
Path Tracking of Permanent Magnet Synchronous Motor Using Fractional Order Fuzzy PID Controller

Abstract
:1. Introduction
2. Permanent Magnet Synchronous Motor Control System
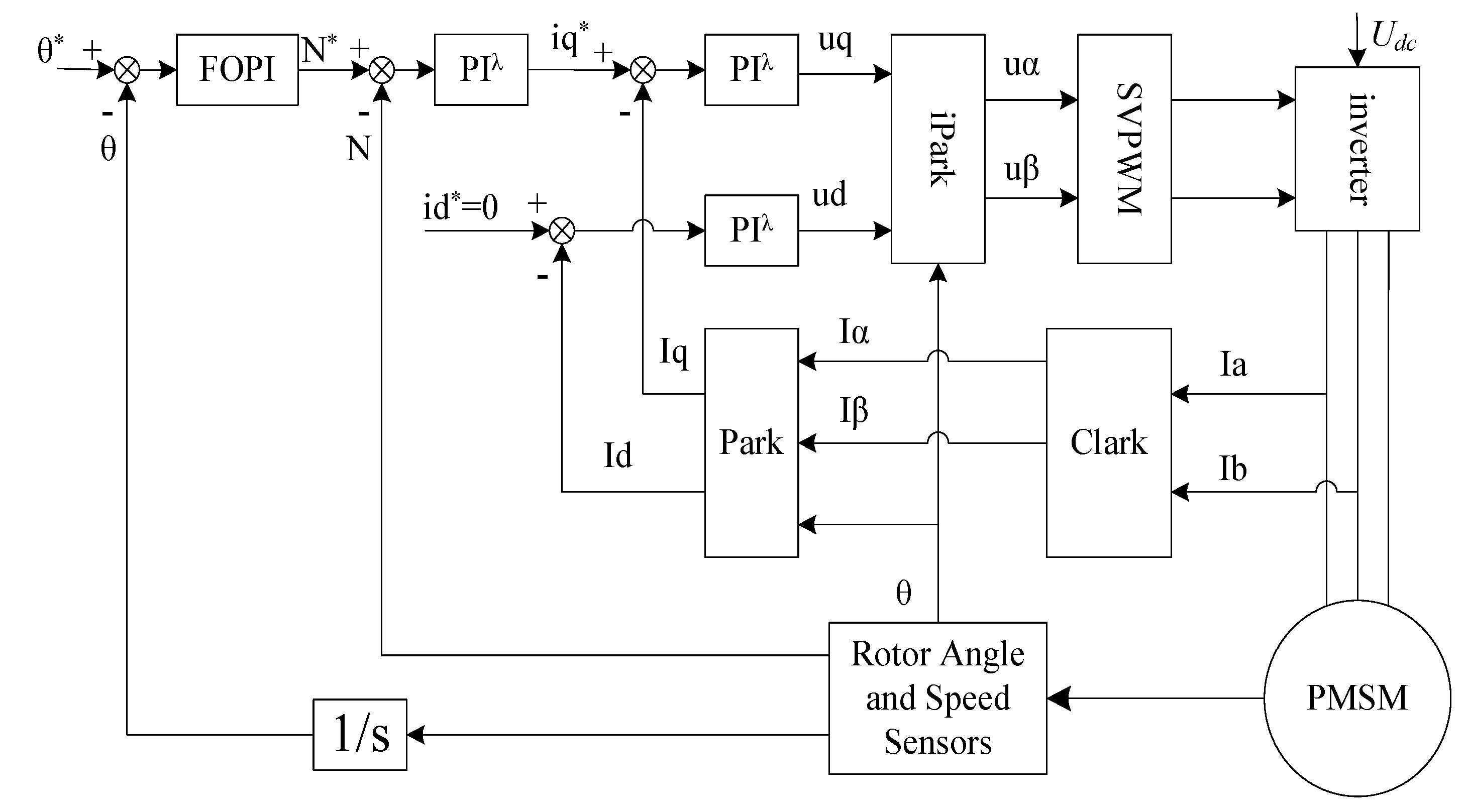
2.1. PMSM AC Servo Control System
2.2. Mathematical Model of Permanent Magnet Synchronous Motor
2.3. Vector Control of Permanent Magnet Synchronous Motor
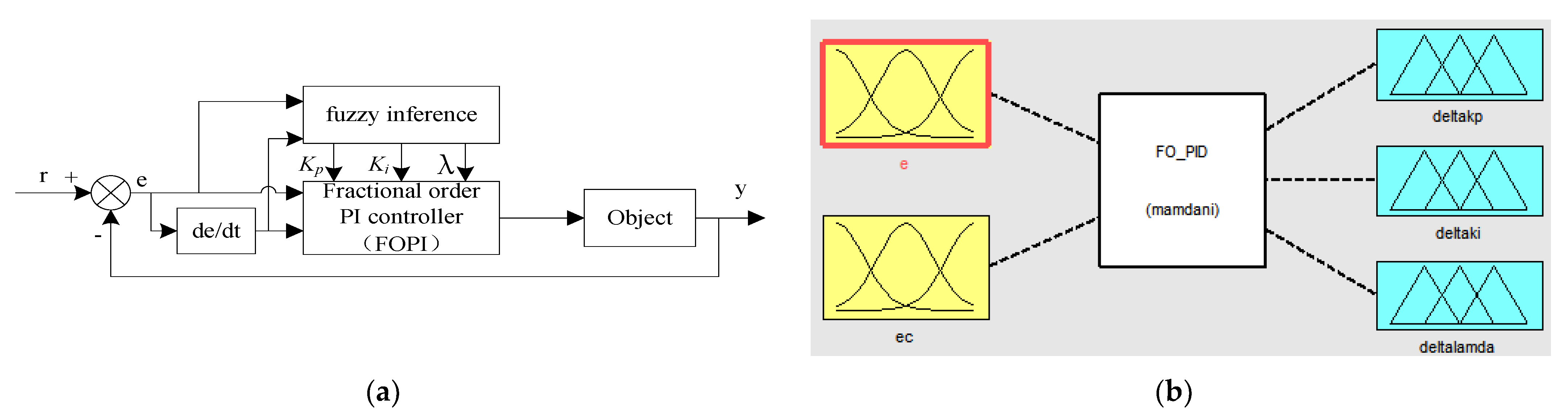
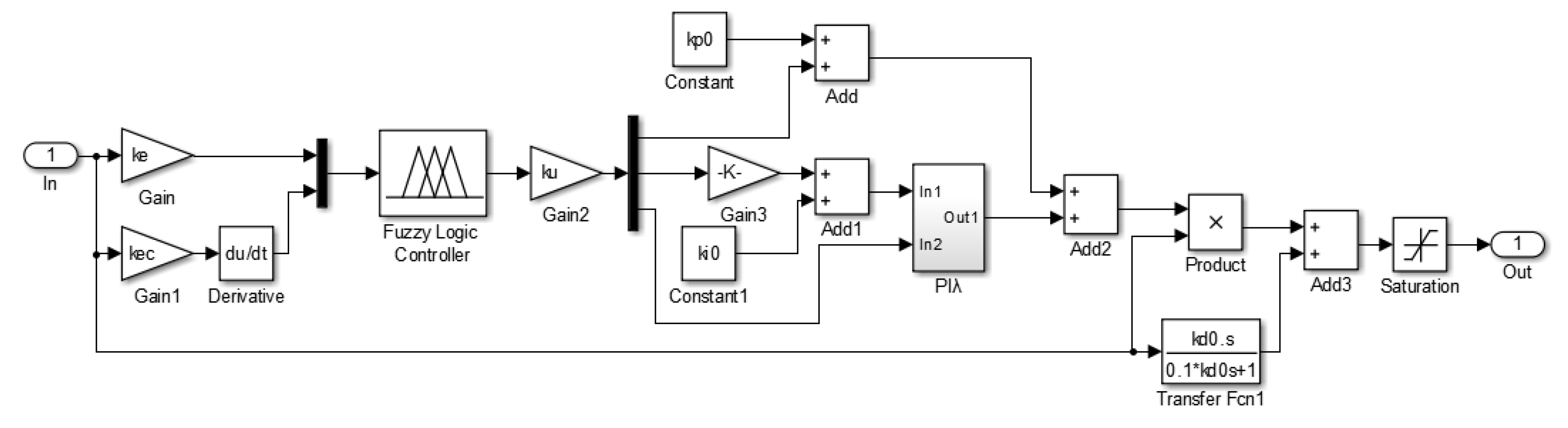
2.4. Fuzzy PIλ Position Control (FOPI)
3. Fuzzy Parameter Self-Tuning PIλ Controller
3.1. Fractional-Order Operator
3.2. Fractional-Order System
3.3. Fractional-Order PI Controller (PIλ)
3.4. Design of Fuzzy Parameter Self-Tuning Controller
