Design and Development of Sheet-Metal Elbows Using Programming with Visual Basic for Applications in CATIA

 ,
, 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
State-of-the-Art of the Existing Related Software
- Galileo [13]
- Lantek Expert [14]
- LogiTRACE [15]
- LITIO 2.0 [16]
- Plate’n’Sheet [17]
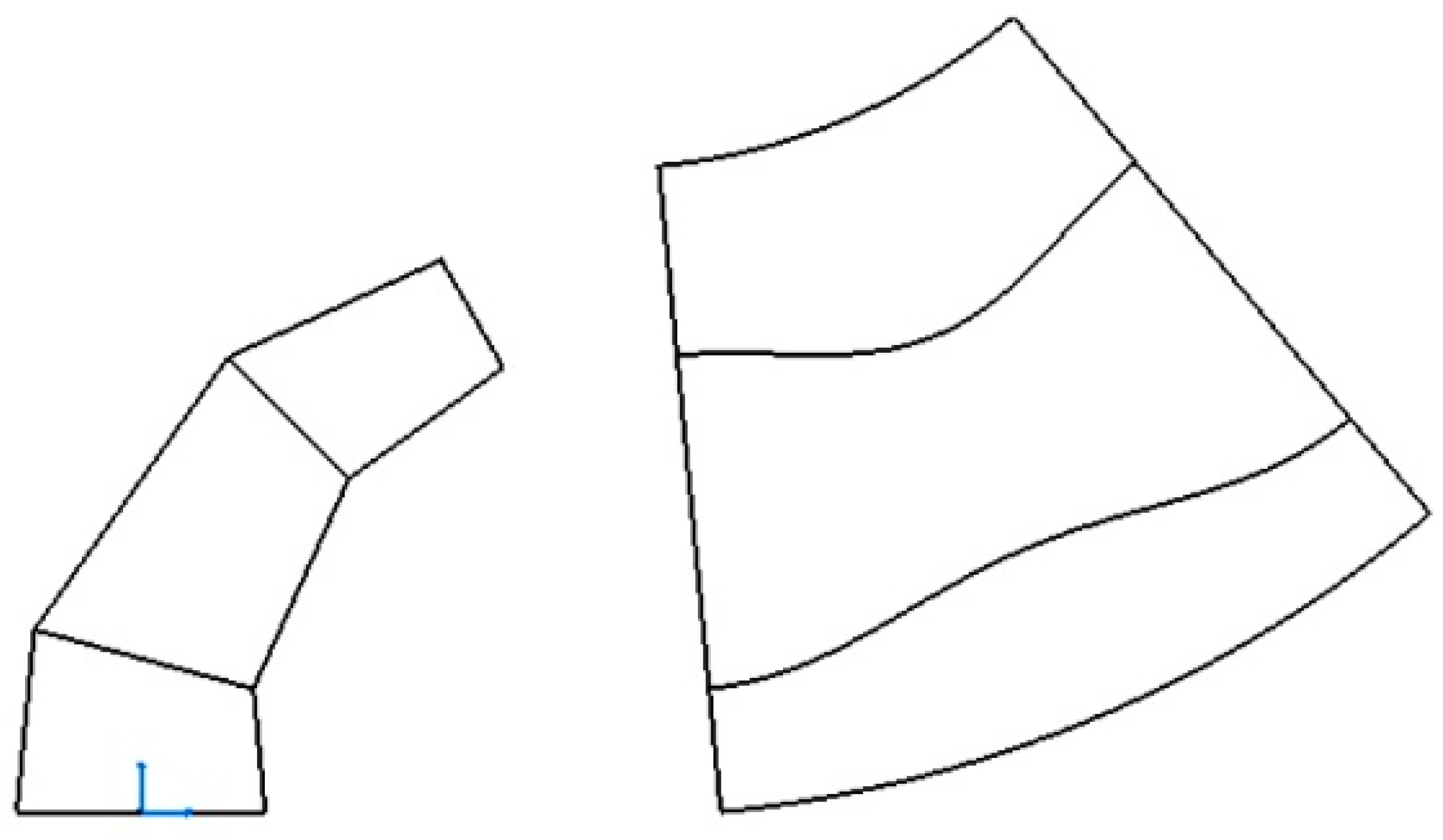
2. Sheet-Metal Elbows
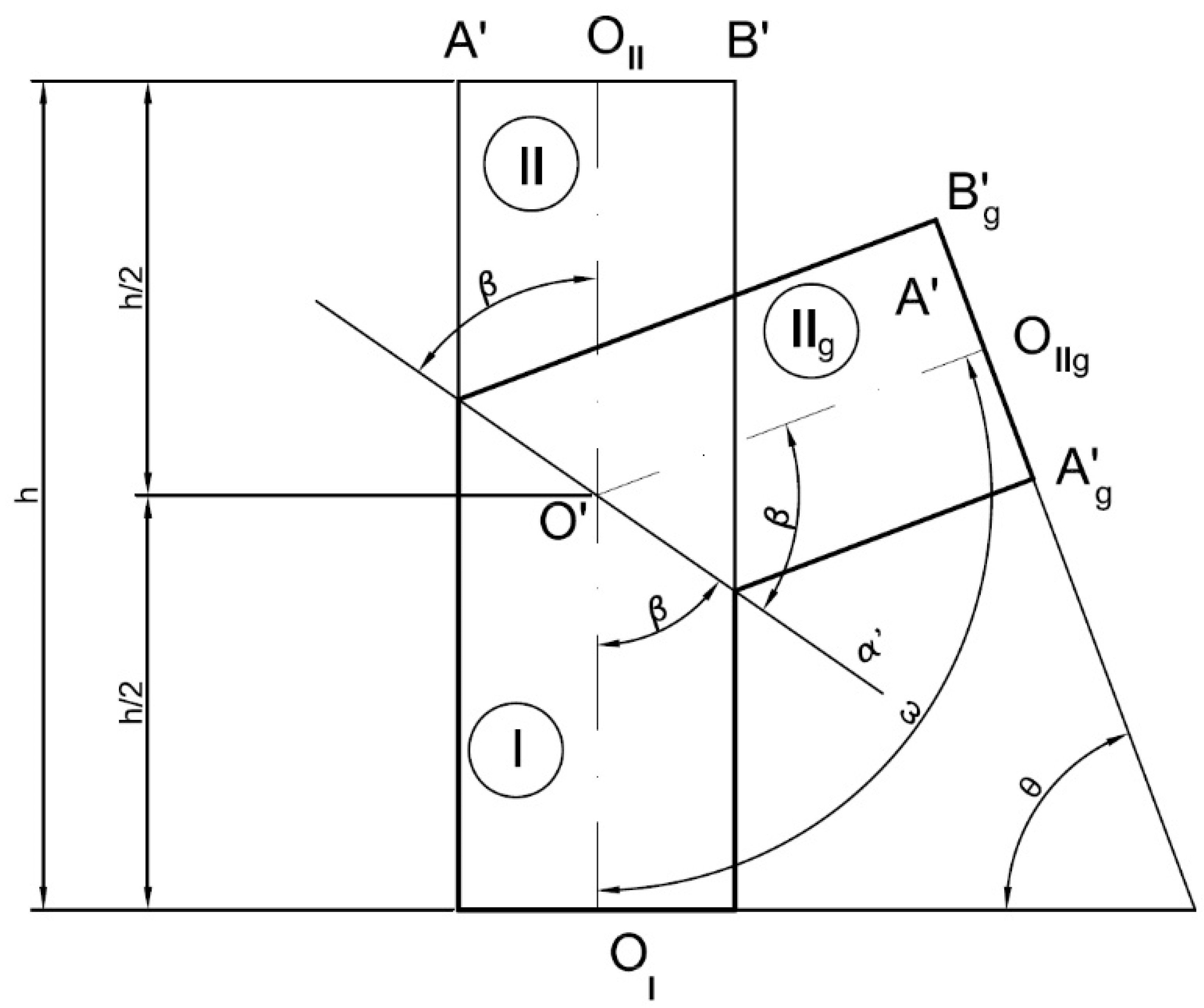
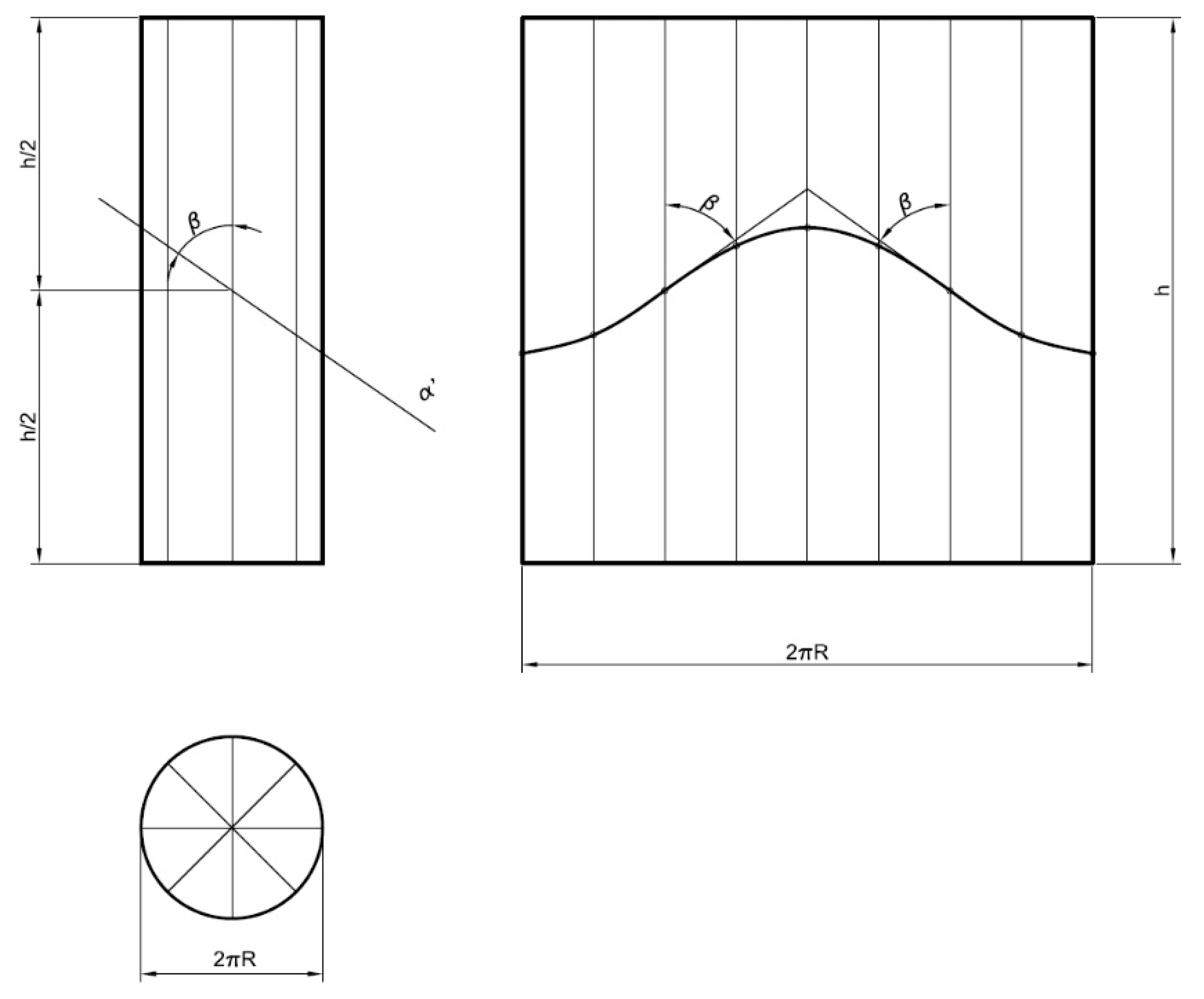
2.1. Cylindrical Elbow
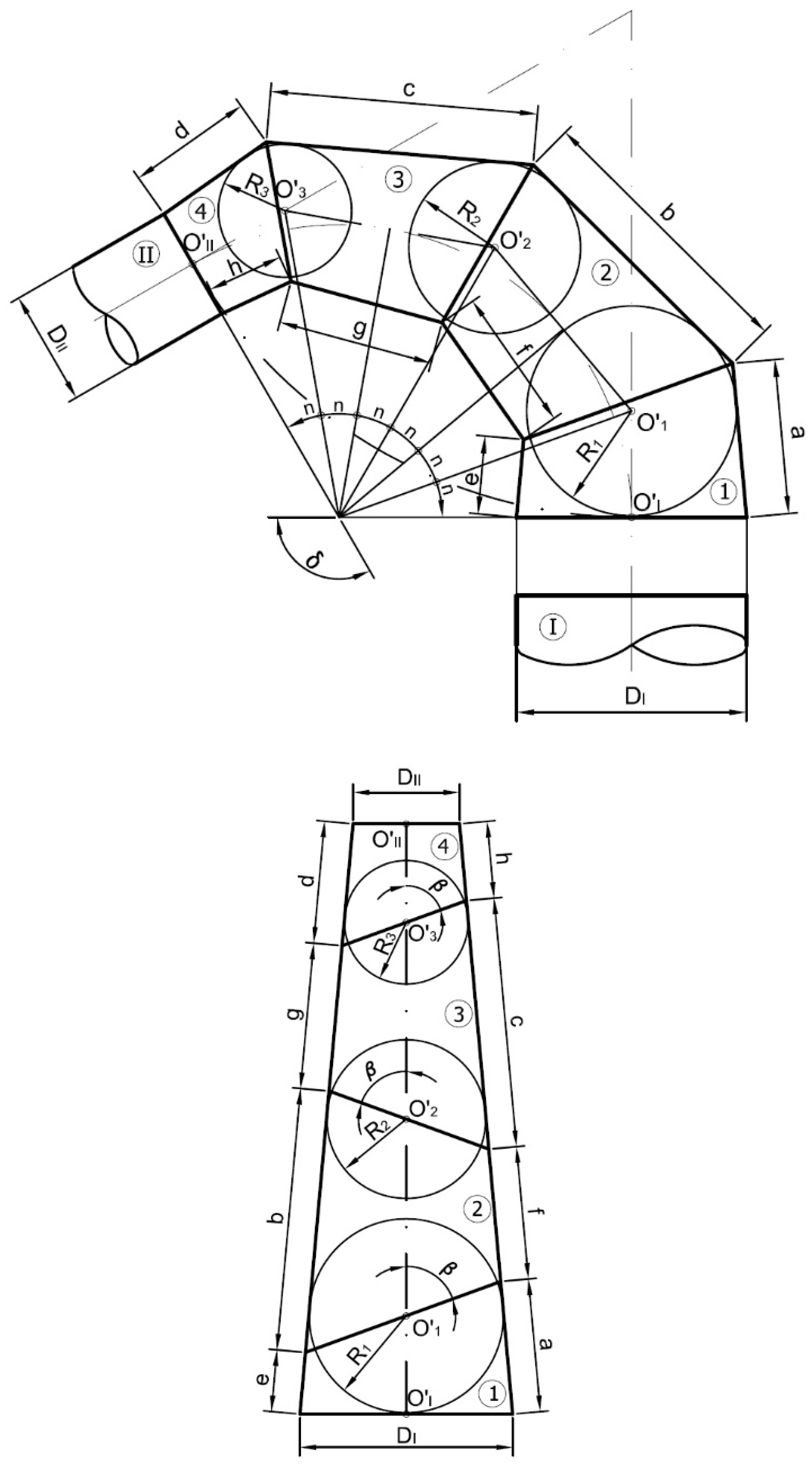
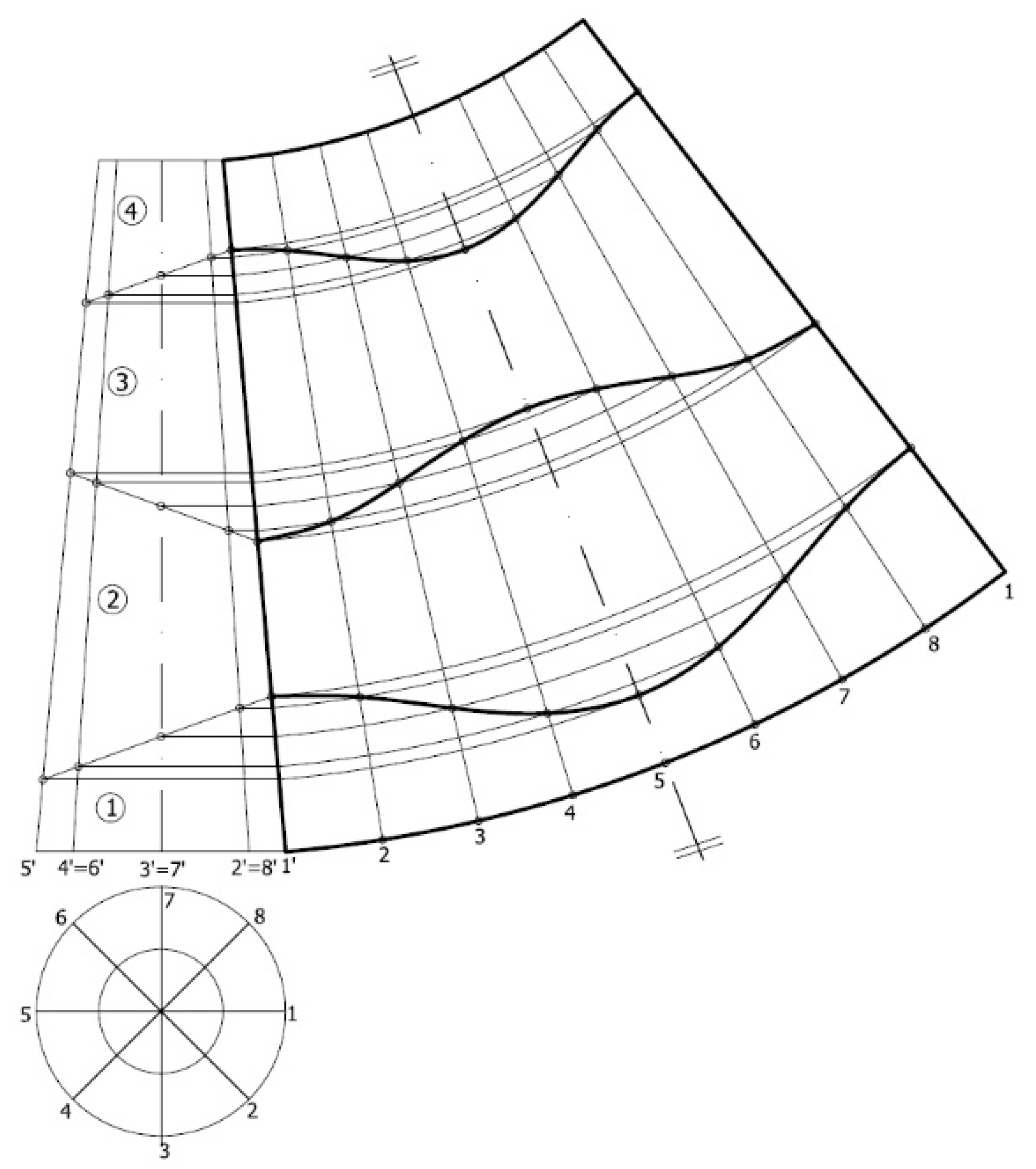
2.2. Conical Elbow
3. Material and Methods
3.1. Design and Development of Sheet-Metal Elbows in CATIA
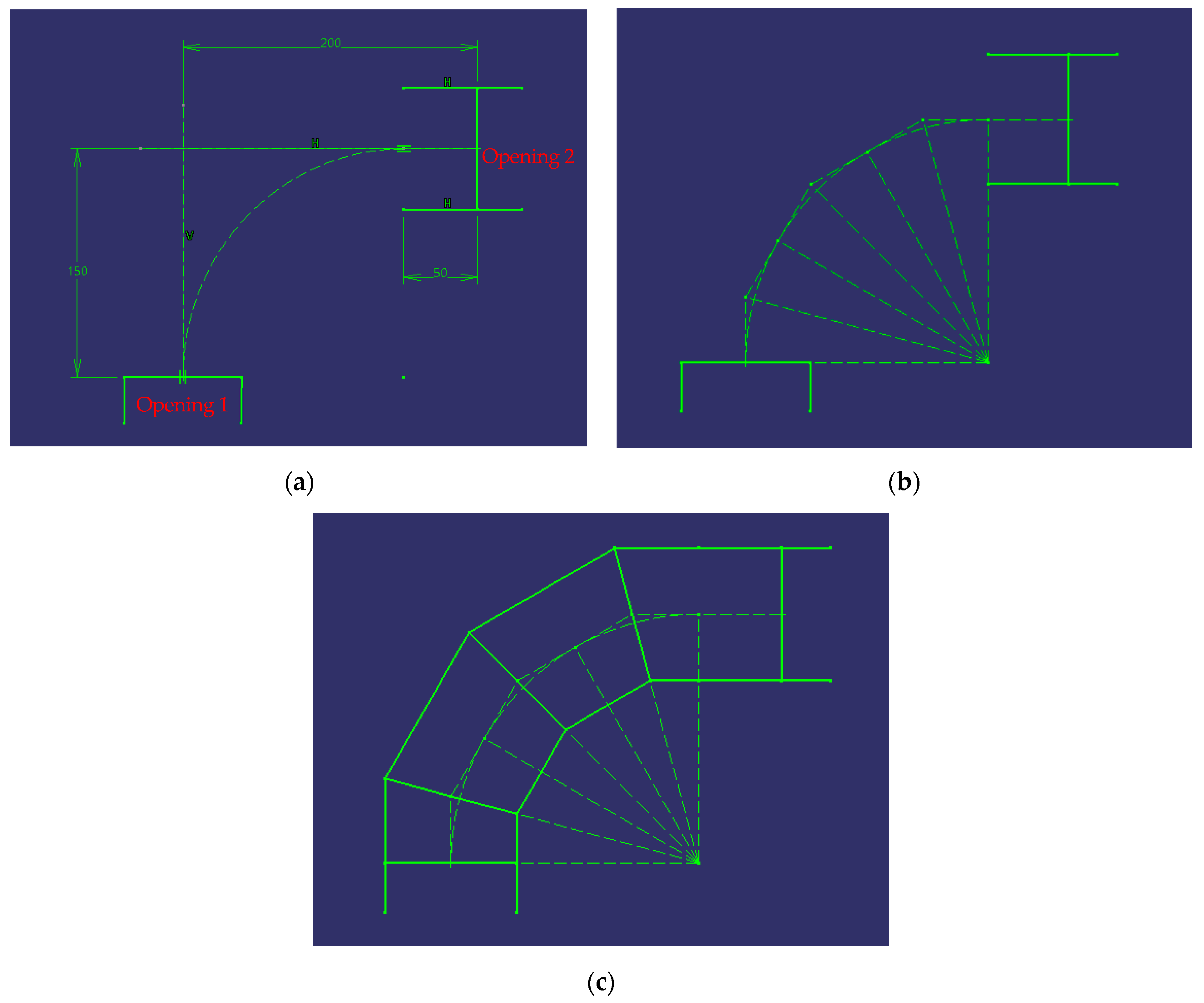
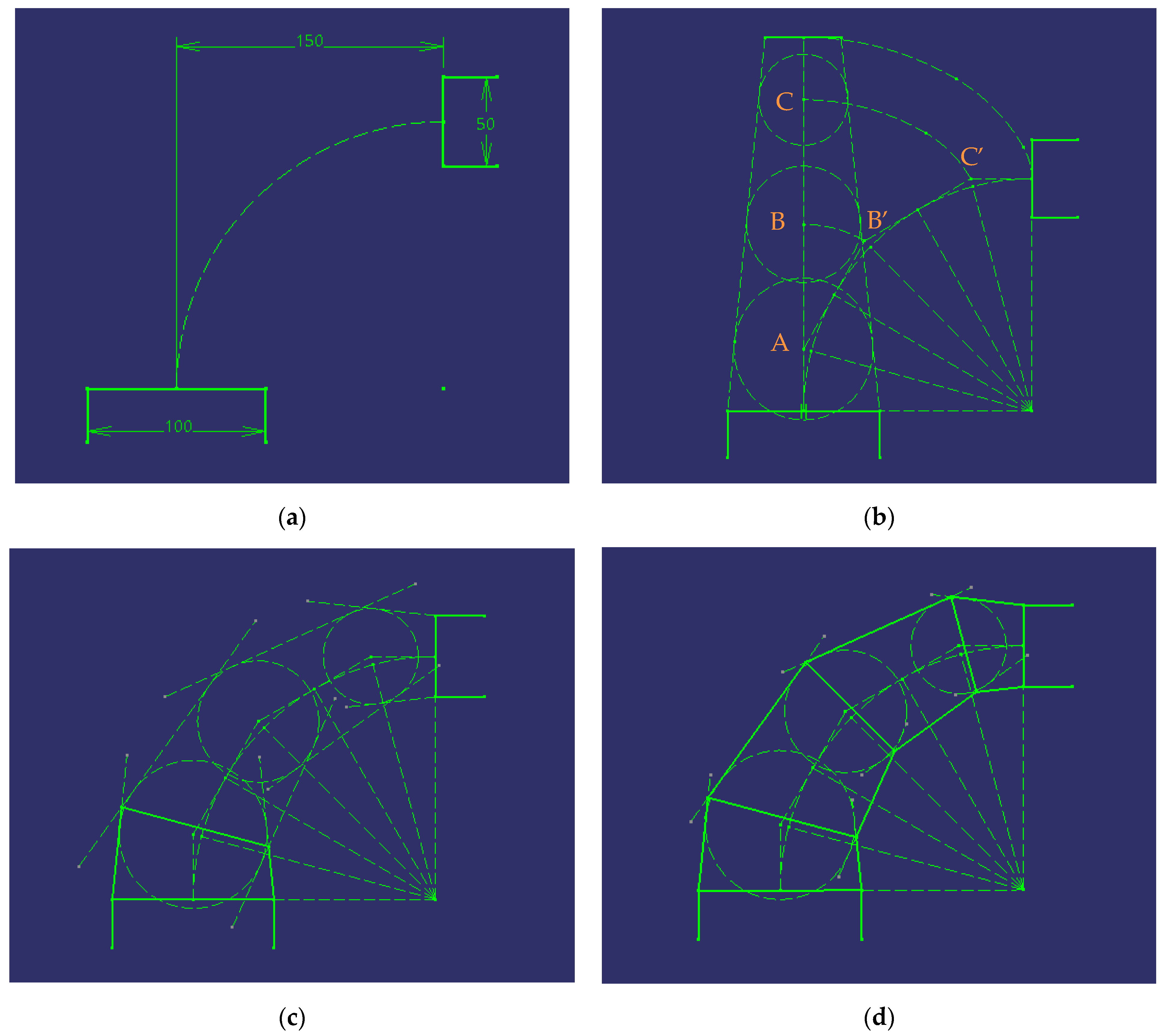
3.1.1. Cylindrical Elbows
Design
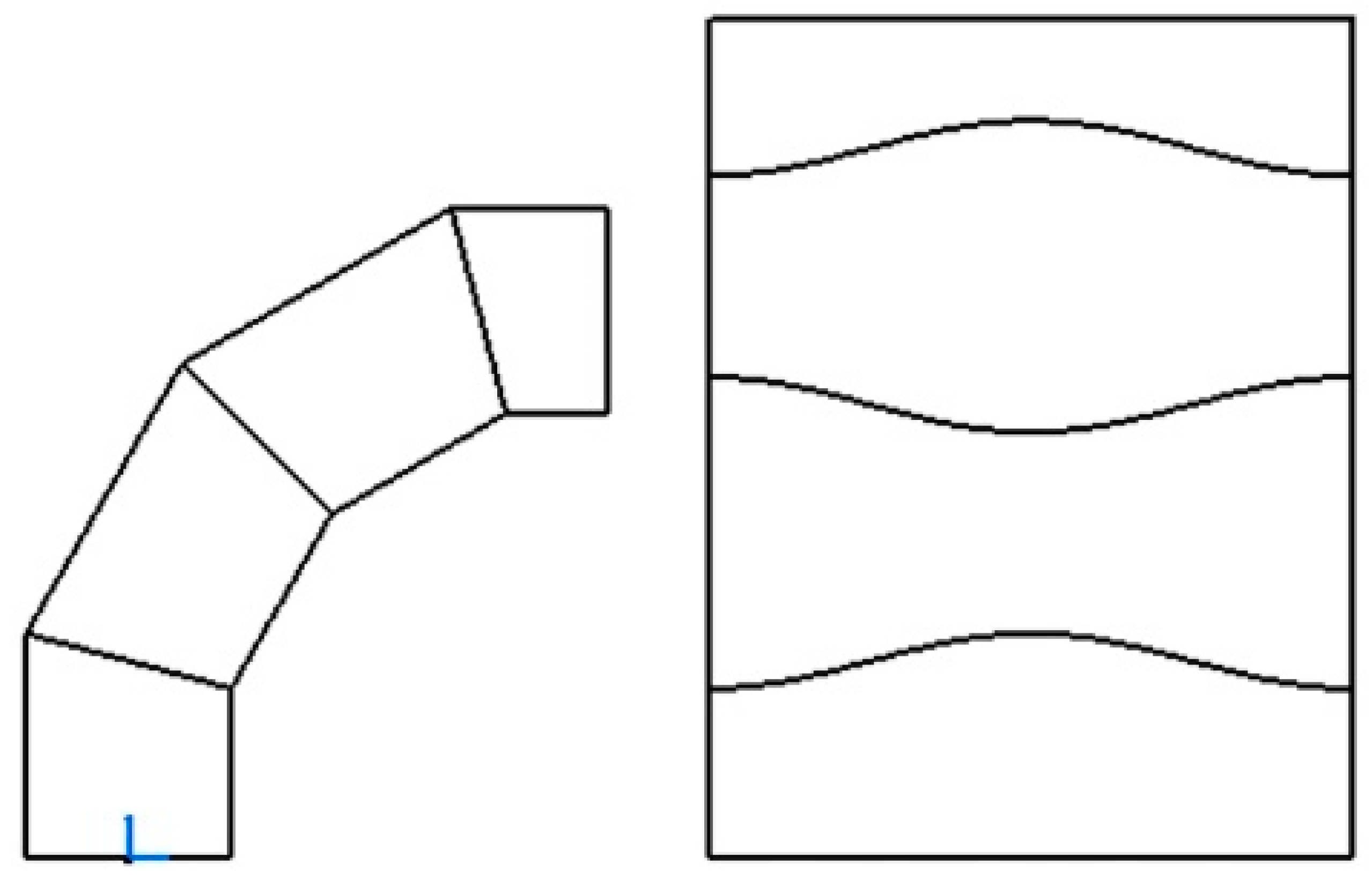
Development
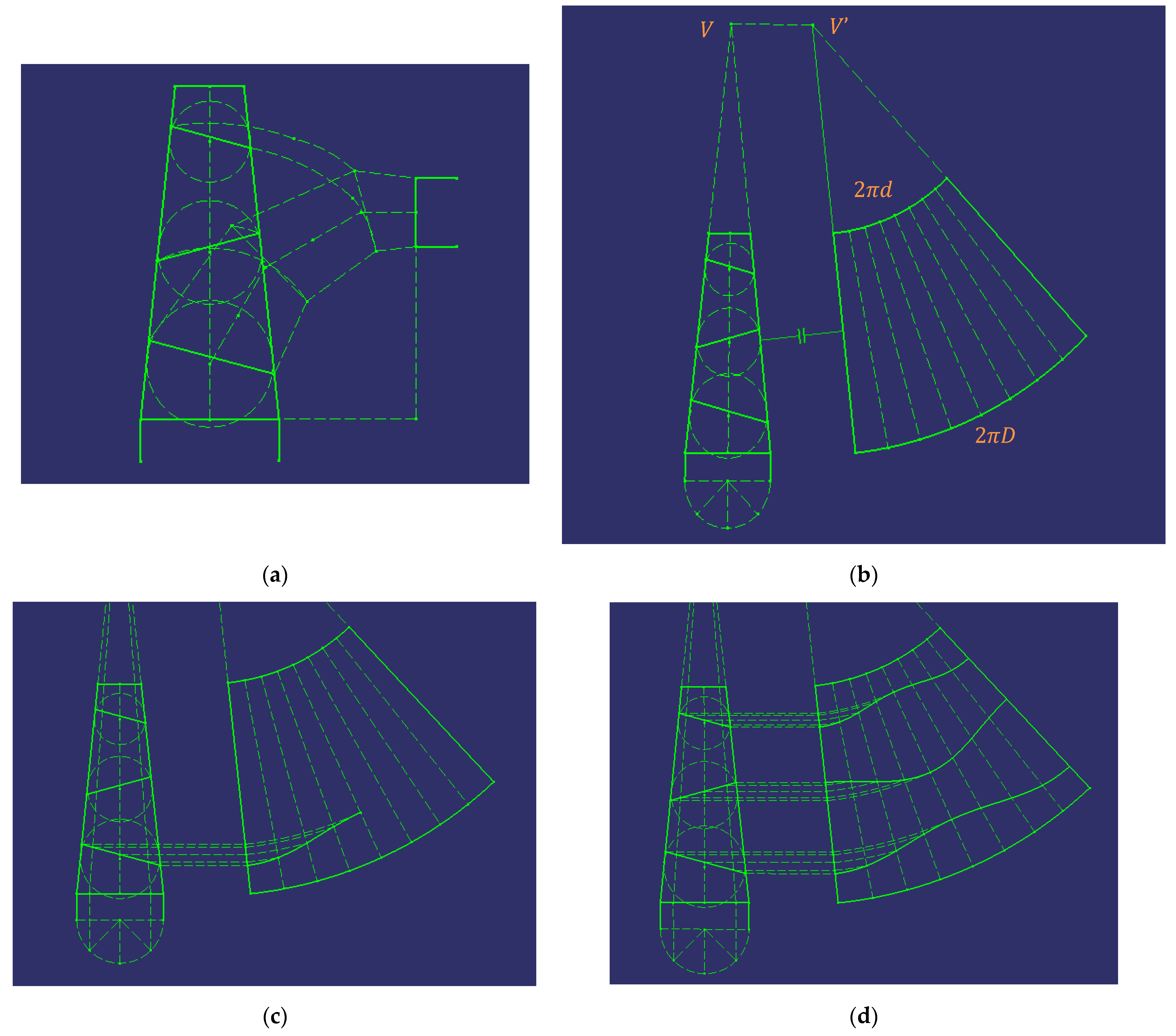
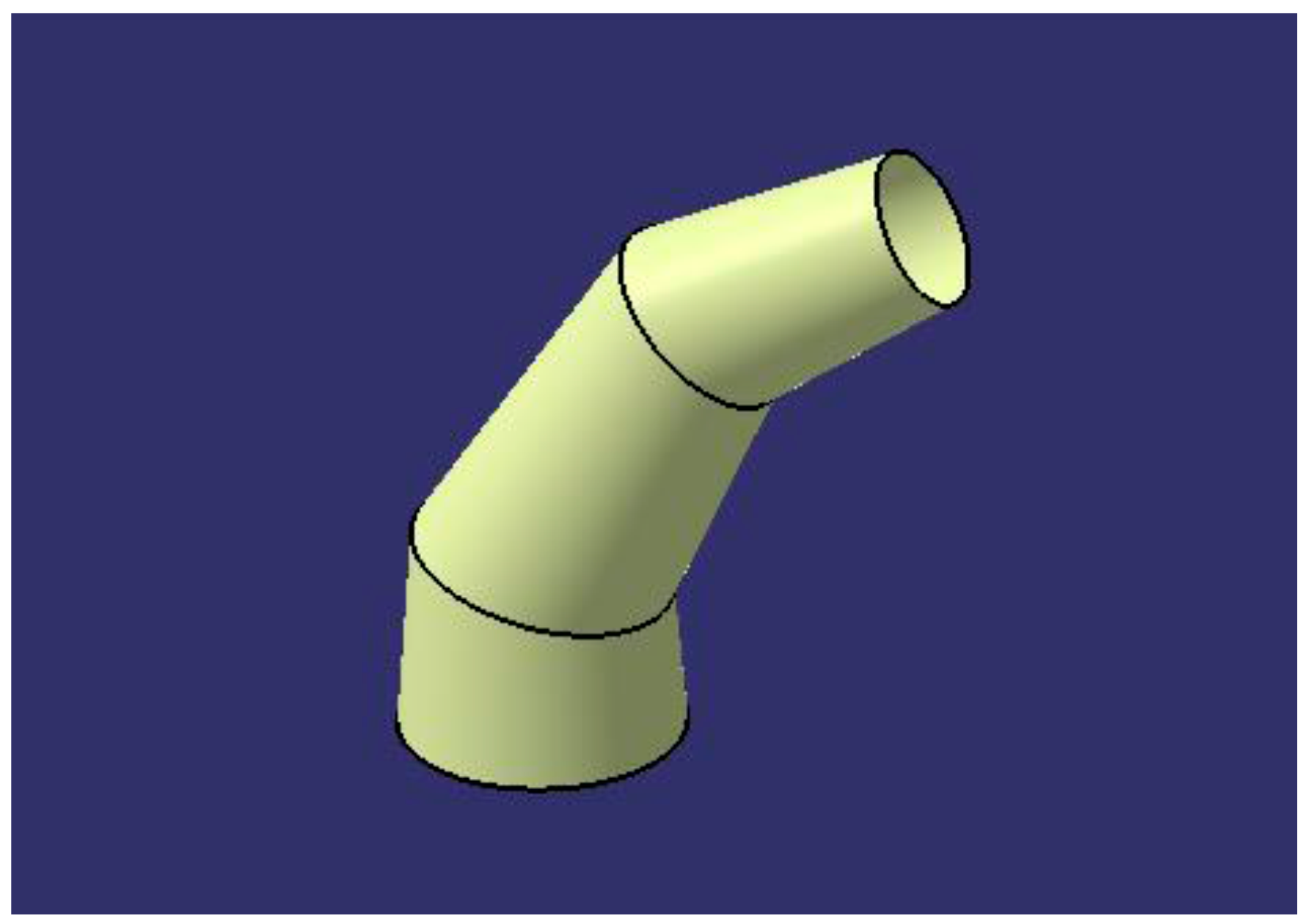
