1. Introduction
Pin-jointed bar assemblies are becoming increasingly popular in structural engineering. The concepts of statical and kinematical determinacy are key to understanding the mechanics of these kinds of structures. A pin-jointed framework is clearly statically determinate if the internal force in each bar can be determined by means of the equations of equilibrium for a given set of external loads applied at the nodes.
Then, the addition of any extra bars will make the framework become statically indeterminate. There are more unknowns than equations of equilibrium, and the solution for the bar tensions is not unique [
1]. On the other hand, a pin-jointed framework is said to be kinematically determinate in the sense that the position of the nodes can be uniquely determined by the lengths of the bars. However, if any bars of the frame are removed, the resulting assembly becomes kinematically determinate, since the location of the nodes is not now uniquely determined by the length of the bars [
2,
3].
Thus far, the most commonly used classification criterion for them is proposed by Pellegrino and Calladine [
4], depending on whether the assembly is statically determinate or indeterminate, and whether kinematically determinate or indeterminate (see
Table 1).
The prestressed bar systems are limited to type II and type IV assemblies since they need, at least, one state of self-stress in the absence of external loads, i.e., to be statically indeterminate [
5]. The cable-strut systems are the typical examples of type II or type IV, including cable trusses, cable domes, tensegrity structures, etc. The introduction of prestress for type II assemblies can improve their structural stiffness and limit the components to linear-elastic states under loads, while the assemblies of type IV rely on prestress to achieve stiffness, and also to prevent any cable segments or fabric panels from becoming slack [
6,
7]. Even a type III assembly possessing no self-stress states (say a hanging cable or a cable net) can also become stable when the vector of nodal loads is orthogonal to its mechanisms [
8,
9], which is very similar to the principle that prestress stiffens the mechanisms of type IV assemblies.
The common feature of the foregoing cases is that the initial internal forces, no matter if caused by prestress or external loads, significantly changes the static characteristics of the structures. Particularly, it affects the stiffness of the structures, which should be taken into account in the calculation of the structural response under external loads [
10]. At present, there are two kinds of methods to consider the initial internal forces in static analysis. One of them can be classified as the displacement-based method, such as the Finite Element Method, in which the so-called geometrical stiffness matrix is incorporated into the tangent stiffness matrix [
11,
12,
13]. Then, the analysis of type III and IV assemblies poses no difficulty, because the modified tangent stiffness matrices have full rank. The other kind is the matrix force method, proposed and developed by many scholars [
14,
15,
16,
17], where the analysis of the equilibrium matrix is performed to determine the kinematic determinacy and states of the self-stress. By introducing the so-called product-force vectors, the traditional equilibrium matrix is modified to meet the condition of full row rank.
As we know, displacement-based methods can be conveniently programmed to consider the geometric nonlinearities numerically. To resort to iterative schemes for the above structures, as described by Kaveh [
18], the deformations due to any load condition, or the structural response to a design change, can be calculated with high accuracy. However, this kind of approach does not provide much insight, and no rough estimates can be made. In contrast, because the matrix force methods are based on the singular value decomposition on the asymmetric equilibrium matrices, the computation requires a large amount of computer memory and, thus, becomes computationally expensive [
15]. Even so, the force method has its inherent advantages: the physical concepts of each item in equations are fairly explicit; the essential structural and kinematic properties, e.g., the rigid body motions or infinitesimal mechanisms, the states of self-stress, etc., can be explained clearly from the orthogonal subspace of the equilibrium matrix. It has made the matrix force method complementary to the displacement-based method and irreplaceable in the design of pin-jointed bar assemblies. Paradoxically, the basic equations used in the present matrix force method have some limitations—to keep the conciseness in form, excessive hypotheses have been made in the derivation of the formulas, which may narrow their application scope; various but fragmented equations have been produced for specialized applications, which may lead to a puzzle of choice. Hence, it is necessary to seek a set of unified fundamental formulas, being fit for a general linear static analysis of pin-jointed bar assemblies. Meanwhile, the proposed formulas should keep an acceptable complexity in form, and reduce to the fundamental formulas of traditional force method when they are applied to type I assemblies without initial internal forces. This paper deals with this matter, aims to extend the important work given by Pellegrino and Calladine [
4,
14] and broaden its application scenarios further.
The layout of the paper is as follows. In
Section 2, starting from the incremental form of equilibrium equations, as well as the compatibility equations, an analytic theory considering the effect of initial internal forces is developed on the basis of linear elasticity hypothesis. Then, the axial force variables and displacement variables are decoupled by means of linear algebra and the Moore–Penrose generalized inverse theory in
Section 3. The fundamental formulas, including generalized equilibrium equations and generalized compatibility equations are obtained, without sacrificing the insight that the traditional force methods give.
Section 4 investigates the correlations between this method and earlier work commonly used. It is followed by several examples in
Section 5, some of which were first included in Pellegrino [
4]. The results are compared carefully to test the accuracy and applicability of the proposed method.
Section 6 concludes the paper with discussion and some suggestions for future work.
2. Basic Theory
In this section, an analytic theory will be developed for static analysis of pin-jointed bar assemblies. Before that, the fundamental assumptions are first stated as follows: (a) members are connected by pin joints; (b) both cables and struts are assumed to have linear elastic stress–strain relationships; (c) both local and global buckling are not considered; (d) self-weight of the structure is neglected.