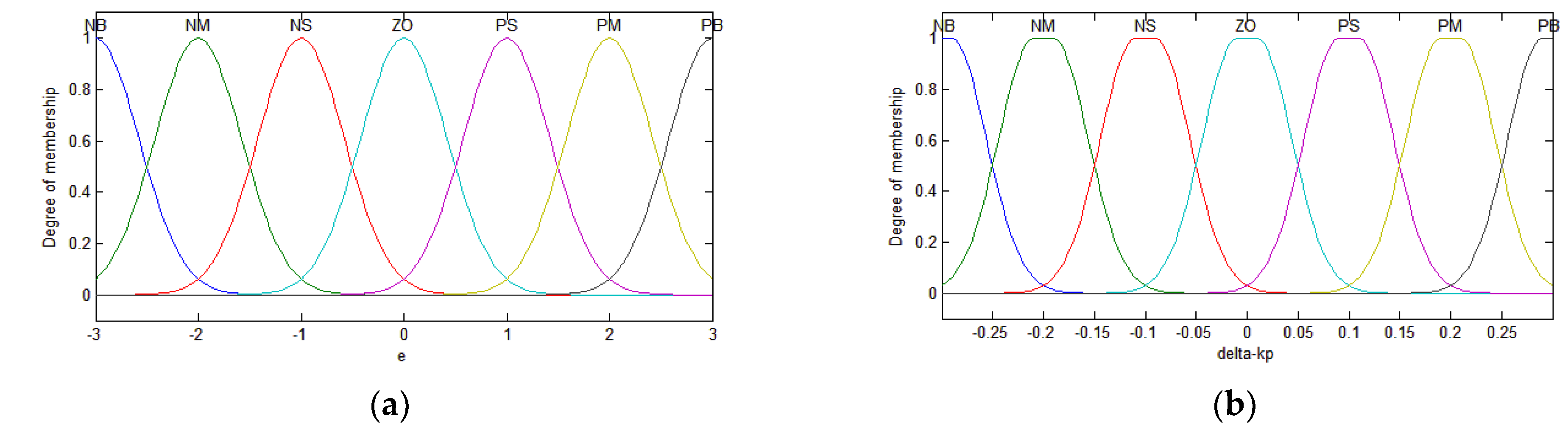
3.4.1. Determination of Membership Function
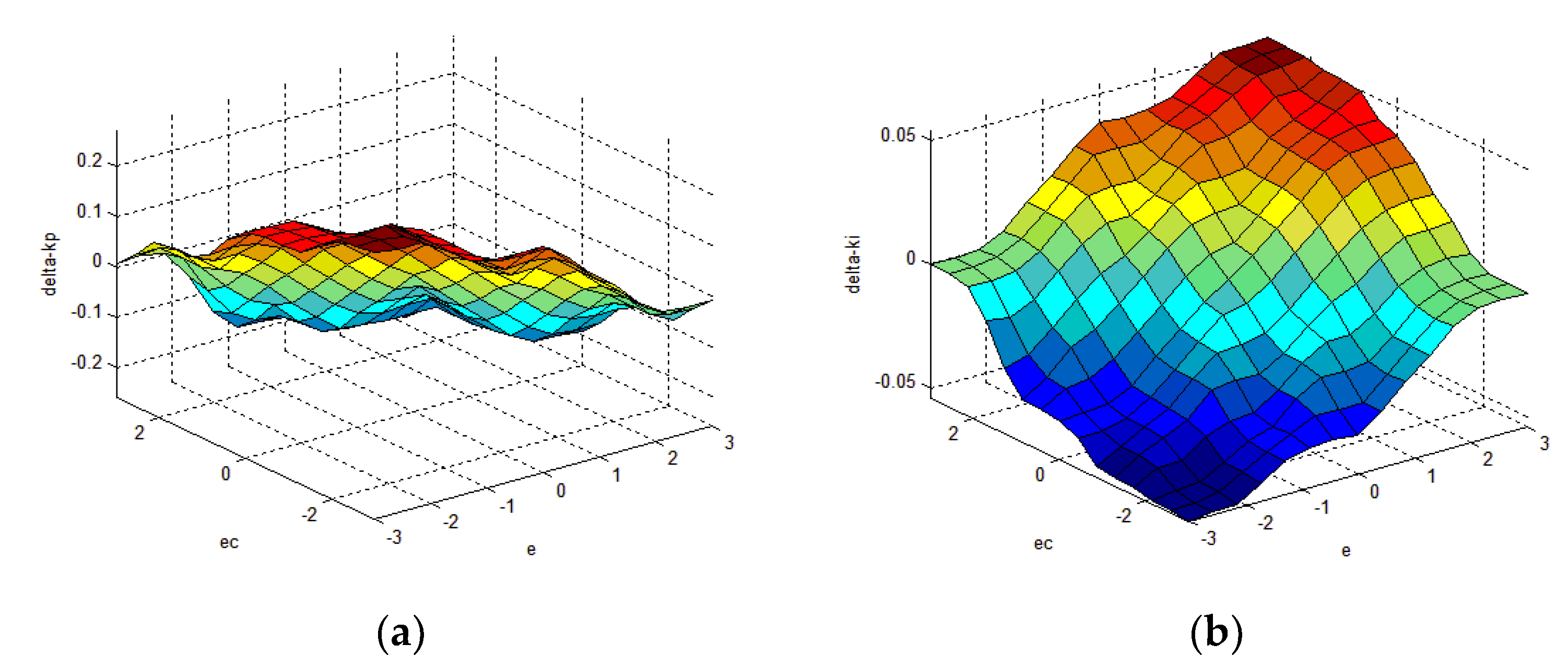
3.4.2. Parameter Tuning Rule of PIλ Controller
- 1. (e==NB) & (ec==NB) => (delta_kp=PB)(delta_ki=NB)(delta_lamda=NB) (1)
- 2. (e==NB) & (ec==NM) => (delta_kp=PB)(delta_ki=NB)(delta_lamda=NB) (1)
- 3. (e==NB) & (ec==NS) => (delta_kp=PM)(delta_ki=NB)(delta_lamda=NB) (1)
- 4. (e==NB) & (ec==ZO) => (delta_kp=PM)(delta_ki=NM)(delta_lamda=NM) (1)
- 5. (e==NB) & (ec==PS) => (delta_kp=PS)(delta_ki=NM)(delta_lamda=NM) (1)
- 6. (e==NB) & (ec==PM) => (delta_kp=PS)(delta_ki=ZO)(delta_lamda=ZO) (1)
- 7. (e==NB) & (ec==PB) => (delta_kp=ZO)(delta_ki=ZO)(delta_lamda=ZO) (1)
- ............
