1. Introduction
There are many definitions of fractional derivatives that have been formulated according to two basic conceptions: one of a global (classical) nature and the other of a local nature. Under the first formulation, the fractional derivative is defined as an integral, Fourier, or Mellin transformation, which provides its non-local property with memory. The second conception is based on a local definition through certain incremental ratios. This global conception is associated with the appearance of the fractional calculus itself and dates back to the pioneering works of important mathematicians, such as Euler, Laplace, Lacroix, Fourier, Abel, and Liouville, until the establishment of the classical definitions of Riemann–Liouville and Caputo.
Until relatively recently, the study of these fractional integrals and derivatives was limited to a purely mathematical context; however, in recent decades, their applications in various fields of natural Sciences and technology, such as fluid mechanics, biology, physics, image processing, or entropy theory, have revealed the great potential of these fractional integrals and derivatives [
1,
2,
3,
4,
5,
6,
7,
8,
9]. Furthermore, the study from the theoretical and practical point of view of the elements of fractional differential equations has become a focus for interested researchers [
10,
11,
12,
13,
14,
15].
The
q-difference equations (qDifEqs) were first proposed by Jackson in 1910 [
16]. After that, qDifEqs were investigated in various studies [
17,
18,
19,
20,
21,
22,
23,
24]. On the contrary, integro-differential equations (InDifEqs) have been recently studied via various fractional derivatives and formulations based on the original idea of qDifEqs (see [
25,
26,
27,
28,
29,
30,
31,
32]). The concept of symmetry and
q-difference equations are connected to each other while theoretically investigating the differential equation symmetries.
The solution existence and uniqueness for the fractional qDifEqs were investigated in 2012 by Ahmad et al. as:
with boundary conditions (B.Cs):
where
,
,
are real numbers, for
and
[
20]. The
q-integral problem was studied in in 2013 by Zhao et al. as:
with B.Cs:
and
almost ∀
, where
,
,
,
,
is positive real number, and
is the
q-derivative of Riemann–Liouville (RL) and the real values continuous map
u defined on
[
24]. The problem:
was investigated in 2014 by Ahmad et al. with B.Cs:
and
where
,
is the Caputo fractional
q-derivative (CpFqDr),
,
represents the RL integral with
,
f and
g are given continuous functions,
and
are real constants,
and
for
[
19]. The solutions’ existence was studied in 2019 by Samei et al. for some multi-term
q-integro-differential equations with non-separated and initial B.Cs ([
23]).
Inspired by all previous works, we investigate in this work the positive solutions for the singular fractional
q-differential equation (SFqDEqs) as follows:
with the B.Cs:
,
and
, where
,
is the RL
q-integral of order
for the given function:
u, here
,
,
,
,
,
,
is continuous,
that is,
h is singular at
, and
represents the CpFqDr of order
,
.
This work is divided into the following: some essential notions and basic results of
q-calculus are reviewed in
Section 2. Our original important results are stated in
Section 3. In
Section 4, illustrative numerical examples are provided to validate the applicability of our main results.
2. Essential Preliminaries
Assume that
and
. Define
[
16]. The power function:
with
is written as:
for
and
, where
x and
y are real numbers and
([
17]). In addition, for
and
, we obtain:
If
, then it is obvious that
. The
q-Gamma function is expressed by
where
([
16]). We know that
. The value of the
q-Gamma function,
, for input values
q and
z with counting the sentences’ number
n in summation by simplification analysis. A pseudo-code is constructed for estimating
q-Gamma function of order
n. The
q-derivative of function
w, is expressed as:
and
([
17]). In addition, the higher order
q-derivative of a function
w is defined by
for all
, where
([
17,
18]). The
q-integral of a function
f defined on
is expressed as:
for
, provided that the series is absolutely convergent ([
17,
18]). If
a in
, then we have:
if the series exists. The operator
is given by
and
for
and
([
17,
18]). It is proven that
and
whenever
w is continuous at
([
17,
18]). The fractional RL type
q-integral of the function
w on
J for
is defined by
, and
for
and
([
22,
33]). In addition, the CpFqDr of a function
w is expressed as:
where
and
([
22]). It is proven that
where
([
22]).
Some essential notions and lemmas are now presented as follows: In our work, and are denoted by and , respectively, where .