Consider a three-dimensional assembly, including
b pin-jointed bars and
d nodal degrees of freedom. Denote the initial axial force in
k-th bar as
nk, so that the axial force vector of the assembly can be defined as
n = [
n1,
n2, …,
nb]
T ∊ ℜ
b. The equilibrium equations at nodes of the structure are written in the form [
14]:
where
A ∊ ℜ
d×b is the equilibrium matrix of the structure containing the orientations of members;
q ∊ ℜ
d is nodal loads vector made up of the x-, y-, and z-components of the external loads applied at each node.
Define member length vector, member length matrix, and force density vector of the structure as
l = [
l1,
l2, …,
lb]
T ∊ ℜ
b,
L = diag(
l1,
l2, …,
lb) ∊ ℜ
b×b and
t = [
n1/
l1,
n2/
l2, …,
nb/
lb]
T ∊ ℜ
b respectively. The vector
n containing the axial forces of members can be expressed by
Substituting Equation (2) into Equation (1) gives:
For the left-hand side of Equation (3), Vassart and Motro [
19] resolved the nodal coordinates from
AL and gave an equivalent expression using Kronecher product notation “
” as
where
I is the three-order identity matrix for a three-dimensional structure;
x is a vector contains x-, y-, and z-components of the coordinates for each node; the symmetric matrix Ω can be written directly by means of the force densities [
19]. The (i, j)-component Ω (i, j) of Ω is given by
Then, the incremental form of Equation (3) is given by
Noting that the mathematical expression of each entry in matrix
AL only contains the components of nodal coordinates or be zero alternatively, δ(
AL) can be obtained by replacing coordinate components with the corresponding incremental ones in
AL. Then, it is clear that the following equations hold by considering Equation (4)
where δ
x is a vector of incremental coordinates, describing infinitesimal movements of nodes. In Equation (7), the coefficient matrix
is equivalent to the so-called geometric stiffness matrix
KG in conventional finite element formulas since it corresponds to the stiffness resulting from the reorientation of stressed members. For simplicity, Equation (7) is rewritten as
Next, let us provide much insight to the second term in left side of Equation (6) further
where the relationship
t =
L−1n is considered. Noting that the differential of
L−1 yields
The following equation holds
Defining the force density matrix as
T = diag(
n1/
l1,
n2/
l2, …,
nb/
lb) = diag(
t) ∊ ℜ
b×b, we also have the relationship
where δ
l is an elongation vector, consisting of infinitesimal extension of each member. Substitution of Equation (12) into Equation (11) yields
Considering the kinematic compatibility equations linking δ
x to δ
l hold as [
14]
where the contragredient relationship between equilibrium matrix and compatibility matrix is adopted, Equation (13) can be rewritten by
Substitution of Equation (15) into Equation (9) yields:
By substituting Equations (8) and (16) into Equation (6), we can get:
Then Equation (17) can be rewritten as:
where
J is a symmetric matrix since
KG and ATA
T are symmetric matrices.
It can be seen from Equation (19) that the axial forces of members, as well as the coordinates of nodes, may change to equilibrate any load increment δq for assemblies made from pin-jointed bars. Particularly, the resistance resulting from the slight change of nodal coordinates can only play a role for prestressed structures.
On the other hand, considering that the elongation δ
l of each member consists of two parts: (i) an inelastic part caused by the imposed length change
e, and (ii) a linear-elastic part due to the change of axial force δ
n, δ
l and δ
n are related by
In Equation (20), the vector e contains the imposed elongation e of each member; the axial flexibility matrix F is defined as F = diag[l1/(E1A1), l2/(E2A2),…,lb/(EbAb)], where Ek, Ak, lk denote Young’s modulus, cross-sectional area and length of k-th member, respectively.
Hence, the compatibility equations and the constitutive relations can be written together by substituting Equation (20) into Equation (14):
In summary, based on the assumption of small deformation and linear elasticity, Equations (19) and (21) constitute the fundamental equations of static analysis for a general pin-jointed assembly made from bars, i.e.,
3. A Unified Form of Fundamental Formulas
It should be noted that it is not convenient to use Equation (22) directly since δn and δx are coupled with each other. Without loss of generality, type IV assemblies are employed as illustrative examples in this section. Then, the techniques of linear algebra and generalized inverse matrix are applied to decouple δn and δx, thereby obtaining a new set of fundamental equations, which have the similar form with the ones of the traditional force method.