- 43. (e==PB) & (ec==NB) => (delta_kp=ZO)(delta_ki=ZO)(delta_-lamda=ZO) (1)
- 44. (e==PB) & (ec==NM) => (delta_kp=NS)(delta_ki=ZO)(delta_lamda=ZO) (1)
- 45. (e==PB) & (ec==NS) => (delta_kp=NS)(delta_ki=PS)(delta_lamda=PS) (1)
- 46. (e==PB) & (ec==ZO) => (delta_kp=NM)(delta_ki=PM)(delta_lamda=PM) (1)
- 47. (e==PB) & (ec==PS) => (delta_kp=NM)(delta_ki=PB)(delta_lamda=PB) (1)
- 48. (e==PB) & (ec==PM) => (delta_kp=NB)(delta_ki=PB)(delta_lamda=PB) (1)
- 49. (e==PB) & (ec==PB) => (delta_kp=NB)(delta_ki=PB)(delta_lamda=PB) (1)
4. Simulation Research and Result Analysis
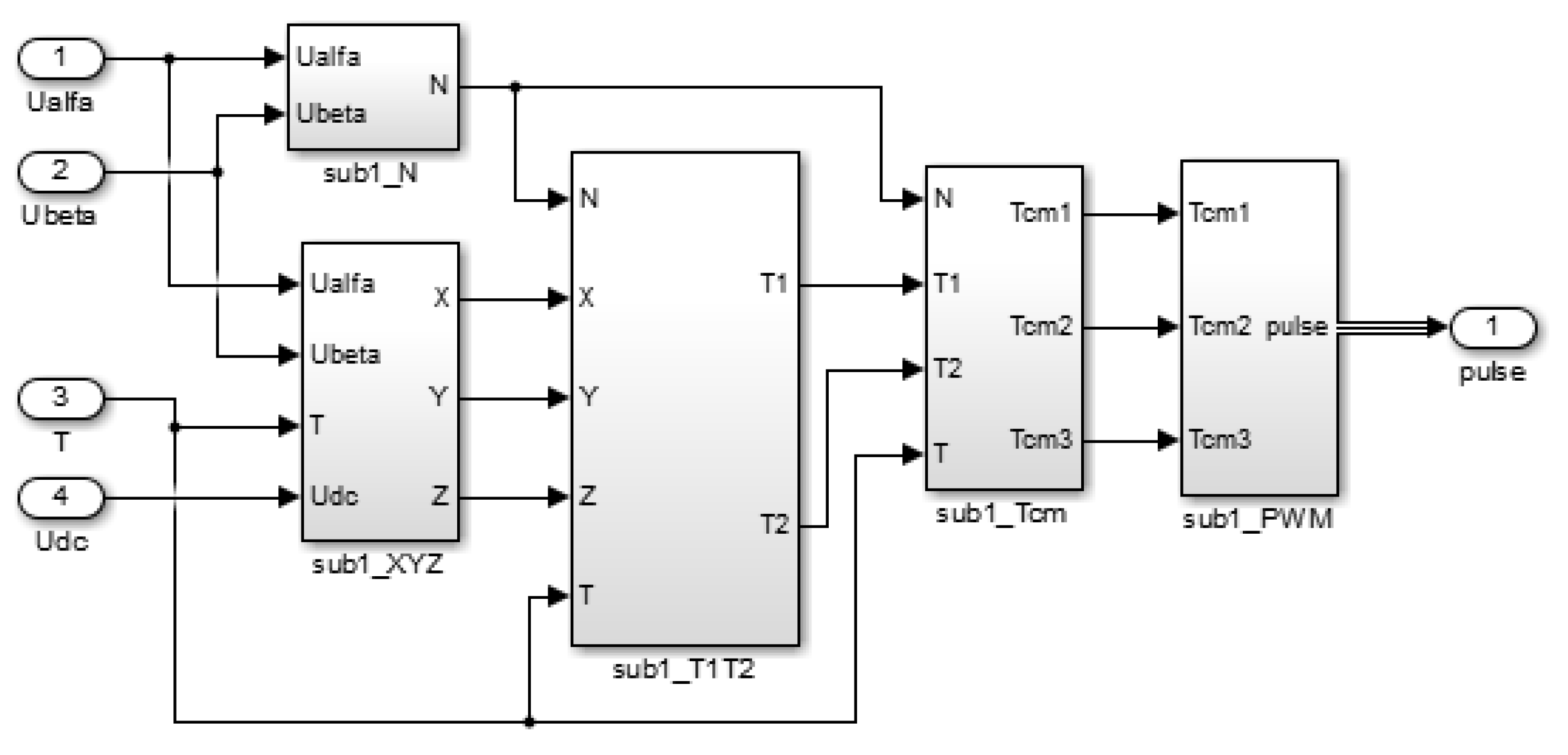
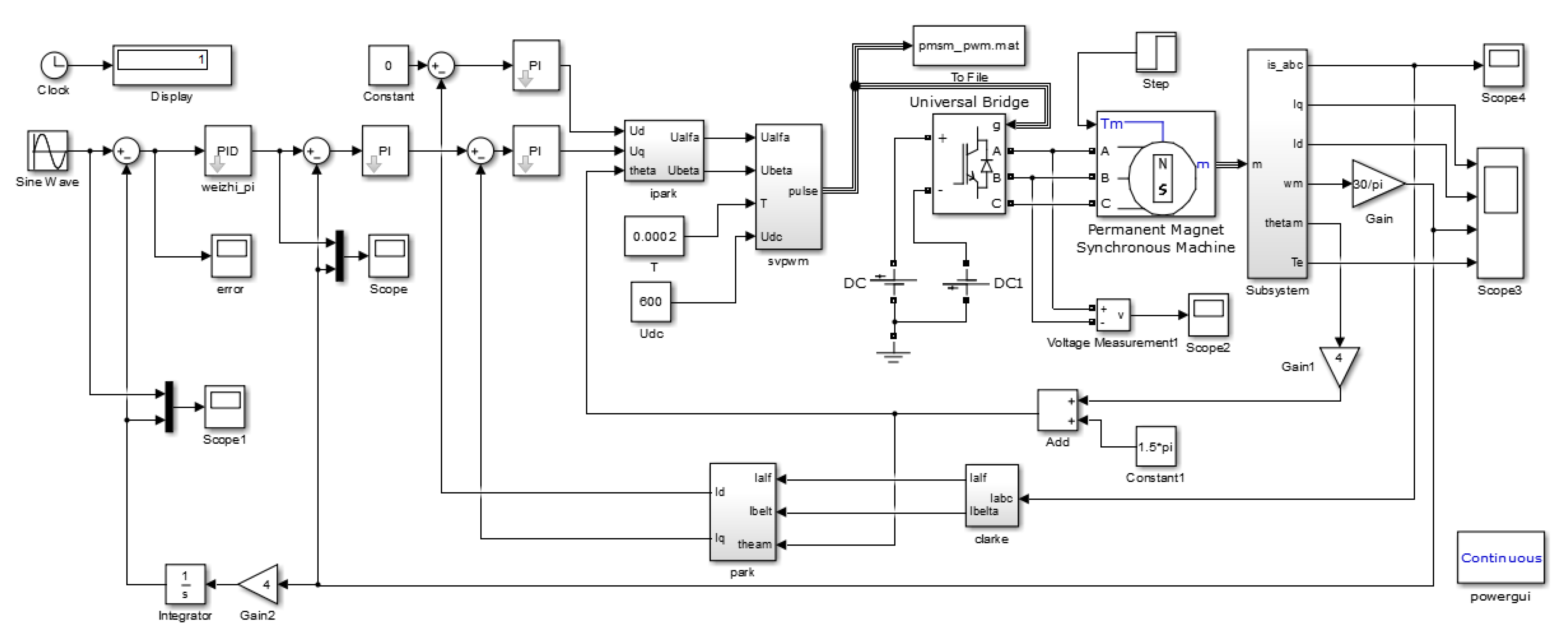
4.1. Three Closed-Loop PMSM Simulation Model
4.2. Simulation of Current Loop and Velocity Loop
4.3. Position PI Control
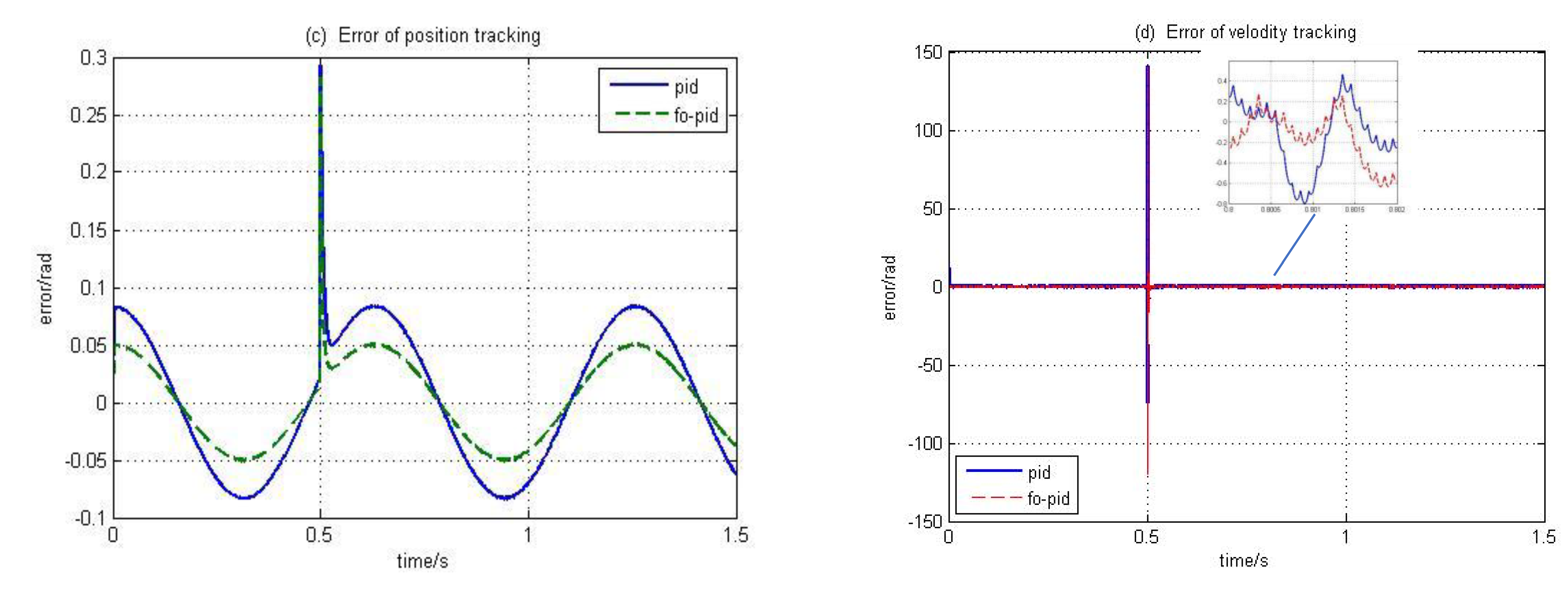
4.4. Fuzzy Fractional-Order PID Control (FO-PID)
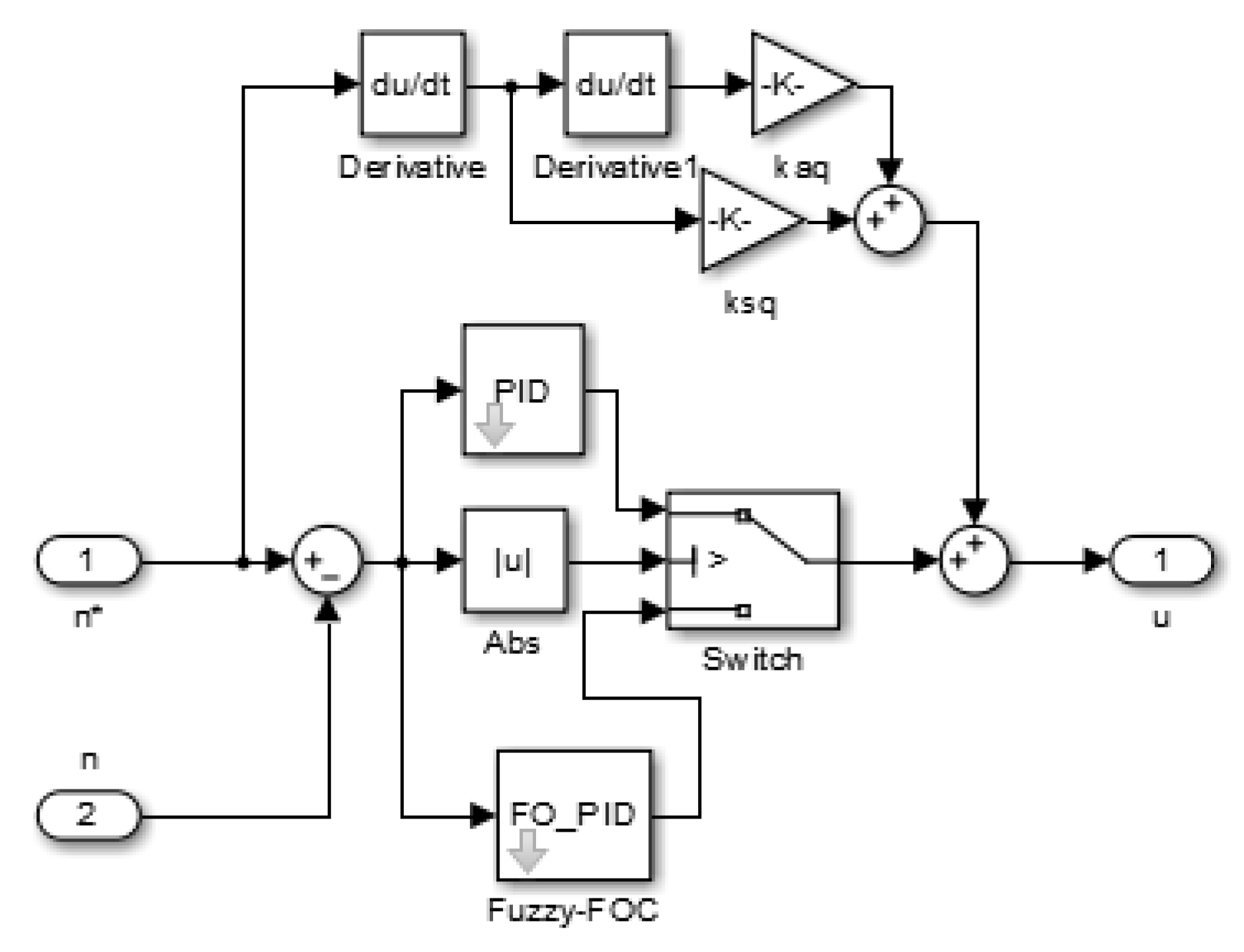
4.5. Compound Control with Speed Feed-Forward and Acceleration Feed-Forward (FO-PID-FF)
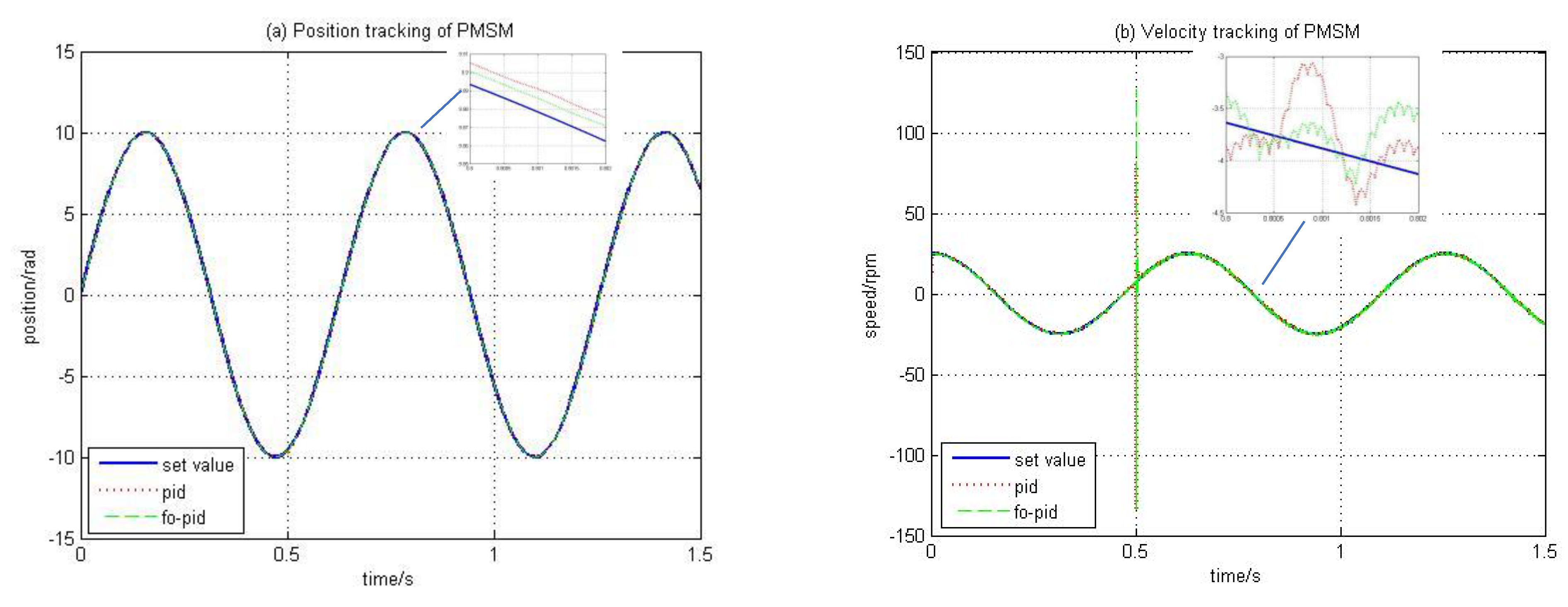
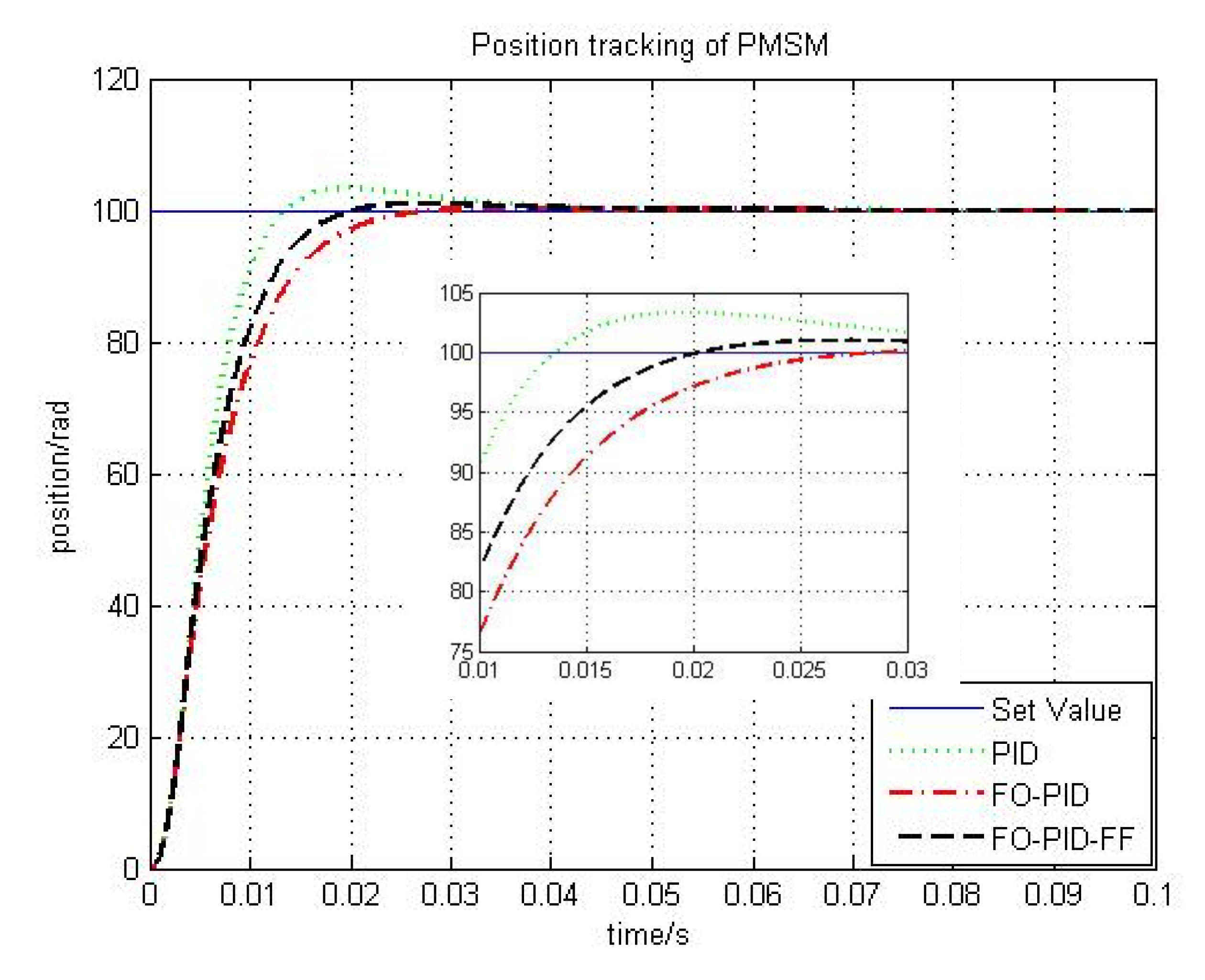
4.6. Performance Analysis of Three Position Control Strategies
4.6.1. Motor Starting Stage
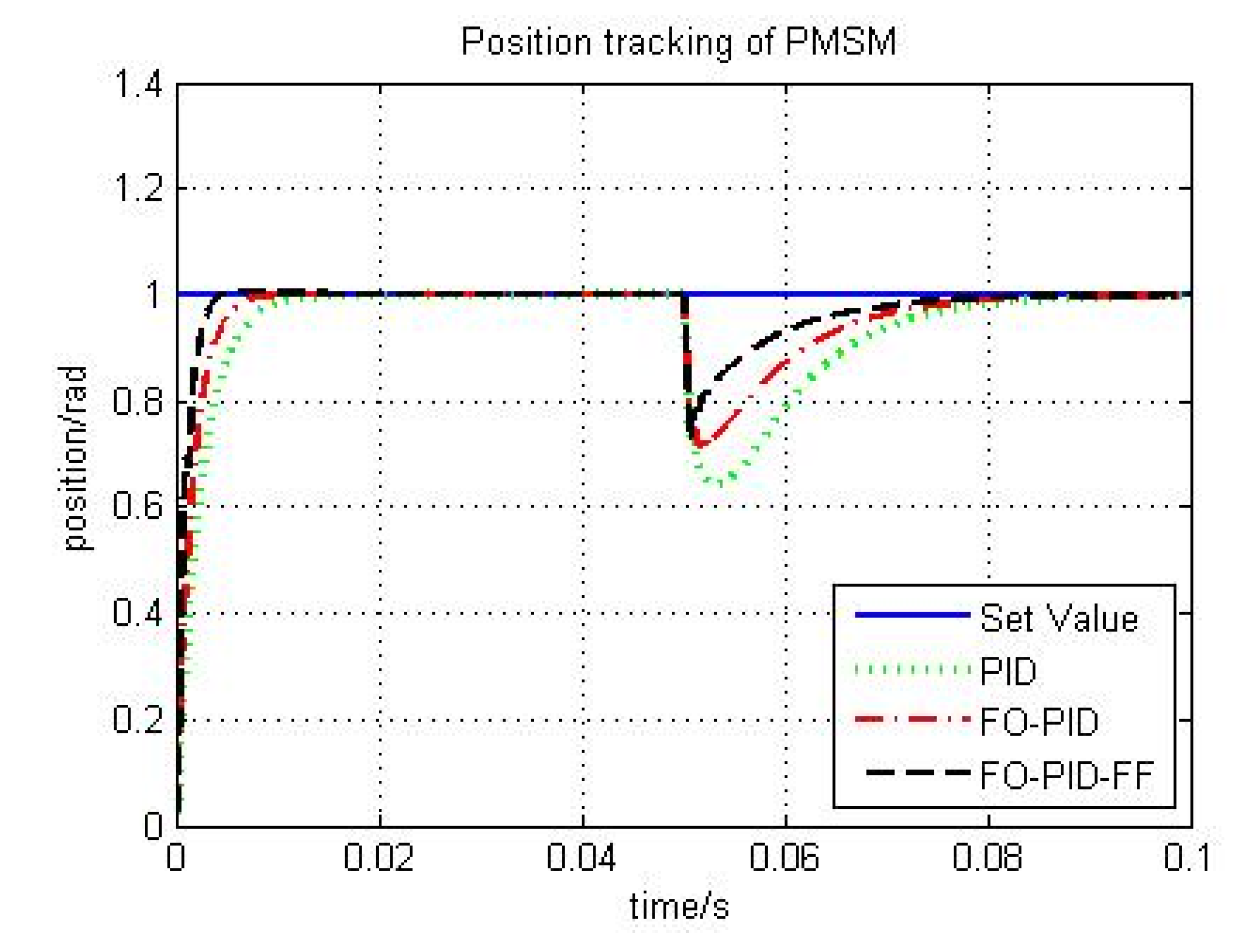
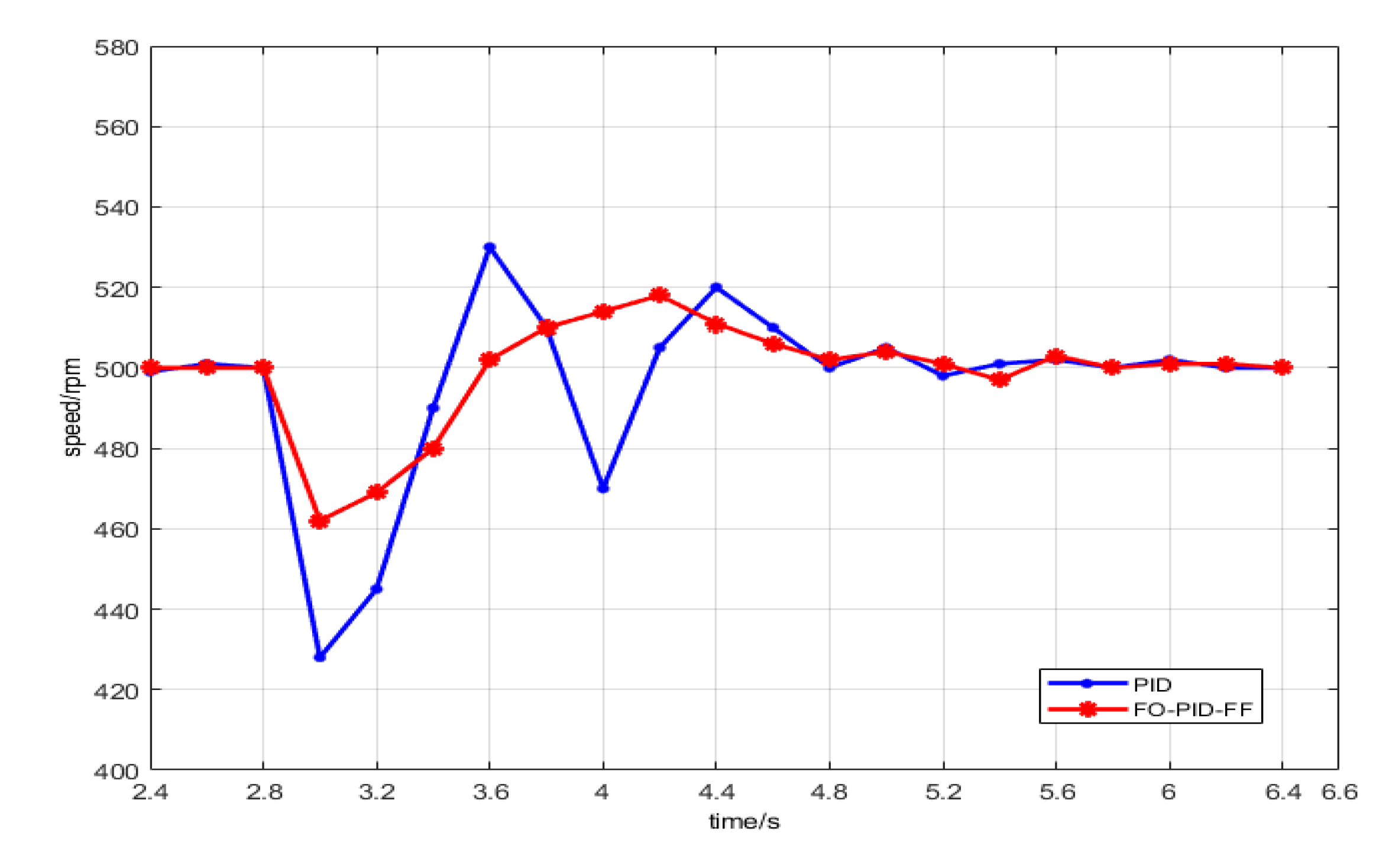
4.6.2. Load Disturbance Stage
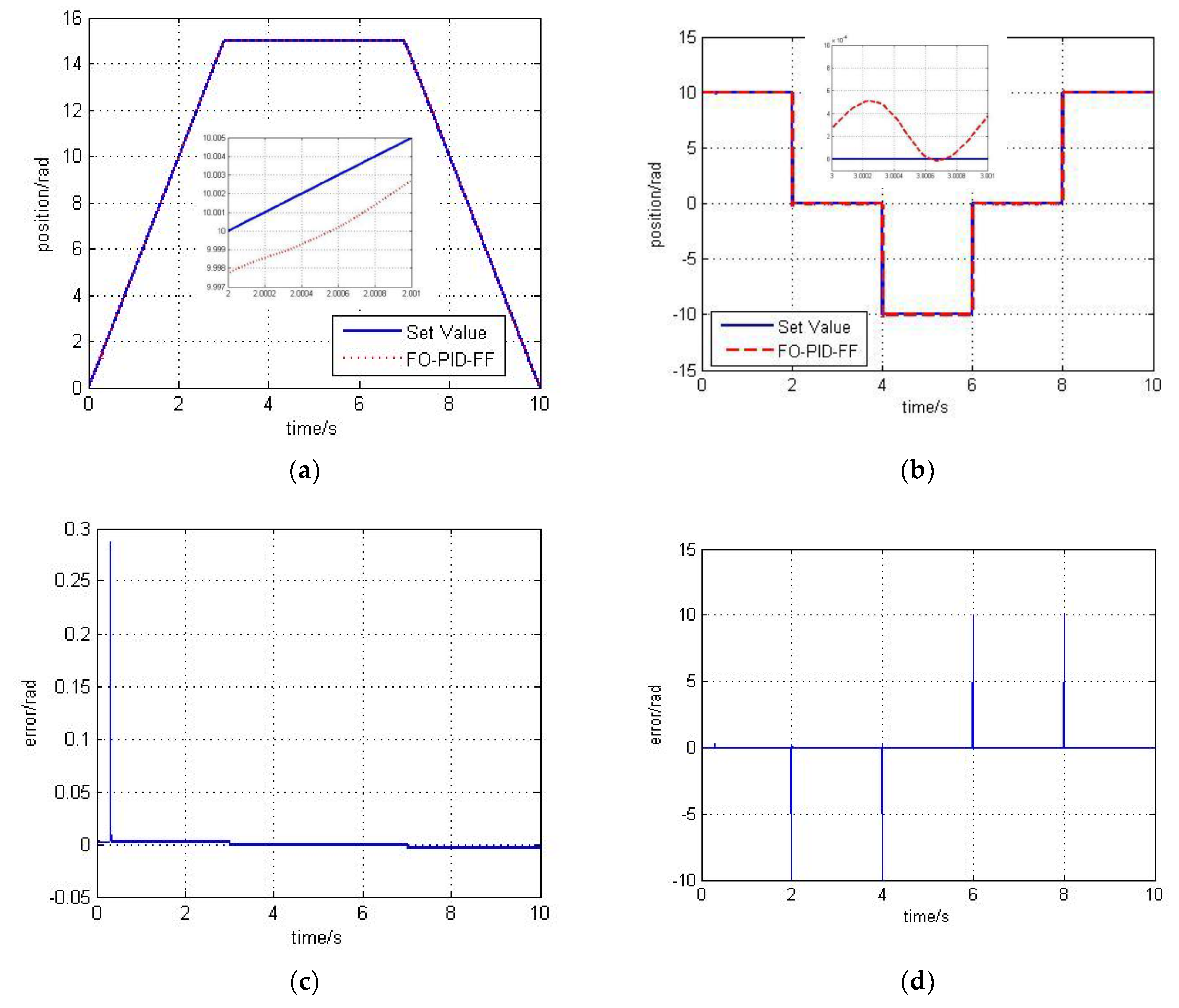
4.6.3. Other Trajectory Tracking Analysis
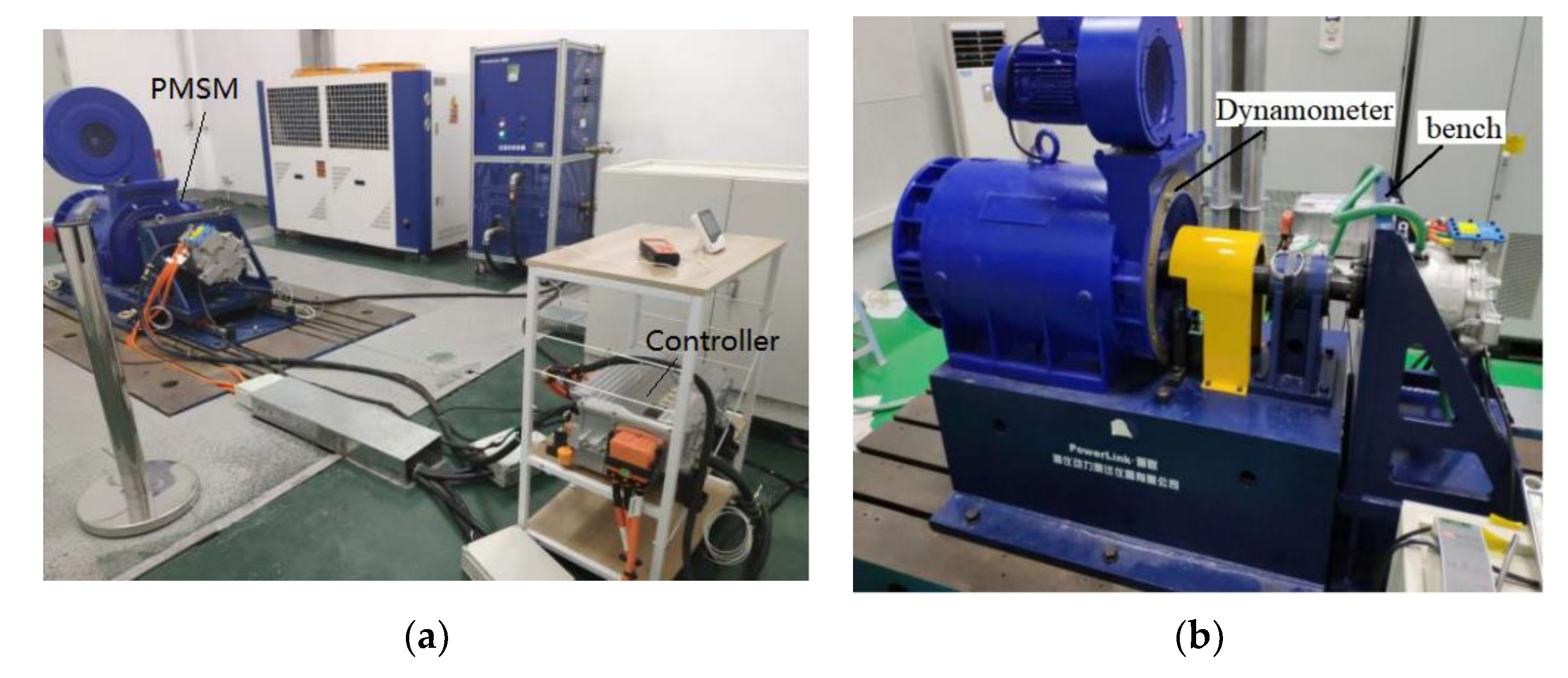
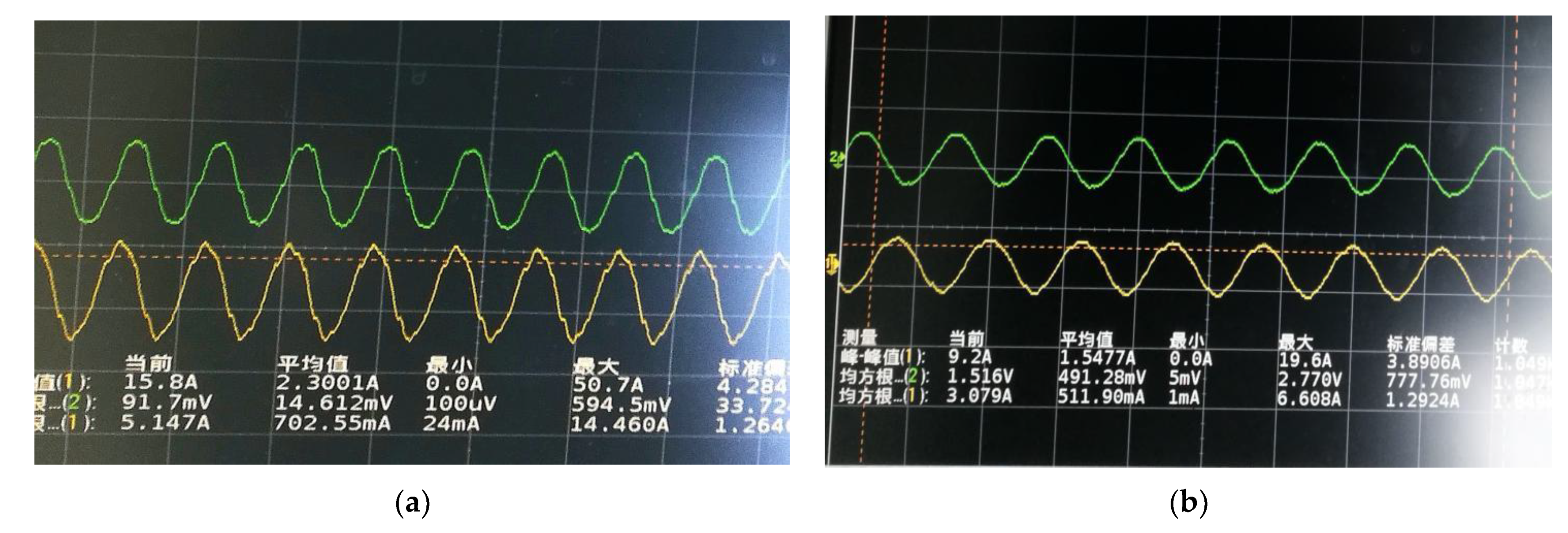
5. Experiment and Test
- (1)
- Experiment of PMSM speed loop and current loop
- (2)
- Experiment of PMSM position loop and velocity loop
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Xue, W.; Li, Y.L.; Cang, S.J.; Jia, H.; Wang, Z. Chaotic behavior and circuit implementation of a fractional-order permanent magnet synchronous motor model. J. Frankl. Inst. 2015, 352, 2887–2898. [Google Scholar] [CrossRef]
