
Indirect Approach to Identify Girder Bridge Element Stiffness Based on Blind Source Separation

Abstract
:1. Introduction
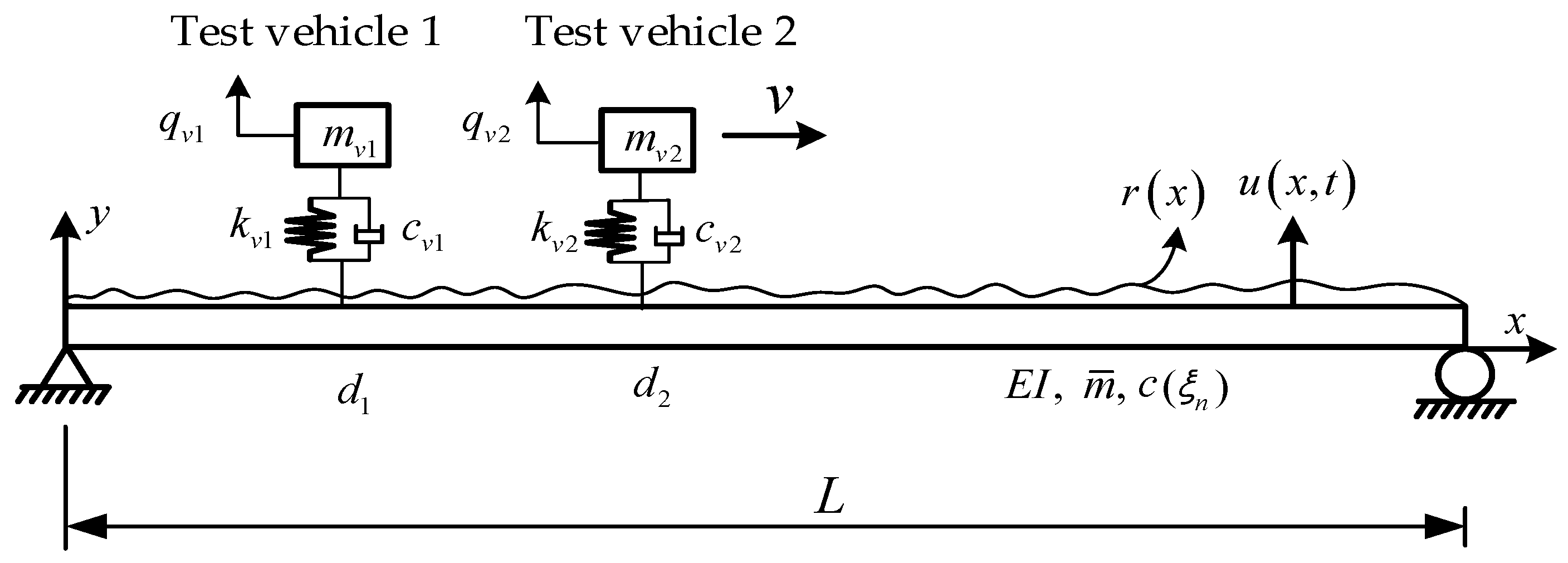
2. Theory of Vehicle–Bridge Interaction
3. Methodology of Blind Source Separation
- (1)
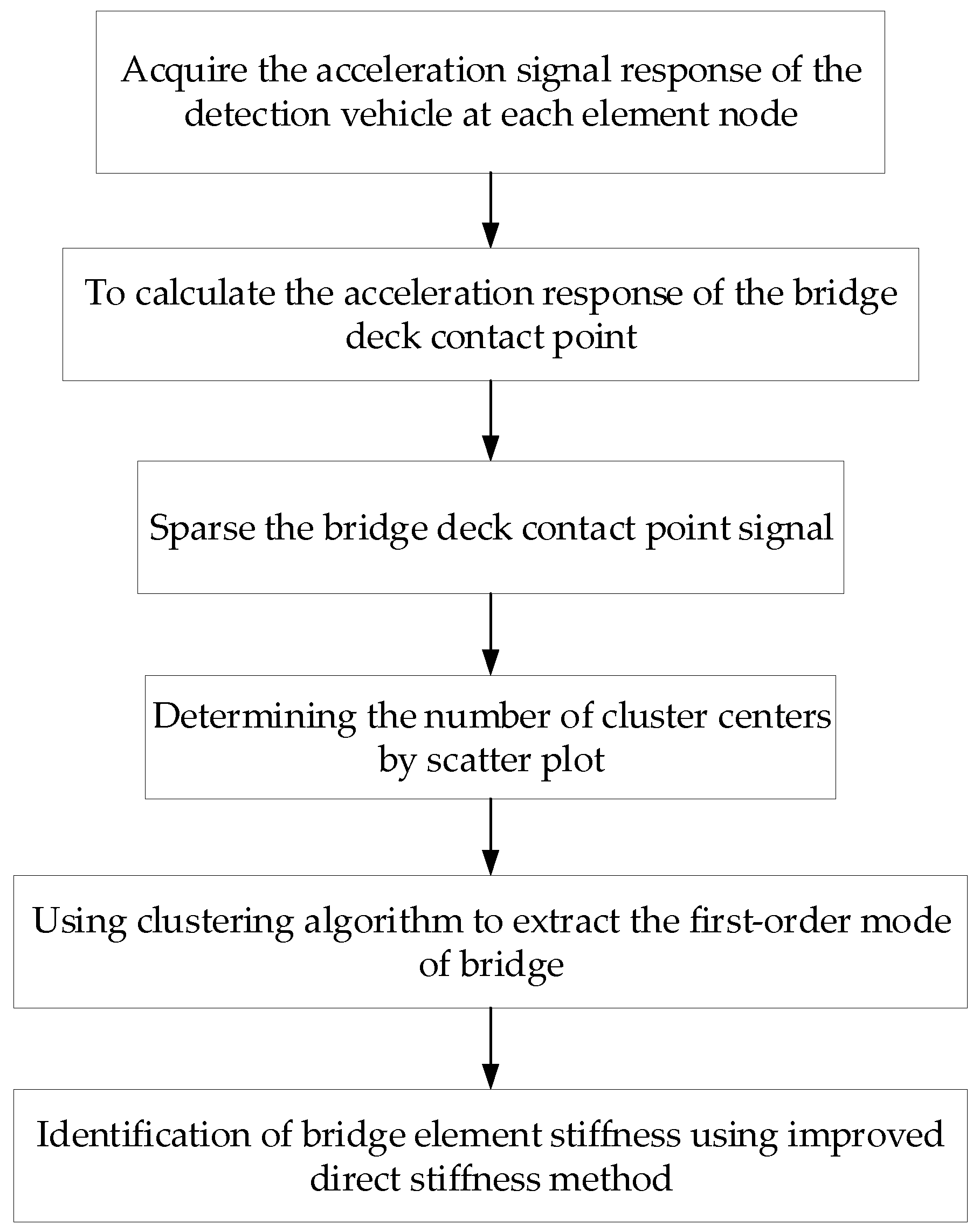
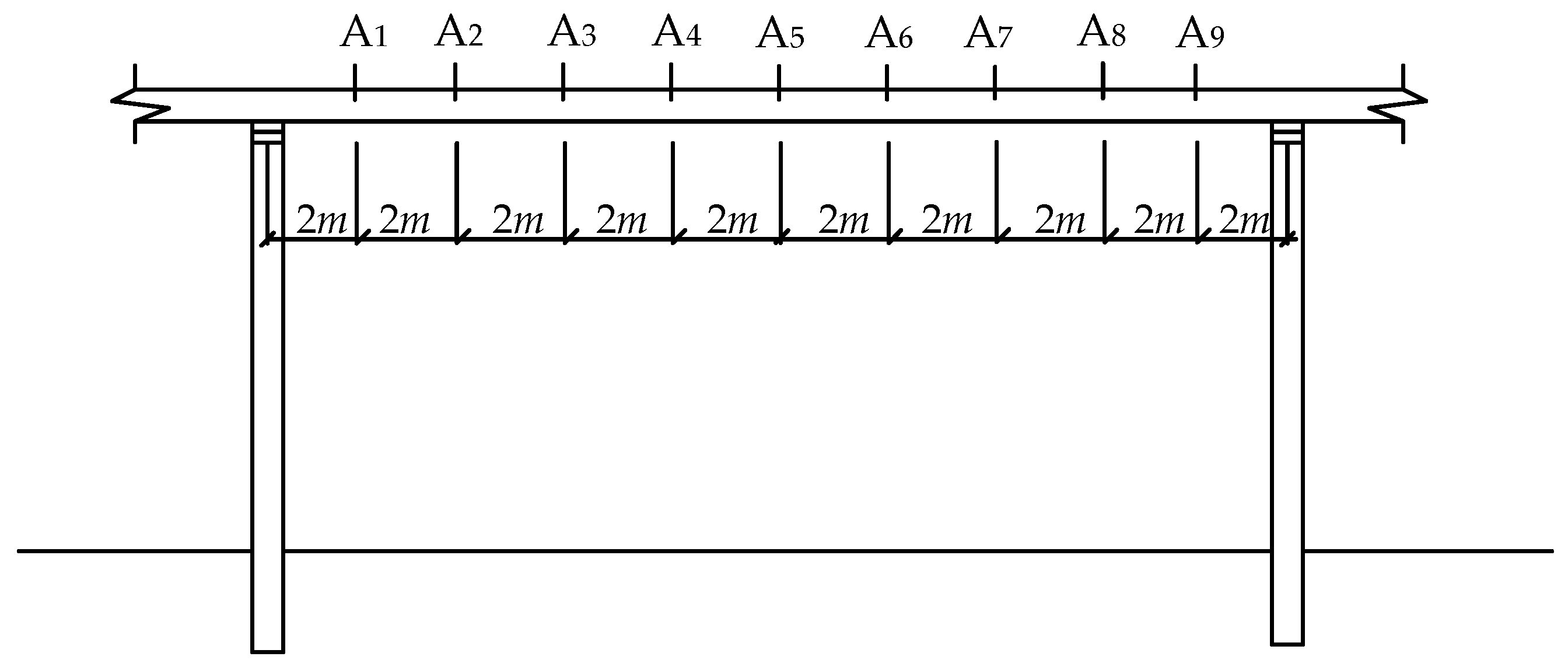
