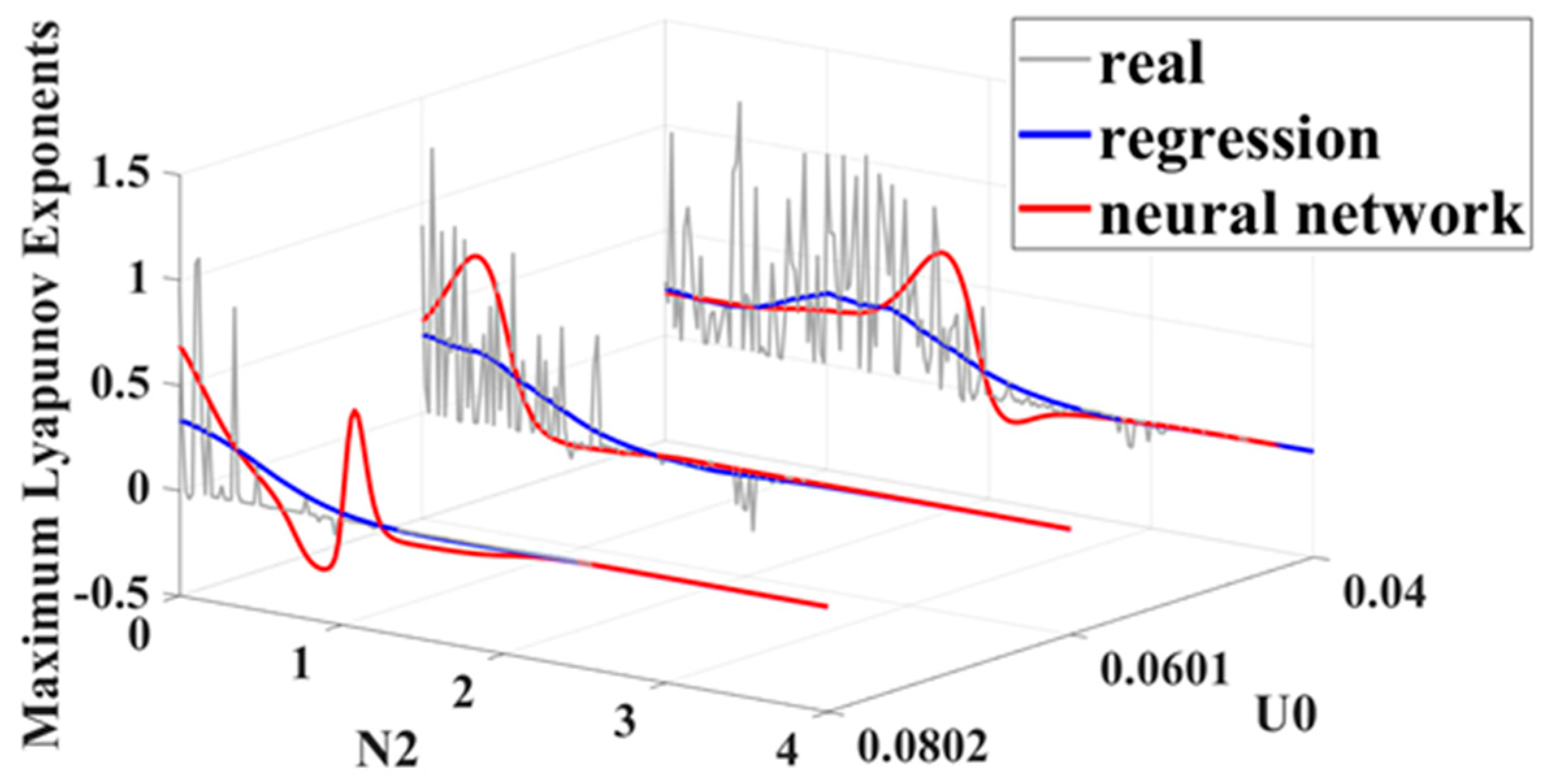
Figure 1.
Schematic diagram of the robotic arm system.
Figure 1.
Schematic diagram of the robotic arm system.
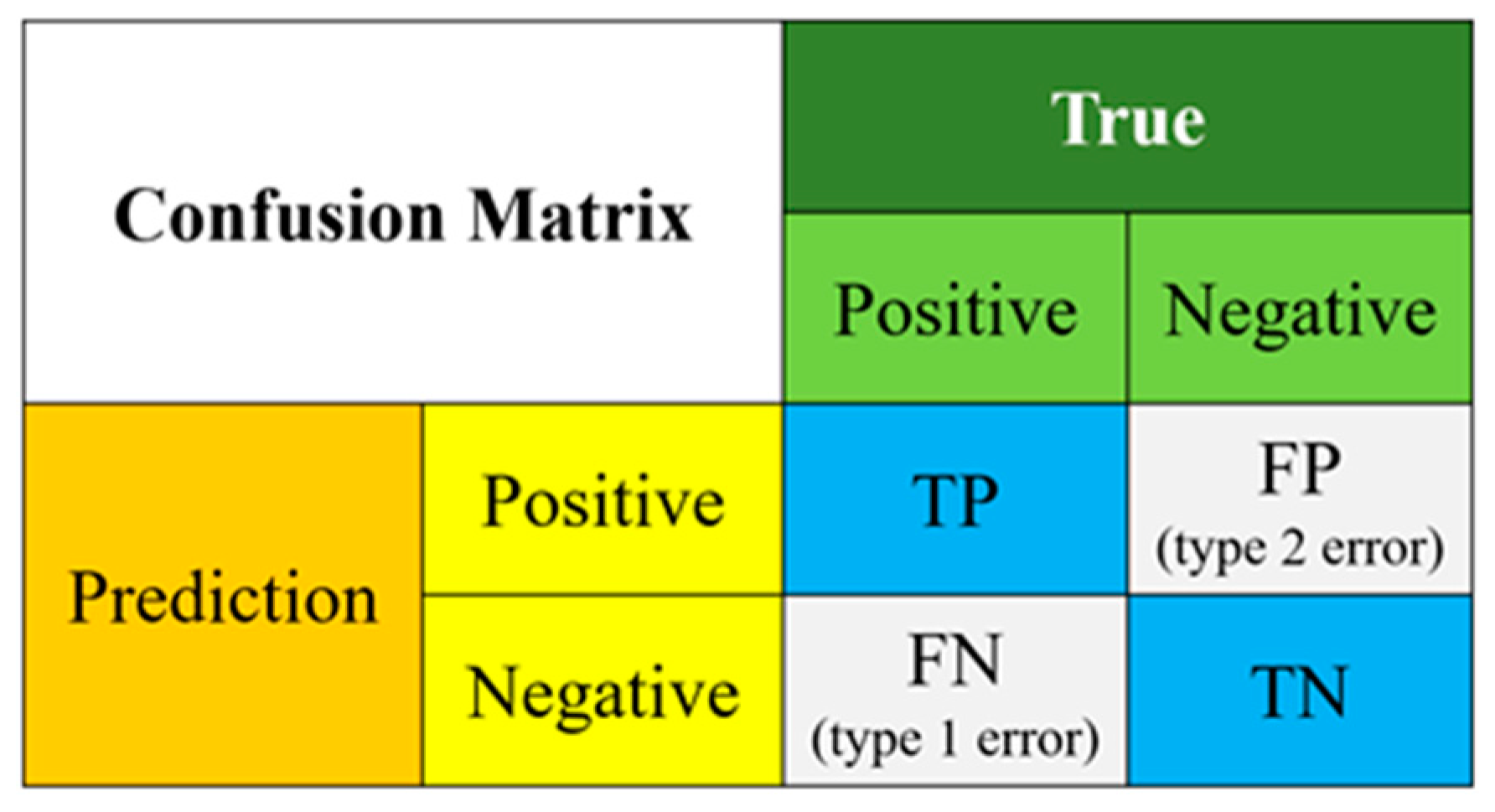
Figure 3.
Schematic diagram of confusion matrix.
Figure 3.
Schematic diagram of confusion matrix.
