: London, UK, 1972; pp. 21–36. [Google Scholar]
- A Latorella, K.; Prabhu, P.V. A review of human error in aviation maintenance and inspection. Int. J. Ind. Ergon. 2000, 26, 133–161. [Google Scholar] [CrossRef]
- Sotiralis, P.; Ventikos, N.; Hamann, R.; Golyshev, P.; Teixeira, A. Incorporation of human factors into ship collision risk models focusing on human centred design aspects. Reliab. Eng. Syst. Saf. 2016, 156, 210–227. [Google Scholar] [CrossRef]
- Herrera, I.A.; Nordskag, A.O.; Myhre, G.; Halvorsen, K. Aviation safety and maintenance under major organizational changes, investigating non-existing accidents. Accid. Anal. Prev. 2009, 41, 1155–1163. [Google Scholar] [CrossRef] [Green Version]
- Merrick, J.R.W.; Mazzuchi, T.A.; Harrald, J.R. Modeling risk in the dynamic environment of maritime transportation. In Proceedings of the Simulation Conference, 2001 Proceedings of the Winter, 2001, Arlington, VA, USA, 9–12 December 2001; pp. 1090–1098. [Google Scholar]
- Liu, Q.; Han, D.; Chen, Y.; Zhang, W. Research on navigation risk evolution in three gorges dam area based on system dynamics. China Saf. Sci. J. 2016, 26, 19–23. [Google Scholar]
- Coccon, F.; Zucchetta, M.; Bossi, G.; Borrotti, M.; Torricelli, P.; Franzoi, P. A Land-Use Perspective for Birdstrike Risk Assessment: The Attraction Risk Index. PLoS ONE. 2015, 10, e0128363. [Google Scholar] [CrossRef] [Green Version]
- Holloway C, M.; Johnson C, W. Distribution of causes in selected, U.S. aviation accident reports between 1996 and 2003. In Proceedings of the 22nd International System Safety Conference, Provdence, Rhode Island, 2–6 August 2004. [Google Scholar]
- Bazargan, M.; Guzhva, V.S. Impact of gender, age and experience of pilots on general aviation accidents. Accid. Anal. Prev. 2011, 43, 962–970. [Google Scholar] [CrossRef] [PubMed]
- Mcfadden, K.L. Risk models for analyzing pilot-error at US airlines: a comparative safety study. Comput. Ind. Eng. 2003, 44, 581–593. [Google Scholar] [CrossRef]
- Dambier, M.; Hinkelbein, J. Analysis of 2004 German general aviation aircraft accidents according to the HFACS model. Air Med. J. 2006, 25, 265–269. [Google Scholar] [CrossRef] [PubMed]
- Li, H.; SunR, S.; Liu, J.Q. Establishment of risk evaluation model for pilot safety based on comprehensive quality. J. Saf. Sci. Technol. 2013, 12, 155–159. [Google Scholar]
- Liang, G.-F.; Lin, J.-T.; Hwang, S.-L.; Wang, E.M.-Y.; Patterson, P. Preventing human errors in aviation maintenance using an on-line maintenance assistance platform. Int. J. Ind. Ergon. 2010, 40, 356–367. [Google Scholar] [CrossRef]
- Chang, Y.-H.; Shao, P.-C.; Chen, H.J. Performance evaluation of airport safety management systems in Taiwan. Saf. Sci. 2015, 75, 72–86. [Google Scholar] [CrossRef]
