
Approximation of Linearized Systems to a Class of Nonlinear Systems Based on Dynamic Linearization

 ,
,  and
and
Abstract
:1. Introduction
2. Problem Statement
3. Linearization in Bond Graph
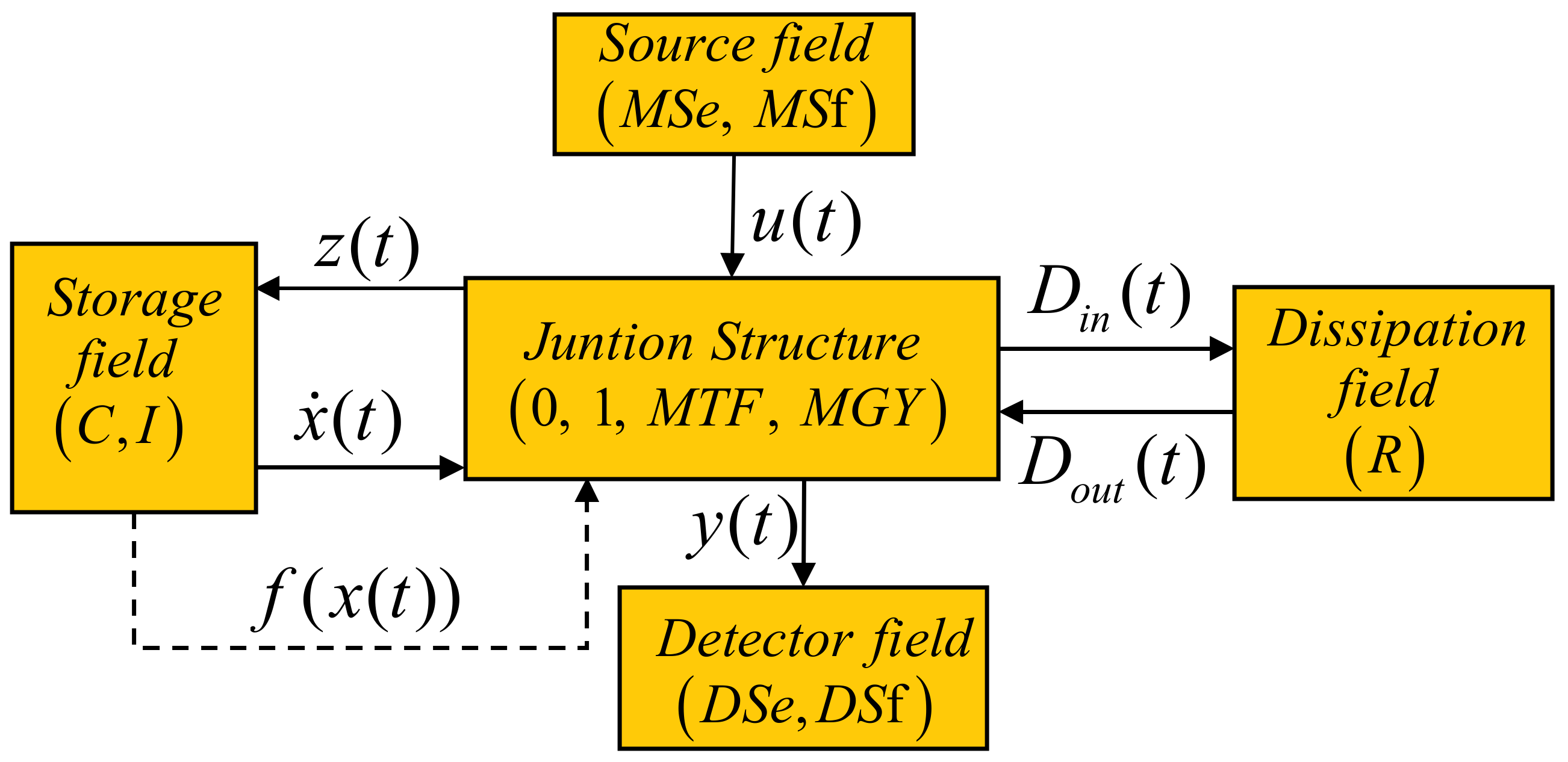
- The input obtained from a source field denoted by .
- The output obtained from a detector field denoted by .
- The state variables and the co-energy vector obtained from an energy storage field denoted by that defines the energy variables and associated with C and I elements.
- The variables and obtained from an energy dissipation field denoted by R, which are a mixture of the power variables and indicating the energy exchanges between the dissipation field and the junction structure.
- The class of the nonlinear systems obtained from the feedback between the storage field and the junction structure determines that and can be modulated by a state variables function .