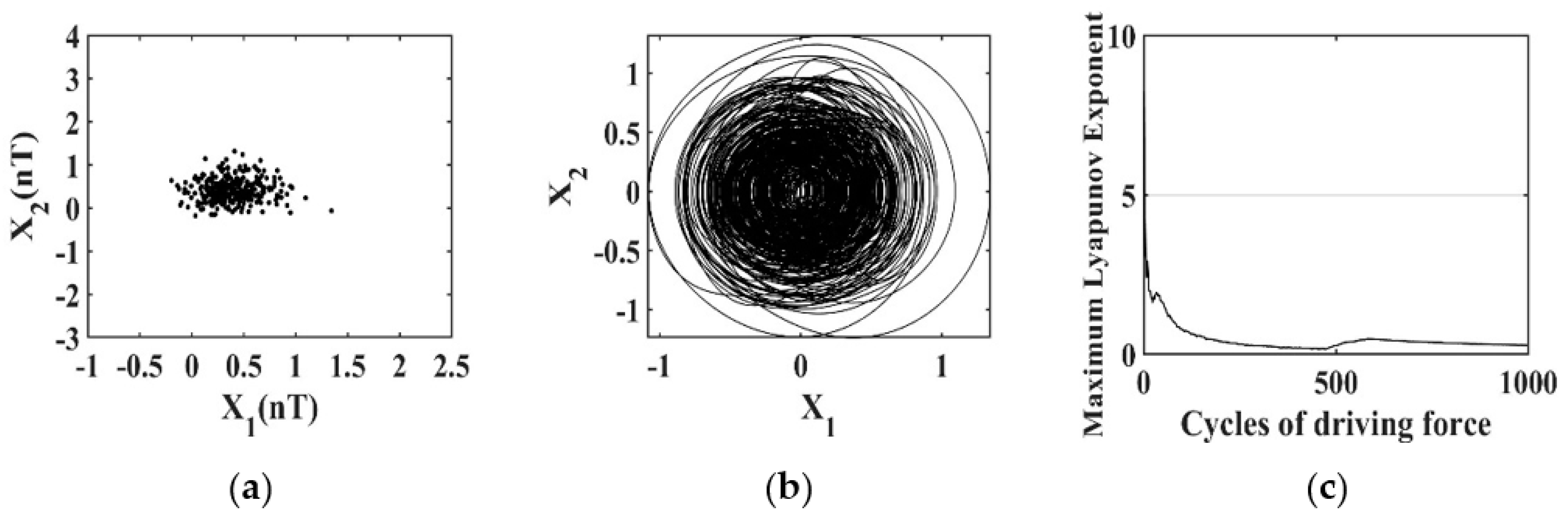
Figure 4.
Dynamic behavior for U0 = 0.04: (a) Poincaré map, (b) phase portrait, (c) maximum Lyapunov exponent.
Figure 4.
Dynamic behavior for U0 = 0.04: (a) Poincaré map, (b) phase portrait, (c) maximum Lyapunov exponent.
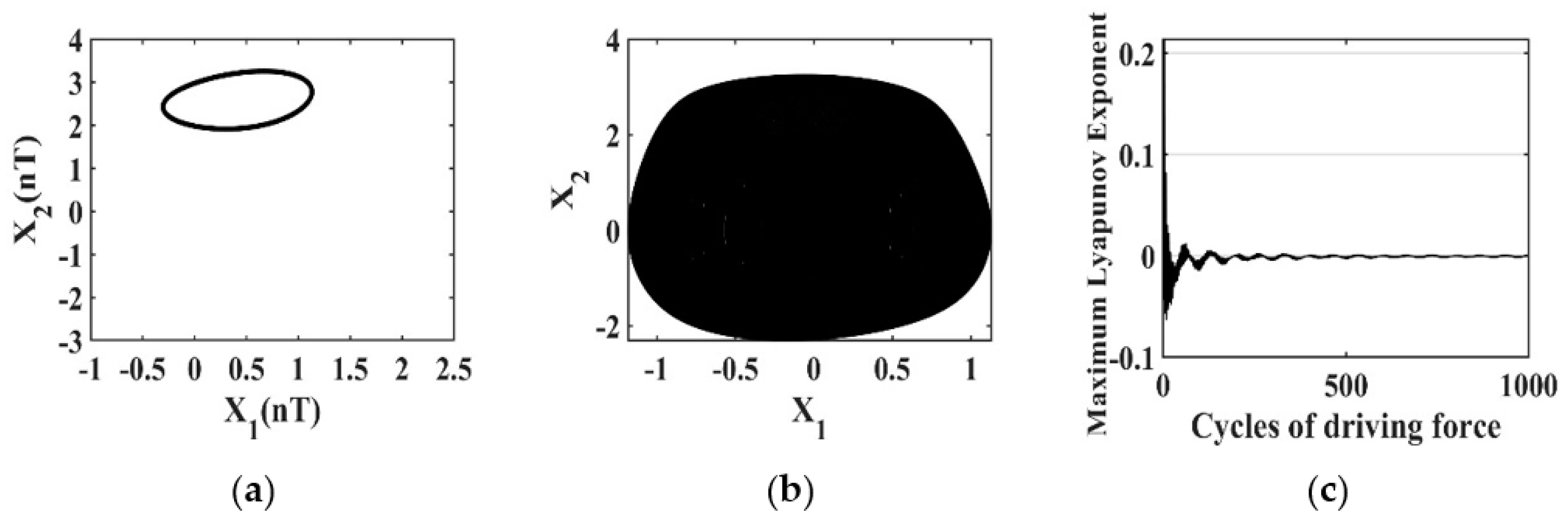
Figure 5.
Dynamic behavior for U0 = 0.0451: (a) Poincaré map, (b) phase portrait, (c) maximum Lyapunov exponent.
Figure 5.
Dynamic behavior for U0 = 0.0451: (a) Poincaré map, (b) phase portrait, (c) maximum Lyapunov exponent.
