
The Rheological Analytical Solution and Parameter Inversion of Soft Soil Foundation


Abstract
:1. Introduction
- (1)
- A three-dimensional analytical viscoelastic deformation solution of soft soil foundations is obtained by us. Some previous studies only considered one-dimensional or two-dimensional conditions. The analytical solution in this paper is simple and has few parameters. The construction sequences and loading processes can also be considered. It shows good adaptability to engineering applications.
- (2)
- On the basis of our model, an improved quantum genetic algorithm is put forward to inverse the parameters of soft soil foundations. It provides a simple and highly efficient way to predict the long-term deformation of soft soil foundations.
2. The Viscoelastic Solutions to Soft Soil Foundations Based on Laplace Integral Transformation
2.1. Assumptions
- (1)
- It is assumed that the object is continuous, that is, the entire volume of the object is filled by the medium that composes the object, leaving no gaps and maintaining its continuity throughout the deformation process.
- (2)
- It is assumed that the object is completely elastic. After removing the external force, the object can completely restore its original shape and size. The deformation of the object corresponds to the external force it receives.
- (3)
- It is assumed that the object is uniform. All parts of the entire object have the same elastic properties.
- (4)
- It is assumed that the object is isotropic. The elastic properties are the same in all directions, regardless of the direction of investigation.
- (5)
- It is assumed that the object only has infinitesimal motion. The displacement of the object is much smaller than the size of the object.
- (1)
- Boltzmann’s superposition principle. The viscoelastic displacement of an object has linear viscoelastic behavior. The creep of the object is a function of the entire loading history. The contribution of the load applied at each stage to the final deformation is independent.
- (2)
- Elastic–viscoelastic correspondence principle. The linear viscoelastic problem is the transformed linear elastic problem in the Laplace transformed state. The viscoelastic solution can be obtained through the elastic solution and Laplace transformation.