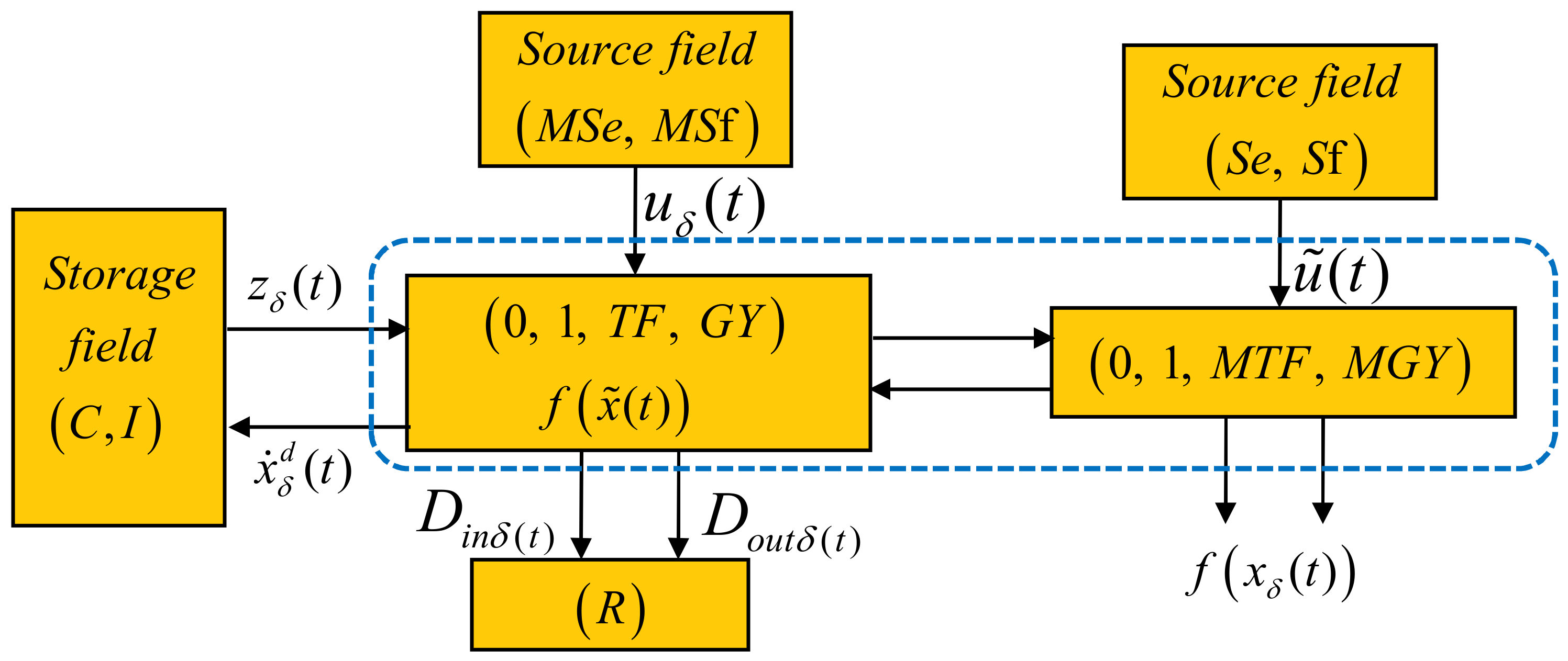
- The deviation of the state variables with the corresponding co-energy vector .
- Changes or perturbations of the inputs through modulated sources .
- The deviation relationships between junction structure and dissipation elements given by and .
- The junction structure is divided by the original junction structure with elements modulated by nominal trajectory and a new junction structure with elements modulated by state variables due to the linearization process in the physical domain.
- New sources with nominal trajectory values due to new causal paths required in linearization.
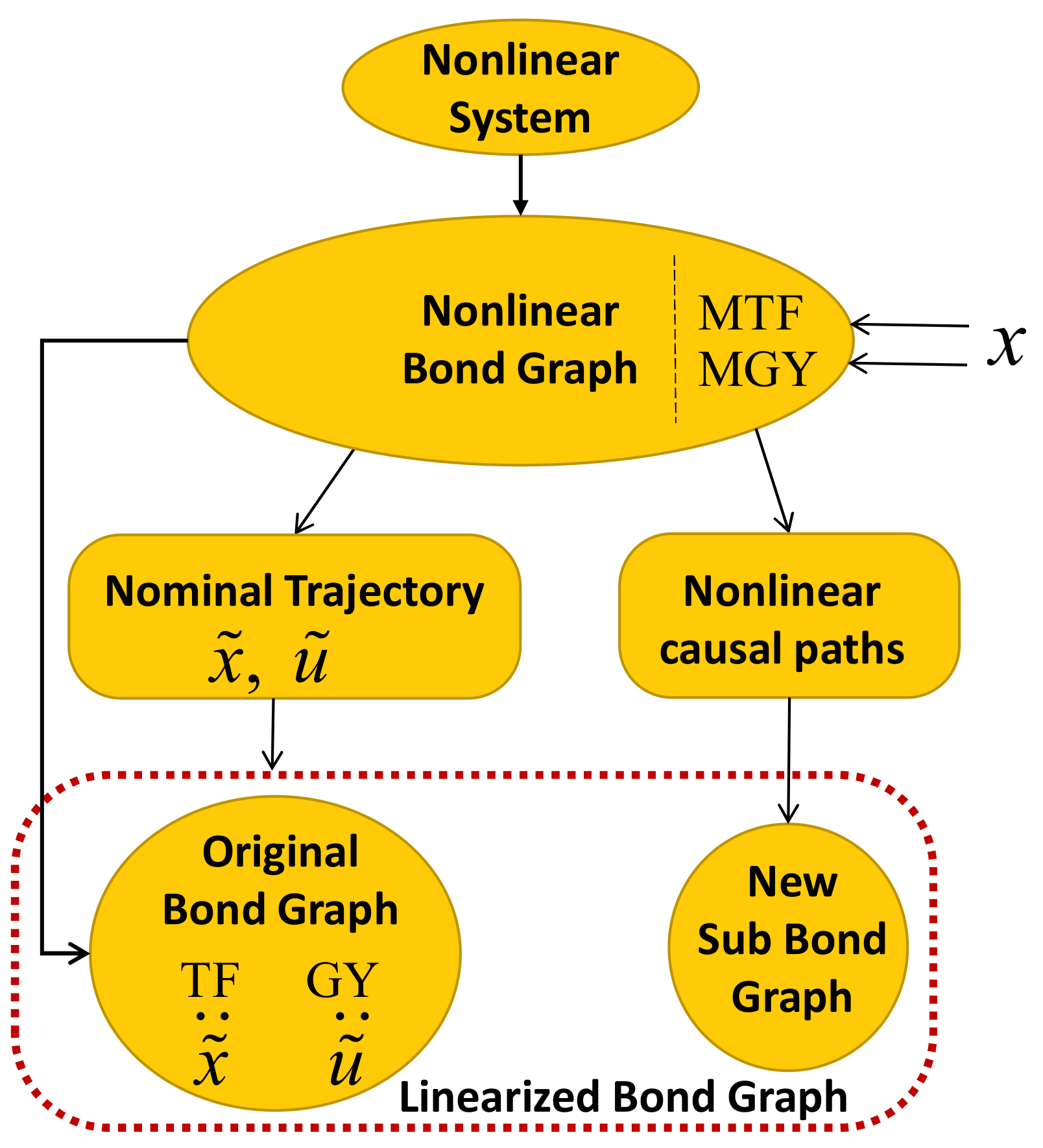