- Thakar, U.; Joshi, V.; Vyawahare, V. Design of fractional -order PI controllers and comparative analysis of these controllers with linearized, nonlinear integer-order and nonlinear fractional-order representations of PMSM. Int. J. Dyn. Control 2017, 5, 187–197. [Google Scholar] [CrossRef]
- Bao, X.P.; Ji, Z.; Zhu, T. Research and Development on high-performance PMSM servo system. Micromotors 2014, 47, 84–88. [Google Scholar]
- Liu, C.Q.; Luo, G.Z.; Tu, W.C.; Wan, H. Servo systems with double closed-loops based on active disturbance rejection controllers. Proc. CSEE 2017, 37, 7032–7039. [Google Scholar]
- Zuo, Y.F.; Zhang, J.; Liu, C.; Zhang, T. Integrated design for permanent magnet synchronous motor servo systems based on active disturbance rejection control. Trans. China Electrotech. Soc. 2016, 31, 51–58. [Google Scholar]
- Hou, R.M.; Liu, R.Z.; Hou, Y.L.; Gao, Q.; Yang, G.-L. Application of adaptive fuzzy wavelet neural sliding mode control in AC servo system. Acta Armamentarii 2014, 35, 769–775. [Google Scholar]
- Hou, R.M.; Liu, R.Z.; Gao, Q.; Wang, L.; Deng, T.-B. Application of adaptive fuzzy wavelet neural network in AC servo control system. Acta Armamentarii 2015, 36, 781–788. [Google Scholar]
- Zhang, B.B.; Zhao, D.Y.; Zhao, T. Adaptive sliding mode control based on disturbance observer for manipulator systems. Inf. Control. 2018, 47, 184–190. [Google Scholar]
- Zhang, B.T.; Pi, Y.G.; Luo, Y. Fractional order sliding-mode control based on parameters auto-tuning for velocity control of permanent magnet synchronous motor. Isa Trans. 2012, 5, 649–656. [Google Scholar] [CrossRef]
- Sun, G.H.; Ma, Z.Q. Practical tracking control of linear motor with adaptive fractional order terminal sliding mode control. IEEE/ASME Trans. Mechatron. 2017, 6, 2643–2653. [Google Scholar] [CrossRef]