2.2. Elastic Solution under Normal and Tangential Distributed Force
2.3. Viscoelastic Solutions Based on Laplace Integral Transformation
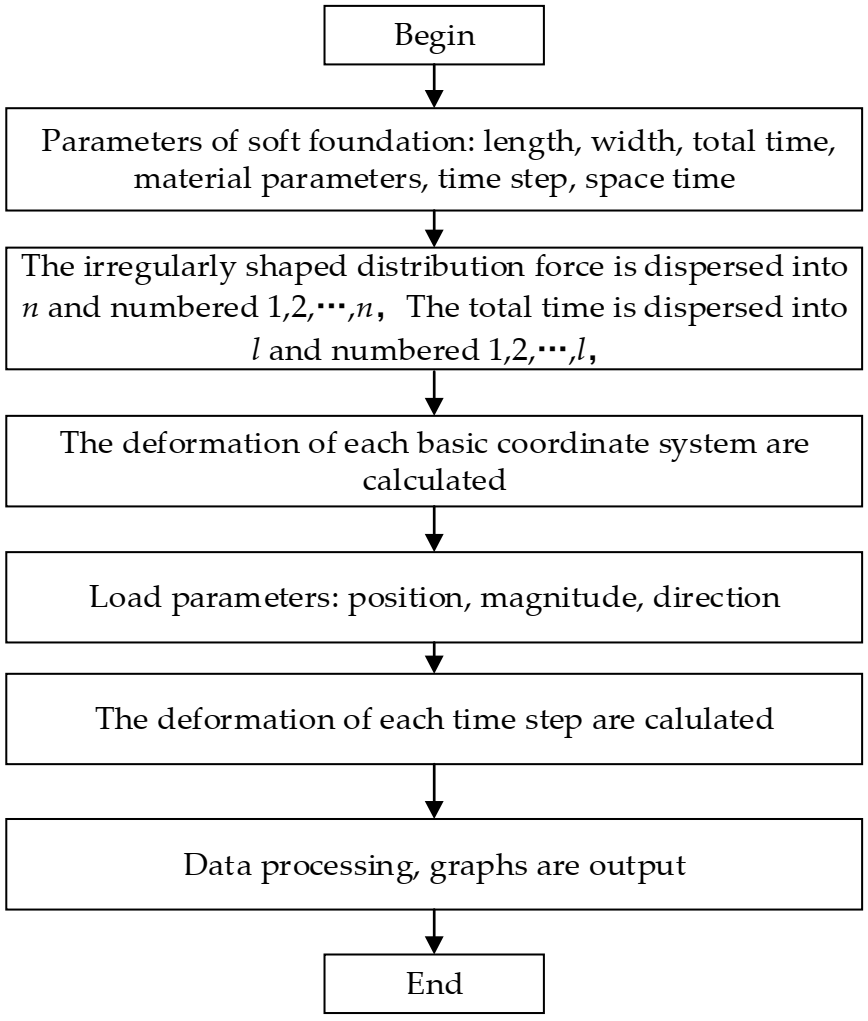
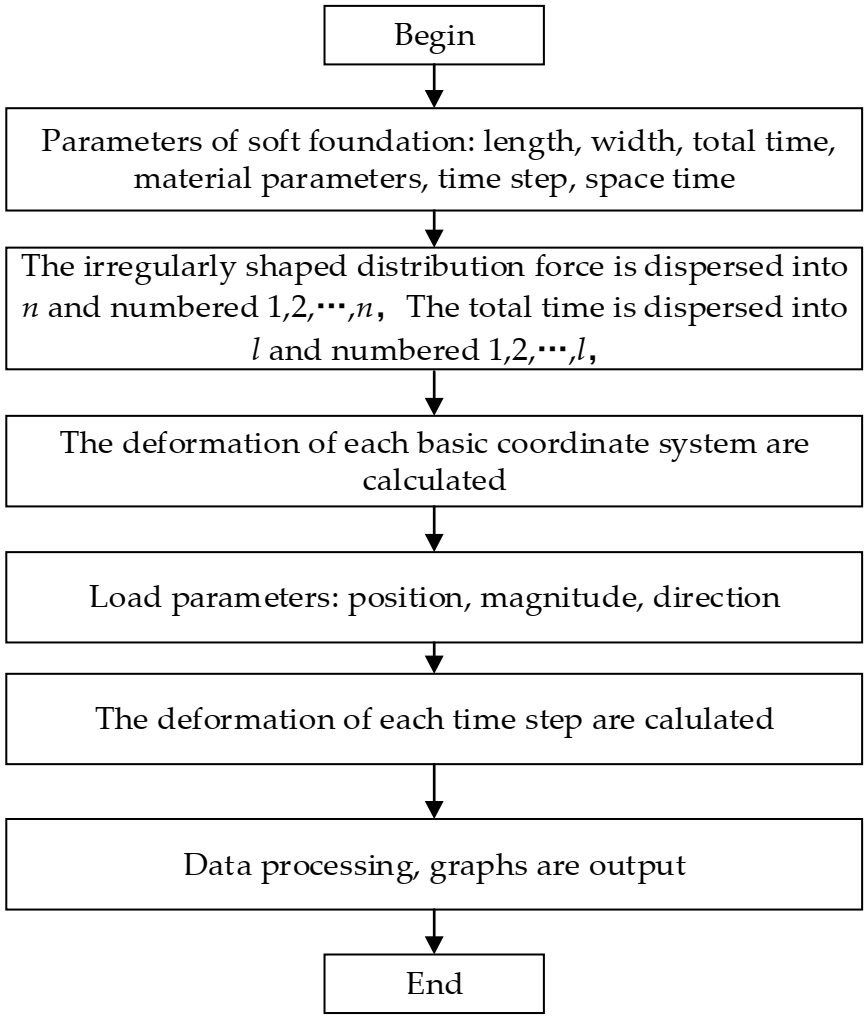
3. The Influence of Construction Sequences and Loading
- (1)
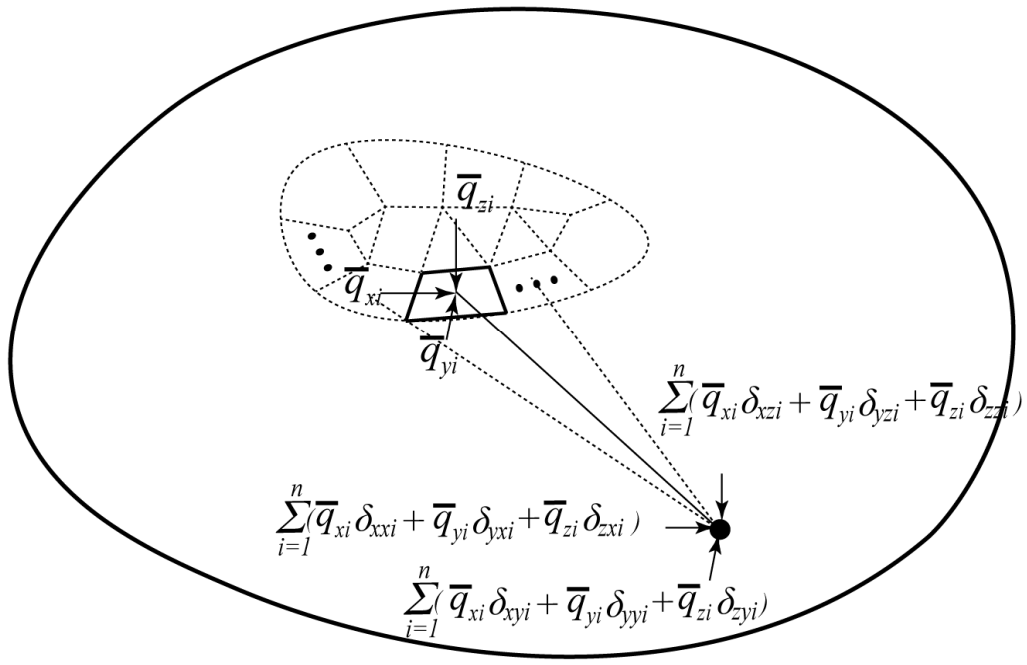
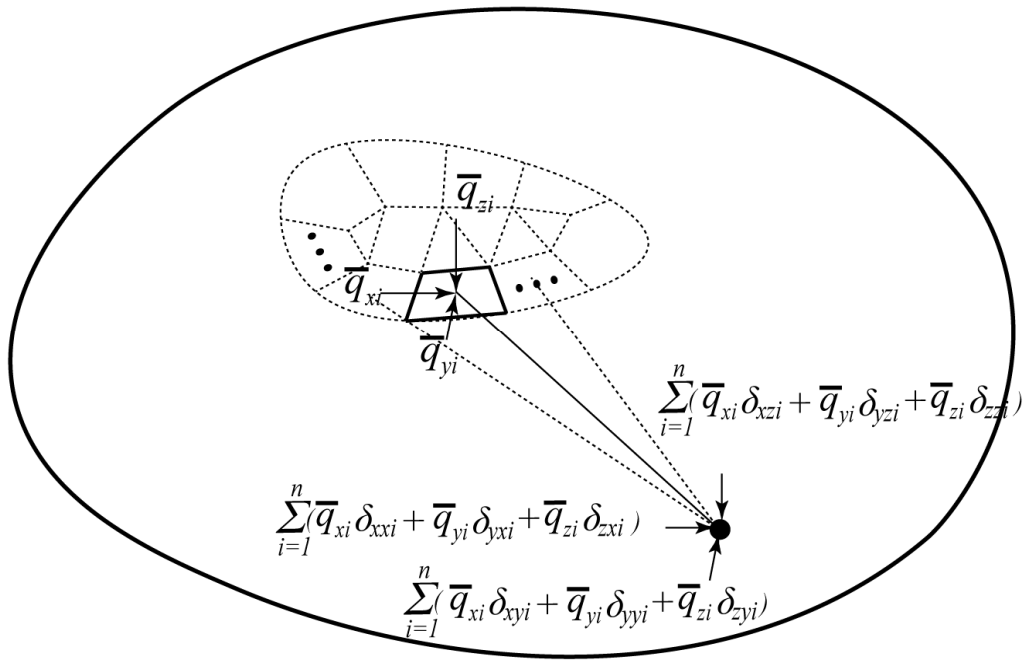
- The irregularly shaped region is dispersed into n little regions. The total time is dispersed into an l time step.
- (2)
- The irregularly shaped distribution force is dispersed into n distribution forces. The distribution forces in each region are shown as , , , where are the distribution forces in each region in the x direction; are the distribution forces in each region in the y direction; are the distribution forces in each region in the z direction.
- (3)
- The coordinate systems are set up. It takes each distributed load center point as the origin. The coordinates of the calculated position in each coordinate system are recorded as (x1,y1), (x2,y2),…, (xn,yn).
- (4)
- According to Equation (8), the deformation of each unit distribution load under each dispersed region is calculated.
- (5)
- The deformation of the calculated position on the surface under distribution force is shown as:where are the deformation of the position in the three directions; are the deformation of the calculated position in the x, y, and z directions under the first unit distribution force in the x direction; are the deformation of the calculated position in the x, y, and z directions under the first unit distribution force in the y direction; are the deformation of the calculated position in the x, y, and z directions under the first unit distribution force in the z direction; are the deformation of the calculated position in the x, y, and z directions under the nth unit distribution force in the x direction; are the deformation of the calculated position in the x, y, and z directions under the nth unit distribution force in the y direction; are the deformation of the calculated position in the x, y, and z directions under the nth unit distribution force in the z direction.