- The linearization is in the vicinity of a known nominal trajectory .
- The original nonlinear bond graph is with and/or where these two-port elements are changed by and/or modulated by , respectively.
- New causal paths are added. These nonlinear causal paths begin at the element, through one of modulated by a state variable, and arrive at . The new causal paths are introduced by replacing and by evaluated at the nominal trajectory.
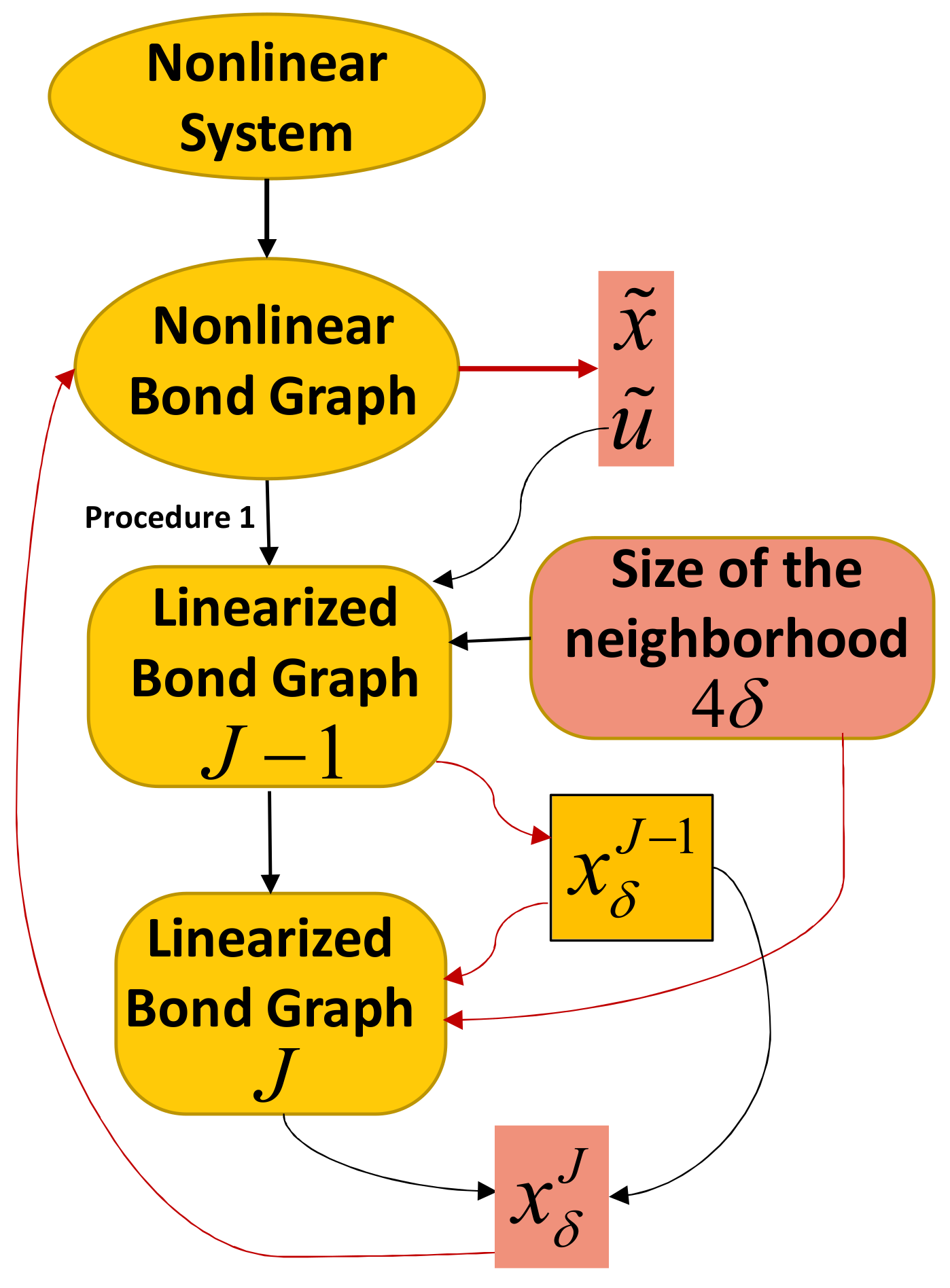
4. Approximation to Nonlinear Bond Graphs Based on Linearized Bond Graphs
- Obtain the nonlinear bond graph corresponding to the nonlinear system.