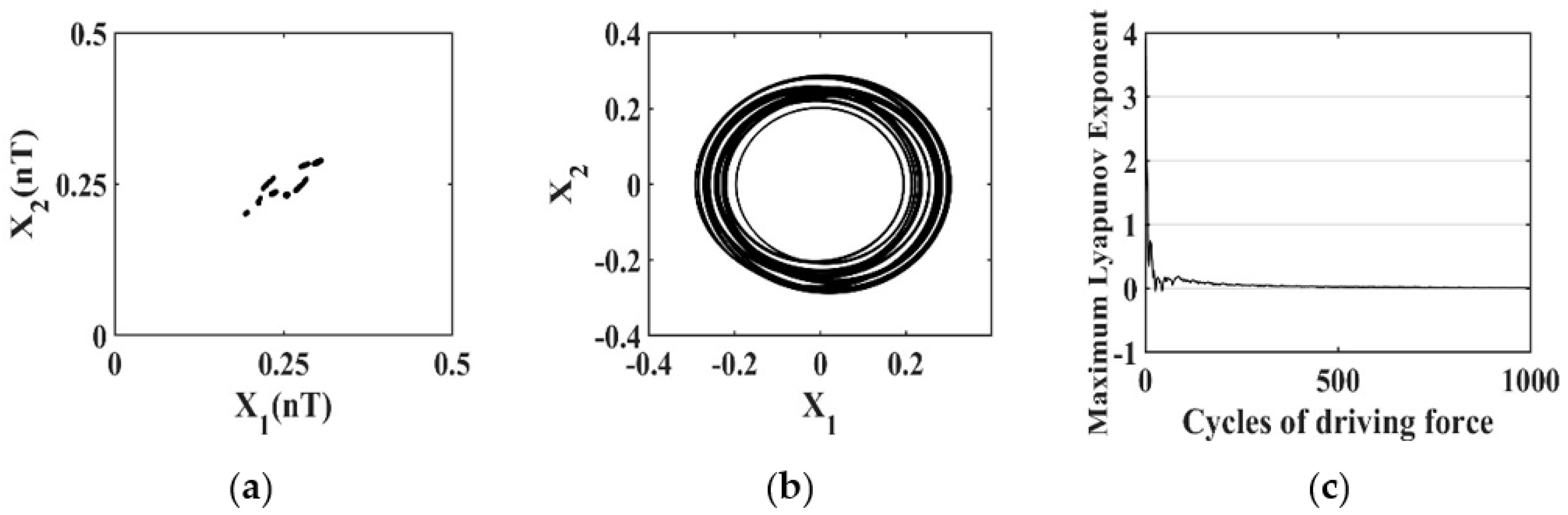
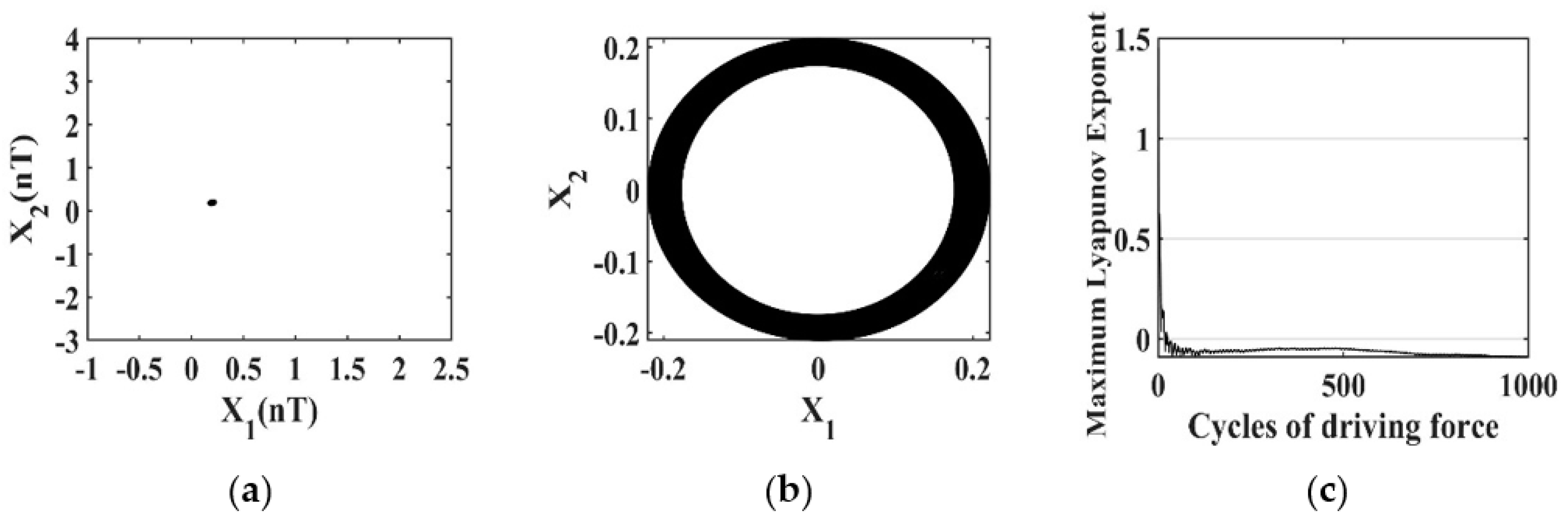
Figure 6.
Dynamic behavior for U0 = 0.0841: (a) Poincaré map, (b) phase portrait, (c) maximum Lyapunov exponent.
Figure 6.
Dynamic behavior for U0 = 0.0841: (a) Poincaré map, (b) phase portrait, (c) maximum Lyapunov exponent.
Figure 7.
Dynamic behavior for U0 = 0.0997: (a) Poincaré map, (b) phase portrai, (c) maximum Lyapunov exponent.
Figure 7.
Dynamic behavior for U0 = 0.0997: (a) Poincaré map, (b) phase portrai, (c) maximum Lyapunov exponent.
Figure 8.
Bifurcation diagram of (a) displacement and (b) velocity of the damping coefficient on the robotic arm system.
Figure 8.
Bifurcation diagram of (a) displacement and (b) velocity of the damping coefficient on the robotic arm system.
Figure 9.
The distribution of the maximum Lyapunov exponent with different damping coefficients.
Figure 9.
The distribution of the maximum Lyapunov exponent with different damping coefficients.
Figure 10.
Dynamic behavior for N2 = 0.24: (a) Poincaré map, (b) phase portrait, (c) maximum Lyapunov exponent.
Figure 10.
Dynamic behavior for N2 = 0.24: (a) Poincaré map, (b) phase portrait, (c) maximum Lyapunov exponent.
Figure 11.
Dynamic behavior for N2 = 0.42: (a) Poincaré map, (b) phase portrait, (c) maximum Lyapunov exponent.
Figure 11.
Dynamic behavior for N2 = 0.42: (a) Poincaré map, (b) phase portrait, (c) maximum Lyapunov exponent.
Figure 12.
Dynamic behavior for N2 = 1.38: (a) Poincaré map, (b) phase portrait, (c) maximum Lyapunov exponent.
Figure 12.
Dynamic behavior for N2 = 1.38: (a) Poincaré map, (b) phase portrait, (c) maximum Lyapunov exponent.
Figure 13.
Dynamic behavior for N2 = 2.44: (a) Poincaré map, (b) phase portrait, (c) maximum Lyapunov exponent.
Figure 13.
Dynamic behavior for N2 = 2.44: (a) Poincaré map, (b) phase portrait, (c) maximum Lyapunov exponent.
Figure 14.
Dynamic behavior for N2 = 2.84: (a) Poincaré map, (b) phase portrait, (c) maximum Lyapunov exponent.
Figure 14.
Dynamic behavior for N2 = 2.84: (a) Poincaré map, (b) phase portrait, (c) maximum Lyapunov exponent.
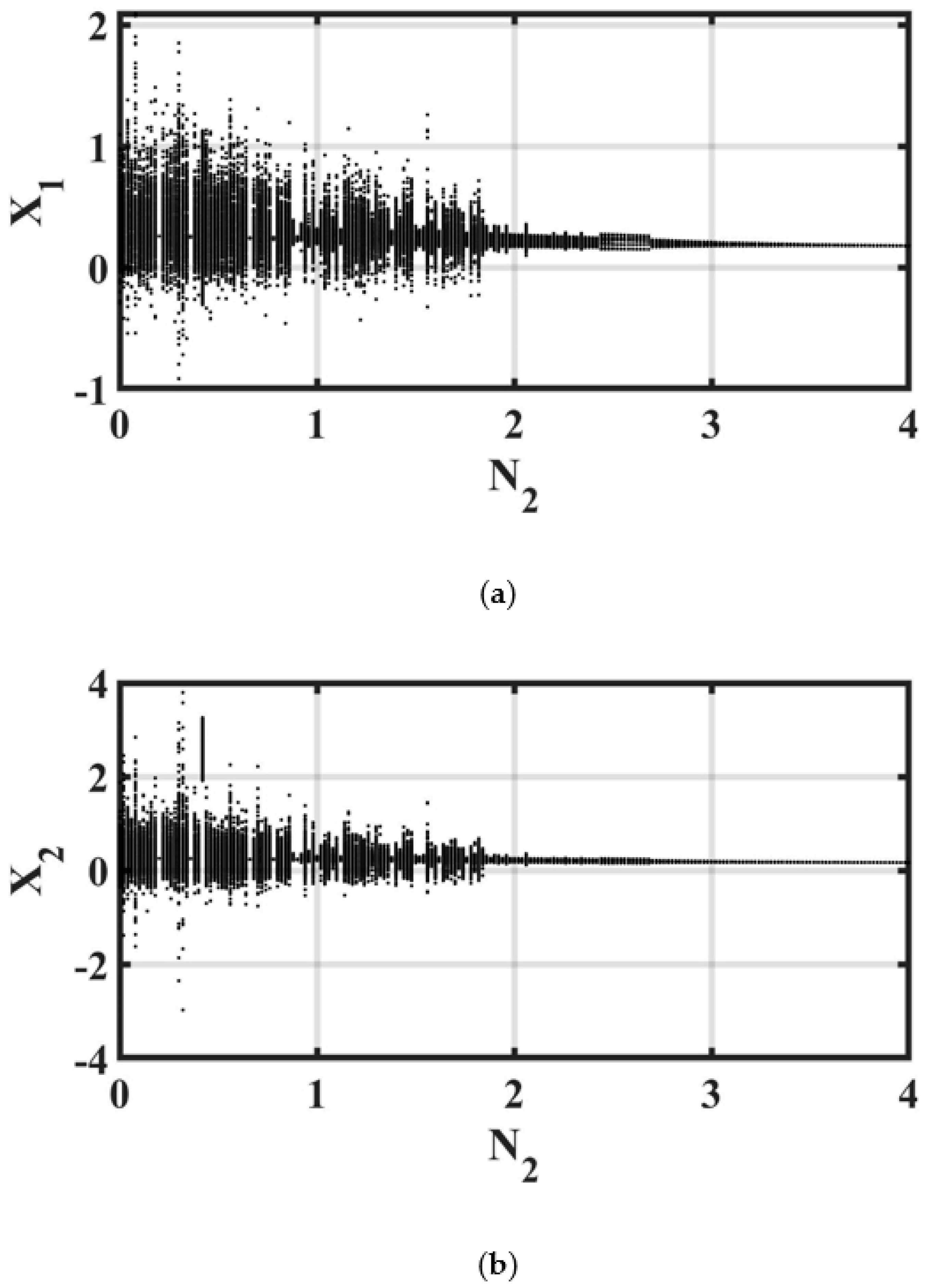
Figure 15.