4. The Parameter Inversion of Soft Soil Foundations
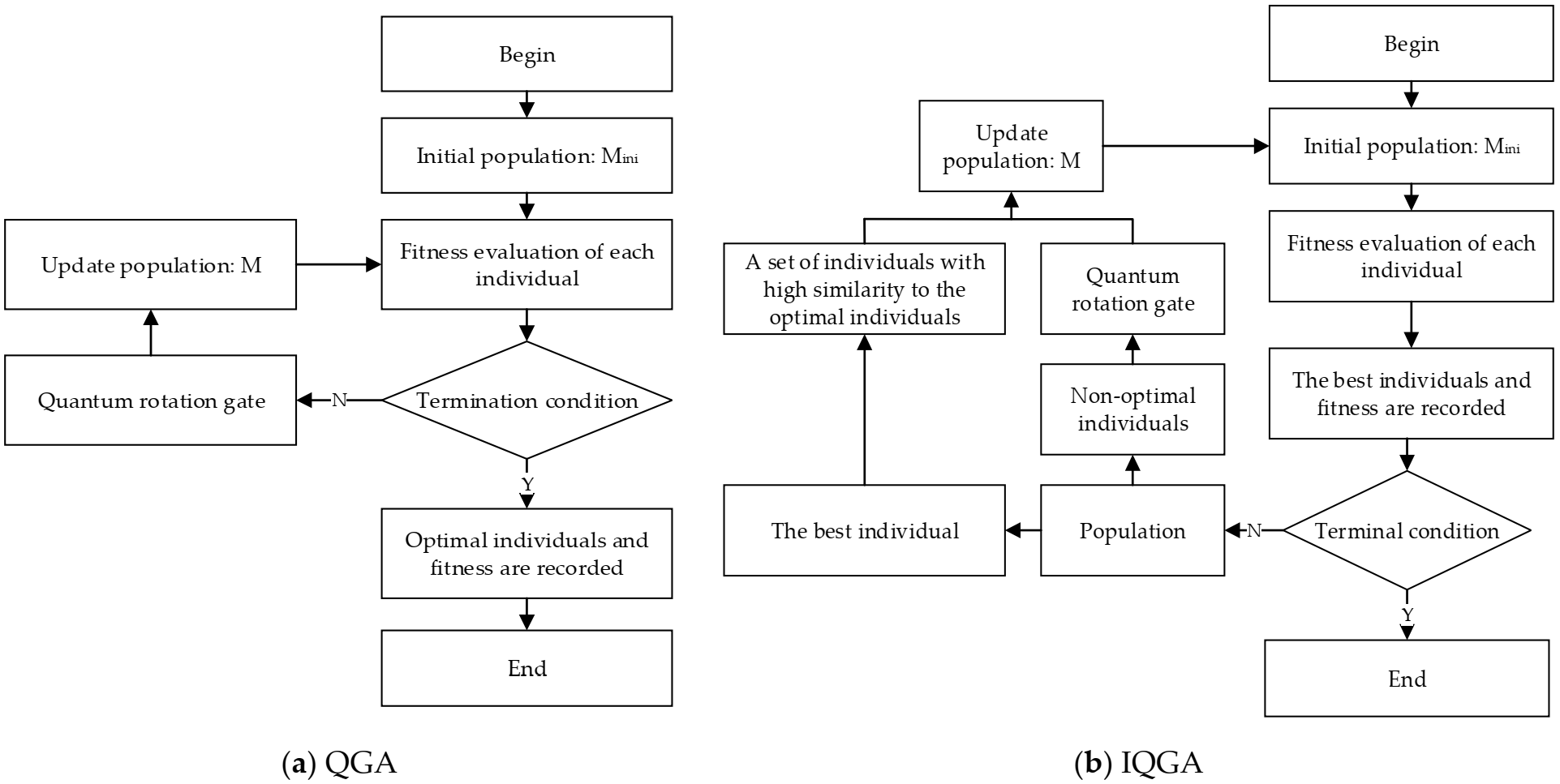
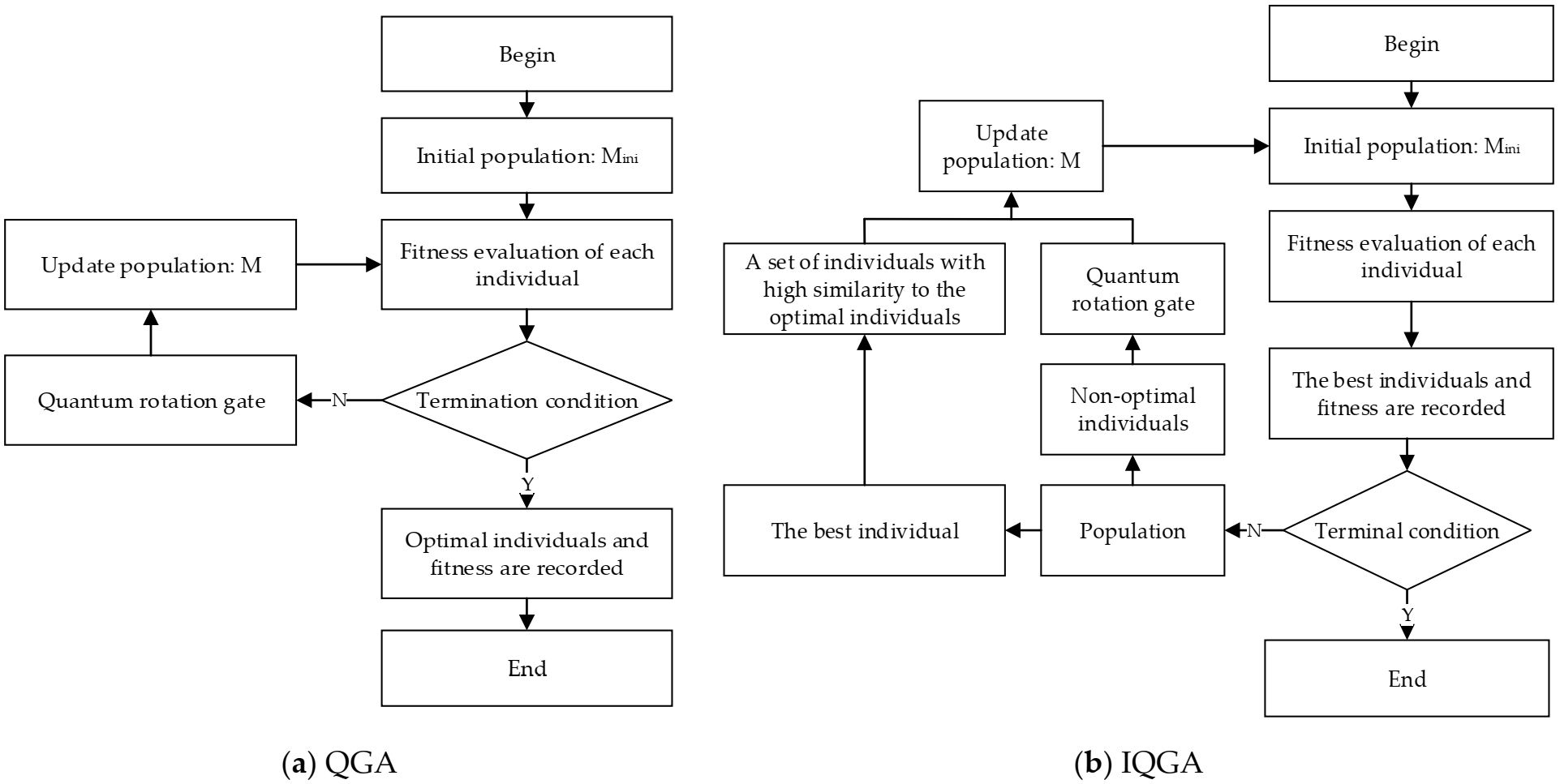
4.1. Quantum Genetic Algorithm
4.2. Soft Soil Foundation Parameter Inversion Model
4.3. Improved Quantum Genetic Algorithm
- (1)
- In each generation calculation, some individuals, similar to the optimal individuals of the previous generation, are formed so that individuals with certain guiding effects are produced in the next generation. The number of similar individuals, N, can be decided as shown:
- (2)
- The rotation angle is not a constant. The rotation angle is a big value when the number of generations is small. The rotation angle is a small value when the number of generations is big. It can be shown as:
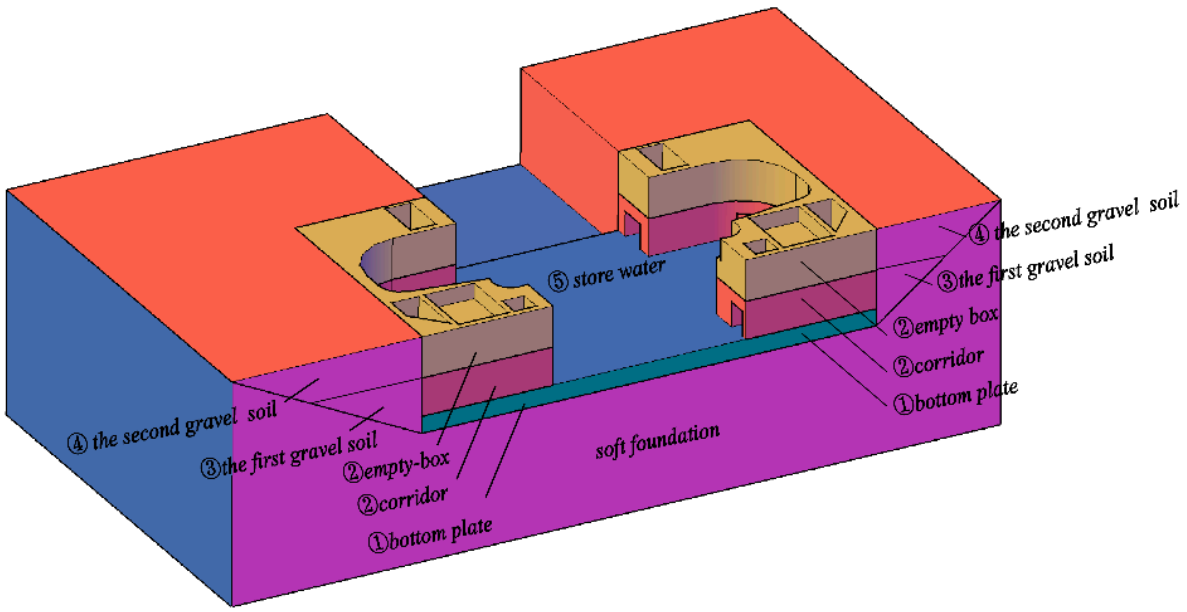
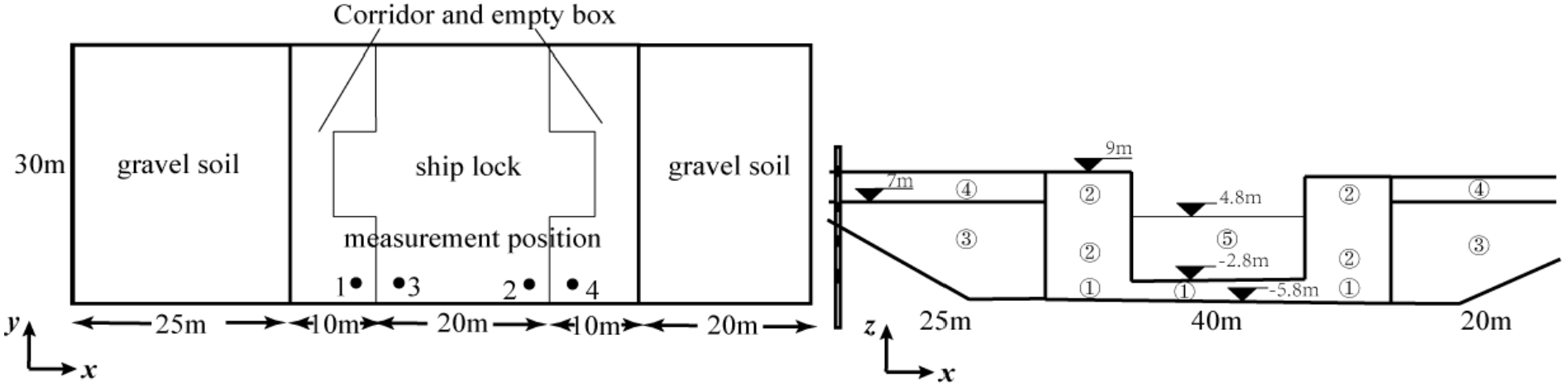
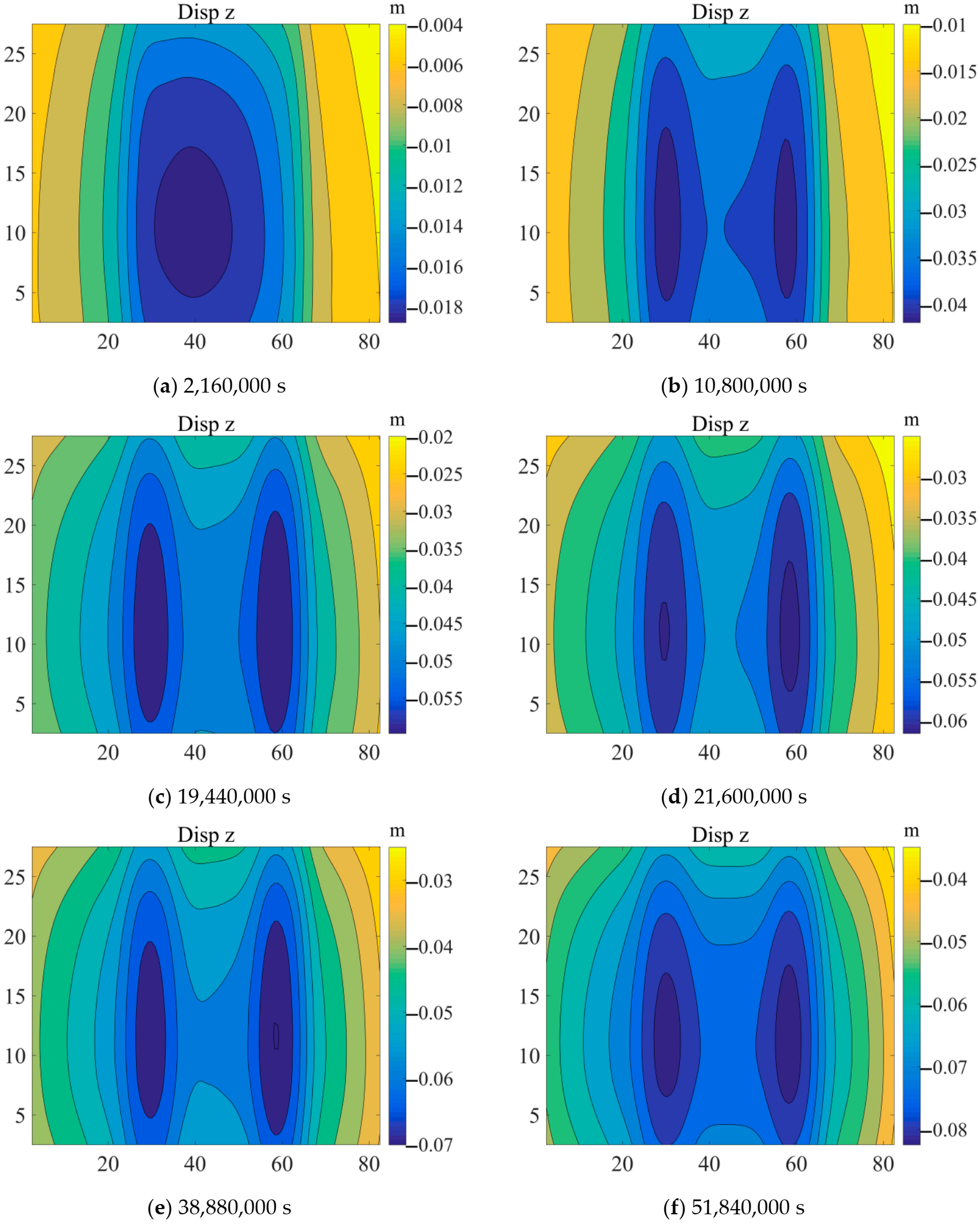
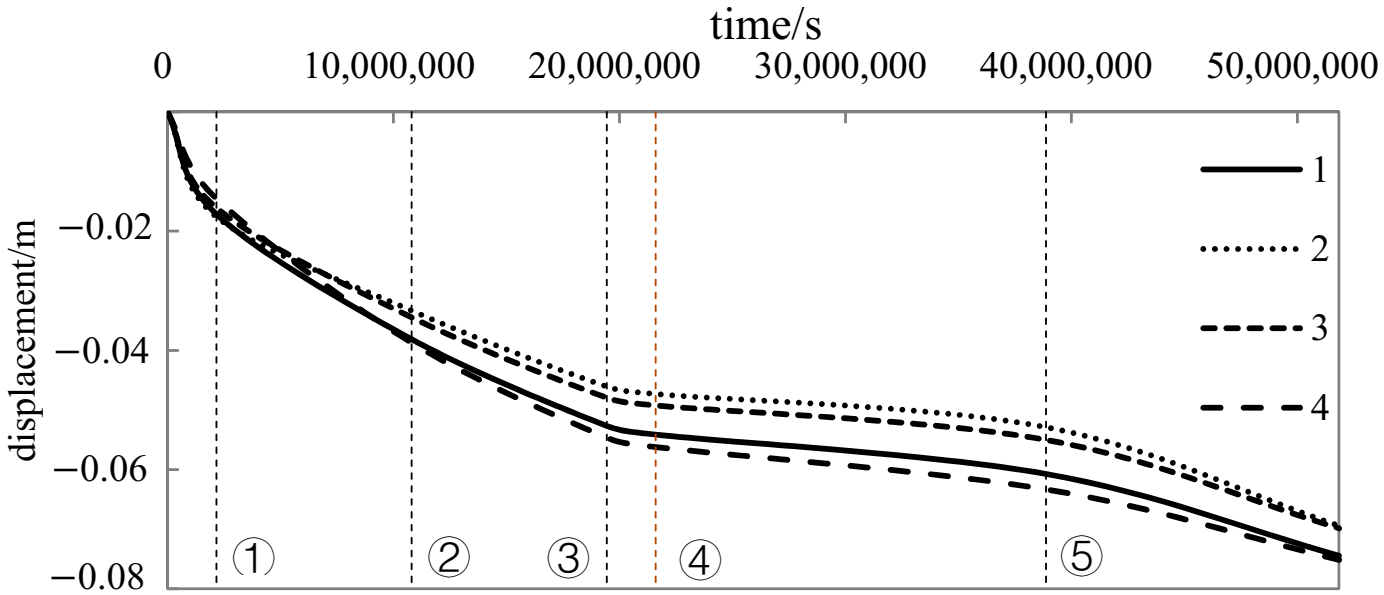
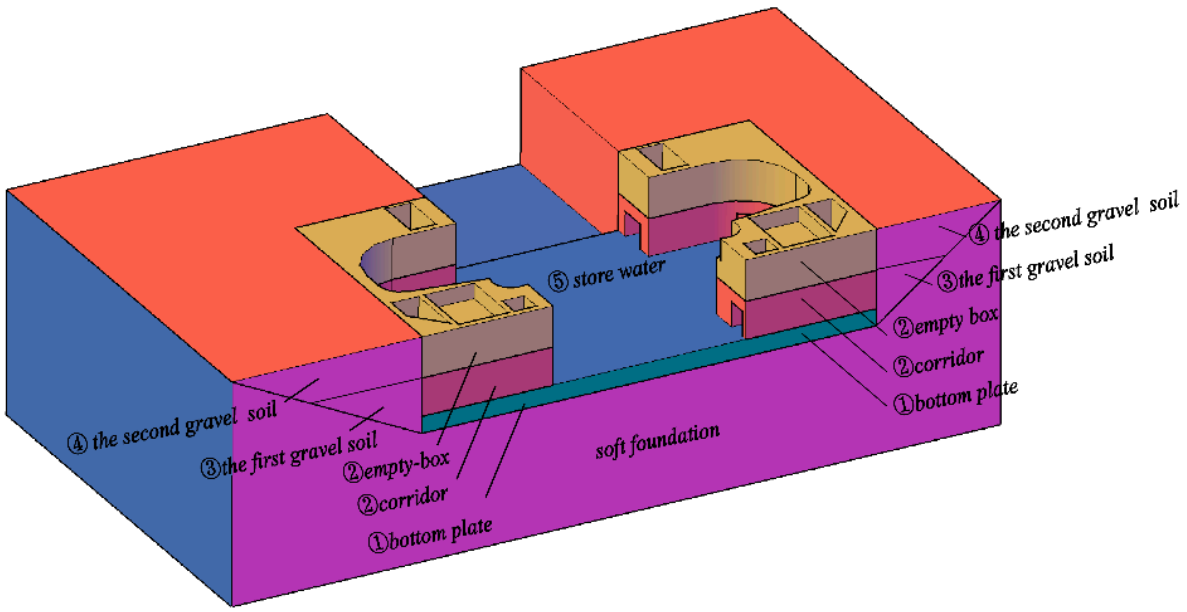
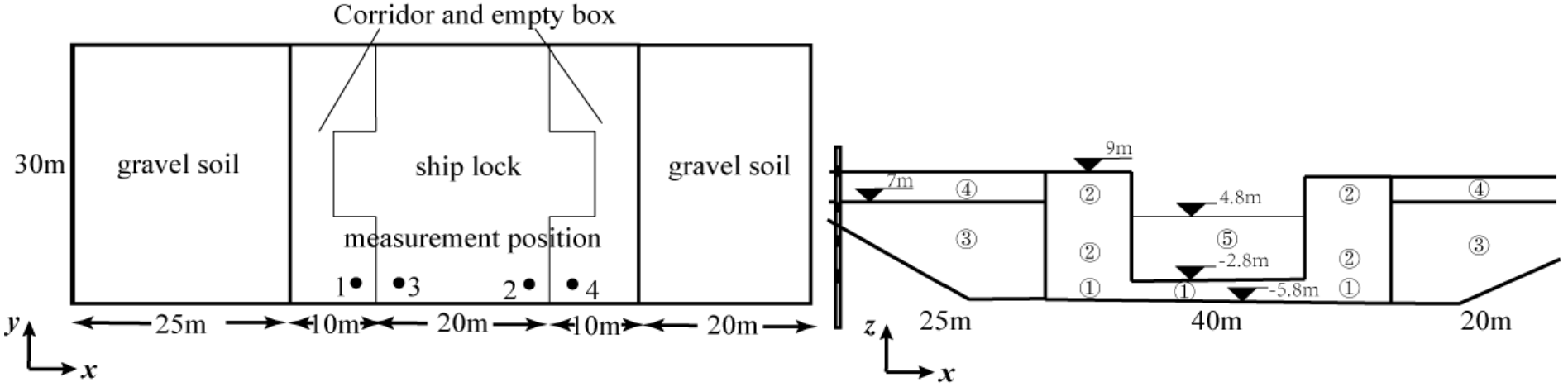
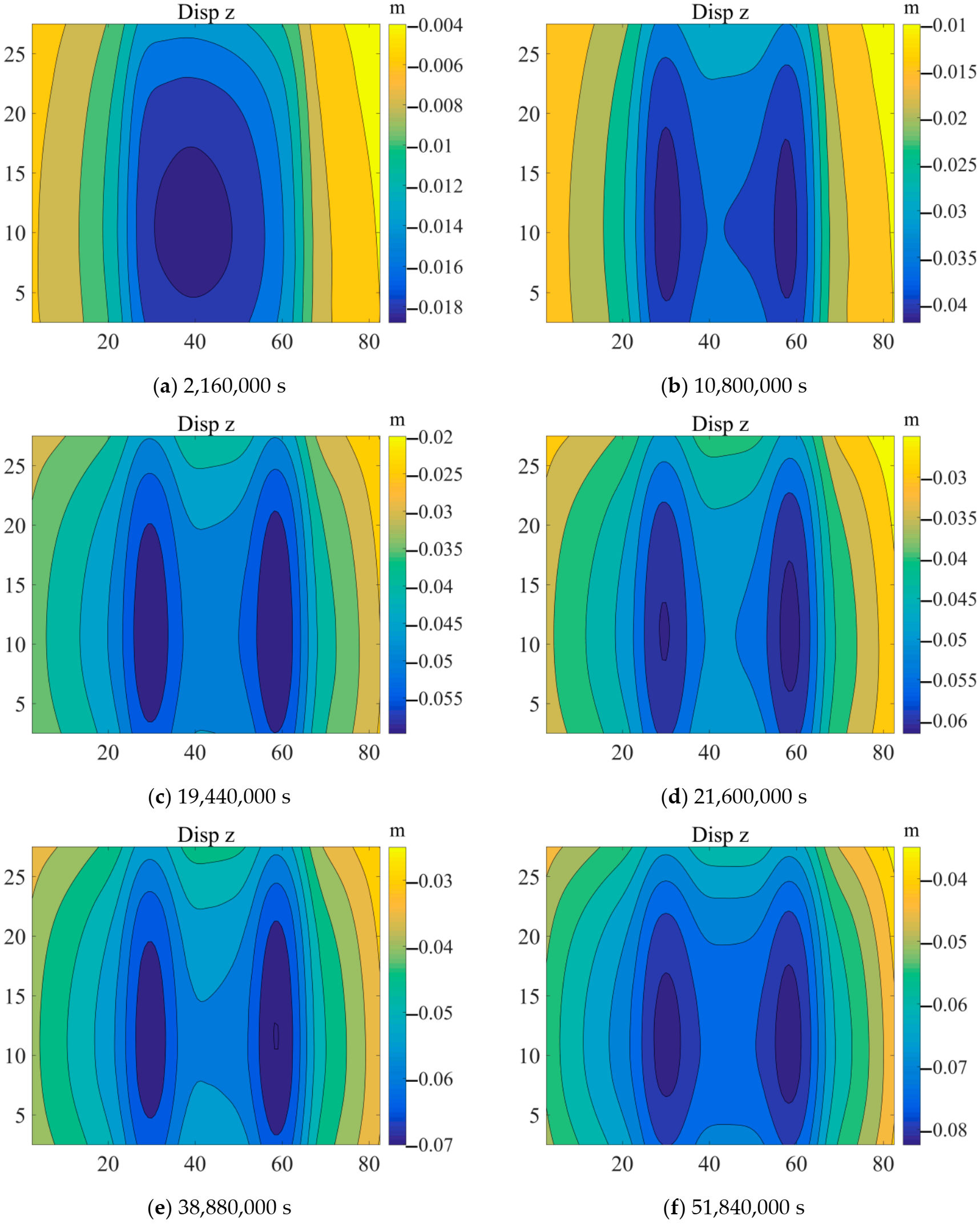
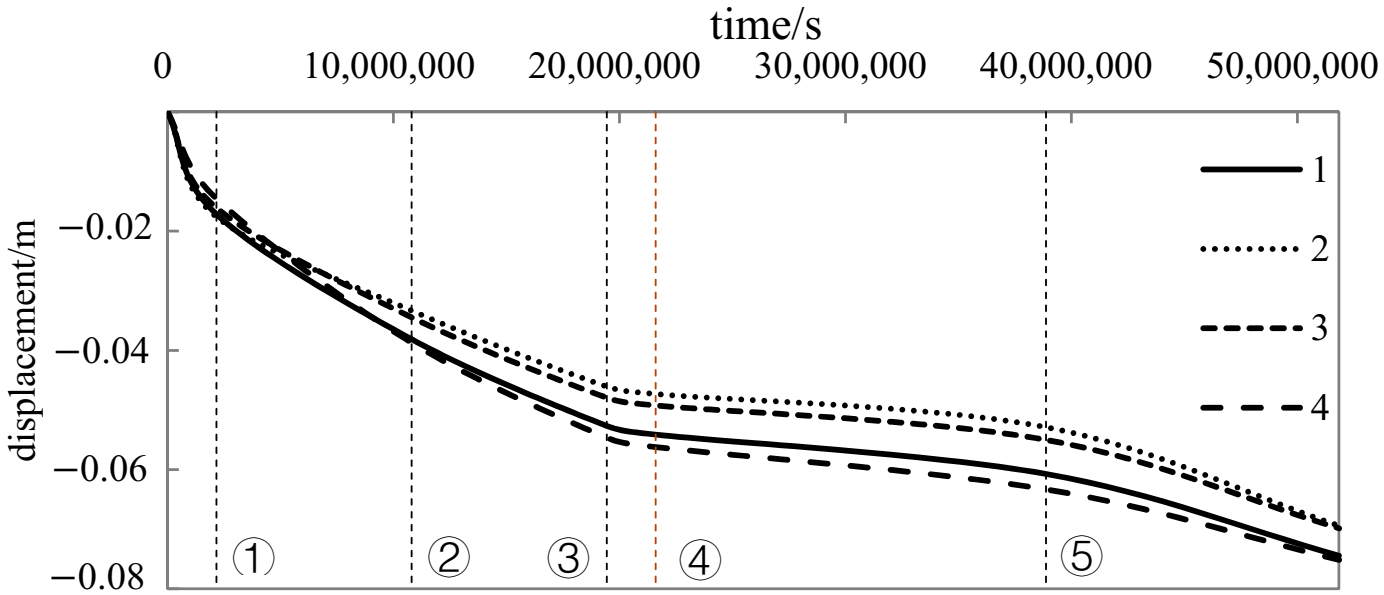
5. Case Study
6. Conclusions
- (1)
- The viscoelastic solution of soft soil is based on calculus theory, Laplace integral transformation, and finite theory. The model is simple and has few parameters. The error between the predicted value and the measured value is acceptable.
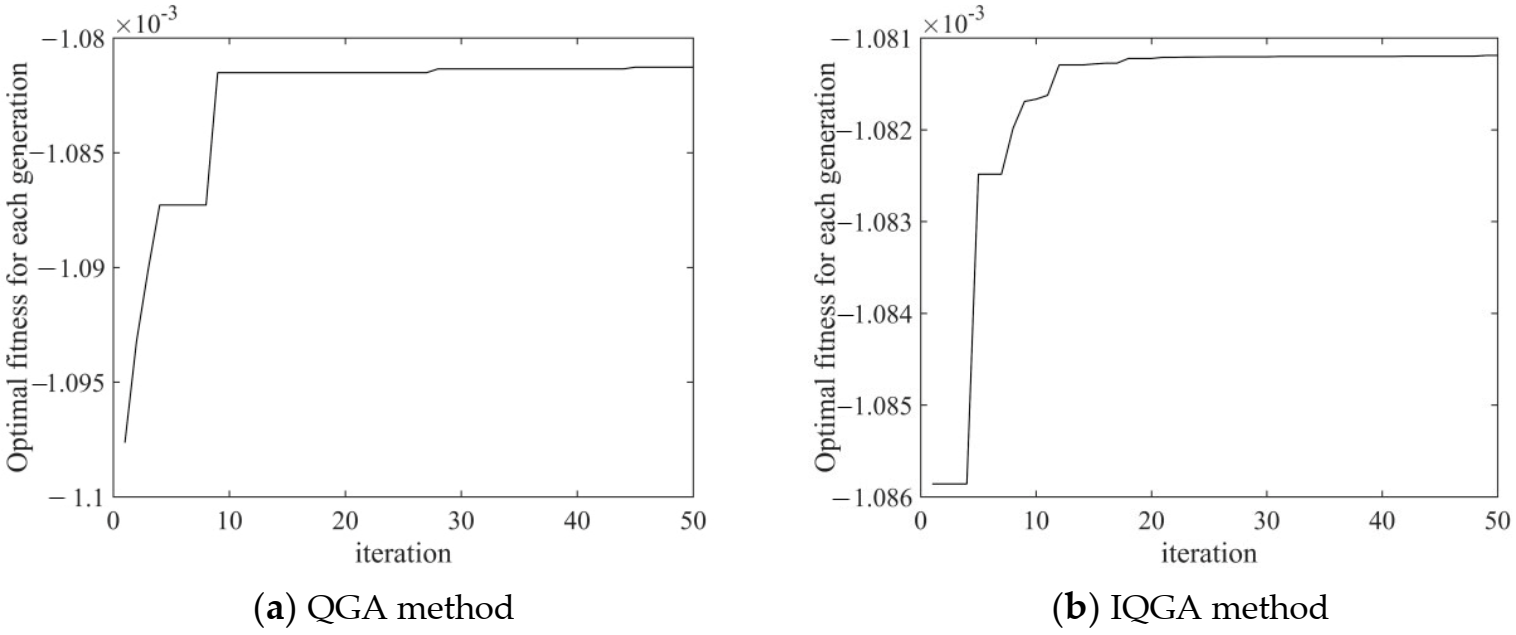
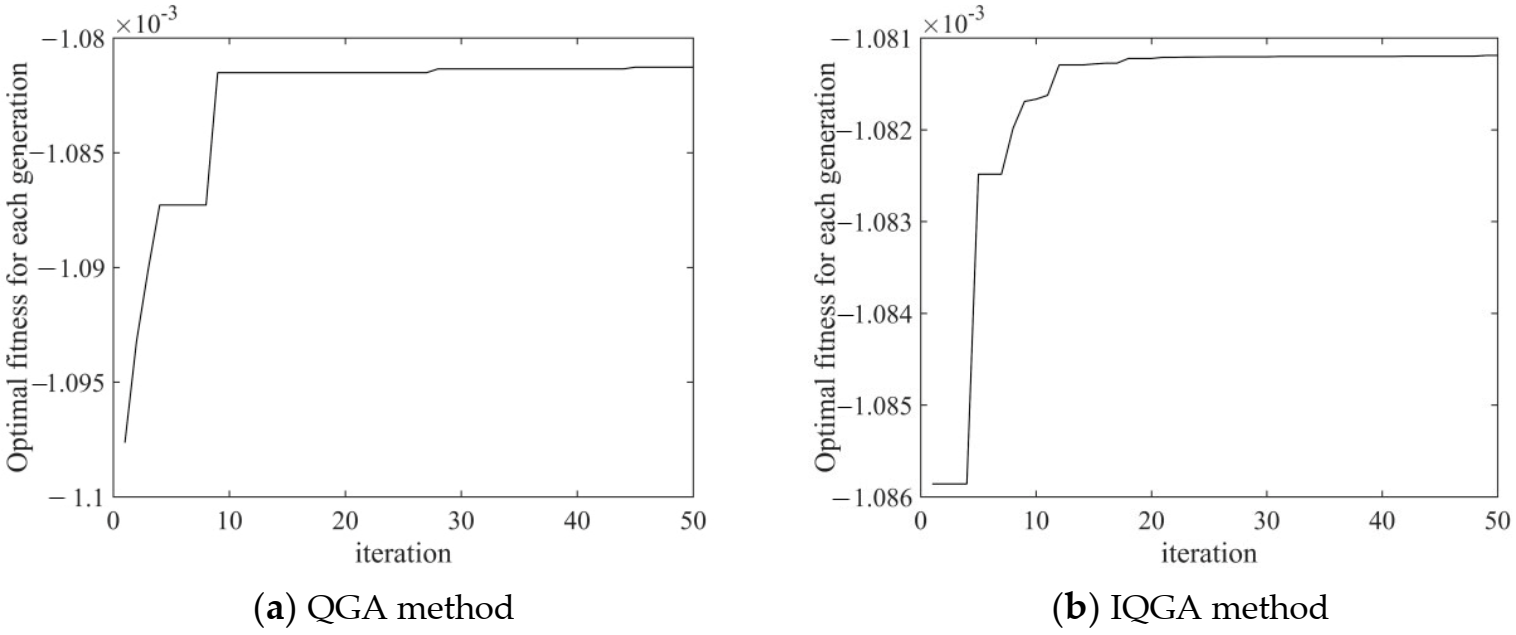
- (2)
- The improved quantum genetic algorithm has a faster convergence speed than the quantum genetic algorithm. It is well applied to engineering.
- (3)
- The case shows that this method can be well appropriated for inversing the parameters of soft soil foundations and predicting the long-term uneven settlement deformation of buildings on soft soil foundations. It can be widely used in soft soil engineering.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Arora, K.R. Soil Mechanics and Foundation Engineering, 6th ed.; Lomus Offset Press: Delhi, India, 2006; pp. 587–635. [Google Scholar]