- Analyze the behavior of the nonlinear model and find an operating point that will be the first point where the system will start to be linearized.
- Determine the increase of the inputs that will be used to determine for subsequent operating points of the linearized system.
- Obtain the linearized bond graph model.
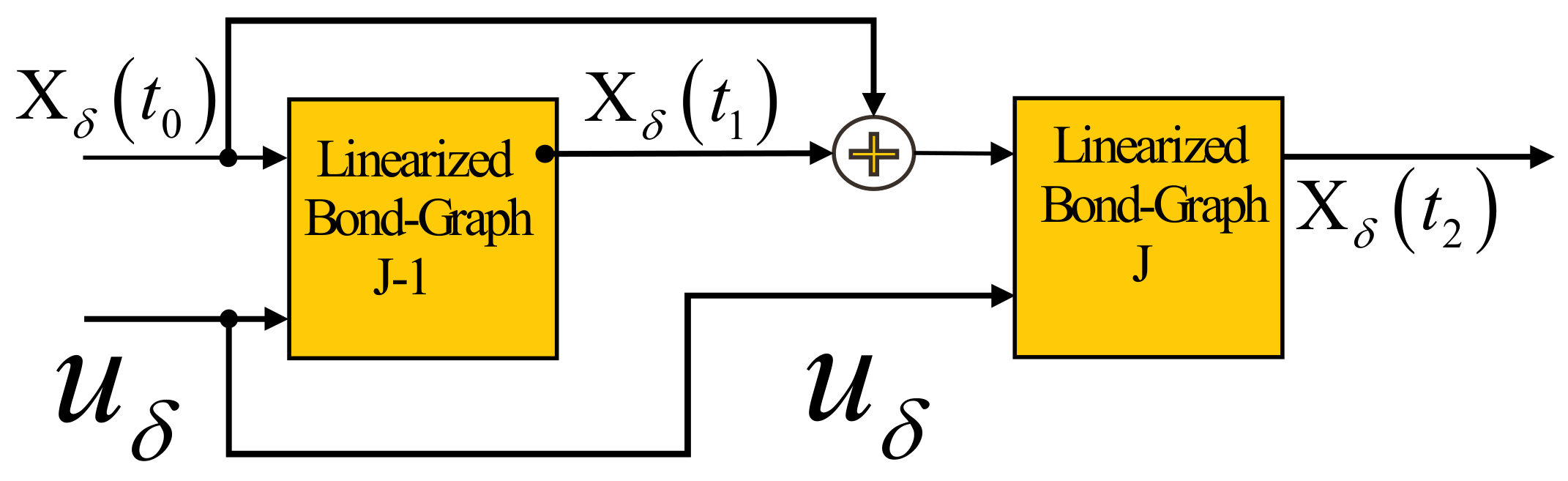
- The new output is the sum of the operating point values found in step 2 and the increment produced at the moment.
- Additional sources due to a linearized bond graph will be fed by the outputs found in step 5.
- The value of the increment in the state variables will be updated to recalculate the next operating point values.