Bifurcation diagram of (a) displacement and (b) velocity of the stiffness coefficient on the robotic arm system.
Figure 15.
Bifurcation diagram of (a) displacement and (b) velocity of the stiffness coefficient on the robotic arm system.
Figure 16.
The distribution of the maximum Lyapunov exponent with different stiffness coefficient.
Figure 16.
The distribution of the maximum Lyapunov exponent with different stiffness coefficient.
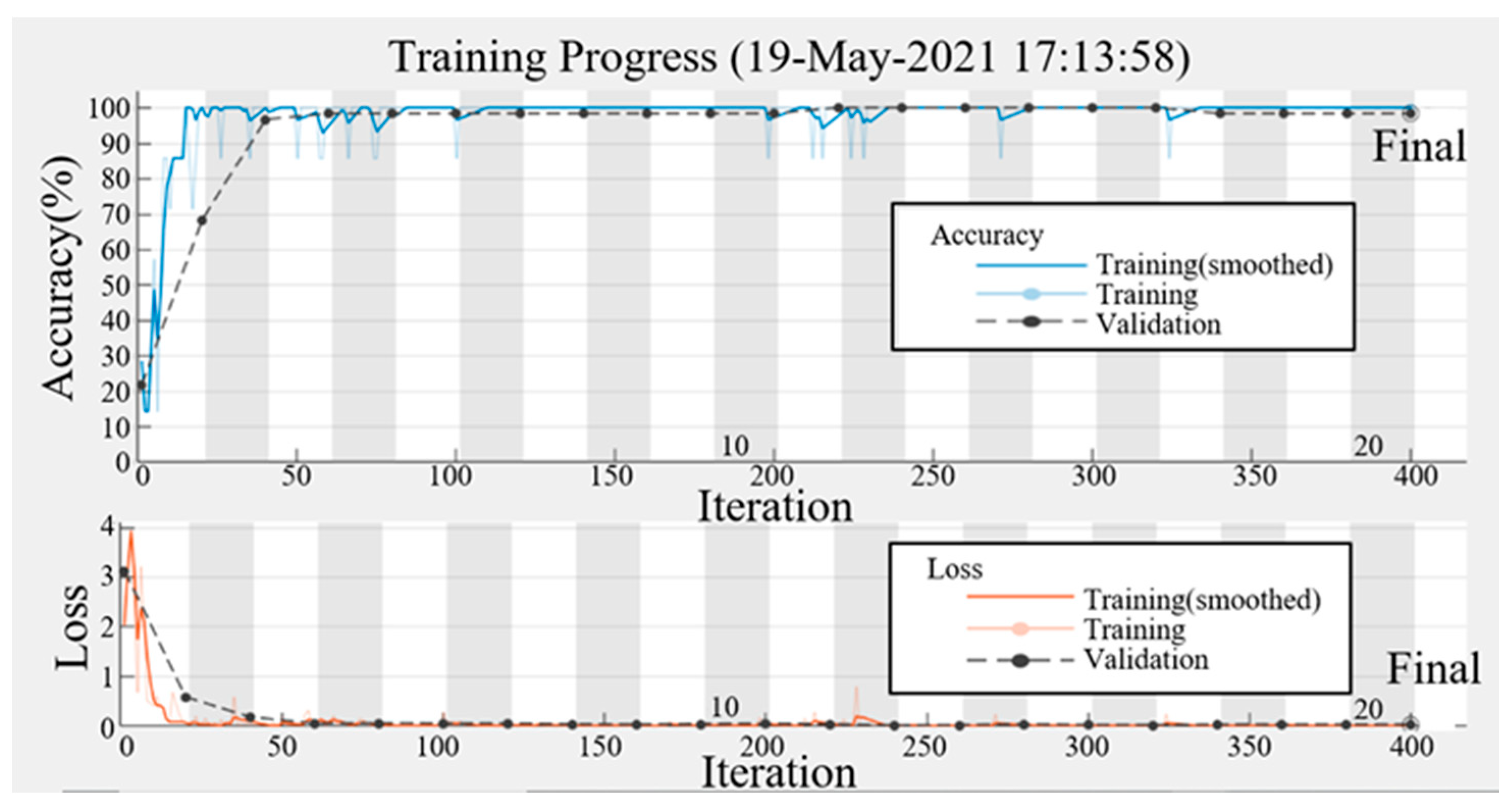
Figure 17.
Analysis of the training accuracy and loss status of the phase portrait using GoogLeNet.
Figure 17.
Analysis of the training accuracy and loss status of the phase portrait using GoogLeNet.
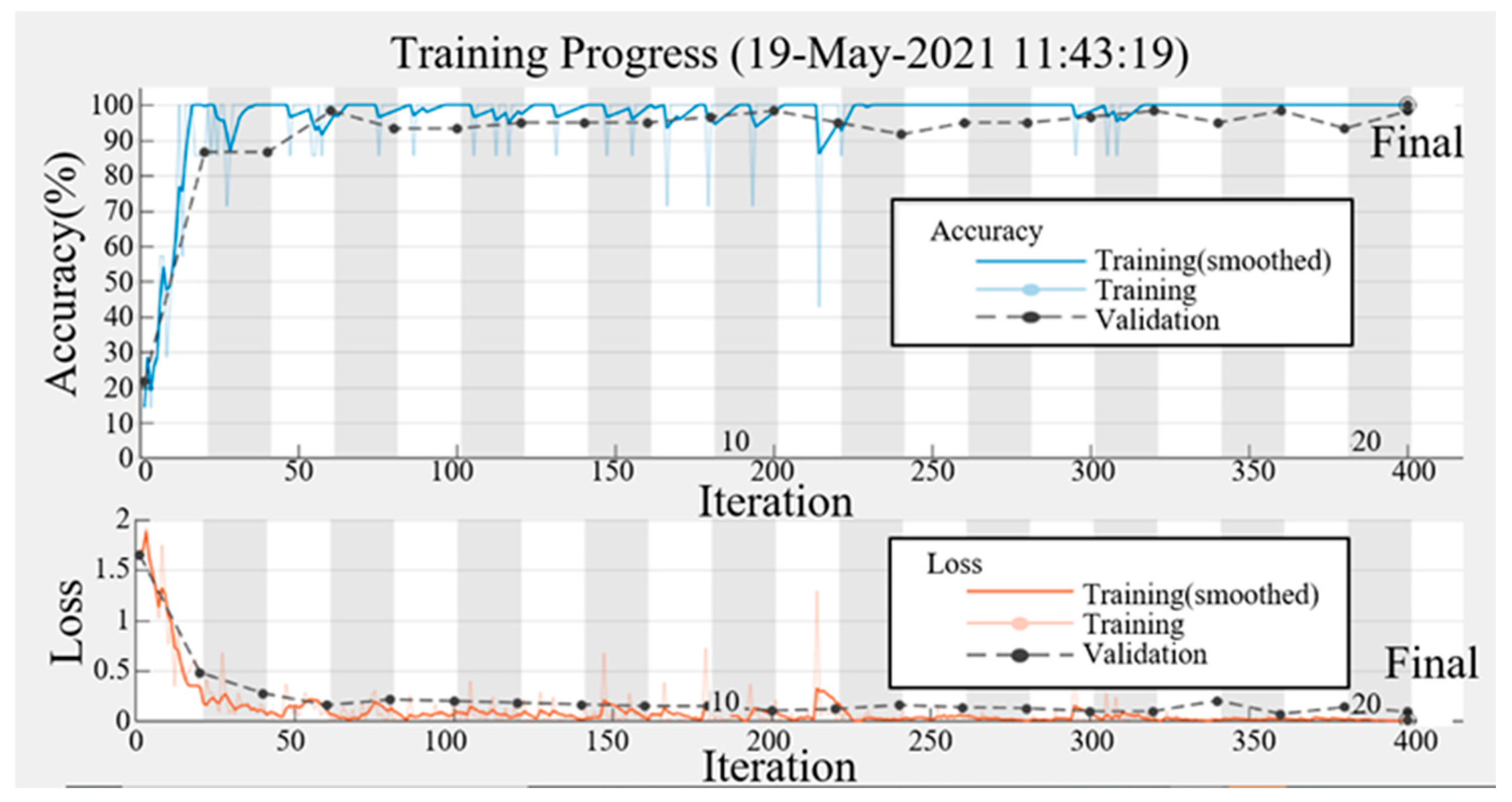
Figure 18.
