1. Introduction
In Computer Aided Geometric Design (CAGD) and Computer Graphics (CG), Bézier curves and surfaces are not only important for modeling free form curves and surfaces, but also useful in design and geometrically presenting different products. However, it has several limitations that restrict its applications in engineering, animation, automobile industries and other disciplines. For example, once control points are given, the position of the Bézier curves are fixed relative to their control polygon. Their shapes can only be modified by adjusting the control points. If users do not prefer to change the control points, the shape parameter curves or surfaces is a good choice.
To enhance the flexibility and gaining satisfying graphics, researchers have comes up with various kind of spline curves and surfaces with shape parameter. In recent years, many scholars have paid attention to the trigonometric Bézier curves. In [
1,
2], Bashir et al. presented quadratic and rational quadratic trigonometric Bézier curves with single and double shape parameters, respectively. Xiao-qin and Han [
3] presented cubic trigonometric polynomial curves with two shape parameters that can deal preciously with circular arc, cones, cylinders and many more. Yan [
4] discussed the cubic trigonometric nonuniform spline basis functions by proving their total positivity property. Han et al. [
5] presented a cubic trigonometric Bézier curve with two shape parameters and managed to show the representation of ellipses using T-Bézier curves. The cubic trigonometric Bézier curves by [
5] are being extended to construct spiral [
6] and transition curves [
7]. Dube and Sharma [
8] presented a quartic trigonometric Bézier-like curve with one shape parameter and defined the corresponding trigonometric Bézier surfaces. Meanwhile, Han [
9] presented piecewise quartic polynomial curves with a local shape parameter. The proposed curves can approximate an ellipse from both sides. Misro et al. [
10] developed quintic trigonometric Bézier curve with two shape parameters. The proposed curve is later applied in constructing five templates of transition curves [
11].
For the design of interpolation curves, Yan [
12] constructed the trigonometric curves that can interpolate the specified data points automatically without solving equation schemes, which offer a simple and effective way of constructing interpolation curves, but these curves have only one degree of freedom. In extension to this, Li. [
13] presents a new method of curve interpolation using cubic trigonometric interpolation curves with two shape parameters. This method also automatically interpolates the given data but have two degrees of freedom. Cao and Weng [
14] introduce shape-adjustable non-uniform B-spline curves under the fixed control polygons as well as discussing some geometric properties of the curves. Misro et al. [
15] used cubic trigonometric Bézier curves with two shape parameter and develop S-shaped and C-shaped transition curve by satisfying
Hermite condition. Yang and Zeng [
16] presented the Triangular Bézier curves and surface with
n and
shape change parameters, respectively, which simplified the work of Chenglin [
17], giving one united expression of shape change parameter and by making the geometric significance clearer. Su and Tan [
18], established quasi-cubic B-spline base curves and surface by trigonometric polynomials and shows the representation of straight lines, circular arcs, sine curves and sphere.
Moreover, Chand and Tyada [
19] studied on the shape preserving while introducing the concept of using partially blended rational cubic trigonometric fractional interpolation surfaces. Xumin and Weixiang [
20] developed method of free-form surface modeling and gave examples for its application to analyzed the effect of shape parameters over the surfaces. Hu et al. [
21] studied the continuity conditions between generalized Bézier-like surfaces with multiple shape parameters and also discuss some properties and applications of the smooth continuity by providing the modeling examples. Lasser [
22] proposed an algorithm for converting a rectangular patch of a triangular Bézier surface into a tensor product Bézier representation and also discuss the corner problem of a surface. The curves and surfaces in [
1,
2,
3,
4,
5,
6,
7,
8,
9,
10,
18,
19,
20,
21] have several specific advantages such as they inherit the positive properties of the classical Bézier curves and surfaces. Furthermore, several local shape parameters are included and make it possible to change the local shapes of the curves and surfaces without altering the control points. All these curves and surfaces are highly flexible and suitable in shape design where the shapes could be modified directly by the boundary curves, but they are non-interpolating on boundaries. In response to the existing approach, the paper aims to create local shape adjustable surfaces using a quintic trigonometric Bézier-like basis function with four shape parameters that not only possess the key properties of the classical Bézier surfaces but also have exceptional shape adjustment with and without fixing the boundary curves. Moreover, we examine the geometric continuity conditions of the two adjacent quintic trigonometric surfaces to make a smooth joint between surface patches and effect of shape parameters on surface using mean curvature nephogram are also provided. In conclusion, the applications to the surface modeling in engineering are explored together with Coons surfaces at fixed boundary curves.