- Keedwell, M. Rheology and Soil Mechanics; Elsevier Applied Science: London, UK, 1984; pp. 67–69. [Google Scholar]
- Wang, R.; Xu, W.; Meng, Y.; Chen, H.; Zhou, Z. Numerical analysis of long-term stability of left bank abutment high slope at Jinping I hydropower station. Chin. J. Rock Mech. Eng. 2014, 33, 105–3113. [Google Scholar] [CrossRef]
- Barden, L. Consolidation of clay with non-linear viscosity. Geotechnique 1965, 15, 345–362. [Google Scholar] [CrossRef]
- Bjerrum, L. Engineering geology of Norwegian normally-consolidated marine clays as related to settlements of buildings. Geotechnique 1967, 17, 83–118. [Google Scholar] [CrossRef] [Green Version]
- Tjong-Kie, T. Determination of the rheological parameters and the hardening coefficients of Clays. In Rheology and Soil Mechanics/Rhéologie et Mécanique des Sols; Springer: Berlin/Heidelberg, Germany, 1966; pp. 256–272. [Google Scholar]
- Berre, T.; Iversen, K. Oedometer test with different specimen heights on a clay exhibiting large secondary compression. Geotechnique 1972, 22, 53–70. [Google Scholar] [CrossRef]
- Perzyna, P. Fundamental problems in viscoplasticity. Adv. Appl. Mech. 1966, 9, 243–377. [Google Scholar] [CrossRef]
- Su, C.; Zhang, H.; Hu, S.; Bai, J.; Dai, J. Combining Finite Element and Analytical methods to Contact Problems of 3D Structure on Soft Foundation. Math. Probl. Eng. 2020, 2020, 8827681. [Google Scholar] [CrossRef]
- Wang, L.; Wang, L. Semianalytical analysis of creep and thermal consolidation behaviors in layered saturated clays. Int. J. Geomech. 2020, 20, 06020001. [Google Scholar] [CrossRef]
- Borja, R.I. Generalized creep and stress relaxation model for clays. J. Geotech. Eng. 1992, 118, 1765–1786. [Google Scholar] [CrossRef]