Analysis of the training accuracy and loss status of the phase portrait using ResNet-50.
Figure 18.
Analysis of the training accuracy and loss status of the phase portrait using ResNet-50.
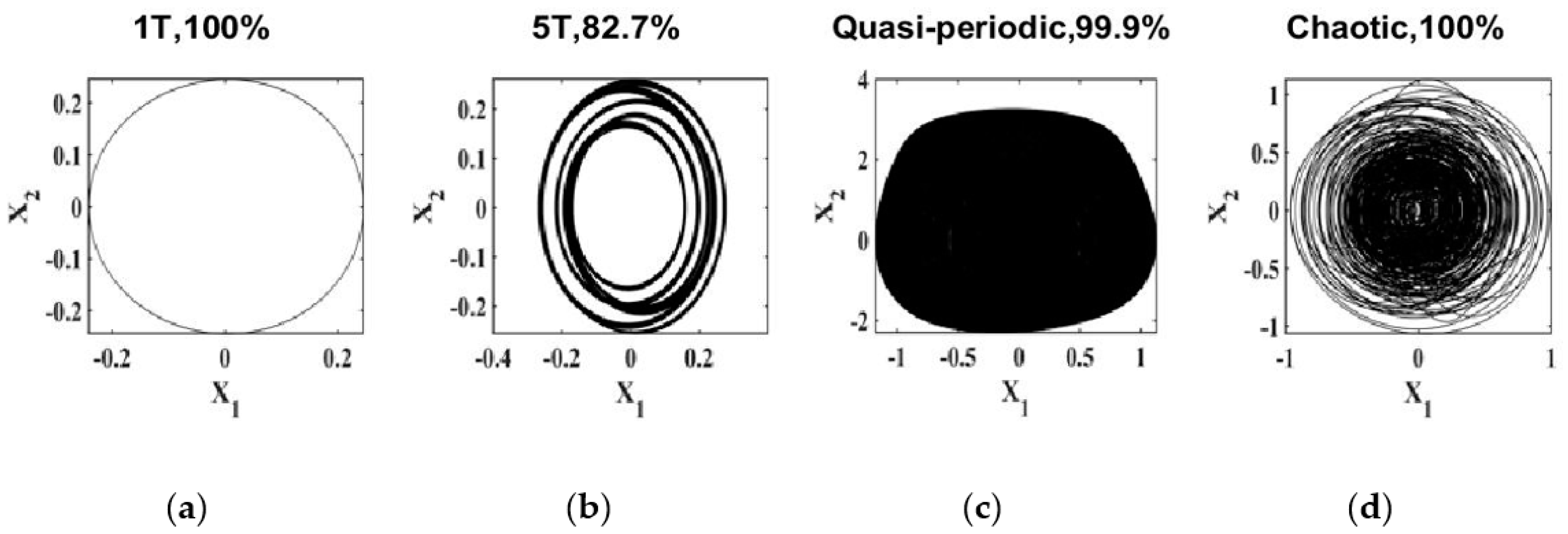
Figure 19.
The identification of the phase portrait by GoogLeNet: (a) 1T, (b) 5T, (c) Quasi-periodic, (d) Chaotic.
Figure 19.
The identification of the phase portrait by GoogLeNet: (a) 1T, (b) 5T, (c) Quasi-periodic, (d) Chaotic.
Figure 20.
The identification of the phase portrait by ResNet-50: (a) 1T, (b) 5T, (c) Quasi-periodic, (d) Chaotic.
Figure 20.
The identification of the phase portrait by ResNet-50: (a) 1T, (b) 5T, (c) Quasi-periodic, (d) Chaotic.
Figure 21.
Confusion matrix for phase image identification using (a) GoogLeNet and (b) ResNet-50.
Figure 21.
Confusion matrix for phase image identification using (a) GoogLeNet and (b) ResNet-50.
Figure 22.
Analysis of the training accuracy and loss status of Poincaré map using GoogLeNet.
Figure 22.
Analysis of the training accuracy and loss status of Poincaré map using GoogLeNet.
Figure 23.
Analysis of the training accuracy and loss status of Poincaré map using ResNet-50.
Figure 23.
Analysis of the training accuracy and loss status of Poincaré map using ResNet-50.
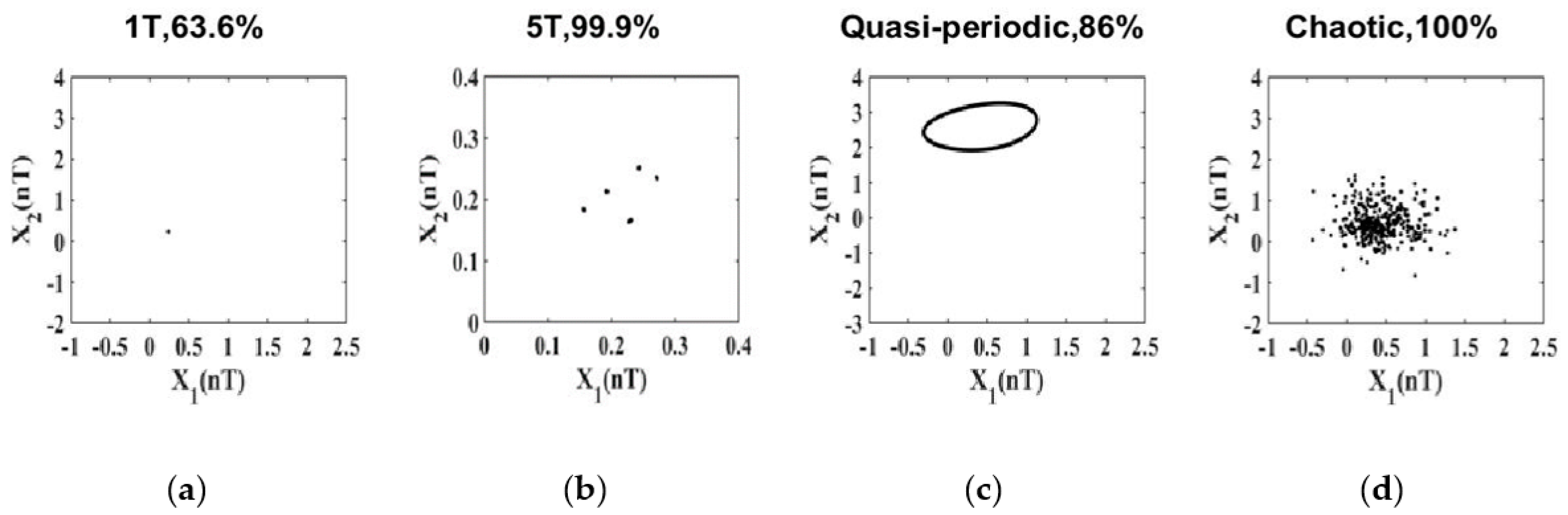
Figure 24.
