3.1. Parameter Learning to Optimize Basic Parameters of EBRB System
In the generation of traditional EBRB system in
Section 2, the values of basic parameters are usually given by experts, which have a certain subjectivity, and are therefore impossible to ensure the high accuracy of the EBRB system. Therefore, a parameter learning model is introduced to improve the EBRB system. Considering that the basic parameters in the EBRB system include indicator weights, utility values of referential values for all input indicators and consequents for consequent attribute, the corresponding constraints can be defined as follows:
- (1)
For the indicator weight of the
ith input indicator, the constraint conditions are as follows:
- (2)
For the utility values of the
ith input indicator, the constraint conditions are as follows:
where
lbi and
ubi is the lower and upper bounds of
ith input indicator.
- (3)
For the utility values of the output indicator, the constraint conditions are as follows:
where
lb and
ub is the lower and upper bounds of output indicator.
For the objective function of parameter learning of EBRB system, suppose that there are
T input-output data <
xt,
yt> (
t = 1, …,
T) and the inference result of the EBRB system for each data is
, the objective function is defined as follows:
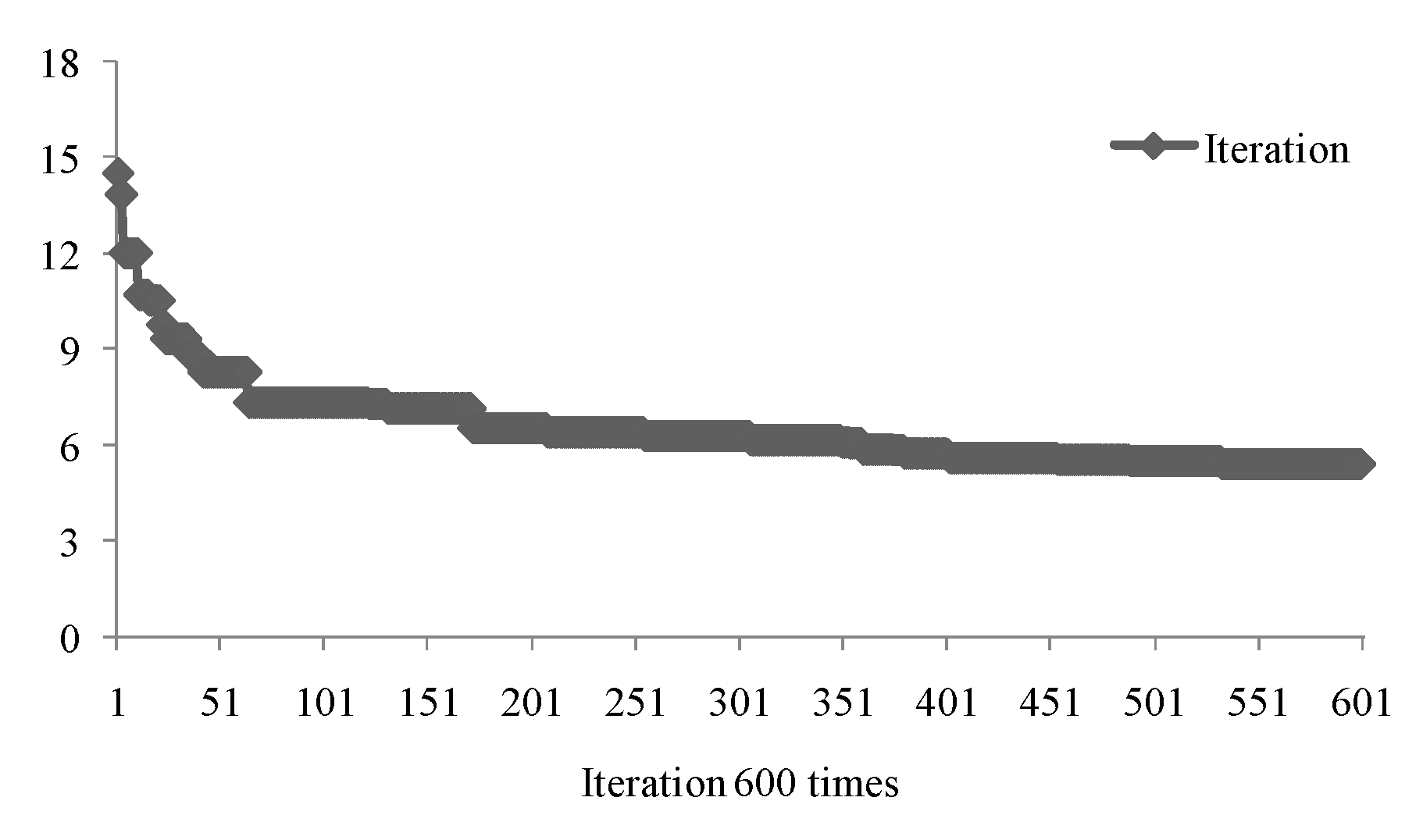
In order to obtain the minimum values of the objective function shown in Equation (17) under the constraints shown in Equations (10) to (16), a differential evolution (DE) algorithm in further introduced and the detailed processes are as follows:
Suppose that the basic parameters in the EBRB system are optimized through
C individuals and
S iterations in the DE algorithm, in which the basic parameters in the
cth individual and the
sth iteration can be expressed as:
where
denotes the indicator weights of
i (
i = 1, …,
M) input indicator;
is the utility value of
Ai,j;
is the utility value of
Dn;
denotes the
kth basic parameter;
K denotes the total number of basic parameters. When
ubk and
lbk are the upper and lower bounds of
kth parameter
, the initial values of basic parameters can be obtained:
Next, in the
sth iteration, for any individual
, three different individuals
,
and
are randomly selected from C individuals, and then a new individual
is generated:
where
F is the cross factor,
CR is the variation factor.
