
Interior Distance Ratio to a Regular Shape for Fast Shape Recognition


Abstract
:1. Introduction
- (1)
- The rectangularity and circularity of shape are proposed selectively to judge the initial feature of the shape;
- (2)
- A new shape feature based on the vertical interior distance to the minimum bounding rectangle is proposed to describe some shapes that are more like a rectangle;
- (3)
- A new shape feature based on the diameter interior distance to the minimum circumscribed circle is proposed to describe some shapes that are more like a circle;
- (4)
- A new and more effective shape recognition method is proposed, which provides greater possibilities for the practical application of object detection and recognition, including faster speed and higher recognition accuracy.
2. Preliminary
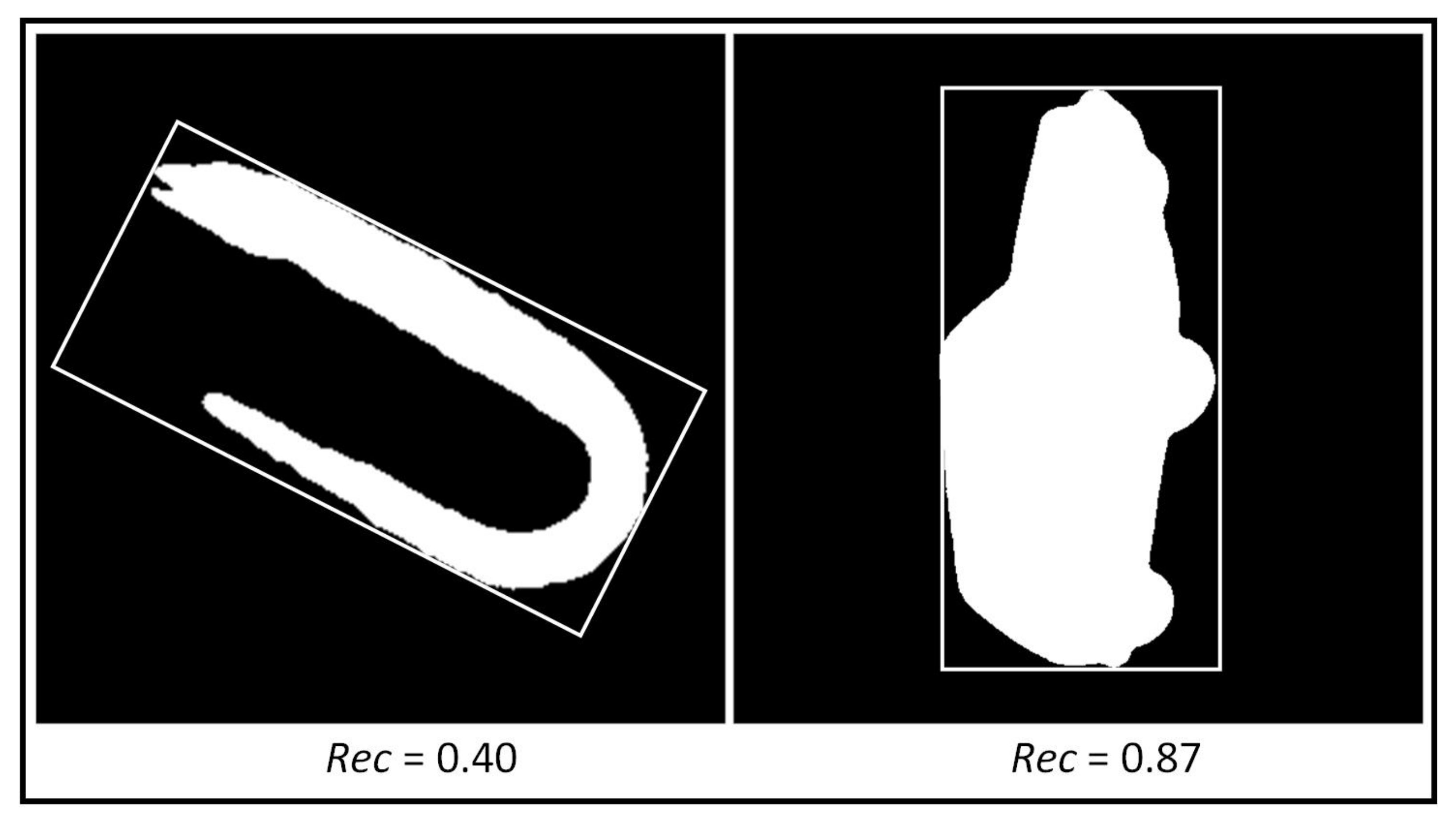
2.1. Rectangularity
2.1.1. The Acquisition Strategy of Minimum Bounding Rectangle
- Find the four points with the largest and smallest coordinates of UDLR(Up, Down, Left, Right);
- Four tangents can be constructed by these four points;
- If one (or two) lines coincide with one side, the area of the rectangle constructed by the four lines is calculated and defined as the current minimum area. Otherwise, the current minimum area is defined as infinity;
- Rotate the lines clockwise until one of them coincides with an edge of the polygon;
- Calculate the area of the new rectangle and compare it with the current minimum area. If it is less than that, update and save the area of the new rectangle as the minimum area;
- Repeat Step 4 and 5 until the angle of the line is rotated by more than 90°;
- Get the minimum bounding rectangle.