The rest of the paper is organized as follows. The quintic trigonometeric Bézier basis function is defined in
Section 2. The construction of Bézier surface with shape parameter is presented in
Section 3. In
Section 4, we propose the
continuity conditions for biquintic trigonometric Bézier surfaces. Some examples of
smooth continuity between two adjacent surfaces are given in
Section 5. In
Section 6 and
Section 7, the discussion about swept and swung surfaces are given. In
Section 8, the effect of shape parameter on shape adjustable surfaces showing with mean curvature nephogram is presented. Finally, conclusion and suggestions are provided in
Section 9.
3. Construction of Biquintic Trigonometric Bézier Surface with Shape Parameter
If the control points
are given, the parameteric surface
is called the tensor product biquintic trigonometric Bézier surface of degree
m and
n with
and
are the shape parameters of the basis functions
and
, respectively as defined in Equation (
2).
Remark 1. Biquintic trigonometric Bézier surface with shape parameter in Equation (3) inherited most of the properties of classical Bézier surface including, boundary property, convex hull, symmetric and invariance. Remark 2. The shape of the surface in Equation (3) can be adjusted flexibly by changing the shape parameters subject to the condition that its control points remain unchanged. Figure 2 shows biquintic trigonometric Bézier surface with different shape parameters values. In
Figure 2, the biquintic trigonometric Bézier surfaces have 36 control points and 4 shape parameters
and
. In
Figure 2a–d, the values of shape parameter
,
and
,
are decreasing in the range of
which is changing in both the
u-direction and
v-direction. The biquintic trigonometric Bézier surface moves away from its control nets as shape parameter decreasing.
Figure 2e,f displays the surfaces when changes are made only in the
v-direction. The surface moves away from one side without affecting the other side when one shape parameter changes. However, shape parameters in the biquintic trigonometric Bézier surface provide the flexibility in surface modeling either in one or both directions.
5. Examples of G2 Smooth Continuity between Two Biquintic Trigonometric Bézier Surfaces
In order to achieve the
smooth continuity between two biquintic trigonometric Bézier surfaces, let control points
with order
, and shape parameter values
for the first
surface. Then by using the conditions
,
,
, we will yield
according to (
7). The two surfaces achieved the
continuity by possessing the common boundary.
Next, give the value to the normal vector
, the shape parameter
,
and the order
to the surface
, the control points
,
can be found using Equation (
14) to achieve
continuity. Lastly, the control points
can be obtained by Equation (
20). The remaining control points of the second surface
can be chosen freely and the
continuity between the two biquintic trigonometric Bézier surfaces can be achieved in
u-direction.
Figure 3 shows the
smooth continuity between two biquintic trigonometric Bézier surfaces
and
in green and red color, respectively.
Figure 3a,b displays surface graphs with the scaling factor
equal to 1 and 2. Conveniently, the influence of
on the shape of the surfaces is analyzed. All the shape parameters of the both surfaces are the same and are equal to one. If the shape parameters are fixed and the value of scaling factor
increases or decreases, the control points
(or
) move away (or closer to) the control points
(or
). On the other hand, when scaling vector
is fixed and the values of shape parameters are increased or decreased, the surfaces move closer or away from the control net as shown in
Figure 3c–f.