3.1.2. Conical Elbows
Design
Development
3.2. Programming Environment with Visual Basic for Applications (VBA)
3.3. Steps to Follow
3.3.1. Work Environment
3.3.2. Definition of Sketch
3.3.3. Constraints
3.3.4. CATIA ‘Wireframe and Surface Design’ Module
Extrude
Multi-Section Surface
4. Results and Discussion
4.1. Hierarchical Structure of the Application
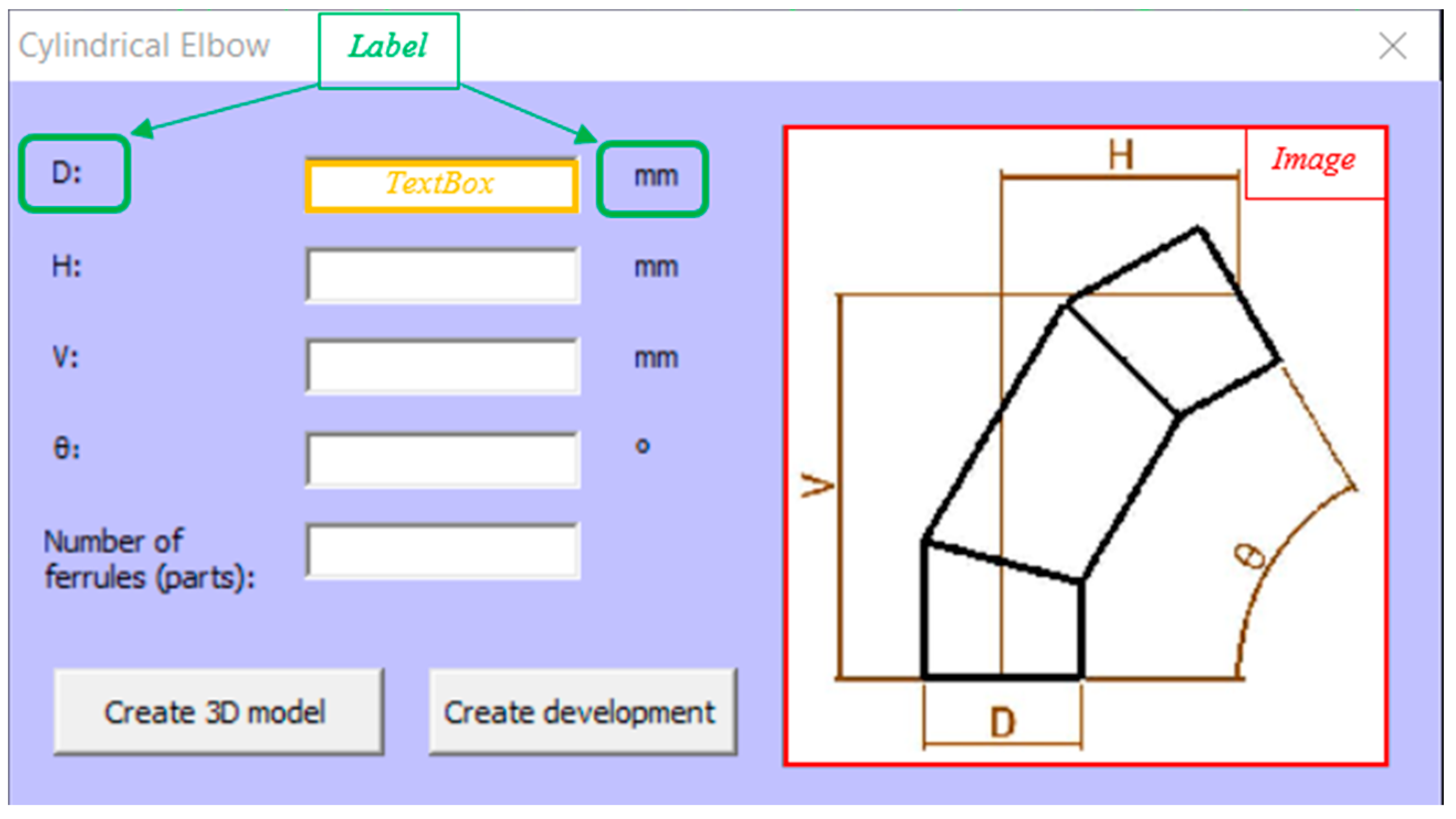
4.2. Graphical Interface
4.2.1. Cylindrical Elbow
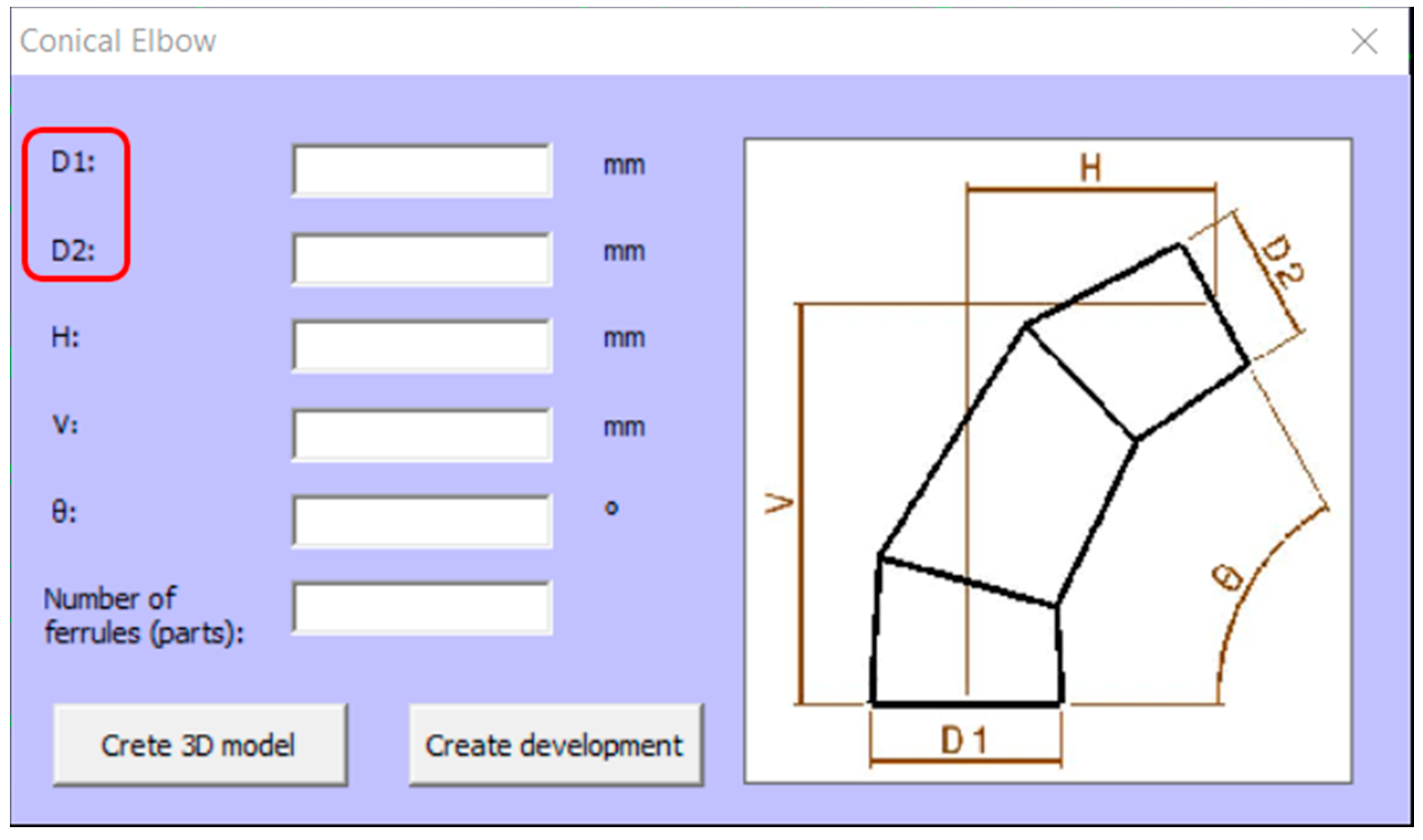
4.2.2. Conical Elbow
4.3. Analysis of Possible Errors
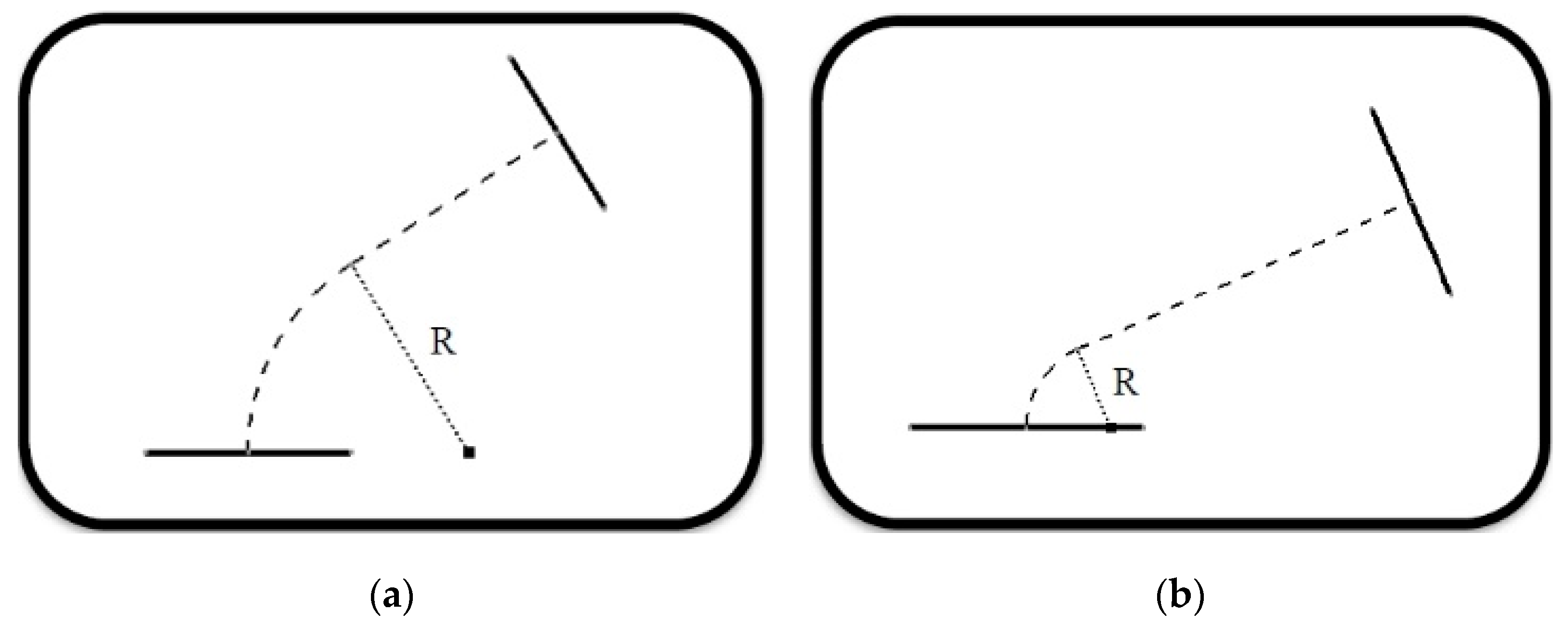
4.3.1. Angle between the Inlet and Outlet Openings of the Elbow between 5° and 180°
4.3.2. Number of Ferrules between 2 and 8
4.3.3. Diameter D1 Must Be Greater Than Diameter D2
4.3.4. Unable to Create Elbow
Case 1
Case 2
Case 3
Case 4