When δ
x is looked upon as the basic unknown variable of the system, the following consistent condition should be satisfied to ensure the existence of the solutions in Equation (21):
where a set of independent self-stress states are written as the columns of a matrix
S satisfying
AS =
0. If Equation (23) holds, δ
x can be solved as
where a set of independent mechanisms are written as the columns of a matrix
H satisfying
ATH =
0. The matrices
S and
H can be determined by using Singular Value Decomposition on
A [
20]. The superscript “+” in Equation (24) represents Moore–Penrose generalized inverse. The vector
β gives the coefficient of each of the basis mechanisms. According to the properties of Moore-Penrose generalized inverse, the following equation holds [
21]:
Hence, Equation (24) can be rewritten as:
which is substituted into Equation (19) and tidied up as
Meanwhile, noting that
J =
KG −
ATAT, the following equation holds
Then Equation (27) can be rewritten by:
As observed, the combination of Equations (30) and (23) is completely equivalent to Equation (22), the matrix form of which is:
On the other hand, if δ
n is regarded as the basic unknown variable of the system, starting from Equation (19), we can get:
Similarly, the consistent condition of Equation (32) is:
Noting that
J is a symmetric matrix, then
Substituting Equation (34) into Equation (33) yields:
If Equation (35) holds, δ
n can be solved as
where the vector
α contains the coefficient of each of the basis state of self-stress. Substitute Equation (36) into Equation (21) and tidy up
Noting that
, Equation (37) can be further written by:
As observed, the combination of Equations (38) and (35) is also equivalent to Equation (22), the matrix form of which is:
It is noteworthy that the coefficient matrix of Equation (39) is transposed to the one of Equation (31), which is denoted by symbol ‘
B’ for simplicity, i.e.,
Meanwhile, let
,
and
,
. Then Equations (31) and (39) can be abbreviated as:
Denoting the rank of
A as
r, it is easy to verify that
B is a square matrix of (
d +
b −
r) order. The submatrix
KGH of
B consists of the so-called product-force vector [
14] resulting from each independent mechanism, arranged by columns. On the other hand, the submatrix -
STF of
B is comprised of the bar-elongation vector arising from each independent state of self-stress, arranged by rows and taking negative sign. When all the mechanisms of the structure can be stiffened by initial internal forces, the matrix
B has full rank. Then
and
can be solved readily through Equations (41) and (42), that is, the solutions of δ
n,
β, δ
x and
α are obtained simultaneously.
It is noted that, based on the assumption of small deformation and linear elasticity, the fundamental equations of static analysis of force method for type I assemblies include equilibrium equations ‘
Aδ
n = δ
q’ and compatibility equations ‘
ATδ
x = δ
l = FA-1δ
q + e’ (the equilibrium matrix
A also has full rank), which are consistent with Equations (41) and (42) in form. Particularly, when Equations (41) and (42) are used for type I assemblies, the matrix
B is reduced to
A, while
and
degenerate into δ
q and δ
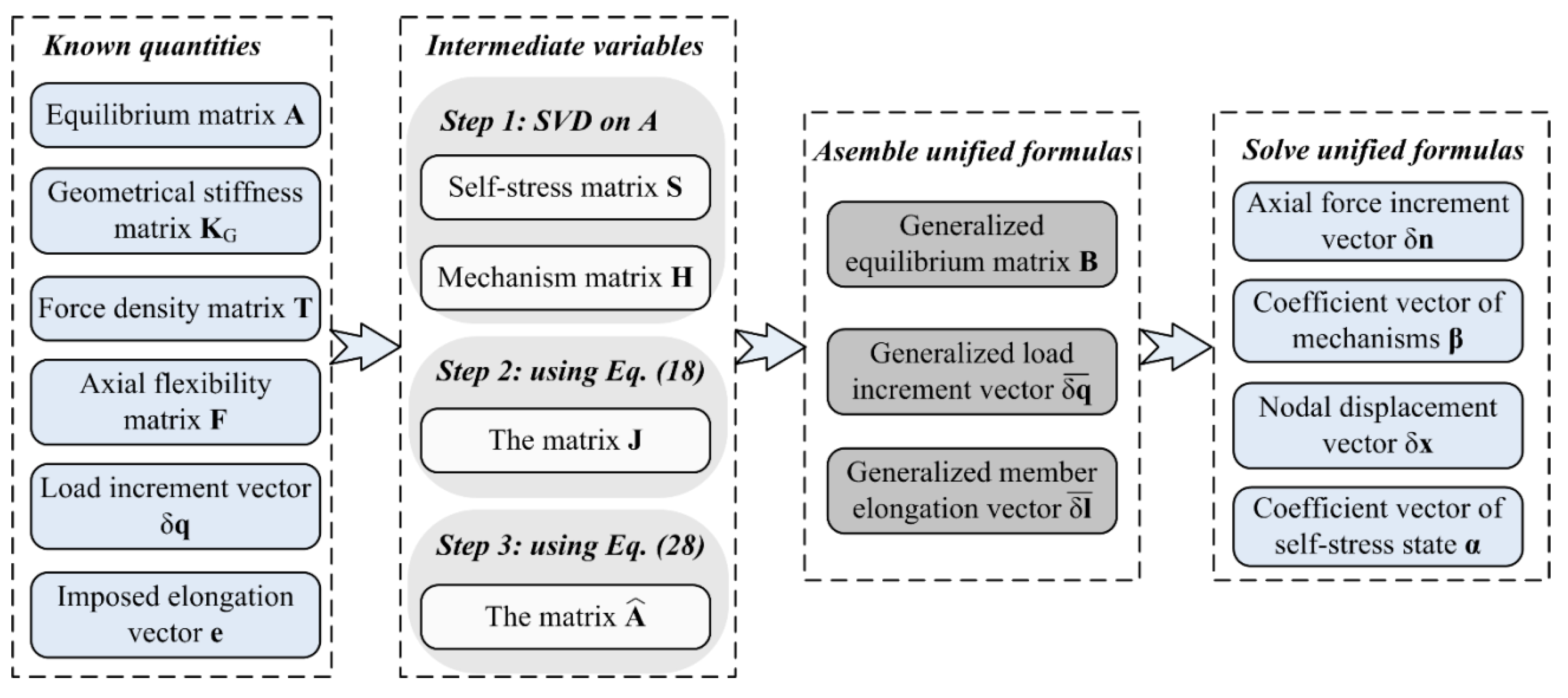
l, respectively. Therefore, they can be regarded as generalized equilibrium equations and compatibility equations implying constitutive relations. Since the derivation of Equations (41) and (42) does not involve the unique properties of type IV assemblies, they are applicable to types I, II, and III assemblies as well. In order to facilitate the readers to follow the above derivation process,
Figure 1 gives a road map for development of the unified formulas presented in this section, while
Figure 2 shows the calculation steps to guide the designers to apply the proposed formulas.