- The bridge is uniformly divided into several elements, as shown in Figure 4, and two test vehicles move to the testing locations. The accelerations of the vehicles are collected and then the vehicles move to other locations. The raw signals are denoised by using the multi-point averaging and smoothing processing method.
- (2)
- Calculating the displacement of the bridge contact point from the collected acceleration of the movable vehicle.
- (3)
- Applying STFT to the displacement of the bridge contact point.
- (4)
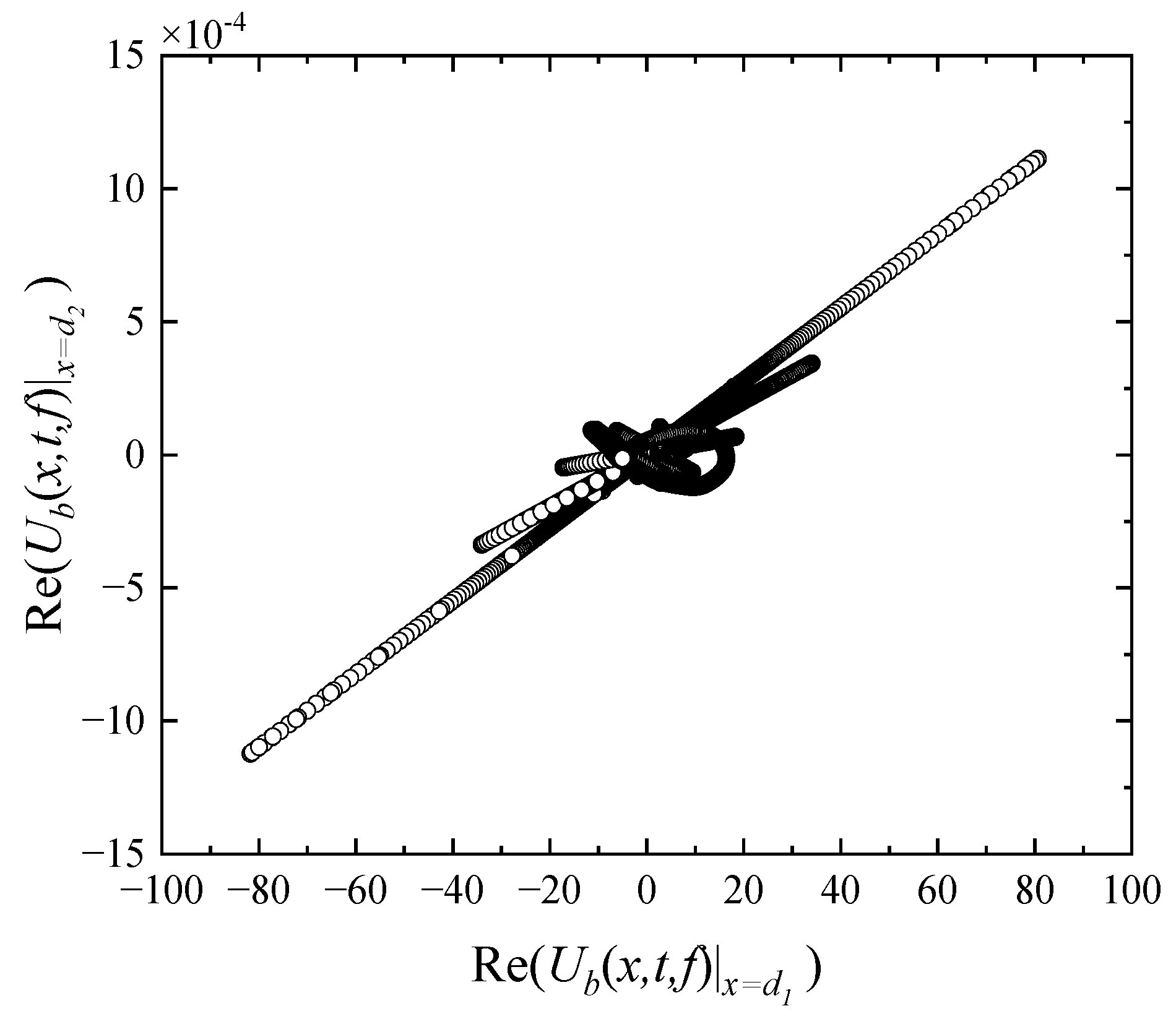
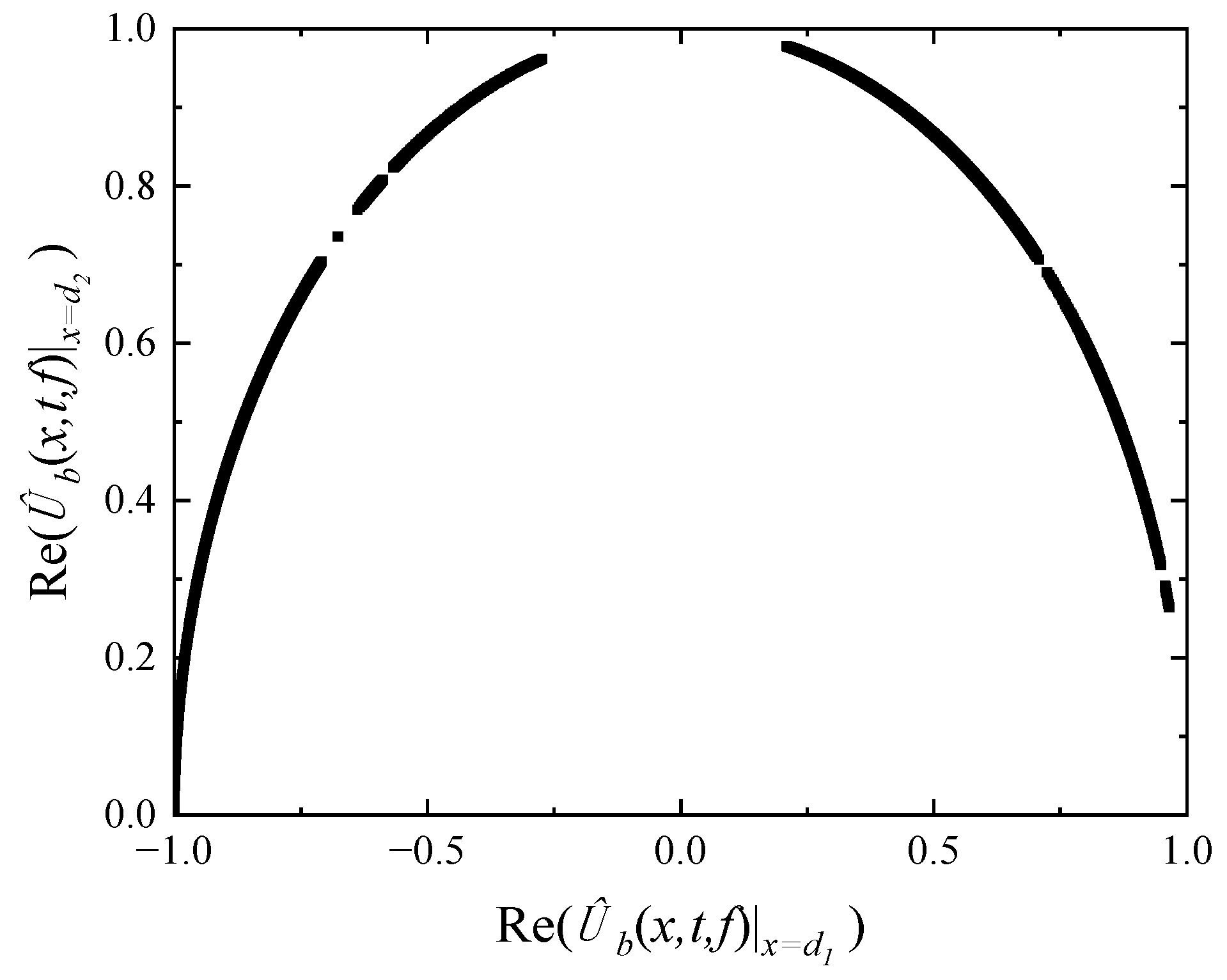
- Plotting the two sets of measurements as a scatter plot and mirroring them to the upper half-unit