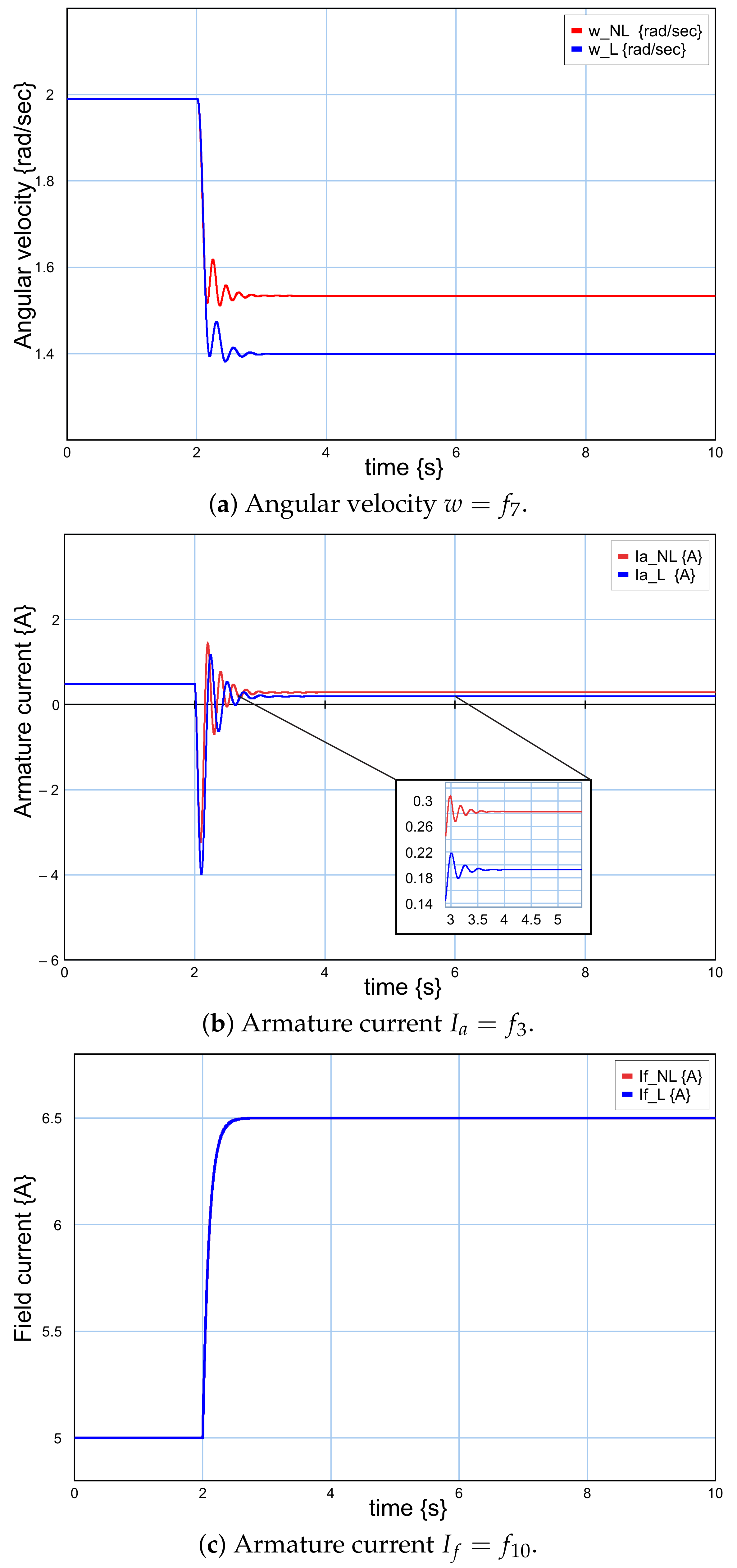
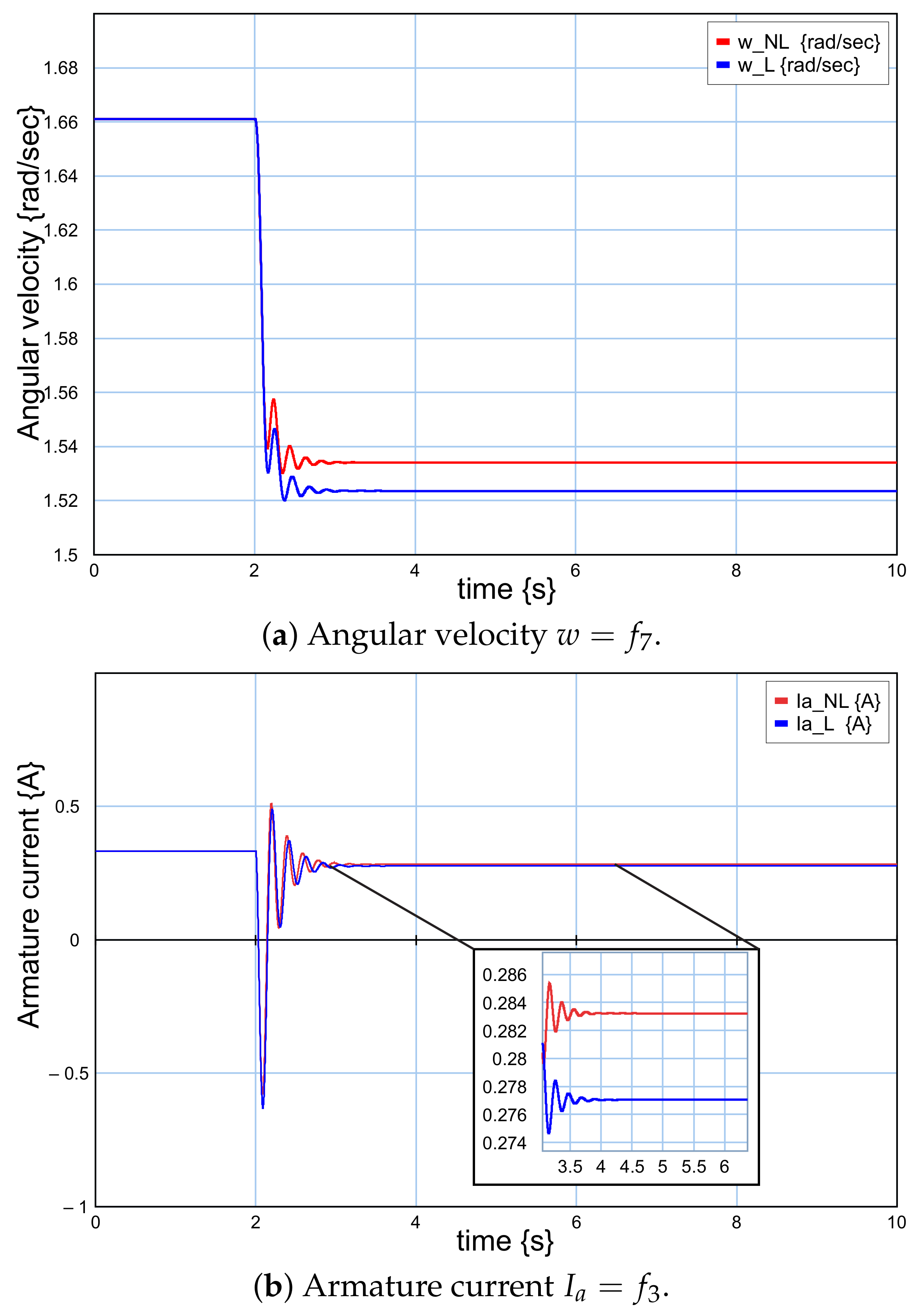
5. Case Study
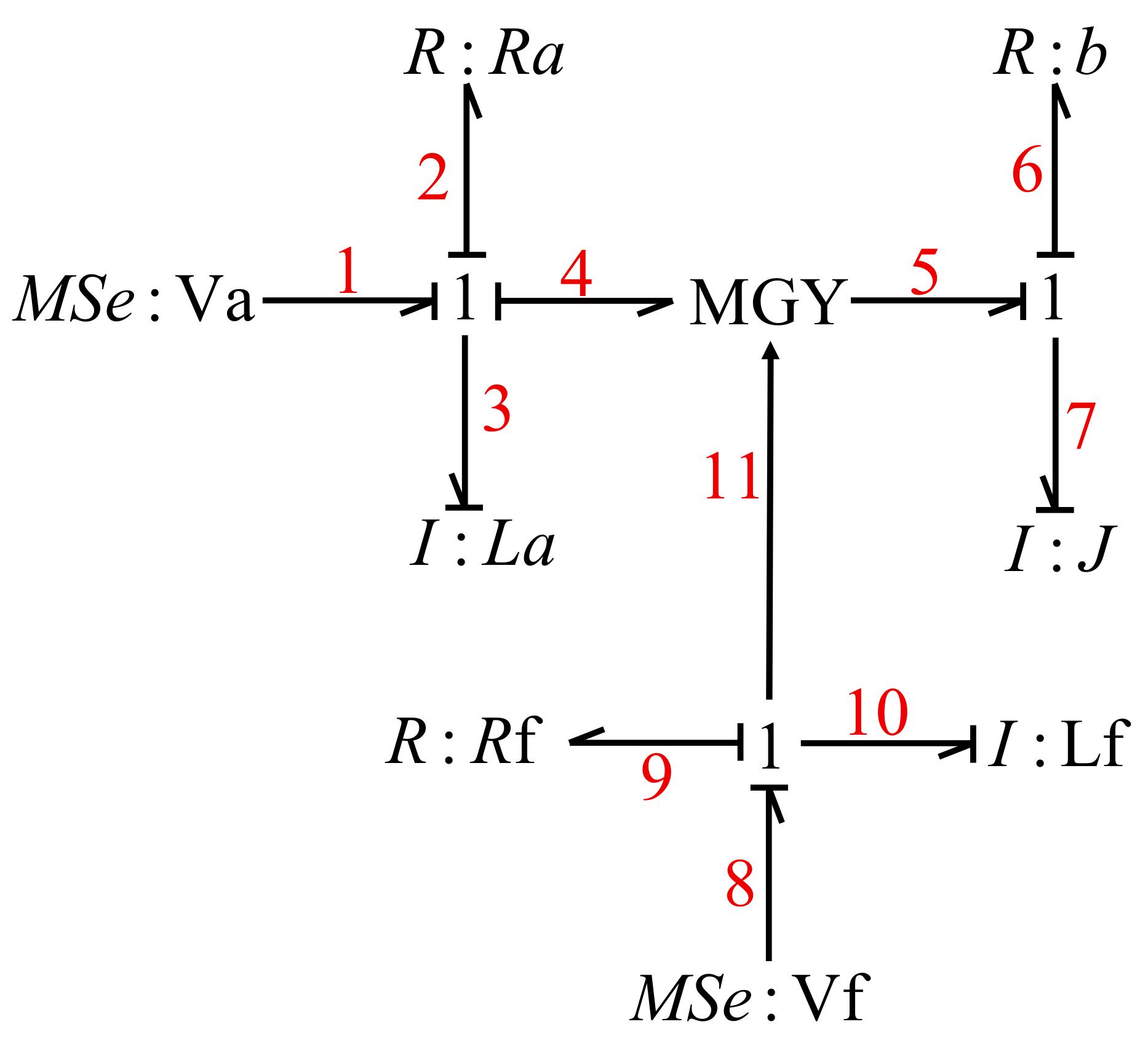
- -
- The armature winding formed by the connection of and to a junction 1 indicating that the armature current is the same in these elements.