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Rojas-Sola, J.I.; Hernández-Díaz, D.; Villar-Ribera, R.; Hernández-Abad, V.; Hernández-Abad, F. Computer-Aided Sketching: Incorporating the locus to improve the three-dimensional geometric design. Symmetry 2020, 12, 1181. [Google Scholar] [CrossRef]
- Rojas-Sola, J.I.; De la Morena-de la Fuente, E. The Hay inclined plane in Coalbrookdale (Shropshire, England): Geometric modeling and virtual reconstruction. Symmetry 2019, 11, 589. [Google Scholar] [CrossRef] [Green Version]
- Rojas-Sola, J.I.; Galán-Moral, B.; De la Morena-de la Fuente, E. Agustín de Betancourt’s double-acting steam engine: Geometric modeling and virtual reconstruction. Symmetry 2018, 10, 351. [Google Scholar] [CrossRef] [Green Version]
- Hu, G.; Bo, C.C.; Wu, J.L.; Wei, G.; Hu, F. Modeling of free-form complex curves using SG-Bezier curves with constraints of geometric continuities. Symmetry 2018, 10, 545. [Google Scholar] [CrossRef] [Green Version]
- Escudero, I. Calderería; C.I.F.P.: Avilés, Oviedo, Spain, 2010. (In Spanish) [Google Scholar]
- Del Río-Cidoncha, G.; Martínez-Palacios, J.; Ortíz-Marin, R.; Rojas-Sola, J.I. Educational software to develop sheet metal with Solid Edge. Comput. Appl. Eng. Educ. 2009, 17, 295–304. [Google Scholar] [CrossRef]
- Romeu, M.L.G.; De Ciurana, Q. Design and manufacturing assistance tool for drawing sheet metal parts. In Proceedings of the 1st International Conference on Cooperative Design, Visualization, and Engineering, Palma de Mallorca, Spain, 19–22 September 2004; Springer: Berlin/Heidelberg, Germany, 2004; pp. 123–132. [Google Scholar]
- Tang, M.; Zhang, Z.X.; Zhang, J.Q. Visual inspection of industrial sheet metal part with CAD data. In Proceedings of the Society of Photo-Optical Instrumentation Engineers (SPIE), Wuhan, China, 15–17 November 2007; Volume 6788, p. K7880. [Google Scholar] [CrossRef]