Recognition of the Poincaré map using GoogLeNet: (a) 1T, (b) 5T, (c) Quasi-periodic, (d) Chaotic.
Figure 24.
Recognition of the Poincaré map using GoogLeNet: (a) 1T, (b) 5T, (c) Quasi-periodic, (d) Chaotic.
Figure 25.
Recognition of the Poincaré map using ResNet-50: (a) 1T, (b) 5T, (c) Quasi-periodic, (d) Chaotic.
Figure 25.
Recognition of the Poincaré map using ResNet-50: (a) 1T, (b) 5T, (c) Quasi-periodic, (d) Chaotic.
Figure 26.
Confusion matrix for Poincaré map identification using (a) GoogLeNet and (b) ResNet-50.
Figure 26.
Confusion matrix for Poincaré map identification using (a) GoogLeNet and (b) ResNet-50.
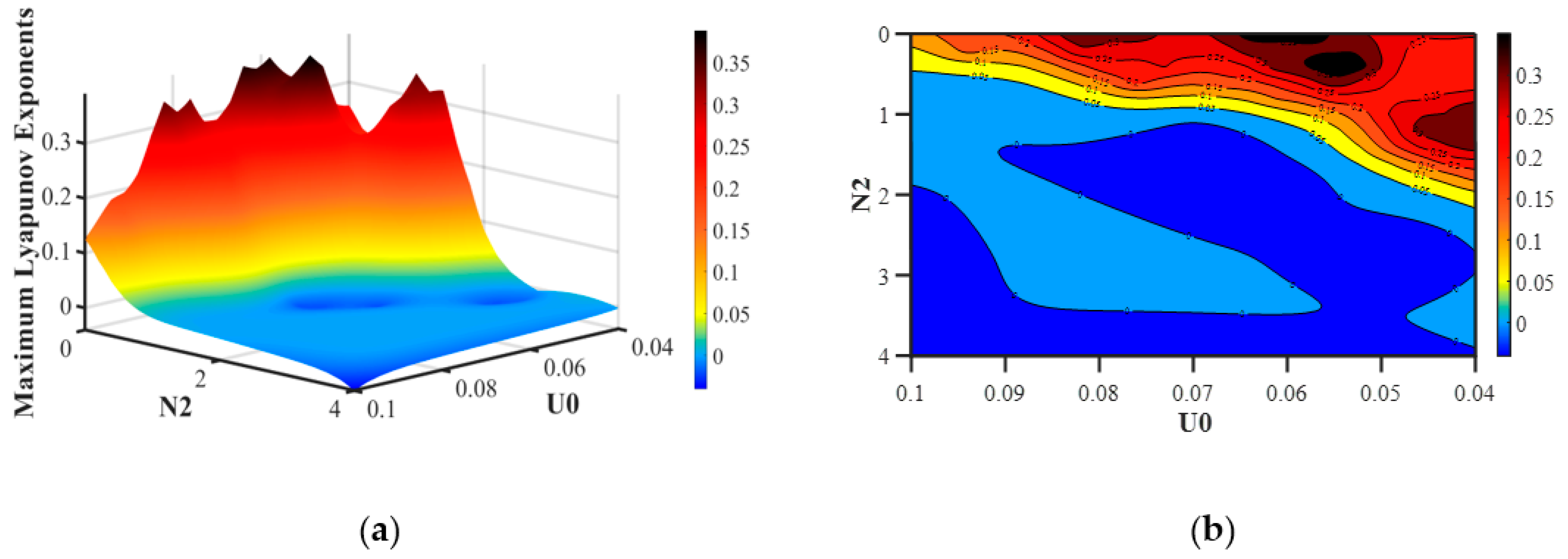
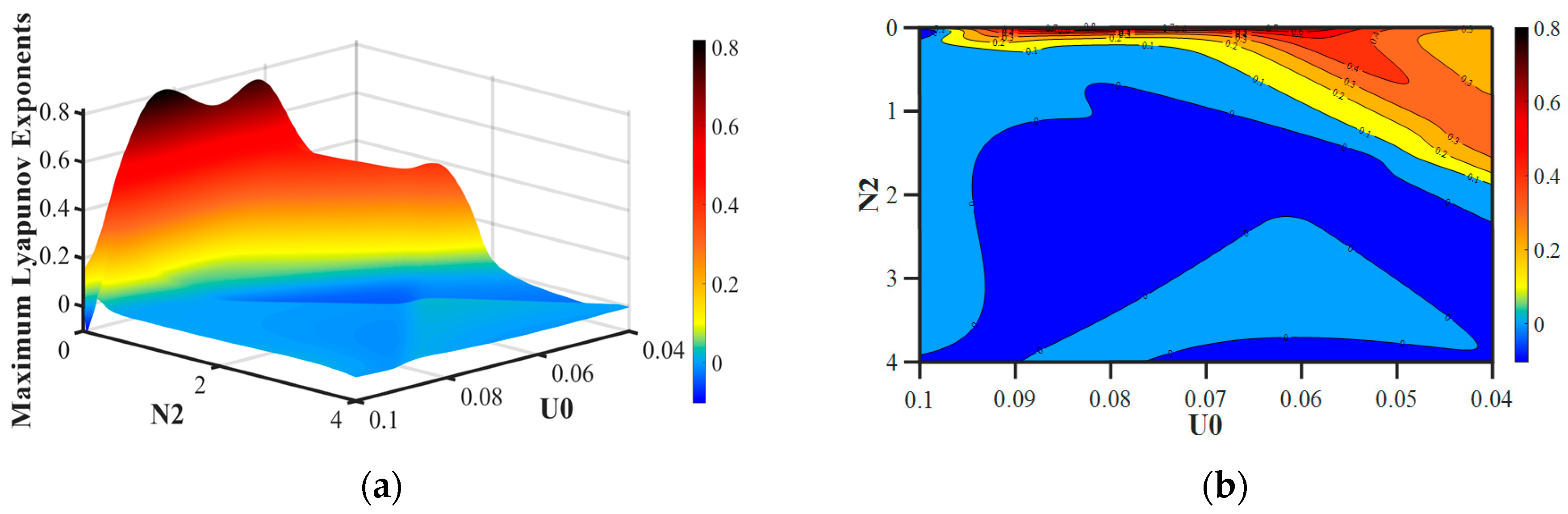
Figure 27.
The original data distribution of the maximum Lyapunov exponent: (a) 3-Dimensional map, (b) contour map.
Figure 27.
The original data distribution of the maximum Lyapunov exponent: (a) 3-Dimensional map, (b) contour map.
Figure 28.
Gaussian process regression prediction results (data 21 × 21): (a) 3-Dimensional map, (b) contour map.
Figure 28.
Gaussian process regression prediction results (data 21 × 21): (a) 3-Dimensional map, (b) contour map.
Figure 29.
Gaussian process regression prediction results (data 51 × 51): (a) 3-Dimensional map, (b) contour map.
Figure 29.
Gaussian process regression prediction results (data 51 × 51): (a) 3-Dimensional map, (b) contour map.
Figure 30.
Gaussian process regression prediction results (data 101 × 101): (a) 3-Dimensional map, (b) contour map.
Figure 30.
Gaussian process regression prediction results (data 101 × 101): (a) 3-Dimensional map, (b) contour map.