- Yin, Z.Y.; Chang, C.S.; Karstunen, M.; Hicher, P.-Y. An anisotropic elastic–viscoplastic model for soft clays. Int. J. Solids Struct. 2010, 47, 665–677. [Google Scholar] [CrossRef] [Green Version]
- Alshamrani, M.A.; Sture, S. A time-dependent bounding surface model for anisotropic cohesive soils. Soils Found. 1998, 38, 61–76. [Google Scholar] [CrossRef] [Green Version]
- Adachi, T.; Oka, F.; Mimura, M. Mathematical structure of an overstress elasto-viscoplastic model for clay. Soils Found. 1987, 27, 31–42. [Google Scholar] [CrossRef] [Green Version]
- Singh, A.; Mitchell, J.K. General stress-strain-time function for soils. J. Soil Mech. Found. Div. 1968, 94, 21–46. [Google Scholar] [CrossRef]
- Ji, W.; Liu, X.; Qi, H.; Liu, X.; Lin, C.; Li, T. Mechanical Parameter Identification of Hydraulic Engineering with the Improved Deep Q-Network Algorithm. Math. Probl. Eng. 2020, 2020, 6404819. [Google Scholar] [CrossRef]
- Lin, C.; Li, T.; Chen, S.; Lin, C.; Liu, X.; Gao, L.; Sheng, T. Structural identification in long-term deformation characteristic of dam foundation using meta-heuristic optimization techniques. Adv. Eng. Softw. 2020, 148, 102870. [Google Scholar] [CrossRef]
- Chen, S.; Gu, C.; Lin, C.; Zhao, E.; Song, J. Safety monitoring model of a super-high concrete dam by using RBF neural network coupled with kernel principal component analysis. Math. Probl. Eng. 2018, 2018, 1712653. [Google Scholar] [CrossRef] [Green Version]
- Lin, C.; Li, T.; Chen, S.; Liu, X.; Lin, C.; Liang, S. Gaussian process regression-based forecasting model of dam deformation. Neural Comput. Appl. 2019, 31, 8503–8518. [Google Scholar] [CrossRef]
- Narayanan, A.; Moore, M. Quantum-inspired genetic algorithms. In Proceedings of the IEEE International Conference on Evolutionary Computation, Nagoya, Japan, 20–22 May 1996; pp. 61–66. [Google Scholar] [CrossRef]