- Yue, Y.B.; Zhang, R.K.; Wu, B.; Shao, W. Direct torque control method of PMSM based on fractional order PID controller. Data Driven Control Learn. Syst. 2017, 5, 411–415. [Google Scholar]
- Xie, Y.; Tang, X.; Song, B.; Zhou, X.; Guo, Y. Data-driven adaptive fractional order PI control for PMSM servo system with measurement noise and data dropouts. ISA Trans. 2018, 4, 172–188. [Google Scholar] [CrossRef]
- Zhang, B.T.; Pi, Y. Robust fractional order proportion-plus-differential controller based on fuzzy inference for permanent magnet synchronous motor. IET Control Theory Appl. 2012, 6, 829–837. [Google Scholar] [CrossRef]
- Ullah, N.; Al-Ahmadi, A.A. A triple mode robust sliding mode controller for a nonlinear system with measurement noise and uncertainty. Math. Found. Comput. 2020, 2, 81–89. [Google Scholar] [CrossRef]
- Mani, P.; Rajan, R.; Shanmugam, L. Adaptive fractional fuzzy integral sliding mode control for PMSM model. IEEE Trans. Fuzzy Syst. 2019, 27, 1674–1686. [Google Scholar] [CrossRef]
- Rajagopal, K.; Karthikeyan, A.; Duraisamy, P. Chaos suppression in fractional order permanent magnet synchronous generator in wind turbine systems. Nonlinear Eng. 2017, 6, 79–87. [Google Scholar] [CrossRef]
- Rajasekhar, A.; Abraham, A.; Pant, M. A hybrid differential artificial bee colony algorithm based tuning of fractional order controller for permanent magnet synchronous motor drive. Int. J. Mach. Learn. Cybern. 2014, 5, 327–337. [Google Scholar] [CrossRef]
- Delavari, H.; Ghaderi, R.; Ranjbar, A.; Momani, S. Fuzzy fractional order sliding mode controller for nonlinear systems. Commun. Nonlinear Sci. Numer. Simul. 2010, 4, 963–978. [Google Scholar] [CrossRef]
- Lin, T.C.; Kuo, C.H. H∞ synchronization of uncertain fractional order chaotic systems: Adaptive fuzzy approach. ISA Trans. 2011, 50, 548–556. [Google Scholar] [CrossRef]