5. Numerical Examples
Example 1 [
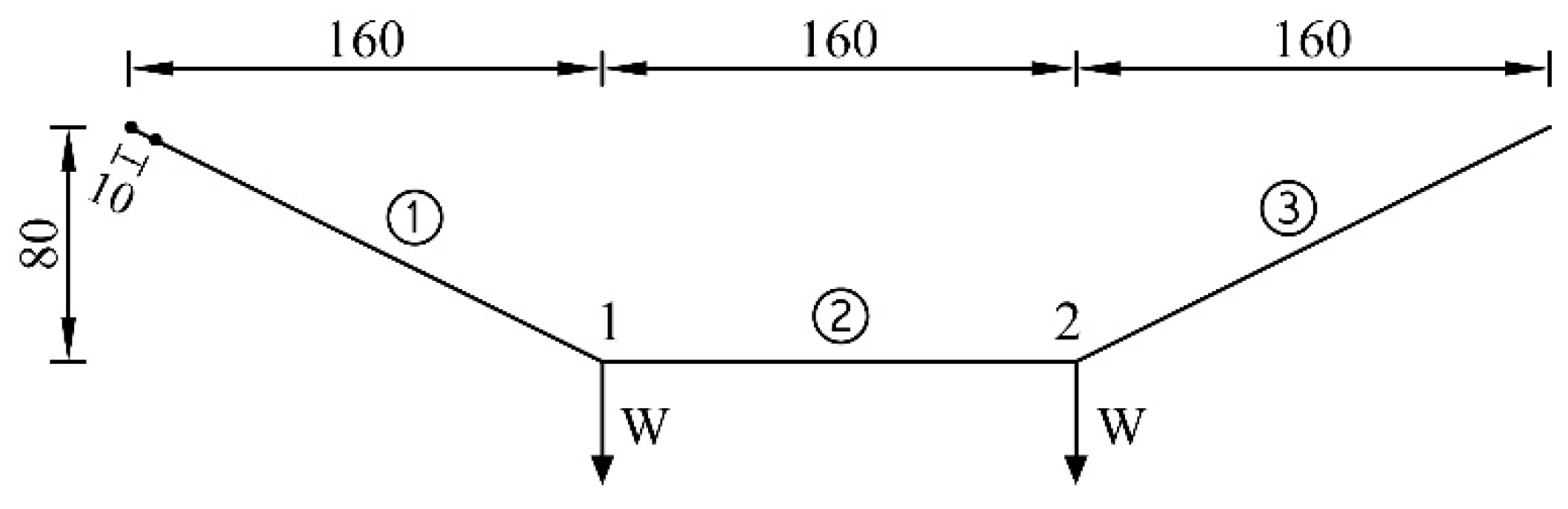
4]
Figure 3 shows a planar hanging cable with three segments under concentrated loads. The product of Young’s modulus and the cross-section area of the cable satisfies EA = 1.836 × 10
4 N. Two equal weights were hung as shown in
Figure 3. All dimensions are in mm. Consider the situation that the cable segment 1 is shortened by 10 mm (it is obtained by letting 10 mm of cable slide through the left-hand pin), while the lengths of cable segments 2 and 3 are fixed. How to determine the final configurations when W = 30 N and W = 3000 N are imposed, respectively?
The system of equilibrium Equation (1) for this assembly is
The rank of
A is 3. Hence, the numbers of independent mechanisms and self-stress states are m = 1 and s = 0 respectively, which means that this system belongs to type III—statically determinate and kinematically indeterminate assemblies. The unique mechanism composing the matrix
H can be obtained by Singular Value Decomposition of the matrix
A, which is normalized as:
The initial axial forces of the cable segments are solved from the equilibrium equations:
Then, the force density vector can be calculated further:
KG is obtained from the following formula:
A, T, and KG are substituted into Equation (18) to get the matrix J. The axial flexibility matrix F is also assembled. Then the matrix can be obtained by substituting F and J into Equation (28).
When W = 30 N holds, the generalized equilibrium matrix
B can be obtained from Equation (40):
It is easy to verify that the matrix B has full rank, and the initial nodal loads vector q is orthogonal to the mechanism H. In other words, the mechanism is stiffened by the external loads. The system becomes a relatively stable structure that can withstand the external disturbance.
Consider that the cable segment 1 is shortened by 10 mm, i.e., the imposed elongation vector satisfies
e = [−10 0 0]
T, while the increments of the nodal loads satisfy δ
q =
0. The generalized nodal loads vector (incremental form) and bar elongation vector are given as:
Then, the following solutions are derived from Equations (41) and (42), respectively
and
Similarly, the static analysis can be performed for the case of W = 3000 N through the same algorithm as described above. In addition, the fundamental formulas of the so-called matrix force method (see
Section 4.2) and the iterative schemes of the matrix displacement method (see
Section 4.1) are also employed to solve the same problem (the latter is implemented in Matlab 7.0 (R14) software, and its calculation results are regarded as a standard herein). For simplicity, Methods 1, 2, and 3 are used to represent the method proposed in this paper, the matrix force method, and the nonlinear matrix displacement method respectively. The axial forces of members and the displacements of nodes are listed in
Table 2 and
Table 3.