circle to determine the number of clustering centers.
- (5)
- Extracting single source points from the sparse data and performing cluster analysis to obtain the fundamental mode shape of the bridge.
- (6)
- Employing the improved direct stiffness method to calculate the element stiffness of the bridge.
4. Numerical Simulation
4.1. FE Model
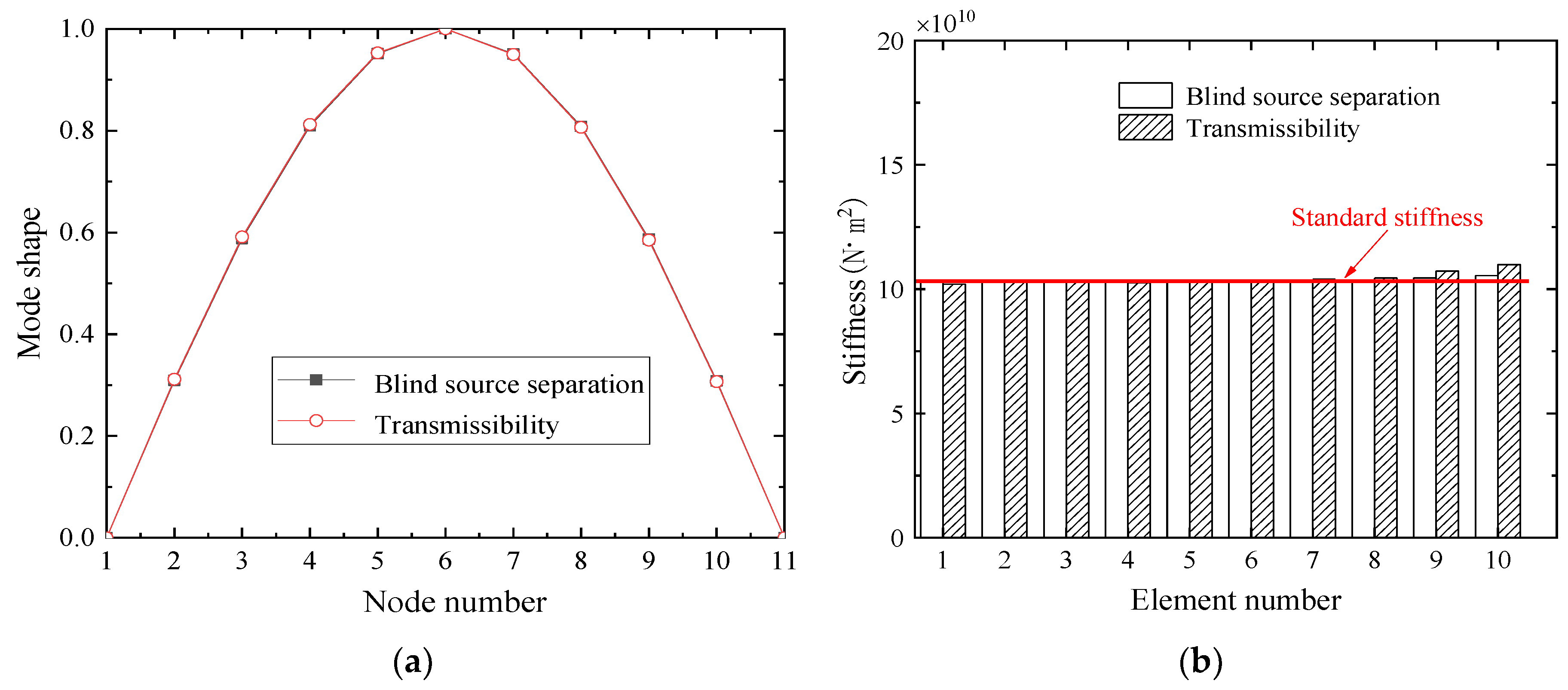
4.2. Comparison of Different Identification Methods
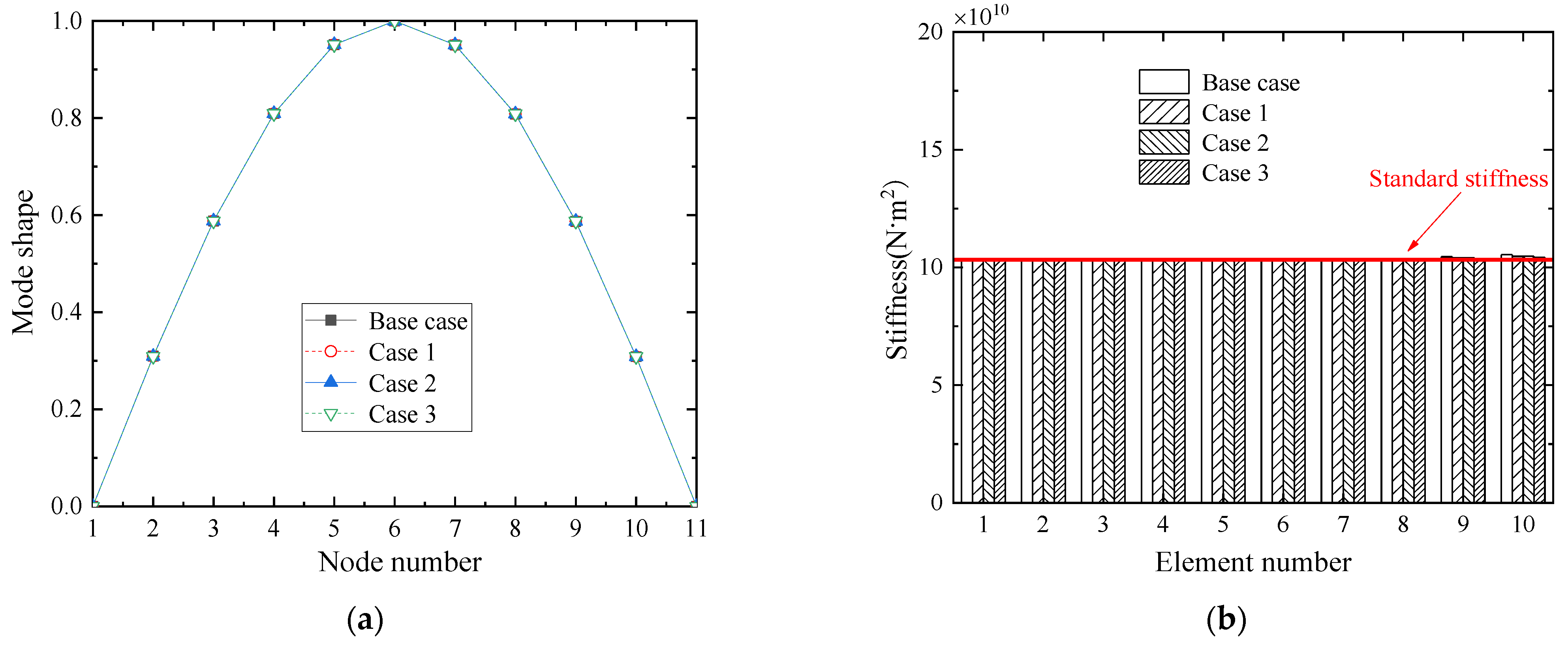
4.3. Effect of Vehicle Property
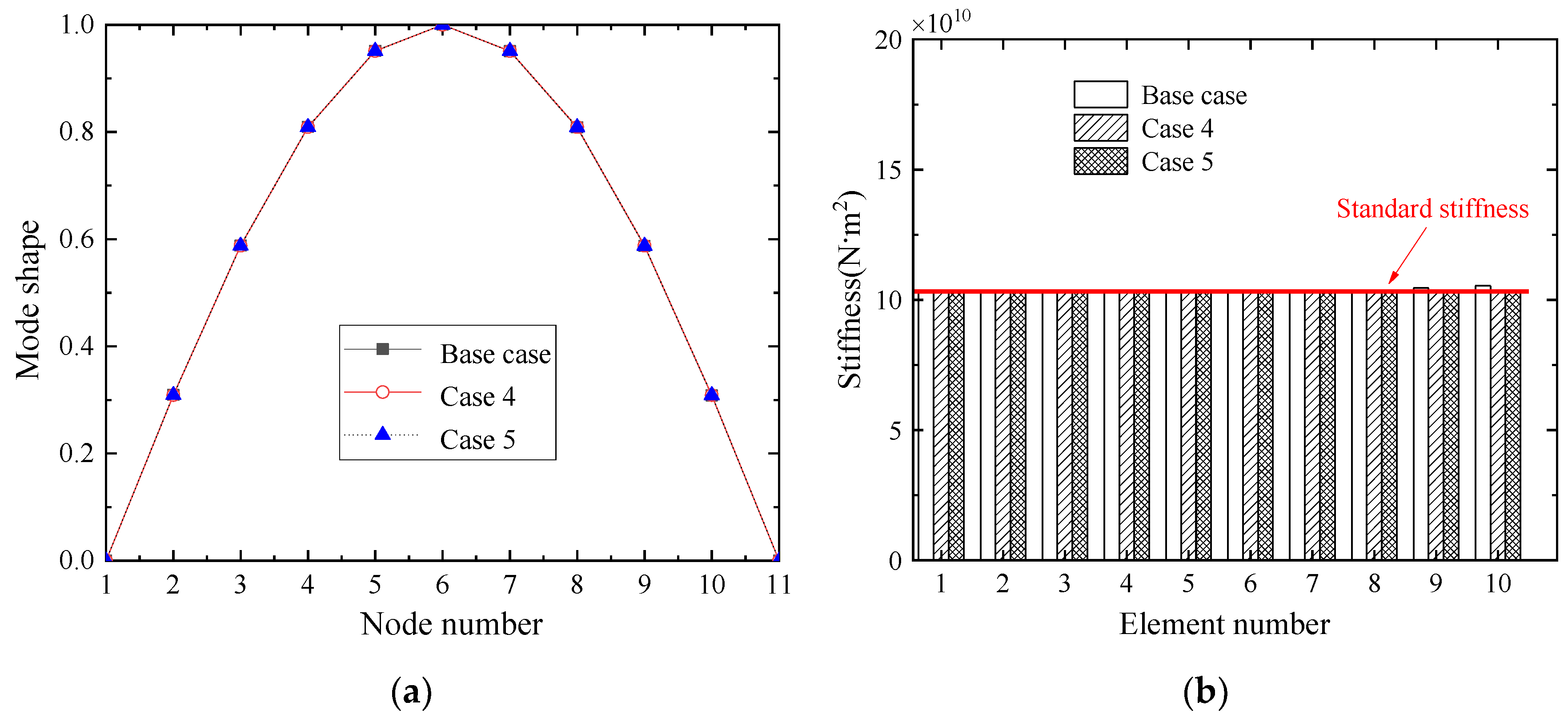
4.4. Effect of Bridge Damping
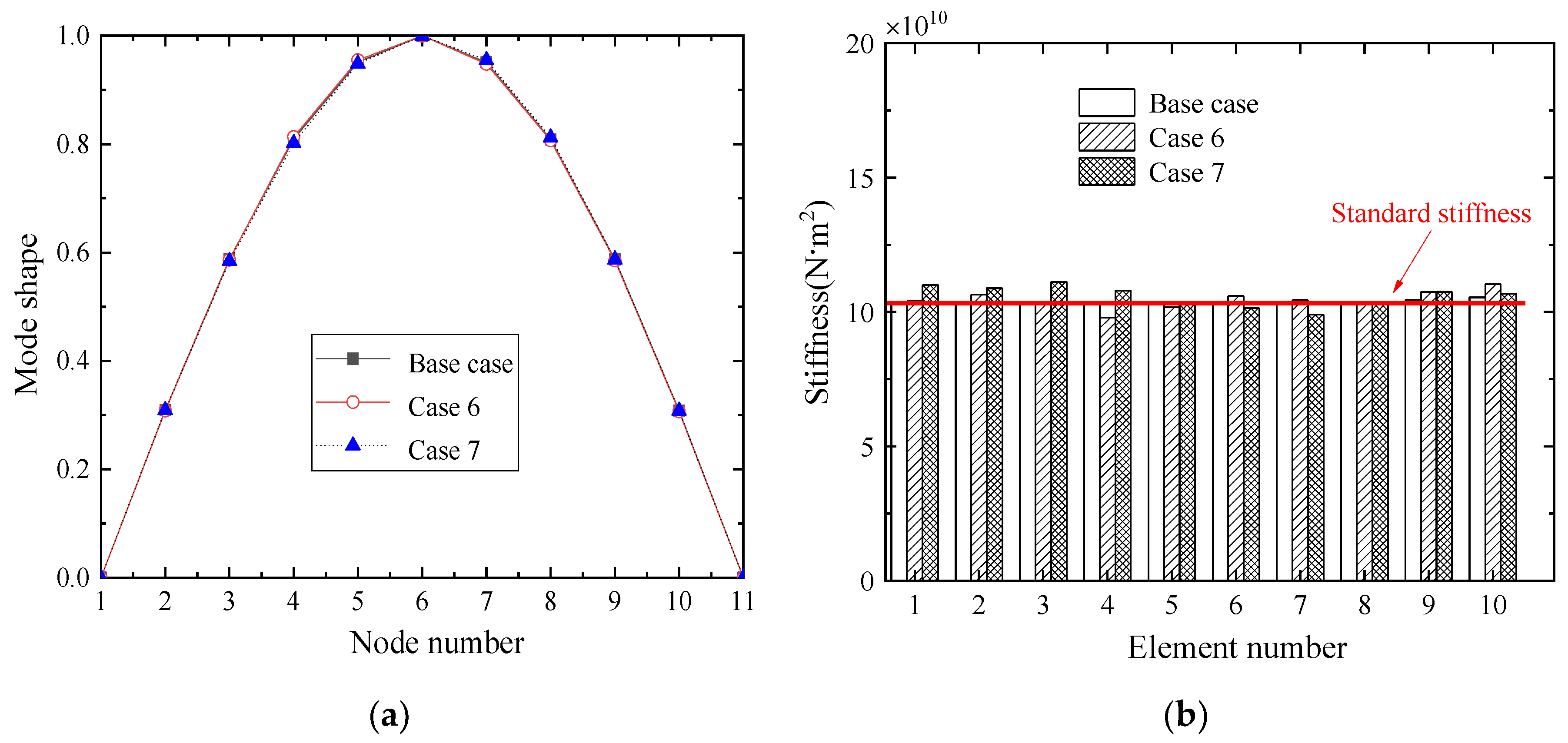
4.5. Effect of Measurement Noise
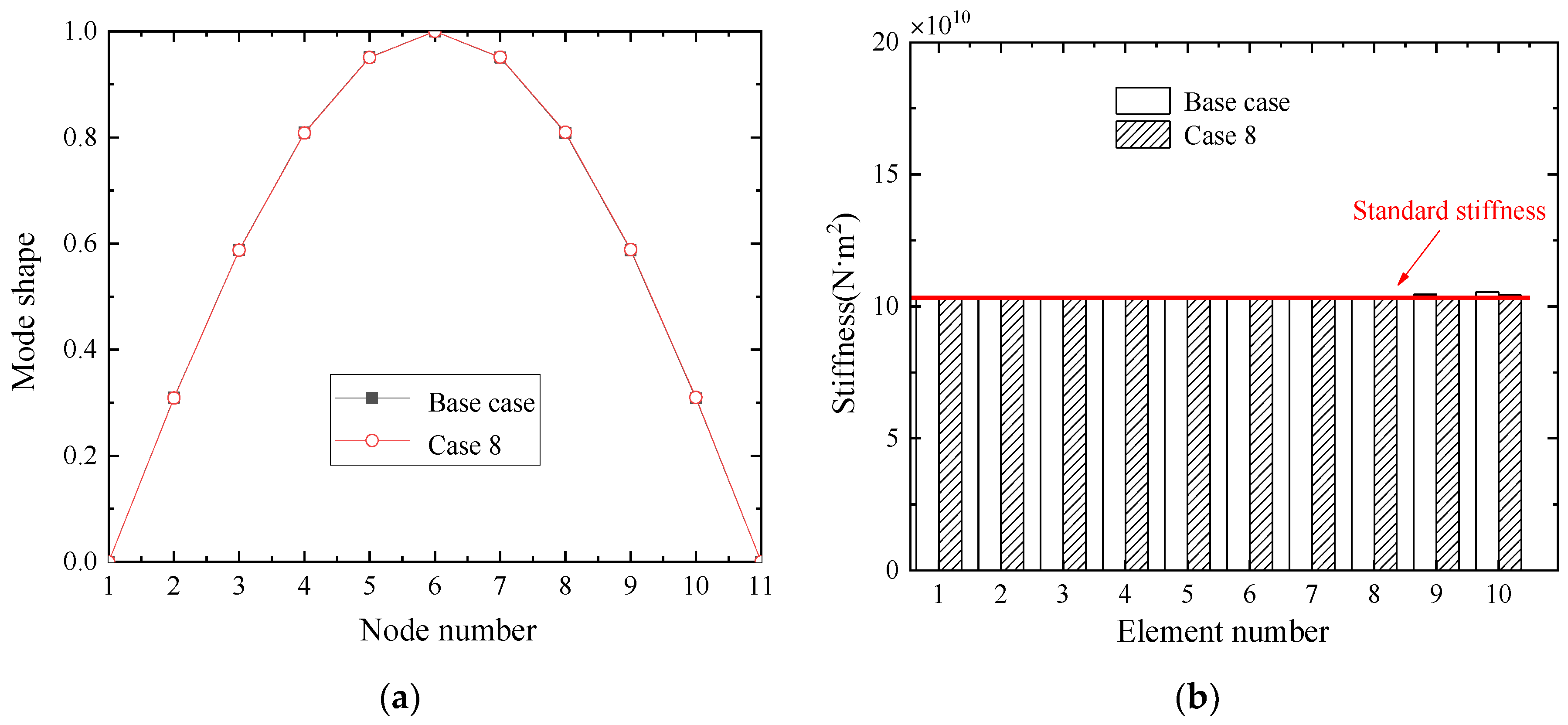