- Neil, M.; Fenton, N.; Nielson, L. Building large-scale Bayesian networks. Knowl. Eng. Rev. 2000, 15, 257–284. [Google Scholar] [CrossRef] [Green Version]
- Madsen, A.L.; Lang, M.; Kjærulff, U.B.; Jensen, F. Quantitative Approaches to Reasoning and Uncertainty; Springer: Berlin/Heidelberg, Germany, 2003; pp. 594–605. [Google Scholar]
- Afenyo, M.; Khan, F.; Veitch, B.; Yang, M. Arctic shipping accident scenario analysis using Bayesian Network approach. Ocean Eng. 2017, 133, 224–230. [Google Scholar] [CrossRef]
- Kelly, D.; Efthymiou, M.; Efthymiou, M. An analysis of human factors in fifty controlled flight into terrain aviation accidents from 2007 to 2017. J. Saf. Res. 2019, 69, 155–165. [Google Scholar] [CrossRef]
- Rao, A.H.; Marais, K. A state-based approach to modeling general aviation accidents. Reliab. Eng. Syst. Saf. 2020, 193, 106670. [Google Scholar] [CrossRef]
- Sheehan, B.; Murphy, F.; Mullins, M.; Ryan, C. Connected and autonomous vehicles: A cyber-risk classification framework. Transp. Res. Part A Policy Pr. 2019, 124, 523–536. [Google Scholar] [CrossRef]

| First Level | Second Level | Third Level | Arithmetic Mean | Variation Coefficient | Note |
|---|---|---|---|---|---|
| Operation safety risk of the seaplane | Pilot factor | Failure rate of skill assessment | 4.6 | 0.17 | * |
| Low flight experience | 5 | 0.00 | * | ||
| Illegal operation rate | 4.8 | 0.08 | * | ||
| Handling error rate | 4.2 | 0.28 | * | ||
| Excessive hours of flying time | 3.4 | 0.14 | |||
| Extent of mental barrier | 4.6 | 0.11 | * | ||
| Aircraft factor | Performance defect level | 4.2 | 0.18 | * | |
| Mechanical failure rate | 4.2 | 0.18 | * | ||
| Maintenance error rate | 4.4 | 0.18 | * | ||
| Frequency of overloading incidents | 3.4 | 0.14 | |||
| Frequency of weight imbalance incidents | 4.4 | 0.18 | * | ||
| Environmental factor | Wind / oblique flow threat level | 4.4 | 0.11 | * | |
| Wind/swell threat level | 4.8 | 0.08 | * | ||
| Visibility | 3.6 | 0.33 | * | ||
| Number of weather changes during flight | 3.4 | 0.24 | |||
| Environmental complexity of the takeoff and landing field | 4.2 | 0.10 | * | ||
| Improper channel / anchorage layout | 2.6 | 0.39 | |||
| Blurry degree of sea lanes | 3.2 | 0.23 | |||
| Traffic flow | 2.2 | 0.45 | |||
| Number of low-altitude surveillance errors | 2.8 | 0.47 | |||
| Number of channel invasions | 2.6 | 0.39 | |||
| Degree of bird hazard | 2.8 | 0.42 | |||
| Management factor | Degree of inapplicability of laws and regulations | 2.8 | 0.27 | ||
| Failure rate of regulatory oversight | 3.2 | 0.23 | |||
| System loss rate | 3.6 | 0.22 | * | ||
| Management failure rate | 3.8 | 0.20 | * | ||
| Communication distortion rate | 4.2 | 0.10 | * | ||
| Frequency and intensity of departmental conflicts | 3.2 | 0.23 | |||
| Operation command error rate | 4.0 | 0.22 | * | ||