2.1.2. The Calculation Method of Rectangularity
2.2. Circularity
2.2.1. The Acquisition Strategy of Minimum Circumscribed Circle
- Find in the contour point set P;
- Use the above points to construct the circumscribed circle C;
- Query the point Q, which is the farthest point from the centre of C in the point set P. If Q is inside the C, the step terminates. Otherwise, carry out Step 4;
- For the points of , and Q, construct the circumscribed circle D; it contains the above points. Then, go to Step 2. Until the minimum circumscribed circle is found;
- Output the minimum circumscribed circle.
2.2.2. The Calculation Method of Circularity
2.3. The Effectiveness of Rectangularity and Circularity
2.4. Interior Distance
3. SIDR
3.1. The Similarity of the Shape to the Minimum Bounding Rectangle and the Minimum Circumscribed Circle
3.2. Interior Distance Ratio to Minimum Bounding Rectangle of a Shape
- Obtain the minimum bounding rectangle of the shape according to the Section 2.1.1;
- Use perpendicular segments from the shape contour point , where is the number of the contour points) to the four sides of the minimum bounding rectangle, at same time, ensuring perpendicular points are on the four sides. These perpendicular segments are defined as , respectively. These perpendicular segments within the shape are defined as ;
- Then, summing the Euclidean distance of four perpendicular segments by formula , summing the interior distance of four perpendicular segments by formula . Then, the interior distance ratio of current point is , calculating by the equation of . It is worth mentioning that is a fixed value in this paper, and its value is equal to half of the perimeter of the minimum bounding rectangle;
- According to the Section 2.3, in the image, the author transforms the interior distance to the intersecting pixels so that the computation is smaller and the algorithm is faster. So, they calculate the number of pixels of perpendicular segments and these perpendicular segments within the shape, respectively. The number are defined as and respectively;
- The interior distance ratio is calculated by the number ratio of pixels. The calculating equation is .
3.3. Interior Distance Ratio to Minimum Circumscribed Circle of a Shape
- Obtain the minimum circumscribed circle of the shape according to Section 2.2.1;
- A point , where is the number of the contour points) on the shape contour is connected to the contour of the minimum circumscribed circle, and the segment or extension of the segment must intersect the center point of the circle. This can formed two segments; these two diameter segments are defined as respectively. These segments within the shape are defined as ;
- Then, summing the Euclidean distance of two segments via formula , summing the interior distance of two diameter segments via formula . Then, the interior distance ratio of the current point is , calculating by the equation of . It is worth mentioning similarity that is also a fixed value in this paper, and its value is equal to the diameter of the minimum circumscribed circle;
- According to Section 2.3, in the image, we convert the interior distance to the intersecting pixels so that the computation is smaller and the algorithm is faster. So, we calculate the number of pixels of two diameter segments and these segments within the shape, respectively. The numbers are defined as and , respectively;
- The interior distance ratio is calculated by the number ratio of pixels. The calculating equation is .