4.6. Effect of External Excitation Variations
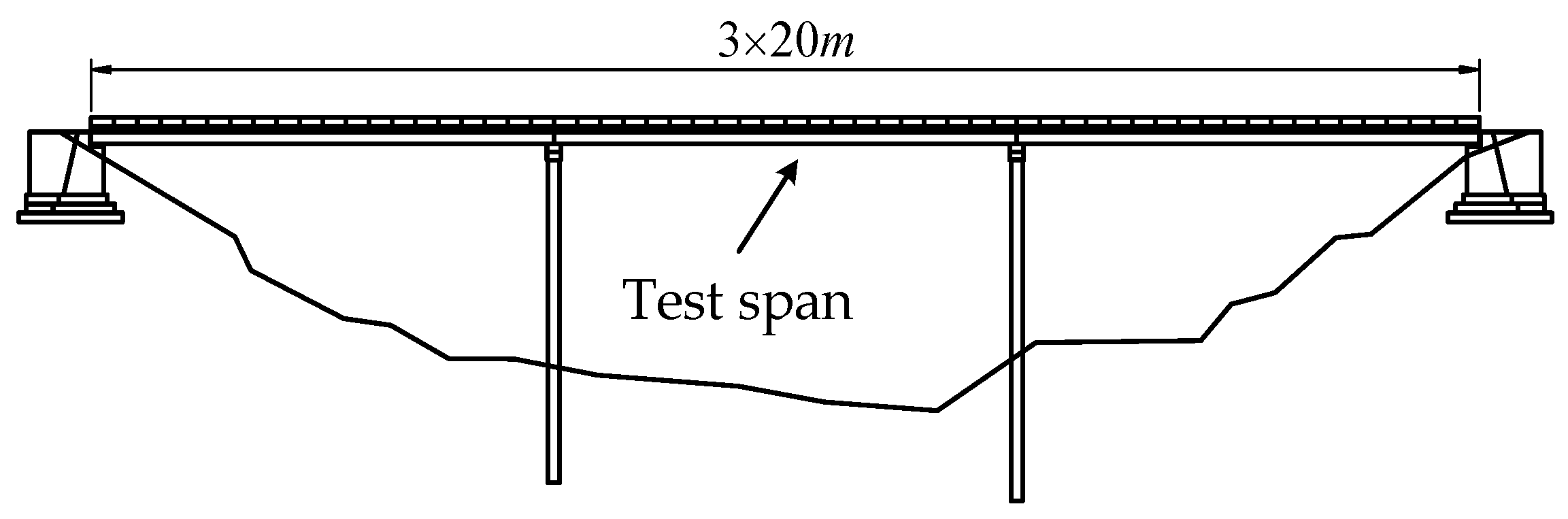
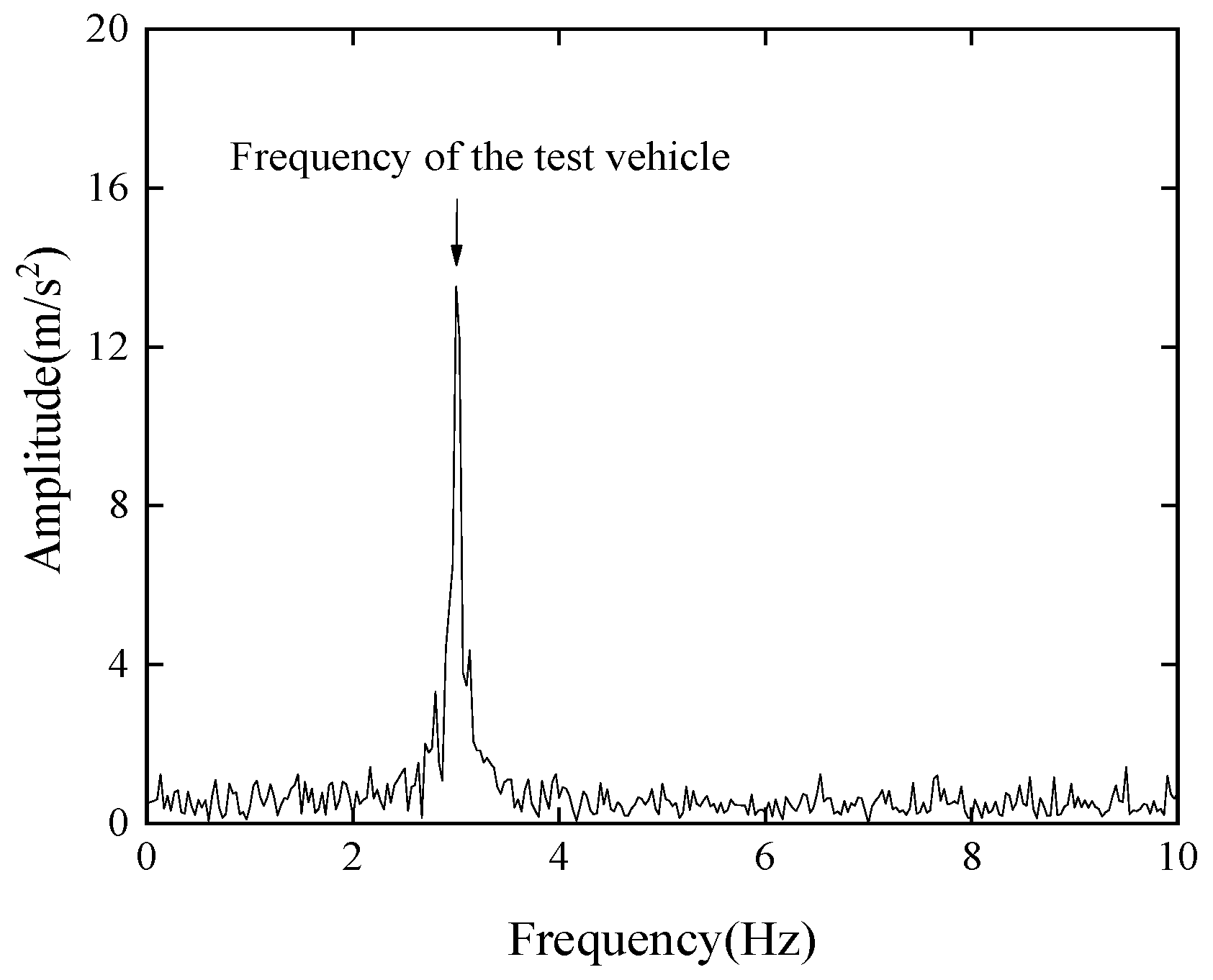
5. Field Measurement
6. Conclusions
- (1)
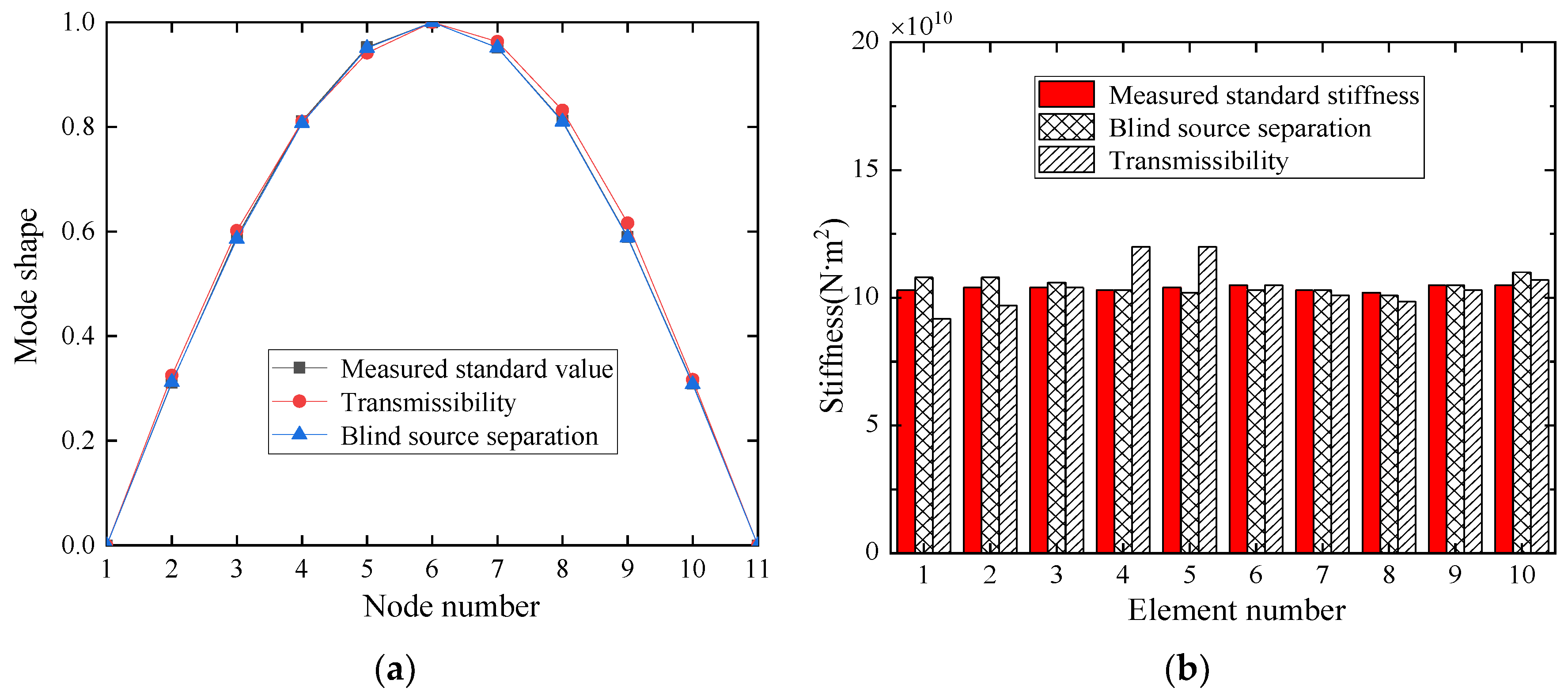
- Through the investigation of a numerical simulation, the proposed method performs better than the transmissibility method.