It has been found that when the initial external load W is small (e.g., W = 30 N), the nodal displacements solved by both Method 1 and Method 2 are comparable, and approximate the numerical solutions obtained from Method 3 considering the geometric nonlinearity. When W becomes large (e.g., W = 3000 N), the errors using Method 2 increase dramatically, whereas the results obtained from Method 1 even fit better with the numerical solutions—the maximum error is only 1.81% in comparison with 7.18% when W = 30 N. Understandably, the increment of W will increase the initial axial forces of members, which will strengthen the rigidity of the structure, which will weaken the nonlinearity of the structure. Hence, the errors using Method 1 decrease when W becomes large.
It is also interesting to note that Method 2 gives the same calculation results for both situations of W = 30 N and W = 3000 N. The reason is that, to deal with type III assemblies, one of the fundamental equations of Method 2—Equation (45)—is reduced to:
Since δ
q =
0 holds in this example, we can get the solutions of δ
n =
0 and
βII =
0 (i.e., δ
x = δ
xI) from the above formula, substituting which into Equation (50) gives
As observed, δx solved from the above formula is irrelevant to the initial nodal load W.
In fact, when the value of W is small, it only plays a role of tightening the cable segments, and the elastic deformation caused by W can be ignored. In this case, the calculation model of the system is simplified as a mechanism composed of three rigid bars, as shown in
Figure 4. Therefore, a 10-mm shortening of cable segment 1 only results in nodal displacements and causes no axial force in the cable. The solutions derived from the matrix force method correspond to this situation. However, when the value of W is large, the effect of preventing the cable segment 1 shortened has to be taken into account, which will definitely cause the elastic deformation of the cable segments. Hence, the simplified model shown in
Figure 4 cannot be employed, and the matrix force method is no longer applicable.
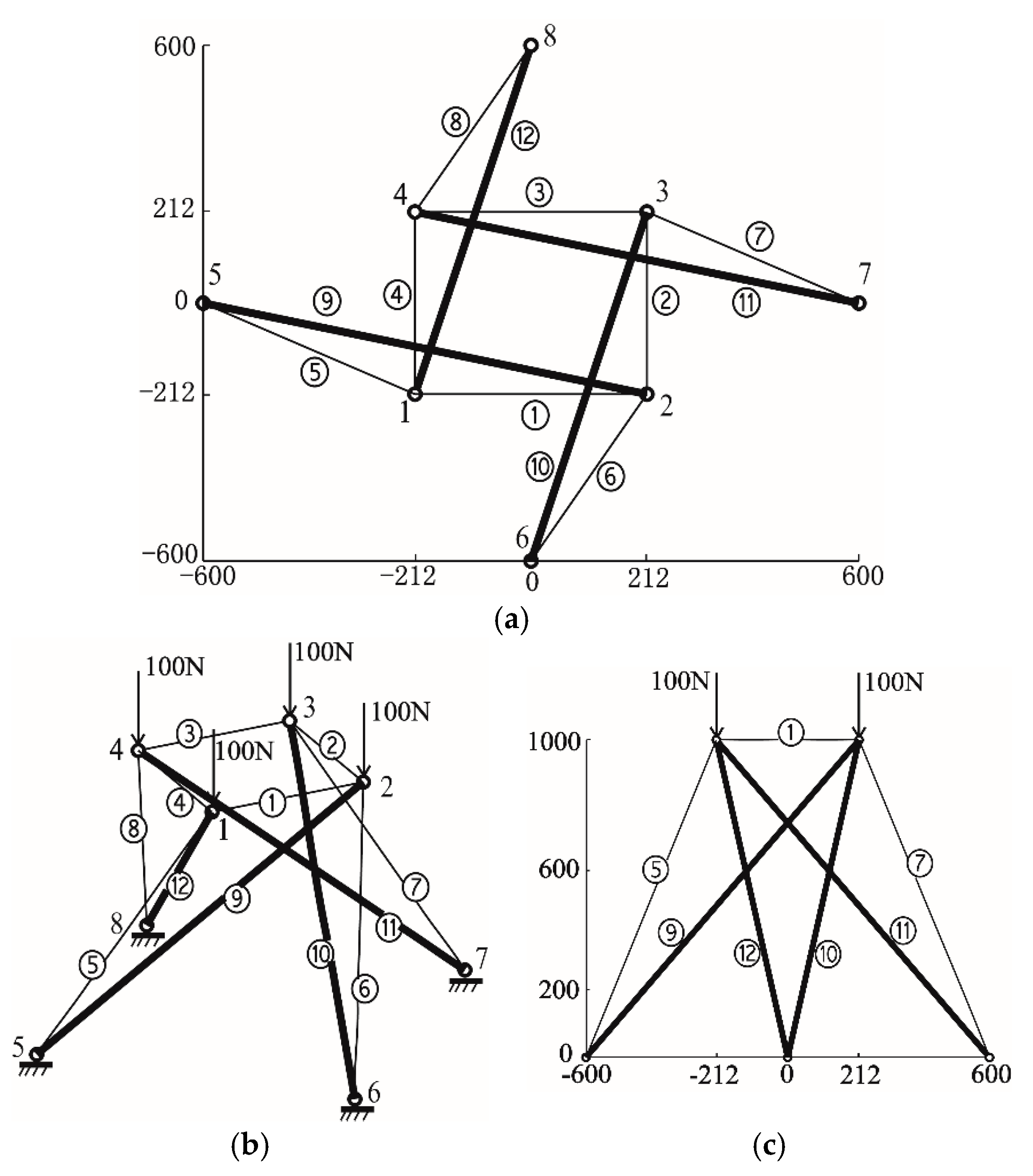
Example 2
Figure 5 shows a prestressed cable-strut structure composed of 4 struts (drawn by thick lines) and 8 cables (drawn by thin lines). It possesses 8 nodes, in which the four upper nodes are free and the four lower ones are pin-jointed with the ground. Hence, the nodal degree of freedom of the system
d is equal to 12. The rank of equilibrium matrix
A is 11. Hence, the numbers of independent mechanisms and self-stress states are m = 1 and s = 1 respectively, which means that this system belongs to type IV—statically and kinematically indeterminate assemblies. The mechanism of this structure can be stiffened by introducing a certain amount of prestress. In this example, the prestress state can be determined by multiplying the unique normalized self-stress state by a coefficient
μ, so that
μ represents the level of prestress. Assume that
μ = 8000 N holds. Meanwhile, the products of Young’s modulus and the cross-section area for cables and struts satisfy (EA)
cable = 1.836 × 10
4 N and (EA)
strut = 5.796 × 10
6N. Let us consider the following two situations respectively:
Situation 1: the vertical concentrated loads are applied on the four upper nodes, as shown in
Figure 5b.