3.4. The Proposed Feature
3.5. Shape Matching
4. Performance and Analysis
4.1. Performance in SIDR 100
4.2. Performance in Mpeg 1400
4.3. Performance in Leaf 270
4.4. Performance in Kim 99
4.5. Use Different Regular Shapes
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Samet, H. Hierarchical representations of collections of small rectangles. ACM Comput. Surv. (CSUR) 1988, 20, 271–309. [Google Scholar] [CrossRef]
- Wang, Z.; Jiang, Y.; Hu, X. A leaf type recognition algorithm based on SVM optimized by improved grid search method. In Proceedings of the 2020 5th International Conference on Electromechanical Control Technology and Transportation (ICECTT), Nanchang, China, 15–17 May 2020; pp. 312–316. [Google Scholar]
- Premachandran, V.; Kakarala, R. Perceptually motivated shape context which uses shape interiors. Pattern Recognit. 2013, 46, 2092–2102. [Google Scholar] [CrossRef]
- Alajlan, N.; El Rube, I.; Kamel, M.S.; Freeman, G. Shape retrieval using triangle-area representation and dynamic space warping. Pattern Recognit. 2007, 40, 1911–1920. [Google Scholar] [CrossRef]
- Yang, X.; Bai, X.; Latecki, L.J.; Tu, Z. Improving shape retrieval by learning graph transduction. In Proceedings of the European Conference on Computer Vision, Marseille, France, 12–18 October 2008; pp. 788–801. [Google Scholar]
- Felzenszwalb, P.F.; Schwartz, J.D. Hierarchical matching of deformable shapes. In Proceedings of the 2007 IEEE conference on computer vision and pattern recognition, Minneapolis, MN, USA, 18–23 June 2007; pp. 1–8. [Google Scholar]
- Zhang, D.; Lu, G. Study and evaluation of different Fourier methods for image retrieval. Image Vis. Comput. 2005, 23, 33–49. [Google Scholar] [CrossRef]
- Chang, C.C.; Hwang, S.; Buehrer, D.J. A shape recognition scheme based on relative distances of feature points from the centroid. Pattern Recognit. 1991, 24, 1053–1063. [Google Scholar] [CrossRef]
- El-ghazal, A.; Basir, O.; Belkasim, S. Farthest point distance: A new shape signature for Fourier descriptors. Signal Process. Image Commun. 2009, 24, 572–586. [Google Scholar] [CrossRef]
- Yang, H.S.; Lee, S.U.; Lee, K.M. Recognition of 2D object contours using starting-point-independent wavelet coefficient matching. J. Vis. Commun. Image Represent. 1998, 9, 171–181. [Google Scholar] [CrossRef]
- Belongie, S.; Malik, J.; Puzicha, J. Shape matching and object recognition using shape contexts. IEEE Trans. Pattern Anal. Mach. Intell. 2002, 24, 509–522. [Google Scholar] [CrossRef]
- Li, Z.; Guo, B.; Meng, F. Fast Shape Recognition via the Restraint Reduction of Bone Point Segment. Symmetry 2022, 14, 1670. [Google Scholar] [CrossRef]
- Li, Z.; Guo, B.; Wang, C.; Guo, M. A Fourier Descriptor for Bone Point Segmentation using inner distance in remote sensing images. In Proceedings of the 2022 IEEE 46th Annual Computers, Software, and Applications Conference (COMPSAC), Los Alamitos, CA, USA , 27 June–1 July 2022; pp. 383–387. [Google Scholar]
- Zheng, Y.; Guo, B.; Chen, Z.; Li, C. A Fourier descriptor of 2D shapes based on multiscale centroid contour distances used in object recognition in remote sensing images. Sensors 2019, 19, 486. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ling, H.; Jacobs, D.W. Shape classification using the inner-distance. IEEE Trans. Pattern Anal. Mach. Intell. 2007, 29, 286–299. [Google Scholar] [PubMed]
- Kaothanthong, N.; Chun, J.; Tokuyama, T. Distance interior ratio: A new shape signature for 2D shape retrieval. Pattern Recognit. Lett. 2016, 78, 14–21. [Google Scholar] [CrossRef]
- Fotopoulou, F.; Economou, G. Multivariate angle scale descriptor of shape retrieval. In Proceedings of the SPAMEC, Cluj-Napoca, Romania, 26–28 August 2011; pp. 26–28. [Google Scholar]
- Wang, B.; Gao, Y.; Sun, C.; Blumenstein, M.; La Salle, J. Can walking and measuring along chord bunches better describe leaf shapes? In Proceedings of the Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 6119–6128. [Google Scholar]
- Shu, X.; Wu, X.J. A novel contour descriptor for 2D shape matching and its application to image retrieval. Image Vis. Comput. 2011, 29, 286–294. [Google Scholar] [CrossRef]
- Zhang, J.; Wenyin, L. A pixel-level statistical structural descriptor for shape measure and recognition. In Proceedings of the 2009 10th International Conference on Document Analysis and Recognition, Barcelona, Spain, 26–29 July 2009; pp. 386–390. [Google Scholar]
- Rosin, P.L. Measuring rectangularity. Mach. Vis. Appl. 1999, 11, 191–196. [Google Scholar] [CrossRef]
- Liao, N.N.; Guo, B.; Li, Z.; Zheng, Y. An Advanced Fourier Descriptor Based on Centroid Contour Distances. J. Physics: Conf. Ser. 2021, 1735, 012002. [Google Scholar]
- Picinbono, B. On circularity. IEEE Trans. Signal Process. 1994, 42, 3473–3482. [Google Scholar] [CrossRef]
- Wang, W.; Wang, W.; Wang, J. Algorithm for finding the smallest circle containing all points in a given point set. Ruan Jian Xue Bao/J. Softw. 2000. Available online: https://scholar.google.com.sg/scholar?hl=zh-TW&as_sdt=0%2C5&q=Algorithm+for+finding+the+smallest+circle+containing+all+points+in+a+++given+point+set.&btnG= (accessed on 15 August 2022).