- (2)
- The proposed method has lower requirements for a test vehicle. It is applicable to a large range of bridge damping ratios and it can perform well when measurement noise exists.
- (3)
- In regard to field measurement, the proposed method can eliminate the adverse effect of road surface roughness and it can accurately extract the fundamental mode shape and further identify the bridge element stiffness without blocking traffic. Therefore, the proposed method will be expected to perform well in bridge structural health monitoring techniques and can be well applied to symmetrical bridge structures to avoid disasters.
- (4)
- Due to the blind source separation technique, the proposed method does not require extraction of bridge frequency by bandpass filtering and pre-defined parameters, which is more convenient in practice.
- (5)
- The indirect approach of obtaining bridge information by test vehicle was used to test bridge structure for the field measurement. Obviously, it has the advantages of low-cost and fast implementation compared with the conventional direct approach.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Ji, X.; Yang, Z.; Huang, X.; Tan, L. Problems in bridge health monitoring and application of intelligent monitoring technology. IOP Conf. Ser. Earth Environ. Sci. 2019, 267, 052015. [Google Scholar] [CrossRef]
- Gomez, H.C.; Fanning, P.J.; Feng, M.Q. Testing and long-term monitoring of a curved concrete box girder bridge. Eng. Struct. 2011, 33, 2861–2869. [Google Scholar] [CrossRef]
- Yang, Y.; Ling, Y.; Tan, X.K.; Wang, S.; Wang, R.Q. Damage identification of frame structure based on approximate Metropolis–Hastings algorithm and probability density evolution method. Int. J. Struct. Stab. Dyn. 2022, 22, 2240014. [Google Scholar] [CrossRef]
- Crespi, P.; Zucca, M.; Valente, M.; Longarini, N. Influence of corrosion effects on the seismic capacity of existing RC bridges. Eng. Fail. Anal. 2022, 140, 106546. [Google Scholar] [CrossRef]
- Yang, Y.; Zhang, Y.; Tan, X. Review on vibration-based structural health monitoring techniques and technical codes. Symmetry 2021, 13, 1998. [Google Scholar] [CrossRef]
- Yang, Y.B.; Yang, J.P. State-of-the-art review on modal identification and damage detection of bridges by moving test vehicles. Int. J. Struct. Stab. Dyn. 2018, 18, 1850025. [Google Scholar] [CrossRef]
- Gong, F.; Han, F.; Wang, Y.; Xia, Y. Bridge damping extraction method from vehicle-bridge interaction system using double-beam model. Appl. Sci. 2021, 11, 10304. [Google Scholar] [CrossRef]
- Yang, Y.-B.; Lin, C.; Yau, J. Extracting bridge frequencies from the dynamic response of a passing vehicle. J. Sound Vib. 2004, 272, 471–493. [Google Scholar] [CrossRef]
- Yang, Y.B.; Li, Y.C.; Chang, K.C. Using two connected vehicles to measure the frequencies of bridges with rough surface: A theoretical study. Acta Mech. 2012, 223, 1851–1861. [Google Scholar] [CrossRef]
- Nagayama, T.; Reksowardojo, A.; Su, D.; Mizutani, T. Bridge natural frequency estimation by extracting the common vibration component from the responses of two vehicles. Eng. Struct. 2017, 150, 821–829. [Google Scholar] [CrossRef]
- Yang, Y.B.; Xu, H.; Zhang, B.; Xiong, F.; Wang, Z.L. Measuring bridge frequencies by a test vehicle in non-moving and moving states. Eng. Struct. 2020, 203, 109859. [Google Scholar] [CrossRef]
- González, A.; Obrien, E.; McGetrick, P. Identification of damping in a bridge using a moving instrumented vehicle. J. Sound Vib. 2012, 331, 4115–4131. [Google Scholar] [CrossRef]
- Yang, Y.B.; Zhang, B.; Chen, Y.; Qian, Y.; Wu, Y. Bridge damping identification by vehicle scanning method. Eng. Struct. 2019, 183, 637–645. [Google Scholar] [CrossRef]
- Tan, C.; Uddin, N.; Obrien, E.J.; McGetrick, P.J.; Kim, C.-W. Extraction of bridge modal parameters using passing vehicle response. J. Bridg. Eng. 2019, 24, 1477. [Google Scholar] [CrossRef]
- Zhang, Y.; Wang, L.; Xiang, Z. Damage detection by mode shape squares extracted from a passing vehicle. J. Sound Vib. 2012, 331, 291–307. [Google Scholar] [CrossRef]
- Yang, Y.; Li, Y.; Chang, K. Constructing the mode shapes of a bridge from a passing vehicle: A theoretical study. Smart Struct. Syst. 2014, 13, 797–819. [Google Scholar] [CrossRef]
- Malekjafrian, A.; Obrien, E.J. On the use of a passing vehicle for the estimation of bridge mode shapes. J. Sound Vib. 2017, 397, 77–91. [Google Scholar] [CrossRef]
- Xu, Y.; Brownjohn, J.M.; Hester, D. Enhanced sparse component analysis for operational modal identification of real-life bridge structures. Mech. Syst. Signal Process. 2018, 116, 585–605. [Google Scholar] [CrossRef]
- Devriendt, C.; Guillaume, P. The use of transmissibility measurements in output-only modal analysis. Mech. Syst. Signal Process. 2007, 21, 2689–2696. [Google Scholar] [CrossRef]
- Devriendt, C.; Guillaume, P. Identification of modal parameters from transmissibility measurements. J. Sound Vib. 2008, 314, 343–356. [Google Scholar] [CrossRef]
- Yang, Y.B.; Wang, Z.; Shi, K.; Xu, H. Research progress on bridge indirect measurement and monitoring from moving vehicle response. China J. Highw. Transp. 2021, 34, 1–12. [Google Scholar]
- Zhang, H.; Zhong, Z.X.; Duan, J.M.; Yang, J.K.; Zheng, Z.C.; Liu, G.G. Damage identification method for medium- and small-span bridges based on macro-strain data under vehicle-bridge coupling. Materials 2022, 15, 1097. [Google Scholar] [CrossRef] [PubMed]
- Mei, Q.; Gül, M.; Boay, M. Indirect health monitoring of bridges using mel-frequency cepstral coefficients and principal component analysis. Mech. Syst. Signal Process. 2018, 119, 523–546. [Google Scholar] [CrossRef]
- Yang, Y.; Lu, H.; Tan, X.; Chai, H.K.; Wang, R.; Zhang, Y. Fundamental mode shape estimation and element stiffness evaluation of girder bridges by using passing tractor-trailers. Mech. Syst. Signal Process. 2021, 169, 108746. [Google Scholar] [CrossRef]
- Zhang, B.; Qian, Y.; Wu, Y.; Yang, Y.B. An effective means for damage detection of bridges using the con-tact-point response of a moving test vehicle. J. Sound Vib. 2018, 419, 158–172. [Google Scholar] [CrossRef]
- Yang, M.; Liu, C. Possibility of bridge inspection through drive-by vehicles. Appl. Sci. 2020, 11, 69. [Google Scholar] [CrossRef]