Then, in the sth iteration, when the parameter value of
exceeds the constraint conditions, the value is re assigned according to Equation (19). The value of the objective function shown in Formula (17) is calculated by the parameter value
, and finally
is updated by:
Finally, when the total number of iterations is equal to the given number of iterations, the minimum objective function value is taken as the optimal value and the corresponding basic parameters as the optimal parameters of EBRB system.
3.2. Cost Prediction Using the Improved EBRB System with Technological Constraints
After obtaining the EBRB system improved by the parameter learning model, technological constraints are considered to improve the rule inference process of EBRB system, which is used to produce an output for replying any given input data. Based on the original rule inference of EBRB system in 14, the rule inference process under technological constraints has the following steps:
Step 1: To calculate technological innovation factors for the EBRB system. Suppose that
P technological innovation indicators are used to calculate technological innovation factors and their historical data are
zk,p (
k = 1, …,
T;
p = 1, …,
P). Due to the incommensurability among these
P indicators, the historical data of these indicators need to be normalized to eliminate dimensional units using
where
is the normalized value of the
pth (
p = 1, …,
P) indicator in the
kth (
k = 1, …,
T) data;
denotes that
zk,p is the positive value which is larger the better;
denotes that
zk,p is the negative value which is larger the better.
Afterwards, the normalized values are used to calculate the technological innovation factors of the
kth data, denoted as
TIFk, by:
Step 2: To consider technological constraint in the EBRB system. When the technological innovation factors
TIFk (
k = 1, …,
T) are considered in the EBRB system, an extended dataset can be generated by combining the original data <
xk,
yk> (
k = 1, …,
T) and the technological innovation factors
TIFk, namely <
xk,
TIFk,
yk>. On the basis of the new dataset and taking the technological innovation factor as a new input indicator of the EBRB system, an EBRB system with the consideration of technological constraint can be generated, according to
Section 2 and
Section 3.1.
Step 3: To calculate the activation weight of each rule. Suppose that a new input data vector including technological innovation factor, denotes as
x = (
xi;
i = 1, …,
M + 1), is provided for the EBRB system, and the input data can be transformed into belief distribution
using Equations (3) and (4). Afterwards, the activation of the
kth (
k = 1, …,
L) rule can be calculated as follows:
where
is the weight of the
ith indicator;
is the weight of the
kth rule;
denotes the individual matching degree of input indicator for the
kth rule and it can be calculated as follows:
where
is the belief degree of the
kth rule in referential value
Ai,j;
denotes the distance between input data and rule, then the active weight can be calculated:
Step 4: To integrate all activated rules based on the evidence reasoning (ER) algorithm. According to the analytical ER algorithm, the rule which has activation weight
wk > 0 should be integrated by:
Next, when the utility values for
N consequents of output indicators are {
u(
Dn);
n = 1, …,
N}, the predicted cost for the environmental governance in the transportation industry can be obtained by:
For the above-mentioned cost prediction process using the EBRB system, it is worth noting that, when future input data are provided, the EBRB system is also able to predict the future costs used for environmental governance in the transportation industry. The detailed steps are as follows:
Step 1: To calculate the future input data of the EBRB system. Suppose that the input indicators of the EBRB system can be divided into two categories: positive and negative. The positive indicators are those indictors for maximization, such as benefit, whose values are always the larger the better. The negative indicators are those for minimization, such as cost, whose values are better when smaller. The values of the
rth positive (
r = 1, …,
M1) attribute and the
fth (
f = 1, …,
M2) negative attribute are denoted as
and
in the future the
tth (
t = 0, …,
) year. Additionally, suppose that
ar is the target change ratio of the
rth positive indicator and
bf is the target change proportion of the
fth negative indicator of the transportation industry in the future. Hence, the calculation of the future input data of the EBRB system can be obtained as follows:
Step 2: Future cost prediction with technological constraints. According to the future input data and of the transportation industry, the predicted environmental governance costs in the transportation industry can be obtained according to Equations (24) to (27).










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}