- Grover, L.K. A fast quantum mechanical algorithm for database search. In Proceedings of the Twenty-Eighth Annual ACM Symposium on Theory of Computing, Philadelphia, PA, USA, 22–24 May 1996; Association for Computing Machinery: New York, NY, USA, 1996. [Google Scholar]
- Draa, A.; Meshoul, S.; Talbi, H.; Batouche, M. A quantum-inspired differential evolution algorithm for solving the N-queens problem. Neural Netw. 2011, 1, 21–27. [Google Scholar] [CrossRef] [Green Version]
- Ma, S.; Jin, W. A new parallel quantum genetic algorithm with probability-gate and its probability analysis. In Proceedings of the 2007 International Conference on Intelligent Systems and Knowledge Engineering, Chengdu, China, 15–16 October 2007; Atlantis Press: Paris, France, 2007. [Google Scholar] [CrossRef] [Green Version]
- Laboudi, Z.; Chikhi, S. Comparison of genetic algorithm and quantum genetic algorithm. Int. Arab J. Inf. Technol. 2012, 9, 243–249. [Google Scholar]
- Zhiber, A.V.; Startsev, S.Y. Integrals, solutions, and existence problems for Laplace transformations of linear hyperbolic systems. Math. Notes 2003, 74, 803–811. [Google Scholar] [CrossRef]
- Yüce, A.; Tan, N. On the approximate inverse Laplace transform of the transfer function with a single fractional order. Trans. Inst. Meas. Control 2021, 43, 1376–1384. [Google Scholar] [CrossRef]
- Ender, A.Y.; Énder, I.A.; Bakaleinikov, L.A.; Flegontova, E.Y. Construction of kernels of the nonlinear collision integral in the Boltzmann equation using laplace transformation. Tech. Phys. 2012, 57, 735–742. [Google Scholar] [CrossRef]
- Kim, Y.; Kim, B.M.; Jang, L.-C.; Kwon, J. A Note on Modified Degenerate Gamma and Laplace Transformation. Symmetry 2018, 10, 471. [Google Scholar] [CrossRef] [Green Version]
- Zhou, F.; Wang, L.; Liu, H. A fractional elasto-viscoplastic model for describing creep behavior of soft soil. Acta Geotech. 2021, 16, 67–76. [Google Scholar] [CrossRef]