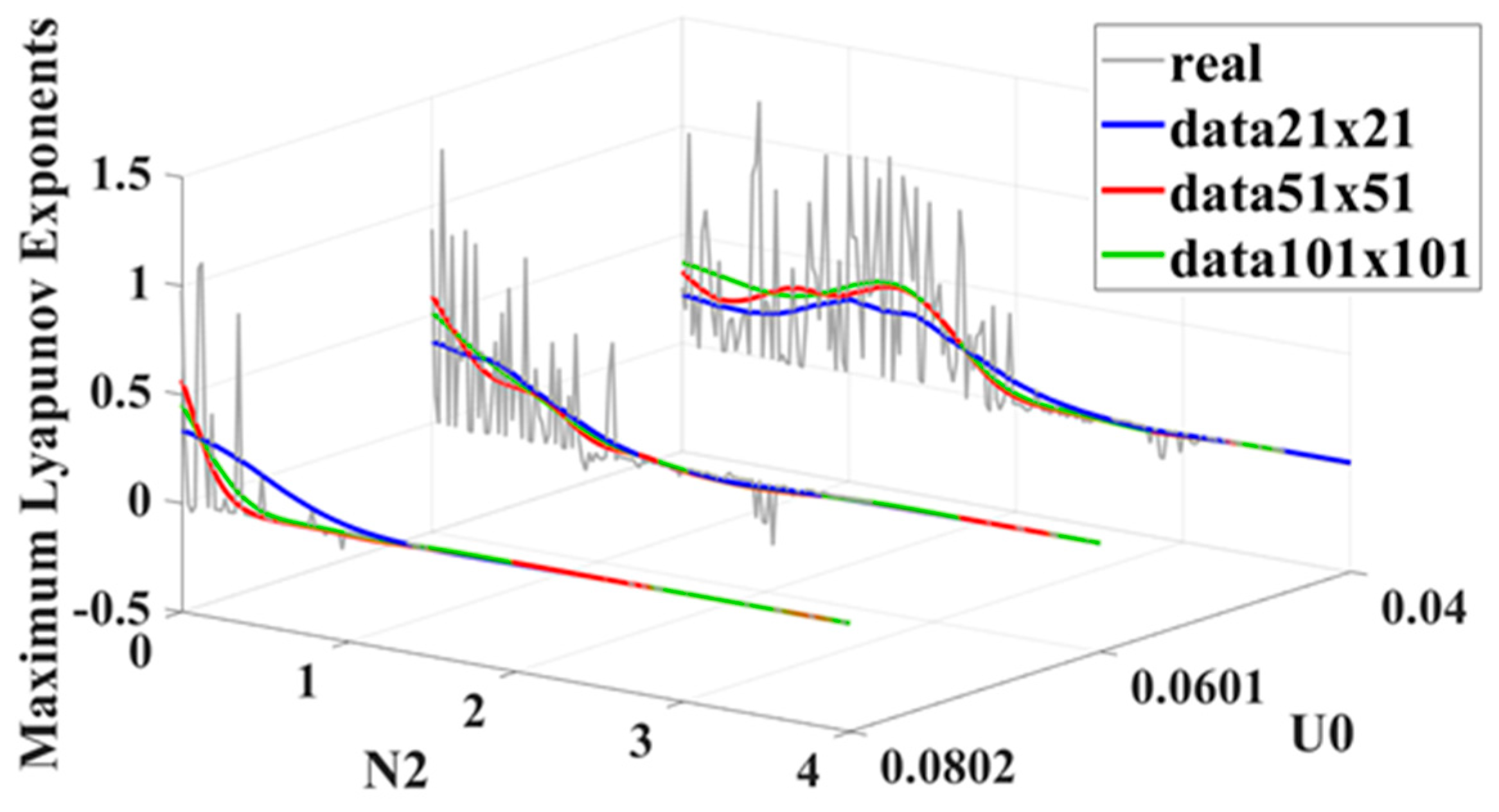
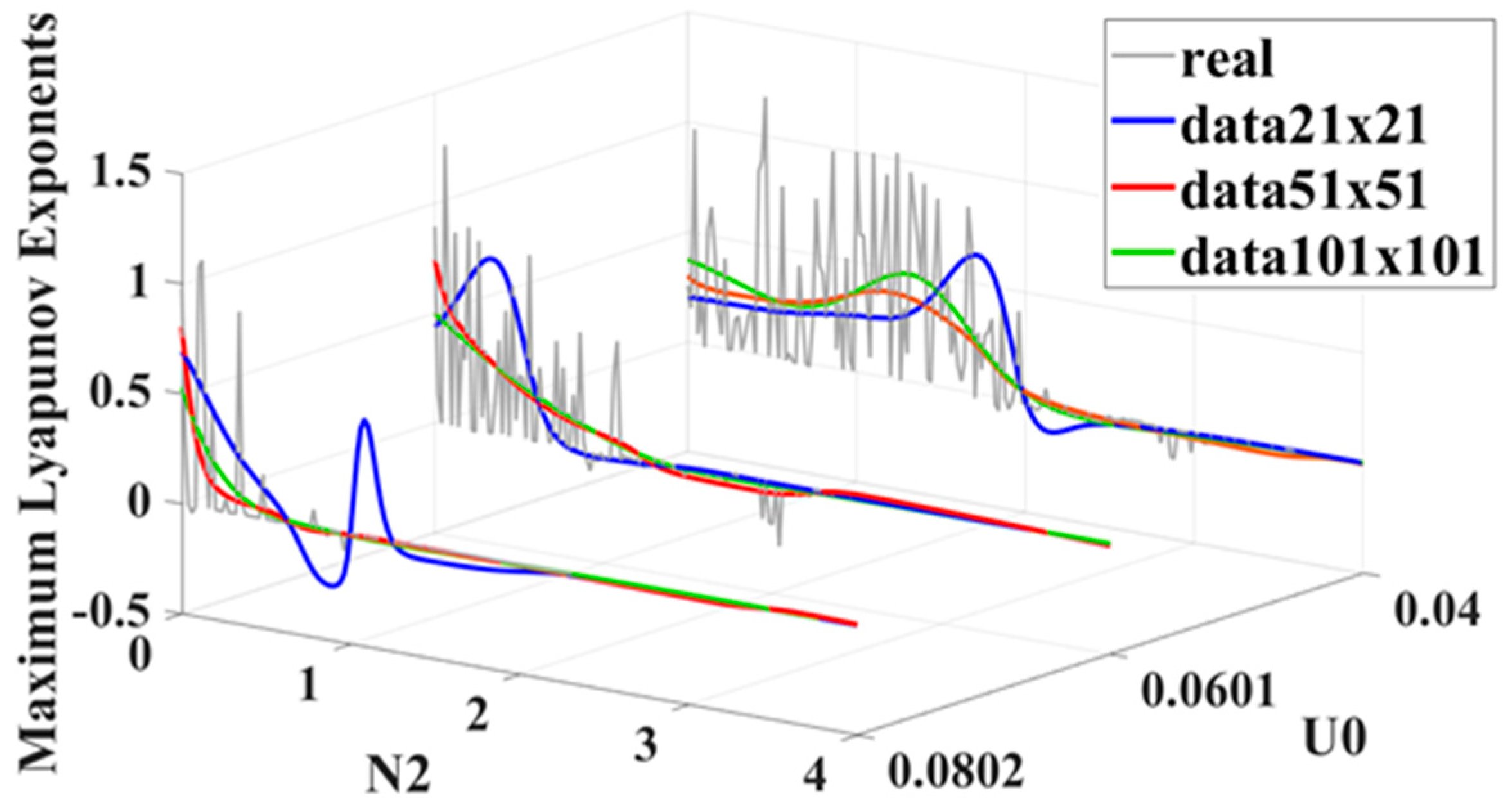
Figure 31.
Forecast comparison of Gaussian regression process.
Figure 31.
Forecast comparison of Gaussian regression process.
Figure 32.
Backward propagation neural network prediction results (data 21 × 21): (a) 3-Dimensional map, (b) contour map.
Figure 32.
Backward propagation neural network prediction results (data 21 × 21): (a) 3-Dimensional map, (b) contour map.
Figure 33.
Backward propagation neural network prediction results (data 51 × 51): (a) 3-Dimensional map, (b) contour map.
Figure 33.
Backward propagation neural network prediction results (data 51 × 51): (a) 3-Dimensional map, (b) contour map.
Figure 34.
Backward propagation neural network prediction results (data 101 × 101): (a) 3-Dimensional map, (b) contour map.