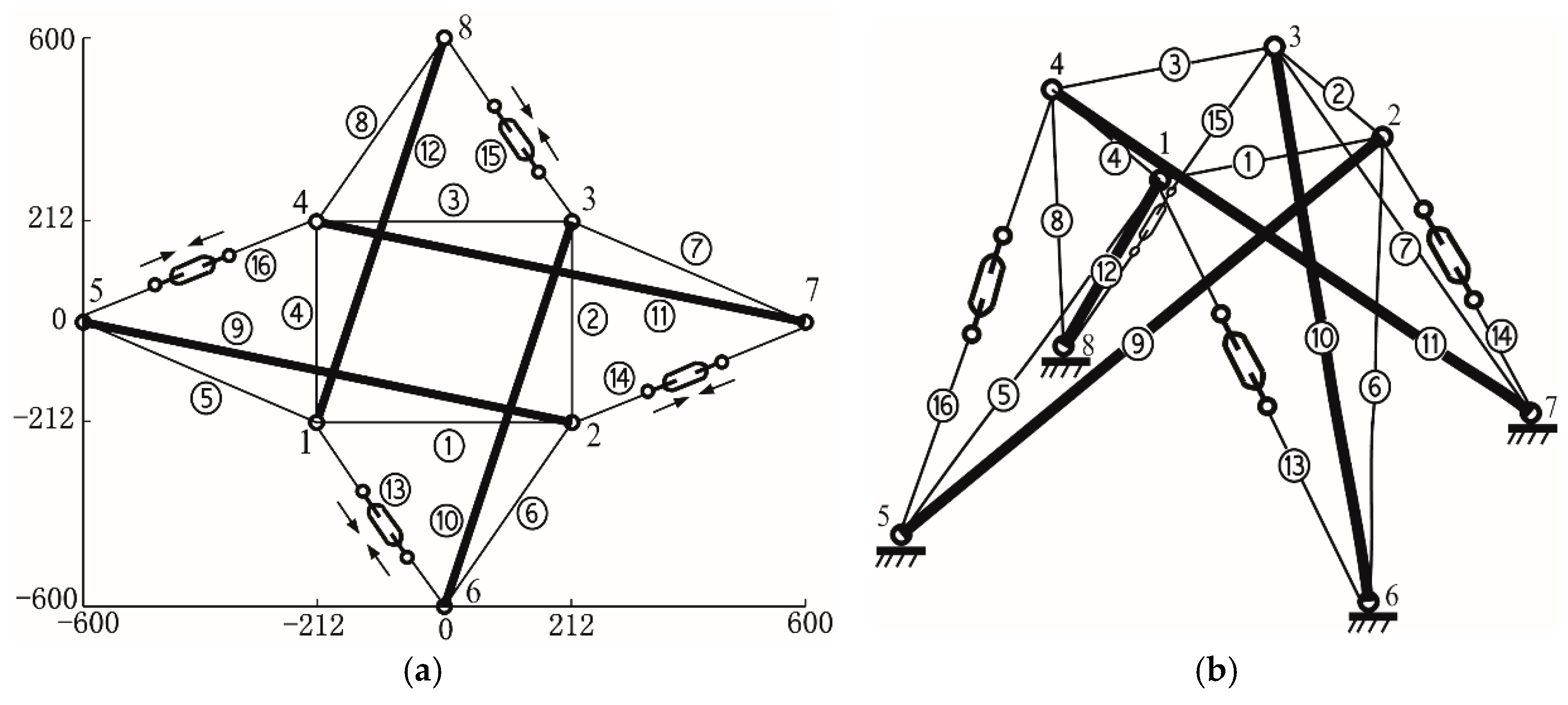
Situation 2: four cables are added to connect certain pairs of nodes, as shown in
Figure 6. The added cables are assumed to be adjustable by embedding the turnbuckles, and they are shortened by 10 mm synchronously. It should be noted that the type of the structure has been changed after the increments of cables. Although the nodal degree of freedom
d is still equal to 12, the number of elements
b becomes 16 and the rank of new equilibrium matrix
A is 12. Therefore, s = 4 and m = 0 hold, which means that this system belongs to type II—statically indeterminate and kinematically determinate assemblies.