- Cavallini, B.; Puigpinos, L. New technology for the manufacture of sheet metal parts directly from CAD files. Virtual modeling and rapid manufacturing advanced research in virtual and rapid prototyping. In Proceedings of the 2nd International Conference on Advanced Research and Rapid Prototyping, Leire, Portugal, 28 September–1 October 2005; pp. 435–439. [Google Scholar]
- Li, F.S.; Han, Z.S. Application of CAD/CAM technology in the development and lofting of complex sheet metal parts. International Conference on Mechatronics and Materials Processing (ICMMP 2011). Adv. Mater. Res. 2011, 328, 478–482. [Google Scholar] [CrossRef]
- Neto, P. Off-line programming and simulation from CAD drawings: Robot-assisted sheet metal bending. In Proceedings of the 39th Annual Conference of the IEEE Industrial Electronics Society, Vienna, Austria, 10–14 November 2013; pp. 4235–4240. [Google Scholar]
- Martins, T.W.; Albrecht, K.; Anderl, R. Automated import of XML-files containing optimized geometric data to 3D-CAD models of non-linear integral bifurcated sheet metal parts. In Proceedings of the ASME International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, V01AT02A016, Boston, MA, USA, 2–5 August 2015. [Google Scholar]
- Galileo Software. Available online: http://www.eng-pc.com/Caldereria.htm (accessed on 21 August 2020).
- Lantek Sheet Metal Solutions. Available online: https://www.lantek.com/es/caldereria-cad-cam-nesting-software (accessed on 21 August 2020).
- LogiTRACE. Available online: https://logitrace.programas-gratis.net (accessed on 21 August 2020).
- LITIO 2.0. Available online: http://www.litio.si/esp/li2index.htm (accessed on 21 August 2020).