6. Constructing Swept Surfaces with Shape Parameters
This section will discuss creating a surface by sweeping a section curve along the trajectory curve. Suppose that
is a section curve with shape parameters
and
is a trajectory curve with shape parameters
in the three dimensional space. Then, the equations of these two curves are given by
In general, the swept surface can be obtained by sweeping a section curve
along the trajectory curve
, shown in
Figure 4. The general form of swept surface is given by [
25]
where
is a
matrix as a function of
v. In this paper, we are using the type of swept surface with
is an identity matrix for each
v and
is just translated by
. Therefore, the general form will then be written as
The swept surface constructed with control points
from Equation (
35) with shape parameter is
Figure 5 shows the translation of swept surfaces at different values of shape parameters. In
Figure 5, the section curve
and the trajectory curve
are obtained by constructing quintic trigonometric Bézier curves. The shape parameters of these two curves are
and
, respectively. The control points of the section curve are
and the control points of trajectory curve are
.
Figure 5a–c shows the translation of swept surfaces when the section curve is fixed but the shape of trajectory curve is modified by selecting different shape parameter values.
Figure 5d–f shows the translation of swept surfaces when the trajectory curve is fixed and the section curve is modified by selecting different shape parameter values.
Figure 5g–l shows the translation of swept surfaces by modifying both the section curves and the trajectory curve with random choice of shape parameter. One can adjust the swept surface locally and globally by fixing one curve and altering the shape parameter values of other curves or by altering both curves.
7. Constructing Swung Surfaces with Shape Parameters
This section mainly focuses on the representation of swung surfaces by a tensor product of trigonometric Bézier curve by introducing shape parameter into swung surfaces. A swung surface is an extension to the surface of revolution in which profile curve performs a complete rotation about the axis governed by a trajectory curve. Let
be a profile curve and trajectory curve in the
and
planes, respectively where
and
are their control points. By denoting the nonzero coordinate functions
,
and
,
of the curves
and
, respectively, we define the swung surface by [
25]
where
(
) is an arbitrary scaling factor.
Remark 3. Geometrically, the swung surface in Equation (38) is obtained by swinging the profile curve about the z-axis and at the same time scaling it in the x- and y-direction according to , shown in Figure 6. Furthermore, the Equation (38) can be transformed into a Bézier surface aswhere for and are the control points. Figure 7 shows the effect of scaling factor
on the surface in the
x- and
y-directions, while
Figure 8 shows the effect of shape parameters on profile curve and trajectory curve in a swung surface with a fixed scale factor
. In
Figure 8, the profile curve
and the trajectory curve
are obtained by using two quintic trigonometric Bézier curves. The shape parameters of these two curves are
and
, respectively. The control points of the section curve are
, and the control points of trajectory curve are
.
8. Effect of Shape Parameters on Surface Using Mean Curvature Nephogram
In this section we will discuss the effects of shape parameters on the surface. The changes of the surface will be evaluating using mean curvature nephogram. In many design processes, the surface detail could be modified carefully in depth via altering the shape parameters. The change in surface shape can be described by the changes of mean curvature. Therefore, in this research the mean curvature source is used to show the shape differences of a surface.
In order to apply this idea to display the effect of shape parameters, two types of surfaces will be applied. Non-fixed boundary curves such as tensor product surfaces and fixed boundary curves such as Coons surfaces patches will be use to investigate the shape difference of the surfaces. The first type of surfaces are discussed in the example below. In advanced process of modelling design such as automobile body parts, where the boundary curves should be fixed, the shape adjustment of surfaces using shape parameters plays a great significance. Therefore, the modelling process of surfaces with fixed boundary curves can be done using Coons patch. The detailed discussion of the second type of surfaces are given in
Section 8.1.