The static analyses are carried out for the above two situations, using aforementioned three methods respectively. The calculation results are listed in
Table 4 and
Table 5. It should be noted that the structure discussed herein satisfies the invariance condition to rotation around the vertical axis by a certain degree. Accordingly, the members can be divided into four groups totally, i.e., horizontal cables numbered from ① to ④, vertical cables numbered from ⑤ to ⑧, struts numbered from ⑨ to ⑫, added cables numbered from ⑬ to ⑯, because all members in each group are located at symmetrical positions—one member in each group can be transformed to any other member of that group by a proper rotational operation. Similarly, four free nodes numbered from 1 to 4 are also located at symmetrical positions, according to the rotational symmetric property of the structure. Thus, we just need to focus on the displacement results of Node 1.
It can be seen from the above two tables that for the first situation, the solutions of axial forces and displacements obtained from both Method 1 and Method 2 almost have the same level of error, and approximate the numerical solutions derived from Method 3 considering the geometric nonlinearity. For the second situation, the results given by Method 1 are still in good agreement with the numerical solutions, whereas the results derived from Method 2 are quite different from them. The reason is that, in the first situation, the product forces caused by δ
xI are relatively small compared with the ones resulting from δ
xII and, therefore, considering (like Method 1) or ignoring (like Method 2) the contribution of this part has little effect on the final results. However, when Method 2 is employed to deal with type II assemblies in the second situation, the fundamental Equations (45) and (50) are reduced to:
and