- -
- The field winding formed by the connection of and to a junction 1 indicating that the field current is the same in these elements.
- -
- The mechanical component by the connection of and to a junction 1 indicating that the angular velocity is the same in these elements.
- -
- The electrical energy conversion to mechanical energy is realized with an element modulated by an active bond due to the field current.
- From to is ;
- From to is .
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Verrelli, C.; Tomei, P.; Lorenzani, E.; Migliazza, G.; Immovilli, F. Nonlinear tracking control for sensorless permanent magnet synchronous motors with uncertainties. Control. Eng. Pract. 2017, 60, 157–170. [Google Scholar] [CrossRef]
- Asada, H.H.; Wu, F.; Girard, A.; Mayalu, M. A data-driven approach to precise linearization of nonlinear dynamical systems in augmented latent space. In Proceedings of the 2016 American Control Conference (ACC), Boston, MA, USA, 6–8 July 2016; pp. 1838–1844. [Google Scholar]
- Aguilar, O.; Tapia, R.; Rivas, I.; Minor, H. Adaptive Speed Controller for a Permanent Magnet Synchronous Motor. Nat. Eng. 2019, 11, 142–170. [Google Scholar] [CrossRef]
- Igarashi, Y.; Yamakita, M.; Ng, J.; Asada, H.H. MPC Performances for Nonlinear Systems Using Several Linearization Models. In Proceedings of the 2020 American Control Conference (ACC), Denver, CO, USA, 1–3 July 2020; pp. 2426–2431. [Google Scholar] [CrossRef]
- Khalil, H.K.; Grizzle, J.M. Nonlinear Systems; Prentice-Hall: Hoboken, NJ, USA, 2002; Volume 3. [Google Scholar]
- Khalil, H.K. Nonlinear Control, Global ed.; Pearson Education Limited: London, UK, 2015. [Google Scholar]
- Karnopp, D. Power and Energy in Linearized Physical Systems. J. Frankl. Inst. 1977, 303, 85–98. [Google Scholar] [CrossRef]
- Masoudi, R.; NcPhee, J. Application of Karhunen-Loeve decomposition and piecewise linearization to a physics-based battery model. Electrochem. Acta 2021, 365, 137093. [Google Scholar] [CrossRef]
- Anderson, P.M.; Fouad, A.A. Power System Control and Stability; Science Press: Beijing, China, 1986. [Google Scholar]
- Kundur, P. Power System Stability and Control; McGraw-Hill: New York, NY, USA, 1994. [Google Scholar]
- Grigsby, L.L. Power Systems Stability and Control, 3rd ed.; CRC Press: Boca Raton, FL, USA, 2012. [Google Scholar]
- Vittal, V.; McCalley, J.D.; Anderson, P.M.; Fouad, A.A. Power System Control and Stability, 3rd ed.; Wiley-IEEE Press: Hoboken, NJ, USA, 2019. [Google Scholar]
- Yang, D.C.H.; Tzeng, S.W. Simplification and Linearization of manipulator dynamics by the design of inertia distribution. Int. J. Robot. Res. 1986, 5, 120–128. [Google Scholar] [CrossRef]
- Orhanli, T.; Yilmaz, A. Analysis of Gait Dynamics with the Double Pendulum Model. In Proceedings of the 2019 27th Signal Processing and Communications Applications Conference (SIU), Sivas, Turkey, 24–26 April 2019; pp. 1–4. [Google Scholar] [CrossRef]
- Malgalhaes, F.C.; Hirokazu, W.E.; Correa, M.L.F. A linearized small-signal Thevenin-equivalent model of a voltage-controlled modular multilevel converter. Electr. Power Syst. Res. 2020, 182, 106231. [Google Scholar]
- Beauchamp, D.; Chugg, K.M. Linearization for High-Speed Current-Steering DACs Using Neural Networks. arXiv 2021, arXiv:2011.10642. [Google Scholar]
- Hernandez, M.; Messina, A.R. Recursive Linearization of Higher-Order for Power System Models. IEEE Trans. Power Syst. 2021, 36, 1206–1216. [Google Scholar] [CrossRef]
- Breedveld, P.C. Modeling and Simulation of Dynamic Systems Using Bond Graphs; EOLSS Publishers: Oxford, UK, 2008. [Google Scholar]
- Kypuros, J.A. System Dynamics and Control with Bond Graph Modeling; CRC Press: Boca Raton, FL, USA, 2013. [Google Scholar]