- Plate’n’Sheet. Available online: http://www.sicam-info.com/pns.htm (accessed on 21 August 2020).
- Cobos-Gutiérrez, C.; Rodríguez-Domínguez, A.; Martín-Salinas, J. Geometría Para Ingenieros; Tebar: Madrid, Spain, 2001. (In Spanish) [Google Scholar]
- Díaz-Díaz, E. Tratado de Trazados y Desarrollos de Calderería; Marcombo: Barcelona, Spain, 2010. (In Spanish) [Google Scholar]
- Ross, E. VB Scripting for CATIA v5: How to Program CATIA Macros; Createspace Independent Pub: Scott Valley, CA, USA, 2012. [Google Scholar]
- UNE-EN 10224:2003/A1:2006e. Non-Alloy Steel Tubes and Fittings for the Conveyance of Water and Other Aqueous Liquids—Technical Delivery Conditions; UNE: Madrid, Spain, 2006. (In Spanish) [Google Scholar]




Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rojas-Sola, J.I.; del Río-Cidoncha, G.; Ortíz-Marín, R.; López-Pedregal, J.M. Design and Development of Sheet-Metal Elbows Using Programming with Visual Basic for Applications in CATIA. Symmetry 2021, 13, 33. https://doi.org/10.3390/sym13010033
Rojas-Sola JI, del Río-Cidoncha G, Ortíz-Marín R, López-Pedregal JM. Design and Development of Sheet-Metal Elbows Using Programming with Visual Basic for Applications in CATIA. Symmetry. 2021; 13(1):33. https://doi.org/10.3390/sym13010033
Chicago/Turabian StyleRojas-Sola, José Ignacio, Gloria del Río-Cidoncha, Rafael Ortíz-Marín, and José María López-Pedregal. 2021. "Design and Development of Sheet-Metal Elbows Using Programming with Visual Basic for Applications in CATIA" Symmetry 13, no. 1: 33. https://doi.org/10.3390/sym13010033
APA StyleRojas-Sola, J. I., del Río-Cidoncha, G., Ortíz-Marín, R., & López-Pedregal, J. M. (2021). Design and Development of Sheet-Metal Elbows Using Programming with Visual Basic for Applications in CATIA. Symmetry, 13(1), 33. https://doi.org/10.3390/sym13010033