Lemma 1 ([
34])
. If with , thenwhere n is the smallest integer , and is some real number. Here, we restate the well-known Arzelá–Ascoli theorem. Assume that is a sequence of bounded and equicontinuous real valued functions on . Then, S has a uniformly convergent subsequence. We need the following fixed point theorem in our main result:
Lemma 2 ([
35])
. Assume that is a Banach space, is a cone, and , are two bounded open balls of centered at the origin with . Assume that is a completely continuous operator such that either for all and for all , or for each and for . Then, Ω has a fixed point in . 4. Illustrative Examples with Application
Some illustrative examples are provided in this section to validate our original results. At the same time, a computational technique is constructed for testing the problem (
1) and (
2). A simplified analysis is also studied for executing the
q-Gamma function’s values. As a result, a pseudo-code that describes our simplified method is presented for calculating the
q-Gamma function of order
n in Algorithm A1 (for more details, see the following online resources:
https://en.wikipedia.org/wiki/Q-gamma_function and
https://www.dm.uniba.it/members/garrappa/software, accessed on 10 March 2021).
When the analytical solution is impossible to find for certain problems, we need to find the numerical approximation with a tiny step
h via the implicit trapezoidal PI rule, which usually shows excellent accuracy [
36]. Our numerical experiments were performed with the help of MATLAB software. Some additional supporting information are provided in
Appendix A of this paper including some algorithms of the proposed method (see Algorithms A1–A5), and
Table A1,
Table A2 and
Table A3 present various numerical experiments to provide additional support to the validity of our results in this work.
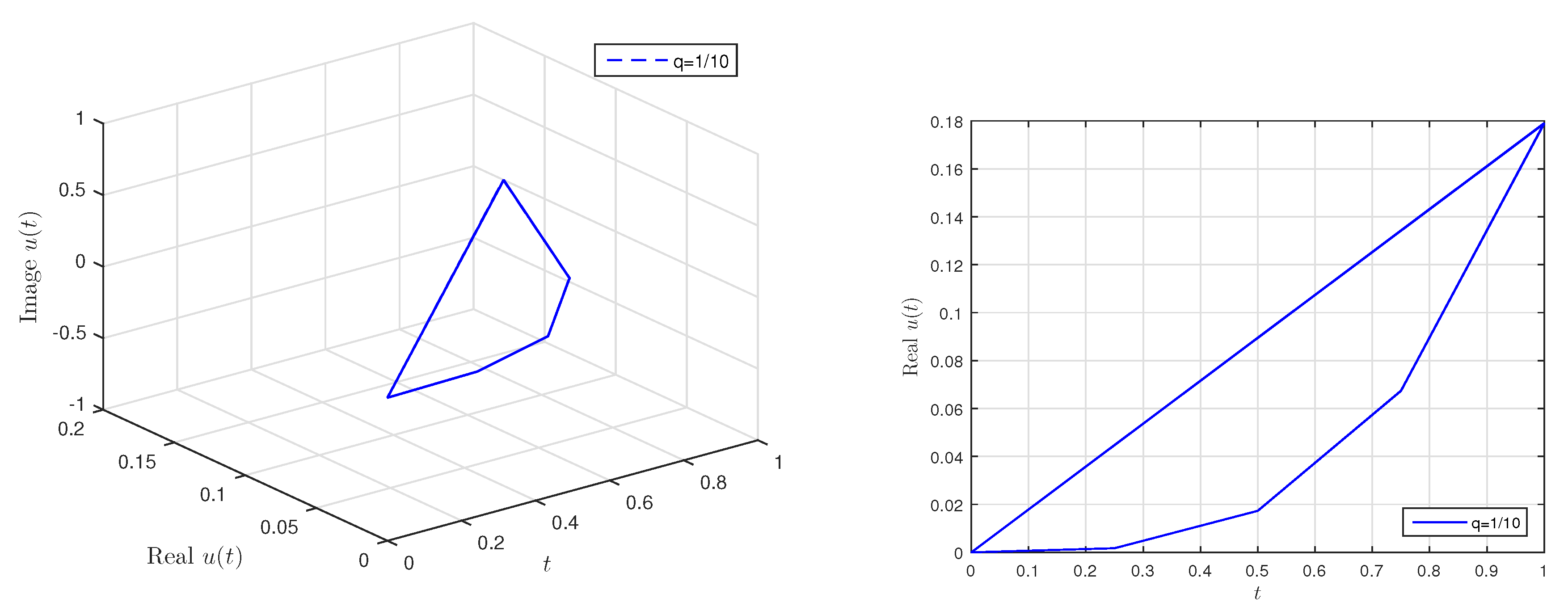
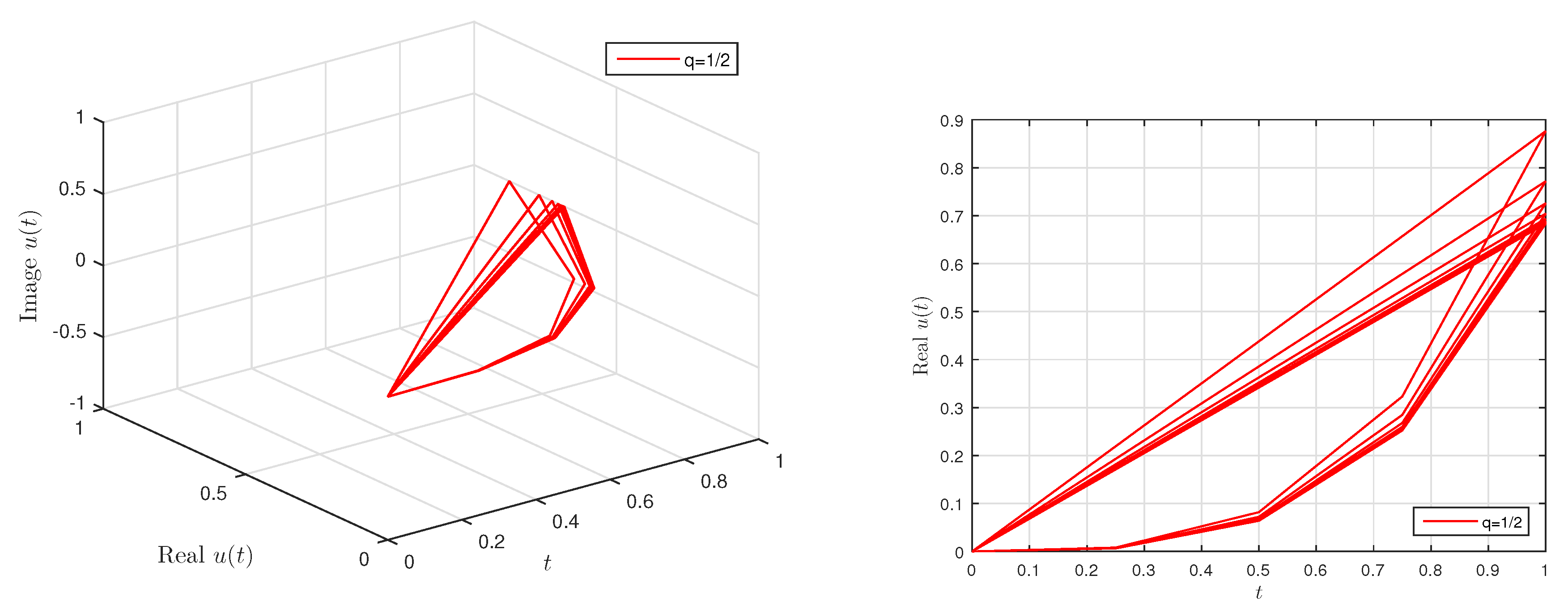
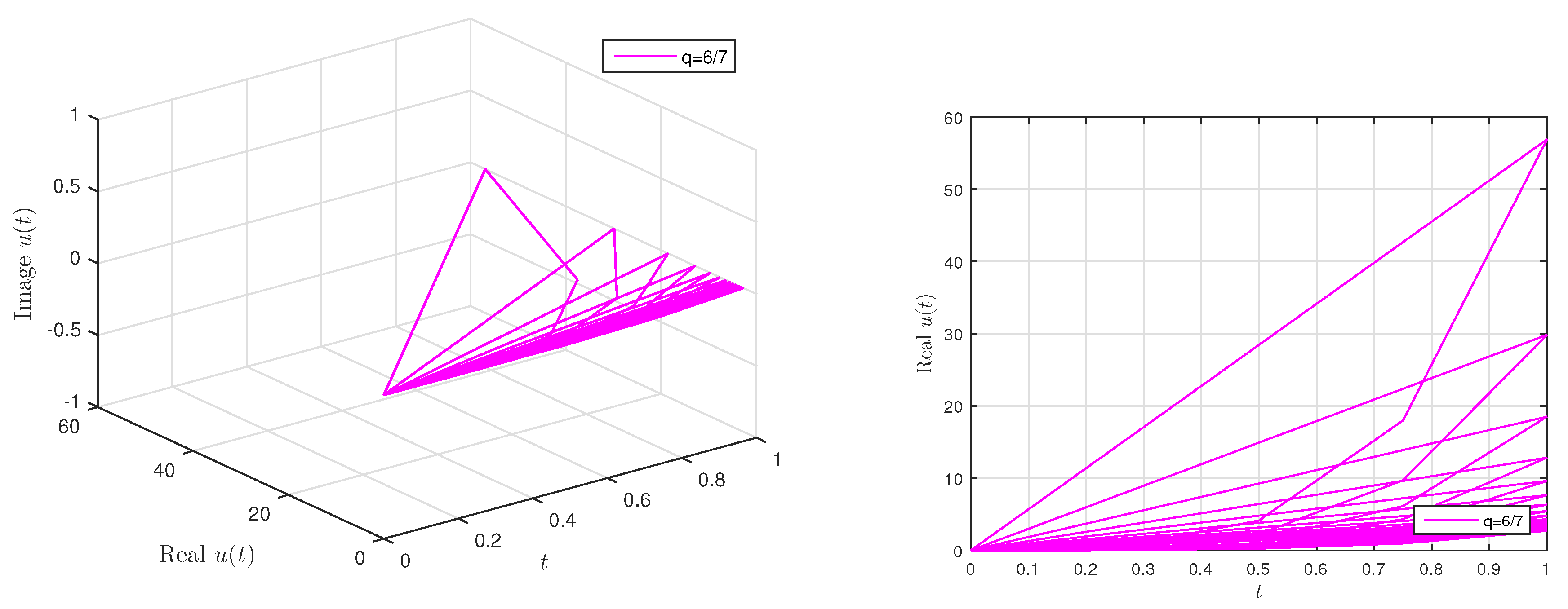
Example 1. Consider the SFqDEq with the B.C:for all and . Define the continuous map:such thatthat is, h is singular at . In addition to, Table 1 shows thatholds for each q. To numerically show our results, we consider the problem (2) as follows: Table 2 shows numerically the values of in Equation (5). In addition, the curve of w.r.t t in Figure 1, Figure 2 and Figure 3 for , , and , respectively (Algorithm A1). We can see that all conditions of Theorem 2 hold. Thus, the fixed point of Ω is a positive solution for problem (4). Linear motion is the most basic of all motion. According to Newton’s first law of motion, objects that do not experience any net force will continue to move in a straight line with a constant velocity until they are subjected to a net force. In the next example, we consider an application to examine the validity of our theoretical results on the fractional order representation of the motion of a particle along a straight line.
Example 2. We consider a constrained motion of a particle along a straight line restrained by two linear springs with equal spring constants (stiffness coefficient) under an external force and fractional damping along the t-axis (Figure 4). The springs, unless subjected to force, are assumed to have free length (unstretched length) and resist a change in length. The motion of the system along the t-axis is independent of the initial spring tension. The springs are anchored on the t-axis at and , and the vibration of the particle in this example is restricted to the t-axis only.
The vibration of the system is represented by a system of equations with the first equation having similar form of a simple harmonic oscillator, which cannot produce instability. Hence, the existence solution of the system depends on the following equation represented as the SFqDEq with the B.C:for all , . Here, θ and ν are constants, and L is the unstretched length of the spring. In Problem (1), Define the continuous map:for , such thatthat is, h is singular at . Consider particular values of the parameters m, . We consider particular values of the parameter . Therefore, all conditions of Theorem 2 hold. Thus, the SFqDEq (6) has a solution. 

 ,
, 





{kind=link}
{kind=link}
{kind=link}
{kind=link}