| Number of improper emergency disposals | 4.6 | 0.17 | * |
| Test Data | ||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Case | U1 | U11 | U12 | U13 | U14 | U15 | U2 | U21 | U22 | U23 | U24 | U3 | U31 | U32 |
| 1 | N/A | yes | no | no | yes | no | N/A | yes | no | no | no | N/A | no | no |
| 2 | N/A | no | no | no | no | no | N/A | no | no | no | no | N/A | yes | no |
| 3 | N/A | no | yes | no | no | no | N/A | no | no | no | no | N/A | no | no |
| 4 | N/A | no | no | no | no | no | N/A | no | no | yes | no | N/A | no | no |
| 5 | N/A | no | no | no | yes | no | N/A | no | no | no | no | N/A | no | no |
| 6 | N/A | no | no | no | no | no | N/A | no | no | yes | no | N/A | no | no |
| 7 | N/A | no | no | no | no | no | N/A | yes | no | no | no | N/A | no | yes |
| 8 | N/A | yes | no | no | no | no | N/A | no | yes | no | no | N/A | no | no |
| 9 | N/A | no | no | yes | no | no | N/A | no | no | no | no | N/A | no | no |
| 10 | N/A | no | no | no | no | no | N/A | no | yes | no | no | N/A | no | no |
| Test Data | Validation Data | |||||||||||||
| actual | prediction probability | |||||||||||||
| case | U33 | U34 | U4 | U41 | U42 | U43 | U44 | U45 | U | minor | substantial | destroyed | ||
| 1 | no | yes | N/A | no | no | no | yes | no | destroyed | 0.1509 | 0.1711 | 0.6780 | ||
| 2 | no | no | N/A | no | no | yes | no | no | destroyed | 0.2722 | 0.2133 | 0.5144 | ||
| 3 | no | yes | N/A | no | no | no | no | no | destroyed | 0.3071 | 0.2088 | 0.4841 | ||
| 4 | no | no | N/A | no | no | no | no | no | minor | 0.5844 | 0.1767 | 0.2389 | ||
| 5 | no | no | N/A | no | no | no | no | no | substantial | 0.2769 | 0.6085 | 0.1146 | ||
| 6 | no | no | N/A | no | no | no | no | no | minor | 0.5844 | 0.1767 | 0.2389 | ||
| 7 | no | no | N/A | no | no | no | no | no | substantial | 0.2102 | 0.3864 | 0.4052 | ||
| 8 | no | no | N/A | no | no | no | no | no | minor | 0.4278 | 0.2336 | 0.2386 | ||
| 9 | no | no | N/A | no | no | no | no | no | minor | 0.6222 | 0.1118 | 0.2660 | ||
| 10 | no | no | N/A | no | no | yes | no | no | destroyed | 0.3240 | 0.2241 | 0.4519 | ||
| Node | Prior Probability P(State=Yes) | Posterior Probability and Change Rate P(State = Yes) | |||||
|---|---|---|---|---|---|---|---|
| Minor | Change Rate% | Substantial | Change Rate% | Destroyed | Change Rate% | ||
| U1 | 0.2385 | 0.0801 | –66.42 | 0.2513 | 5.37 | 0.4589 | 92.41 |
| U11 | 0.2184 | 0.1896 | –13.19 | 0.2207 | 1.05 | 0.2585 | 18.36 |
| U12 | 0.0805 | 0.0674 | –16.27 | 0.0815 | 1.24 | 0.0986 | 22.48 |
| U13 | 0.2184 | 0.1773 | –18.82 | 0.2217 | 1.51 | 0.2756 | 26.19 |
| U14 | 0.2069 | 0.1601 | –22.62 | 0.2107 | 1.84 | 0.2720 | 31.46 |
| U15 | 0.0115 | 0.0068 | –40.87 | 0.0119 | 3.48 | 0.0180 | 56.52 |
| U2 | 0.3551 | 0.1748 | –50.77 | 0.4756 | 33.93 | 0.5506 | 55.05 |