- Aghababa, M.P. Comments on “H-infinity synchronization of uncertain fractional order chaotic systems: Adaptive fuzzy approach”. ISA Trans. 2012, 1, 11–12. [Google Scholar] [CrossRef]
- Zhang, Y.; Xia, X.W.; Li, F.Z.; Dong, M. An adaptive fuzzy sliding mode position controller for naval gun servo system. Acta Armamentarii 2015, 36, 67–72. [Google Scholar]
- Petras, I. Fractional Order Nonlinear Systems. Springer Publication: New York, NY, USA, 2011; pp. 65–78. [Google Scholar]
- Zhong, Q.S.; Bao, J.F.; Yu, Y.B.; Liao, X.-F. Impulsive control for fractional-order chaotic systems. Chin. Phys. Lett. 2008, 8, 2812–2815. [Google Scholar]
- Wang, L.; Zhong, C.Q. Design of optimal fractional-order PID controllers using particle swarm optimization algorithm for DC motor system. In Proceedings of the Advanced Information Technology, Electronic & Automation Control Conference, Chongqing, China, 19–20 December 2015; IEEE: Piscataway, NJ, USA,, 2015; pp. 175–179. [Google Scholar]
- Yuan, L.; Hu, B.X.; Wei, K.; Shen, S. The Control Principle and MATLAB Simulation of Modern Permanent Magnet Synchronous Motor; Beijing Aerospace University Press: Beijing, China, 2016; pp. 27–51. [Google Scholar]
- Yuan, D.K.; Xu, Y.D.; Li, X.T. Variable Frequency Speed Regulating System of Permanent Magnet Synchronous Motor and Its Control; Machinery Industry Press: Beijing, China, 2016; pp. 55–60. [Google Scholar]
- Ramezanian, H.; Balochian, S.; Zare, A. Design of optimal fractional-order PID controllers using particle swarm optimization algorithm for Automatic voltage regulator (AVR) system. J. Control Autom. Electr. Syst. 2013, 24, 601–611. [Google Scholar] [CrossRef]