- Tenreiro, M.J.A.; Cunha, V.M.R. An Introduction to Bond Graph Modeling with Applications; CRC Press: Boca Raton, FL, USA, 2021. [Google Scholar]
- Karnopp, D.C.; Rosenberg, R. Systems Dynamics: A Unified Approach; Wiley John & Sons: Hoboken, NJ, USA, 2000. [Google Scholar]
- Sueur, C.; Dauphin-Tanguy, G. Bond graph approach for structural analysis of MIMO linear systems. J. Franklin Inst. 1991, 1, 55–70. [Google Scholar] [CrossRef]
- Borutzky, W. Bond Graph Methodology: Development and Analysis of Multidisciplinary Dynamic Systems Models; Springer: Berlin/Heidelberg, Germany, 2010. [Google Scholar]
- Borutzky, W. Bond Graph Modelling of Engineering Systems: Theory, Applications and Software Support; Springer: Berlin/Heidelberg, Germany, 2011. [Google Scholar]
- Zanj, A.; He, F.; Breedveld, P.C. An energy-based viscoelastic model for multiphysical systems: A Bond graph approach. In Proceedings of the 2016 IEEE International Conference on Systems, Man and Cybernetics (SMC), Budapest, Hungary, 9–12 October 2016; pp. 2214–2219. [Google Scholar] [CrossRef]
- Zanj, A.; He, F. Multiple-field systems dynamic modeling, Part I: Physical decomposition of multi-physical systems, a bond graph approach. In Proceedings of the 2017 8th International Conference on Mechanical and Aerospace Engineering (ICMAE), Prague, Czech Republic, 22–25 July 2017; pp. 661–666. [Google Scholar] [CrossRef]
- Gonzalez, G.; Galindo, R. A procedure to linearize a class of non-linear systems modelled by bond graphs. Math. Comput. Model. Dyn. Syst. 2015, 21, 38–57. [Google Scholar] [CrossRef]
- Sia, K.; Namaane, A.; M’Sirdi, N.K. A new structural approach for ARRs generation from linear & linearized bond graphs. In Proceedings of the 2011 International Conference on Communications, Computing and Control Applications (CCCA), Hammamet, Tunisia, 3–5 March 2011; pp. 1–6. [Google Scholar] [CrossRef]
- Al-Mashhadani, I.; Hadjiloucas, S. Linearized Bond Graph of Hodgkin-Huxley Memristor Neuron Model, CNNA 2016. In Proceedings of the 15th International Workshop on Cellular Nanoscale Networks and their Applications, Dresden, Germany, 23–25 August 2016; pp. 1–2. [Google Scholar]
- Gonzalez, G.; Ayala, G.; Barrera, N.; Padilla, J.A. Linearization of a class of non-linear systems modelled by multibond graphs. Math. Comput. Model. Dyn. Syst. 2019. [Google Scholar] [CrossRef]
- Rough, W.J. Linear System Theory; Prentice-Hall: Hoboken, NJ, USA, 1996. [Google Scholar]
- Kailath, T. Linear Systems; Prentice-Hall: Hoboken, NJ, USA, 1979. [Google Scholar]
- Chen, C.T. Linear System, Theory and Design, 3rd ed.; Holt, Rinehart and Winston: New York, NY, USA, 1998. [Google Scholar]
- Antsaklis, P.J.; Michel, A.N. Linear Systems; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2006. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| H | H | ||
| N-s/m | N-m-s | V | V |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rodríguez, R.S.; Gonzalez Avalos, G.; Barrera Gallegos, N.; Ayala-Jaimes, G.; Padilla Garcia, A. Approximation of Linearized Systems to a Class of Nonlinear Systems Based on Dynamic Linearization. Symmetry 2021, 13, 854. https://doi.org/10.3390/sym13050854
Rodríguez RS, Gonzalez Avalos G, Barrera Gallegos N, Ayala-Jaimes G, Padilla Garcia A. Approximation of Linearized Systems to a Class of Nonlinear Systems Based on Dynamic Linearization. Symmetry. 2021; 13(5):854. https://doi.org/10.3390/sym13050854
Chicago/Turabian StyleRodríguez, Raquel S., Gilberto Gonzalez Avalos, Noe Barrera Gallegos, Gerardo Ayala-Jaimes, and Aaron Padilla Garcia. 2021. "Approximation of Linearized Systems to a Class of Nonlinear Systems Based on Dynamic Linearization" Symmetry 13, no. 5: 854. https://doi.org/10.3390/sym13050854