| U21 | 0.2069 | 0.1389 | –32.87 | 0.2523 | 21.94 | 0.2806 | 35.62 |
| U22 | 0.2644 | 0.1650 | –37.59 | 0.3308 | 25.11 | 0.3721 | 40.73 |
| U23 | 0.0460 | 0.0346 | –24.78 | 0.0535 | 16.30 | 0.0583 | 26.74 |
| U24 | 0.0230 | 0.0166 | –27.83 | 0.0273 | 18.70 | 0.0299 | 30.00 |
| U3 | 0.2000 | 0.1096 | –45.20 | 0.2863 | 43.15 | 0.2844 | 42.20 |
| U31 | 0.1264 | 0.1059 | –16.22 | 0.1460 | 15.51 | 0.1456 | 15.19 |
| U32 | 0.0460 | 0.0384 | –16.52 | 0.0532 | 15.65 | 0.0530 | 15.21 |
| U33 | 0.0460 | 0.0331 | –28.04 | 0.0582 | 26.52 | 0.0580 | 26.08 |
| U34 | 0.2184 | 0.1753 | –19.73 | 0.2596 | 18.86 | 0.2586 | 18.40 |
| U4 | 0.0682 | 0.0233 | –65.84 | 0.0827 | 21.26 | 0.1251 | 83.43 |
| U41 | 0.0345 | 0.0303 | –12.17 | 0.0358 | 3.77 | 0.0397 | 15.07 |
| U42 | 0.0805 | 0.0660 | –18.01 | 0.0851 | 5.71 | 0.0988 | 22.73 |
| U43 | 0.0003 | 0.0002 | –33.33 | 0.0003 | 0.00 | 0.0003 | 0.00 |
| U44 | 0.0230 | 0.0157 | –31.74 | 0.0253 | 10.00 | 0.0322 | 40.00 |
| U45 | 0.0345 | 0.0224 | –35.07 | 0.0384 | 11.30 | 0.0497 | 44.06 |
| Factor Description | Prior Probability | Posterior Probability | Change Rate % |
|---|---|---|---|
| U11 | 0.2184 | 0.3569 | 63.42 |
| U12 | 0.0805 | 0.1432 | 77.89 |
| U13 | 0.2184 | 0.4161 | 90.52 |
| U14 | 0.2069 | 0.4319 | 108.75 |
| U15 | 0.0115 | 0.0340 | 195.65 |
| Factor Description | Prior Probability | Posterior Probability | Change Rate% |
|---|---|---|---|
| U21 | 0.2069 | 0.4501 | 117.54 |
| U22 | 0.2644 | 0.6198 | 134.42 |
| U23 | 0.0460 | 0.0865 | 88.04 |
| U24 | 0.0230 | 0.0459 | 99.57 |
| Factor Description | Prior Probability | Posterior Probability | Change Rate% |
|---|---|---|---|
| U31 | 0.1264 | 0.3079 | 143.59 |
| U32 | 0.0460 | 0.1129 | 145.43 |
| U33 | 0.0460 | 0.1595 | 246.74 |
| U34 | 0.2184 | 0.5999 | 174.68 |
| Factor Description | Prior Probability | Posterior Probability | Change Rate% |
|---|---|---|---|
| U41 | 0.0345 | 0.1205 | 249.28 |
| U42 | 0.0805 | 0.3800 | 372.05 |
| U43 | 0.0003 | 0.0014 | 366.67 |
| U44 | 0.0230 | 0.1744 | 658.26 |
| U45 | 0.0345 | 0.2844 | 724.35 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xiao, Q.; Luo, F.; Li, Y. Risk Assessment of Seaplane Operation Safety Using Bayesian Network. Symmetry 2020, 12, 888. https://doi.org/10.3390/sym12060888
Xiao Q, Luo F, Li Y. Risk Assessment of Seaplane Operation Safety Using Bayesian Network. Symmetry. 2020; 12(6):888. https://doi.org/10.3390/sym12060888
Chicago/Turabian StyleXiao, Qin, Fan Luo, and Yapeng Li. 2020. "Risk Assessment of Seaplane Operation Safety Using Bayesian Network" Symmetry 12, no. 6: 888. https://doi.org/10.3390/sym12060888
APA StyleXiao, Q., Luo, F., & Li, Y. (2020). Risk Assessment of Seaplane Operation Safety Using Bayesian Network. Symmetry, 12(6), 888. https://doi.org/10.3390/sym12060888