- Kanagaraj, N. Design and performance evaluation of fuzzy variable fractional-order [PI]λDµ controller for a class of first-order delay-time systems. Stud. Inform. Control 2019, 28, 443–452. [Google Scholar] [CrossRef]
- Rydel, M.; Stanisławski, R.; Latawiec, K.J. Balanced truncation model order reduction in limited frequency and time intervals for discrete-time commensurate fractional-order systems. Symmetry 2019, 11, 258. [Google Scholar] [CrossRef] [Green Version]
- Rydel, M.; Stanisławski, R. A new frequency weighted Fourier-based method for model order reduction. Automatica 2018, 88, 107–112. [Google Scholar] [CrossRef]
- Srivastava, H.M.; Sayed, A.M.; Gaafar, F.M. A class of nonlinear boundary value problems for an arbitrary Fractional-Order differential equation with the riemann-stieltjes functional integral and infinite-point boundary conditions. Symmetry 2018, 10, 508. [Google Scholar] [CrossRef] [Green Version]
- Chalishajar, D.; Kumar, A. Existence, uniqueness and Ulam’s stability of solutions for a coupled system of fractional differential equations with integral boundary conditions. Mathematics 2018, 6, 96. [Google Scholar] [CrossRef] [Green Version]
- Cattani, C.; Srivastava, H.M.; Yang, X.-J. Fractional Dynamics; Emerging Science Publishers: Berlin, Germany; Warsaw, Poland, 2015. [Google Scholar]
- Hamani, S.; Benchora, M.; Graef, J.R. Existence results for boundary-value problems with nonlinear fractional differential inclusions and integral conditions. Electron. J. Q. Theory Differ. Equ. 2013, 20, 1–16. [Google Scholar]
- Chen, Y.; Zhao, T.; Dian, S.Y.; Zeng, X.; Wang, H. Balance adjustment of power-line inspection robot using general type-2 fractional order fuzzy PID controller. Symmetry 2020, 12, 479. [Google Scholar] [CrossRef] [Green Version]
- Mendel, J.M. General type-2 fuzzy logic systems made simple: A tutorial. IEEE Trans. Fuzzy Syst. 2014, 22, 1162–1182. [Google Scholar] [CrossRef]