- Pourzeynali, S.; Zhu, X.Q.; Ghari Zadeh, A.; Rashidi, M.; Samali, B. Simultaneous identification of bridge structural damage and moving loads using the explicit form of newmark-β method: Numerical and experimental studies. Remote Sens. 2021, 14, 119. [Google Scholar] [CrossRef]
- Yang, Y.B.; Zhang, B.; Qian, Y.; Wu, Y. Contact-point response for modal identification of bridges by a moving test vehicle. Int. J. Struct. Stab. Dyn. 2017, 18, 1850073. [Google Scholar] [CrossRef]
- Yang, Y.; Lu, H.; Tan, X.; Wang, R.; Zhang, Y. Mode shape identification and damage detection of bridge by movable sensory system. IEEE Trans. Intell. Transp. Syst. 2022, in press. [Google Scholar]
- Yang, D.; Yi, C.; Xu, Z.; Zhang, Y.; Ge, M.; Liu, C. Improved tensor-based singular spectrum analysis based on single channel blind source separation algorithm and its application to fault diagnosis. Appl. Sci. 2017, 7, 418. [Google Scholar] [CrossRef]
- Abazarsa, F.; Nateghi, F.; Ghahari, S.F.; Taciroglu, E. Extended blind modal identification technique for nonstationary excitations and its verification and validation. J. Eng. Mech. 2015, 142, 04015078. [Google Scholar] [CrossRef]
- Qin, S.; Guo, J.; Zhu, C. Sparse component analysis using time-frequency representations for operational modal analysis. Sensors 2015, 15, 6497–6519. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Martinez, B.; Green, A.; Silva, M.F.; Mascareñas, D.; Yang, Y. Sparse and random sampling techniques for high-resolution, full-field, bss-based structural dynamics identification from video. Sensors 2020, 20, 3526. [Google Scholar] [CrossRef]
- Yang, Y.; Liang, J.; Yuan, A.; Lu, H.; Luo, K.; Shen, X.; Wan, Q. Bridge element bending stiffness damage identification based on new indirect measurement method. China J. Highw. Transp. 2021, 34, 188–198. [Google Scholar]
- Yang, Y.C.; Nagarajaiah, S. Blind identification of damage in time-varying systems using independent component analysis with wavelet transform. Mech. Syst. Signal Process. 2014, 47, 3–20. [Google Scholar] [CrossRef]
- Kong, X.; Cai, C.S.; Deng, L. Using dynamic responses of moving vehicles to extract bridge modal proper-ties of a field bridge. J. Bridge Eng. 2017, 22, 04017018. [Google Scholar] [CrossRef]
- Obrien, E.J.; Martinez, D.; Malekjafarian, A.; Sevillano, E.; Otero, D.M. Damage detection using curvatures obtained from vehicle measurements. J. Civ. Struct. Health Monit. 2017, 7, 333–341. [Google Scholar] [CrossRef]
- Sadhu, A.; Narasimhan, S.; Antoni, J. A review of output-only structural mode identification literature employing blind source separation methods. Mech. Syst. Signal Process. 2017, 94, 415–431. [Google Scholar] [CrossRef]
- Zhao, H.-W.; Ding, Y.; Li, A.; Ren, Z.; Yang, K. Live-load strain evaluation of the prestressed concrete box-girder bridge using deep learning and clustering. Struct. Health Monit. 2019, 19, 1051–1063. [Google Scholar] [CrossRef]
- Zhao, H.W.; Ding, Y.L.; Li, A.Q. Representation of in-service performance for cable-stayed railway-highway combined bridges based on train-induced response’s sensing data and knowledge. Sensors 2022, 22, 3247. [Google Scholar] [CrossRef]
- Yi, T.-H.; Yao, X.-J.; Qu, C.-X.; Li, H.-N. Clustering number determination for sparse component analysis during output-only modal identification. J. Eng. Mech. 2019, 145, 1557. [Google Scholar] [CrossRef]
- Amini, F.; Hedayati, Y. Underdetermined blind modal identification of structures by earthquake and ambient vibration measurements via sparse component analysis. J. Sound Vib. 2016, 366, 117–132. [Google Scholar] [CrossRef]
- Yang, Y.; Mosalam, K.M.; Liu, G.; Wang, X. Damage detection using improved direct stiffness calculations—A case study. Int. J. Struct. Stab. Dyn. 2016, 16, 1640002. [Google Scholar] [CrossRef] [Green Version]
- Wl, A.; Js, B.; Lr, A.; Is, B.; Sa, C. Using drive-by health monitoring to detect bridge damage considering environmental and operational effects. J. Sound Vib. 2020, 468, 115088. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Scenario | Moving Vehicle No. | Time of Entry (s) | Mass (Kg) | Speed (m/s) |
|---|---|---|---|---|
| 1 | No. 1 | 3 | 2489 | 6 |
| No. 2 | 2 | 1074 | 10 | |
| No. 3 | 0 | 3678 | 2 | |
| No. 4 | 0 | 3422 | 1 | |
| 2 | No. 1 | 2 | 4069 | 2 |
| No. 2 | 4 | 4898 | 3 | |
| No. 3 | 3 | 3212 | 3 | |
| No. 4 | 4 | 1760 | 5 | |
| No. 5 | 4 | 1203 | 1 |
| Case No. | Mass mv1,2 (kg) | Stiffness kv1,2 (kN/m) | Damping cv1,2 (N·s/m) | Frequency fv1,2 (Hz) | Bridge Damping Ratio | Noise Level (SNR: dB) | Excitation Scenario | Remarks |
|---|---|---|---|---|---|---|---|---|
| Base Case | 1470 | 524.076 | 1000 | 3.00 | 0.004 | Noise-Free | 1 | |
| 1 | 1000 | 524.076 | 1000 | 3.64 | 0.004 | Noise-Free | 1 | Effect of vehicle properties |
| 2 | 1470 | 524.076 | 400 | 3.00 | 0.004 | Noise-Free | 1 | |
| 3 | 1000 | 524.076 | 400 | 3.64 | 0.004 | Noise-Free | 1 | |
| 4 | 1470 | 524.076 | 1000 | 3.00 | 0.000 | Noise-Free | 1 | Effect of bridge damping ratio |
| 5 | 1470 | 524.076 | 1000 | 3.00 | 0.010 | Noise-Free | 1 | |
| 6 | 1470 | 524.076 | 1000 | 3.00 | 0.004 | 40 dB | 1 | Effect of measurement noise |
| 7 | 1470 | 524.076 | 1000 | 3.00 | 0.004 | 30 dB | 1 | |
| 8 | 1470 | 524.076 | 1000 | 3.00 | 0.004 | Noise-Free | 2 | Effect of traffic flow |
| Methods | Blind Source Separation | Transmissibility | Direct Measurement by Accelerometer | Direct Measurement by Total Station |
|---|---|---|---|---|
| Vertical displacement (mm) | 2.15 | 2.09 | 2.18 | 2.24 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, Y.; Tan, X.; Lu, H.; Xue, S.; Wang, R.; Zhang, Y. Indirect Approach to Identify Girder Bridge Element Stiffness Based on Blind Source Separation. Symmetry 2022, 14, 1963. https://doi.org/10.3390/sym14101963
Yang Y, Tan X, Lu H, Xue S, Wang R, Zhang Y. Indirect Approach to Identify Girder Bridge Element Stiffness Based on Blind Source Separation. Symmetry. 2022; 14(10):1963. https://doi.org/10.3390/sym14101963
Chicago/Turabian StyleYang, Yang, Xiaokun Tan, Huicheng Lu, Shangling Xue, Ruiqiong Wang, and Yao Zhang. 2022. "Indirect Approach to Identify Girder Bridge Element Stiffness Based on Blind Source Separation" Symmetry 14, no. 10: 1963. https://doi.org/10.3390/sym14101963