Figure 9 shows the effect of shape parameter on biquintic trigonometric Bézier surfaces. When the four boundary curves are not fixed (interpolated with the quintic trigonometric Bézier curves), the tensor product is taken between quintic trigonometric Bézier curves with four shape parameter, then, the resulting surfaces are shown in
Figure 9. In
Figure 9a,b, the shape parameters
and
are valued 1,
and
modifying in the range
, any change in
and
will only effect one direction of the surface shown with mean curvature as illustrated in
Figure 9. While in
Figure 9c,d the shape parameters
,
and
,
arbitrarily alter their values in the range
, and the shape is modified in both direction. We can see that the effect of shape parameter is only visible in the boundaries of the surface while the effect is about negligible at the inside part of the surface, which is shown with mean curvature nephogram.
8.1. Coons Patch
Coons patch are biparameteric surfaces defined by 4 parametric boundary curves that allow to fill inside of the patch using boundary curves as follows:
where
(
) is the traditional quintic Bézier basis functions:
The curves in Equation (
40) have to satisfy certain compatibility, particularly at the their vertex:
and
. The vertex position within the patch could be calculated with Equation (
42):
and
are the blending function with
and
. In matrix form the Equation (
42) can be written as
The basis function of quintic trigonometric Bézier curves are given in Equation (
2), where
. By using control points
and the basis functions of quintic trigonometric Bézier, a special surface is established.
is a surface with quintic trigonometric basis functions in the
v-direction and traditional Bézier basis functions in the
u-direction. When
and
are valued as 1, the boundary curves
and
of
interpolate the traditional Bézier curve (the blue curves) as shown in
Figure 10a. The surface
is defined as:
Similarly, another special surface
in
Figure 10b is a surface of quintic trignometeric basis functions in its
u-direction and traditional Bézier basis functions in its
v-direction is defined as:
Moreover, four new quintic trigonometric Bézier curves
and
are generated at basis function
given in Equation (
2). However, a new bilinearly blended Coons patch
T in
Figure 10c is constructed by the four new quintic trigonometric Bézier curves
and
as:
The final surface
in
Figure 10d has the characteristics of both bilinearly blended Coons surface and quintic surface is defined as a biquintic-Coons surface based on quintic trigonometric Bézier basis function and is constructed as:
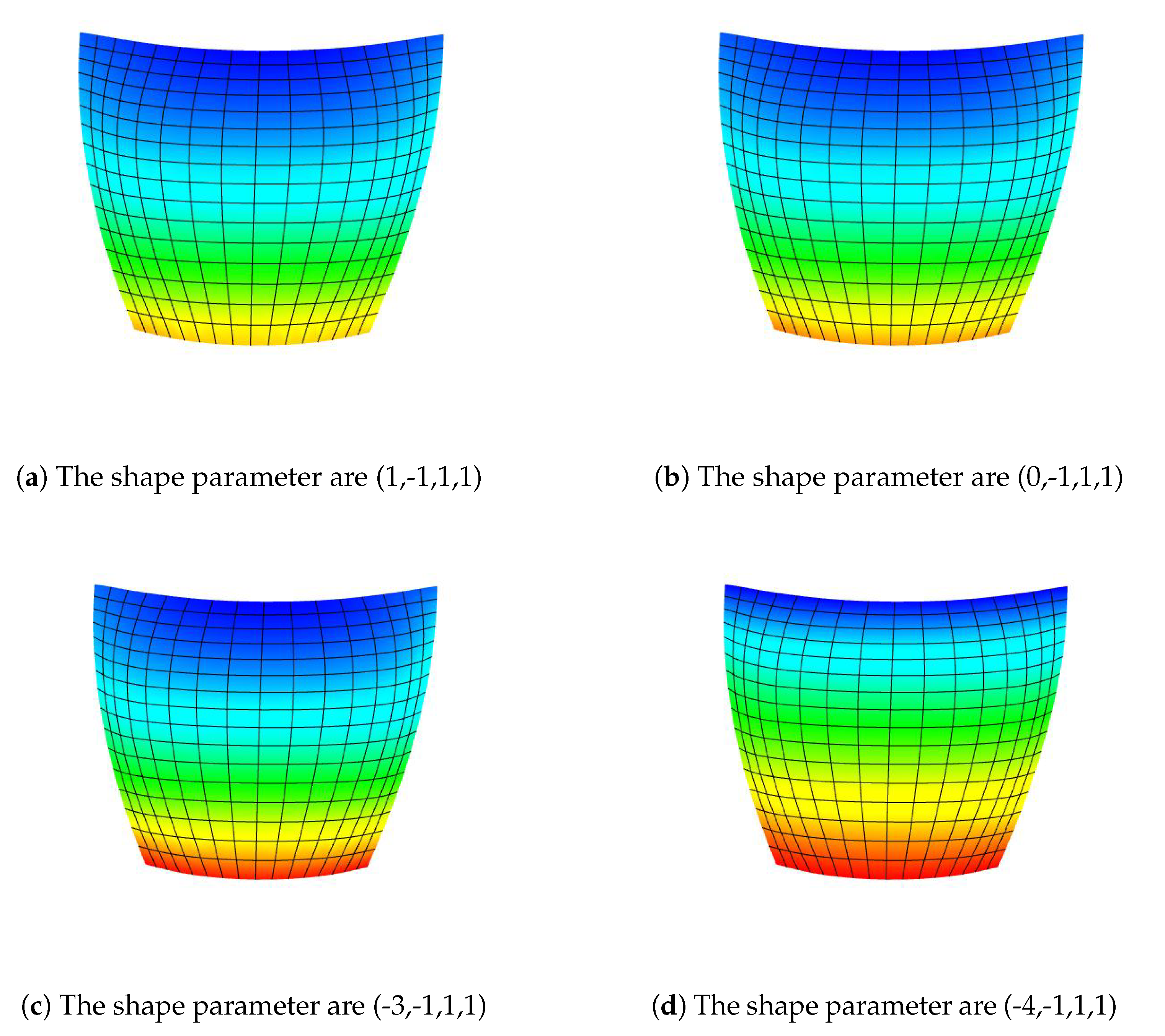
Figure 11 shows the effect of shape parameter on shape adjusting surfaces with mean curvature when the four boundary curves are fixed (interpolated with traditional Bézier curves), while the inside of surface shape is changed according to the changes in shape parameter values.
Figure 11a–d, the value of shape parameters
and
are equal to one, but value of
is changing in the range of
and
has a value of
. Similarly, we can get more results by altering the values of
and also by changing parameter values
and
by fixing the parameter values in the
u-direction.
9. Conclusions
In this paper, we present the shape adjustable surfaces using quintic trigonometric Bézier basis function and study the effect of adjustable shape parameters on the shape of surfaces. The work contains the following two aspects. Firstly, we discuss the theory of constructing the generalized Bézier surface, swept surface and swung surface using a quintic trigonometric Bézier curve with four shape parameters. Then continuity conditions for the biquintic trigonometric Bézier surfaces are derived and the impact rules of the shape parameters on the splicing surface are assessed. Furthermore, examples are given to visually analyze the effect of shape parameters on different types of surfaces. Secondly, we adopted the mean curvature nephogram to show the effect of the shape parameter at the inside of the surface. In addition to this, we construct the Coons surfaces that have the characteristic of both the traditional Bézier curve and quintic trigonometric Bézier curve and show the effect of altering the shape parameter values with fixed boundary curves. This type of surface has a great significance in advance modeling such as in the automobile industry.
Cubic trigonometric polynomial and NURBS usually can construct surfaces with some restrictions and limitations due to the control point need to be alter to get desired shape. In this paper, quintic trigonometric Bézier curve with shape parameters demonstrated smooth surface by possessing the similar properties as cubic trigonometric polynomial and NURBS. The position of control points can be fixed by using this method and at the same time the shape of the surface can be varied.
However, future work is suggested to be done involving the construction of more complex surfaces by inheriting all the geometric properties of the traditional Bézier curve with smooth joining of the quintic trigonometric Bézier curves.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}