- Kumbasar, T.; Hagras, H. A self-tuning zSlices-based general type-2 fuzzy PI controller. IEEE Trans. Fuzzy Syst. 2015, 23, 991–1013. [Google Scholar] [CrossRef] [Green Version]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter Name (Unit) | Value |
|---|---|
| Stator resistance R () | 0.975 |
| Stator inductance Ld, Lq (H) | 0.0085 |
| Flux of Permanent Magnet Rotor in Stator Loop (Wb) | 0.175 |
| Rotating inertia of rotor and load J () | 0.00008 |
| Viscous friction coefficient F () | 4.047 × 10−4 |
| Pole logarithm of motor p | 4 |
| Regulator | Proportional P | Integral I |
|---|---|---|
| Location loop | 100 | 5 |
| Speed loop | 0.1 | 16 |
| id current loop | 30 | 1900 |
| iq current loop | 30 | 1900 |
| Position Regulator | Rise-Time/s | Overshoot/% | Settling Time/s |
|---|---|---|---|
| PI controller | 0.0135 | 0.34 | 0.028 |
| FO-PID | 0.0291 | 0.02 | 0.022 |
| FO-PID-FF | 0.0202 | 0.10 | 0.017 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhong, C.-Q.; Wang, L.; Xu, C.-F. Path Tracking of Permanent Magnet Synchronous Motor Using Fractional Order Fuzzy PID Controller. Symmetry 2021, 13, 1118. https://doi.org/10.3390/sym13071118
Zhong C-Q, Wang L, Xu C-F. Path Tracking of Permanent Magnet Synchronous Motor Using Fractional Order Fuzzy PID Controller. Symmetry. 2021; 13(7):1118. https://doi.org/10.3390/sym13071118
Chicago/Turabian StyleZhong, Chong-Quan, Lin Wang, and Chuan-Fang Xu. 2021. "Path Tracking of Permanent Magnet Synchronous Motor Using Fractional Order Fuzzy PID Controller" Symmetry 13, no. 7: 1118. https://doi.org/10.3390/sym13071118
APA StyleZhong, C.-Q., Wang, L., & Xu, C.-F. (2021). Path Tracking of Permanent Magnet Synchronous Motor Using Fractional Order Fuzzy PID Controller. Symmetry, 13(7), 1118. https://doi.org/10.3390/sym13071118