- Varghese, V.; Bhoyar, S.; Khalsa, L. Thermoelastic response of a nonhomogeneous elliptic plate in the framework of fractional order theory. Arch. Appl. Mech. 2021, 91, 3223–3246. [Google Scholar] [CrossRef]
- Magdy, A.E. Analytical study of two-dimensional thermo-mechanical responses of viscoelastic skin tissue with temperature-dependent thermal conductivity and rheological properties. Mech. Based Des. Struct. Mach. 2021, 1–19. [Google Scholar] [CrossRef]
- Davis, R.; Selvadurai, A.; Pacheo, M. Elasticity and Geomechanics; Cambridge University Press: Cambridge, UK, 1998; p. 157. [Google Scholar]
- Chen, E.Y.; Pan, E.; Green, R. Surface loading of a multilayered viscoelastic pavement: Semianalytical solution. J. Eng. Mech. 2009, 135, 517–528. [Google Scholar] [CrossRef] [Green Version]
- Su, C.; Jiang, H.D.; Tan, E.H. An inverse analysis method for foundation parameters and its application based on viscoelastic foundation beam computation. Chin. J. Geotech. Eng. 2000, 22, 186–189. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Construction Processes | Time | Loads | ||||
|---|---|---|---|---|---|---|
| Backfill in West (N/m2) | Bottom Plate in West (N/m2) | Middle Plate (N/m2) | Bottom Plate in East (N/m2) | Backfill in East (N/m2) | ||
| ① Bottom plate | 2,160,000 s | 0 | 72,000 | 72,000 | 72,000 | 0 |
| ② Corridor and empty-box | 10,800,000 s | 0 | 236,000 | 72,000 | 200,000 | 0 |
| ③ First gravel | 19,440,000 s | 68,000 | 236,000 | 72,000 | 200,000 | 68,000 |
| ④ Second gravel | 21,600,000 s | 102,000 | 236,000 | 72,000 | 200,000 | 102,000 |
| ⑤ Store water | 38,880,000 s | 102,000 | 236,000 | 132,000 | 200,000 | 102,000 |
| Parameters | Range |
|---|---|
| 0.15 ~ 0.40 | |
| Population size | 40 |
| Maximum generation | 50 |
| Position | Data | Time | |||||
|---|---|---|---|---|---|---|---|