Figure 34.
Backward propagation neural network prediction results (data 101 × 101): (a) 3-Dimensional map, (b) contour map.
Figure 35.
Forecast comparison of backward propagation neural network.
Figure 35.
Forecast comparison of backward propagation neural network.
Figure 36.
Comparison of prediction results between GPR and BPNN (data 21 × 21).
Figure 36.
Comparison of prediction results between GPR and BPNN (data 21 × 21).
Figure 37.
Comparison of prediction results between GPR and BPNN (data 51 × 51).
Figure 37.
Comparison of prediction results between GPR and BPNN (data 51 × 51).
Figure 38.
Comparison of prediction results between GPR and BPNN (data 101 × 101).
Figure 38.
Comparison of prediction results between GPR and BPNN (data 101 × 101).
Table 1.
Dimensionless parameter conversion formulas.
Table 1.
Dimensionless parameter conversion formulas.
| | | |
| | | |
| | | |
| | | |
| | | |
Table 2.
Dynamic behavior for U0 = 0.04–0.10.
Table 2.
Dynamic behavior for U0 = 0.04–0.10.
| (0.04, 0.0412) | (0.0412, 0.0415) | (0.0415, 0.0448) | (0.0448, 0.0451) |
| Dynamic behavior | chaos | T | chaos | T |
| (0.0451, 0.0457) | (0.0457, 0.0463) | (0.0463, 0.0490) | (0.0490, 0.0493) |
| Dynamic behavior | chaos | T | chaos | T |
| (0.0493, 0.0547) | (0.0547, 0.0550) | (0.0550, 0.0580) | (0.0580, 0.0583) |
| Dynamic behavior | chaos | T | chaos | T |
| (0.0583, 0.0610) | (0.0610, 0.0613) | (0.0613, 0.1] |
| Dynamic behavior | chaos | T | Chaos and T appear interactively |
Table 3.
Dynamic behavior of N2 = 0~4.0.
Table 3.
Dynamic behavior of N2 = 0~4.0.
| (0.00, 0.20) | (0.20, 0.22) | (0.22, 0.36) | (0.36, 0.38) | (0.38, 0.42) |
| Dynamic behavior | chaos | T | chaos | T | chaos |
| (0.42, 0.44) | (0.44, 0.66) | (0.66, 0.68) | (0.68, 0.78) | (0.78, 0.80) |
| Dynamic behavior | quasi-period | chaos | T | chaos | T |
| (0.80, 0.90) | (0.90, 0.92) | (0.92, 1.38) | (1.38, 1.40) | (1.40, 2.00) |
| Dynamic behavior | chaos | T | chaos | multi-period | chaos |
| (2.00, 2.06) | (2.06, 2.08) | (2.08, 2.38) | (2.38, 2.42) | (2.42, 2.44) |
| Dynamic behavior | quasi-period | chaos | quasi-period | multi-period | quasi-period |
| (2.44, 2.70) | (2.70, 2.84) | (2.84, 4.00) | |
| Dynamic behavior | 5T | quasi-period | T |
Table 4.
Phase portrait Training Results.
Table 4.
Phase portrait Training Results.
| Item | Details | GoogLeNet | ResNet-50 |
|---|
| Results | Validation accuracy | 98.33% | 100% |
| Training Time | Elapsed time | 40 min 11 s | 69 min 41 s |
| Training Cycle | Epoch | 20 of 20 |
| Iteration | 400 of 400 |
| Iterations per epoch | 20 |
| Maximum iterations | 400 |
| Validation | Frequency | 20 iterations |
| Other Information | Hardware resource | Single CPU |
| Learning rate | 0.0001 |
Table 5.
Comparison of various performance indicators of phase portrait identification with GoogLeNet and ResNet-50.
Table 5.
Comparison of various performance indicators of phase portrait identification with GoogLeNet and ResNet-50.
| Type | Indicator | GoogLeNet | ResNet-50 |
|---|
| 1T | Precision | 1 | 1 |
| Sensitivity | 0.98 | 1 |
| Specificity | 1.007 | 1 |
| F1-Score | 0.99 | 1 |
| 5T | Precision | 1 | 1 |
| Sensitivity | 1 | 1 |
| Specificity | 1 | 1 |
| F1-Score | 1 | 1 |
| Quasi-periodic | Precision | 0.98 | 1 |
| Sensitivity | 1 | 1 |
| Specificity | 0.993 | 1 |
| F1-Score | 0.99 | 1 |
| Chaotic | Precision | 1 | 1 |
| Sensitivity | 1 | 1 |
| Specificity | 1 | 1 |
| F1-Score | 1 | 1 |
| Accuracy | 0.995 | 1 |
Table 6.
Training Results of Poincaré map.
Table 6.
Training Results of Poincaré map.
| Item | Details | GoogLeNet | ResNet-50 |
|---|
| Results | Validation accuracy | 98.33% | 95.00% |
| Training Time | Elapsed time | 18 min 34 s | 86 min 19 s |
| Training Cycle | Epoch | 20 of 20 |
| Iteration | 400 of 400 |
| Iterations per epoch | 20 |
| Maximum iterations | 400 |
| Validation | Frequency | 20 iterations |
| Other Information | Hardware resource | Single CPU |
| Learning rate | 0.0001 |
Table 7.
Comparison of various performance indicators of Poincaré map identification with GoogLeNet and ResNet-50.
Table 7.
Comparison of various performance indicators of Poincaré map identification with GoogLeNet and ResNet-50.
| Type | Indicator | GoogLeNet | ResNet-50 |
|---|
| 1T | Precision | 0.993 | 1 |
| Sensitivity | 0.94 | 1 |
| Specificity | 1.018 | 1 |
| F1-Score | 0.966 | 1 |
| 5T | Precision | 0.942 | 1 |
| Sensitivity | 0.98 | 0.967 |
| Specificity | 0.987 | 1.011 |
| F1-Score | 0.961 | 0.983 |
| Quasi-periodic | Precision | 1 | 0.974 |
| Sensitivity | 0.967 | 0.987 |
| Specificity | 1.011 | 0.996 |
| F1-Score | 0.983 | 0.98 |
| Chaotic | Precision | 0.955 | 0.98 |
| Sensitivity | 1 | 1 |
| Specificity | 0.984 | 0.993 |
| F1-Score | 0.977 | 0.99 |
| Accuracy | 0.972 | 0.988 |
Table 8.
A comparison of GPR and BPNN training.
Table 8.
A comparison of GPR and BPNN training.
| Method | Data | RMSE | R2 | MSE | MAE |
|---|
| GPR | 21 × 21 | 0.1669 | 0.34 | 0.0279 | 0.0852 |
| 51 × 51 | 0.1454 | 0.45 | 0.0211 | 0.0610 |
| 101 × 101 | 0.1584 | 0.37 | 0.0251 | 0.0655 |
| BPNN | 21 × 21 | 0.1769 | 0.28 | 0.0313 | 0.0846 |
| 51 × 51 | 0.1532 | 0.41 | 0.0235 | 0.0729 |
| 101 × 101 | 0.1587 | 0.38 | 0.0252 | 0.0655 |
Table 9.
Comparison of prediction errors between GPR and BPNN with the original dataset 201 × 201.
Table 9.
Comparison of prediction errors between GPR and BPNN with the original dataset 201 × 201.
| Method | Data | RMSE | R2 | MSE | MAE |
|---|
| GPR | 21 × 21 | 0.1644 | 0.32 | 0.0270 | 0.0714 |
| 51 × 51 | 0.1619 | 0.34 | 0.0262 | 0.0642 |
| 101 × 101 | 0.1603 | 0.35 | 0.0257 | 0.0649 |
| BPNN | 21 × 21 | 0.1978 | 0.01 | 0.0391 | 0.0859 |
| 51 × 51 | 0.1644 | 0.32 | 0.0270 | 0.0684 |
| 101 × 101 | 0.1605 | 0.35 | 0.0257 | 0.0657 |











































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}