Actually, the above two formulas are the fundamental equations of traditional force method used for type II assemblies, which cannot consider the influence of initial axial forces or prestress. Therefore, the results obtained from Method 2 are irrelevant to prestress, and their calculation errors will become larger with the increase of prestress level μ. Fortunately, this inherent flaw for Method 2 has been improved in Method 1 since no redundant simplifications were made in the derivation of the unified formulas.
As to the second situation of this example, four independent states of self-stress
Si (i = 1, 2, 3, 4) can be obtained through the Singular Value Decomposition of the equilibrium matrix, each of which is formed as:
Among 16 entries of
Si, the first 12 ones correspond to the original 12 members, while the last 4 ones correspond to the 4 added cables. It is found that
Si is featured by the fact that the sum of the last 4 entries is zero, i.e., the following equation holds
Because of
, the equation
STe =
0 holds. Moreover, due to δ
q =
0, then:
From the reduced forms of Equations (45) and (50), we can get the solutions of δn = 0 and , which will keep unchanged with the variation of the prestress level μ.
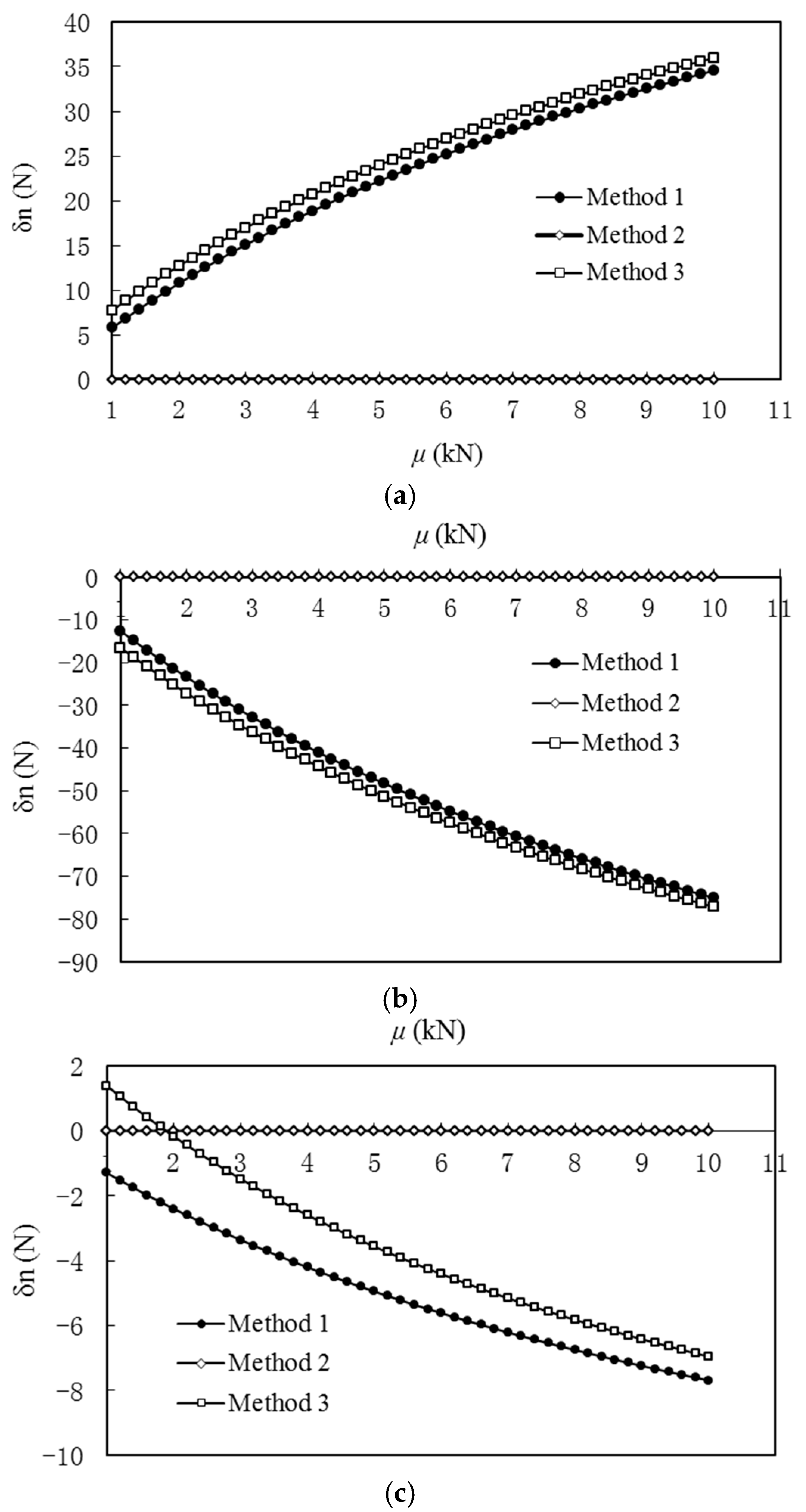
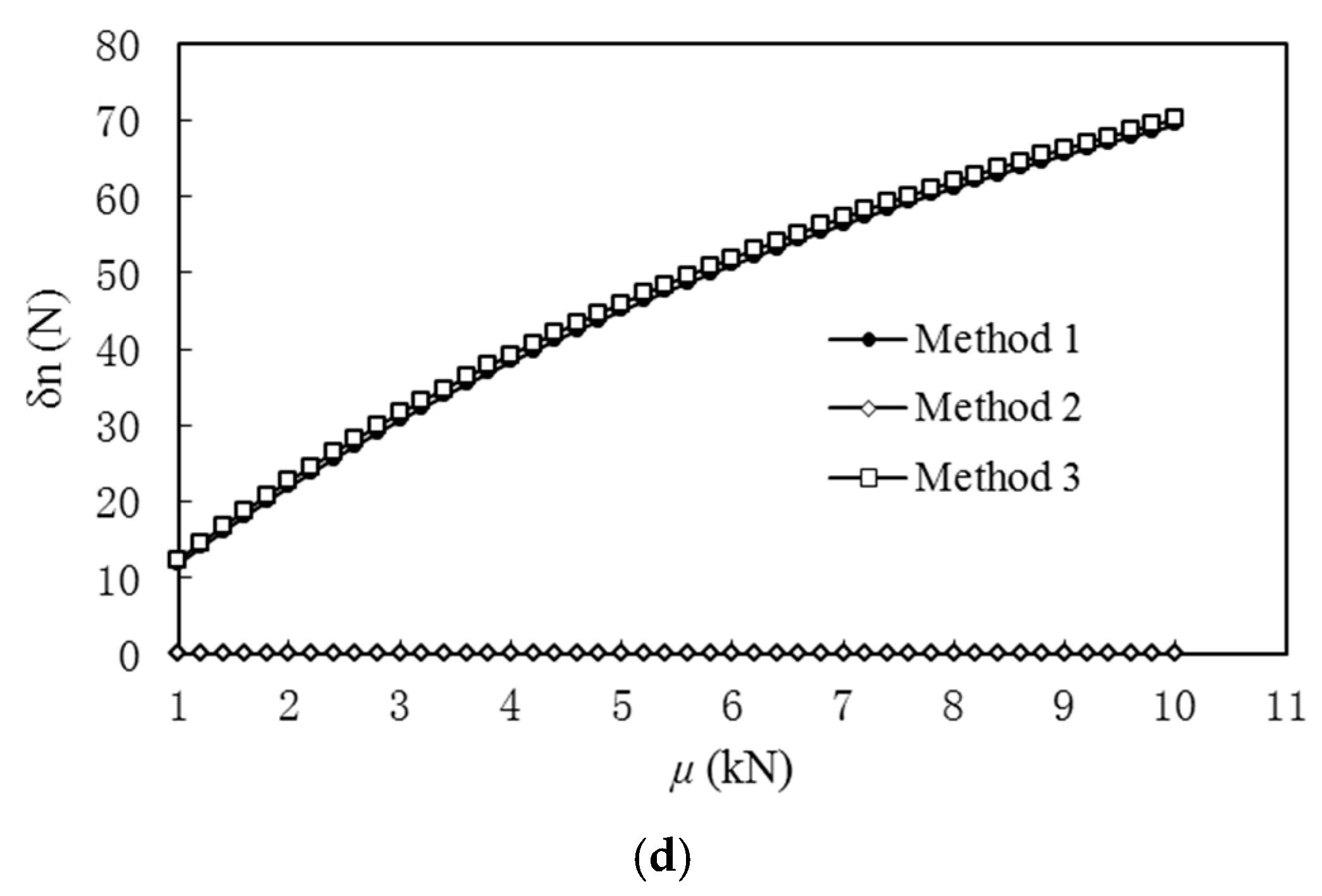
To verify the above arguments, considering that
μ is raised from 1 kN to 10 kN, the increments of the axial forces of the members are calculated for Situation 2 using the aforementioned three methods, respectively, the results of which are shown in
Figure 7. It can be seen from this figure that the solutions derived from the matrix force method are always equal to zeros, which deviate from the numerical solutions gradually with the increase of
μ. On the other hand, the method proposed in this paper is in a good agreement with the nonlinear matrix displacement method. Furthermore, the larger the initial axial forces are, the greater the structural stiffness is, the lower the nonlinearity is, and the higher the accuracy is.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}