| 2,160,000 s | 10,800,000 s | 19,440,000 s | 21,600,000 s | 38,880,000 s | 51,840,000 s | ||
| 1 | Measured | −0.0192 | −0.0399 | −0.0542 | −0.0548 | −0.0609 | −0.0721 |
| QGA | −0.0171 | −0.0381 | −0.0527 | −0.0541 | −0.0607 | −0.0744 | |
| IQGA | −0.0169 | −0.0378 | −0.0526 | −0.0541 | −0.0608 | −0.0744 | |
| 2 | Measured | −0.0191 | −0.0378 | −0.0619 | −0.0631 | −0.0793 | −0.0850 |
| QGA | −0.0176 | −0.0333 | −0.0461 | −0.0473 | −0.0529 | −0.0694 | |
| IQGA | −0.0173 | −0.0331 | −0.0461 | −0.0473 | −0.0530 | −0.0694 | |
| 3 | Measured | −0.0173 | −0.0302 | −0.0404 | −0.0400 | −0.0467 | −0.0599 |
| QGA | −0.0161 | −0.0345 | −0.0479 | −0.0492 | −0.0550 | −0.0698 | |
| IQGA | −0.0160 | −0.0343 | −0.0479 | −0.0492 | −0.0550 | −0.0699 | |
| 4 | Measured | −0.0177 | −0.0314 | −0.0430 | −0.0435 | −0.0589 | −0.0638 |
| QGA | −0.0145 | −0.0387 | −0.0546 | −0.0562 | −0.0633 | −0.0751 | |
| IQGA | −0.0145 | −0.0386 | −0.0547 | −0.0563 | −0.0635 | −0.0754 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, H.; Su, C.; Bai, J.; Yuan, R.; Ma, Y.; Wang, W. The Rheological Analytical Solution and Parameter Inversion of Soft Soil Foundation. Symmetry 2021, 13, 1228. https://doi.org/10.3390/sym13071228
Zhang H, Su C, Bai J, Yuan R, Ma Y, Wang W. The Rheological Analytical Solution and Parameter Inversion of Soft Soil Foundation. Symmetry. 2021; 13(7):1228. https://doi.org/10.3390/sym13071228
Chicago/Turabian StyleZhang, Heng, Chao Su, Jiawei Bai, Rongyao Yuan, Yujun Ma, and Wenjun Wang. 2021. "The Rheological Analytical Solution and Parameter Inversion of Soft Soil Foundation" Symmetry 13, no. 7: 1228. https://doi.org/10.3390/sym13071228
APA StyleZhang, H., Su, C., Bai, J., Yuan, R., Ma, Y., & Wang, W. (2021). The Rheological Analytical Solution and Parameter Inversion of Soft Soil Foundation. Symmetry, 13(7), 1228. https://doi.org/10.3390/sym13071228