- Berretti, S.; Del Bimbo, A.; Pala, P. Retrieval by shape similarity with perceptual distance and effective indexing. IEEE Trans. Multimed. 2000, 2, 225–239. [Google Scholar]
- Li, Z.; Guo, B.; He, F. A multi-angle shape descriptor with the distance ratio to vertical bounding rectangles. In Proceedings of the 2021 International Conference on Content-Based Multimedia Indexing (CBMI), Lille, France, 28–30 June 2021; pp. 1–4. [Google Scholar]
- Rustamov, R.M.; Lipman, Y.; Funkhouser, T. Interior distance using barycentric coordinates. In Proceedings of the Computer Graphics Forum; Wiley Online Library: Hoboken, NJ, USA, 2009; Volume 28, pp. 1279–1288. [Google Scholar]
- Li, Z.; Guo, B.; Ren, X.; Liao, N. Vertical Interior Distance Ratio to Minimum Bounding Rectangle of a Shape. In Proceedings of the International Conference on Hybrid Intelligent Systems, Virtual, 14–16 December 2020; pp. 1–10. [Google Scholar]
- Albawendi, S.; Lotfi, A.; Powell, H.; Appiah, K. Video based fall detection using features of motion, shape and histogram. In Proceedings of the 11th Pervasive Technologies Related to Assistive Environments Conference, Corfu, Greece, 26–29 June 2018; pp. 529–536. [Google Scholar]
- Cho, S.I.; Kang, S.J. Histogram shape-based scene-change detection algorithm. IEEE Access 2019, 7, 27662–27667. [Google Scholar] [CrossRef]
- Fanfani, M.; Bellavia, F.; Iuliani, M.; Piva, A.; Colombo, C. FISH: Face intensity-shape histogram representation for automatic face splicing detection. J. Vis. Commun. Image Represent. 2019, 63, 102586. [Google Scholar] [CrossRef]
- Schroeder, R.; Schwingel, P.R.; Correia, A.T. Population structure of the Brazilian sardine (Sardinella brasiliensis) in the Southwest Atlantic inferred from body morphology and otolith shape signatures. Hydrobiologia 2022, 849, 1367–1381. [Google Scholar] [CrossRef]
- Yildirim, M.E. Quadrant-based contour features for accelerated shape retrieval system. J. Electr. Eng. 2022, 73, 197–202. [Google Scholar] [CrossRef]
- Zahn, C.T.; Roskies, R.Z. Fourier descriptors for plane closed curves. IEEE Trans. Comput. 1972, 100, 269–281. [Google Scholar] [CrossRef]
- Abbas, S.; Farhan, S.; Fahiem, M.A.; Tauseef, H. Efficient shape classification using Zernike moments and geometrical features on MPEG-7 dataset. Adv. Electr. Comput. Eng. 2019, 19, 45–51. [Google Scholar] [CrossRef]
- Wang, B.; Gao, Y.; Sun, C.; Blumenstein, M.; La Salle, J. Chord Bunch Walks for Recognizing Naturally Self-Overlapped and Compound Leaves. IEEE Trans. Image Process. 2019, 28, 5963–5976. [Google Scholar] [CrossRef] [PubMed]
- Yang, C.; Wei, H.; Yu, Q. A novel method for 2D nonrigid partial shape matching. Neurocomputing 2018, 275, 1160–1176. [Google Scholar] [CrossRef]
- Hu, R.; Jia, W.; Ling, H.; Huang, D. Multiscale distance matrix for fast plant leaf recognition. IEEE Trans. Image Process. 2012, 21, 4667–4672. [Google Scholar]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Feature | Accuracy Rate (%) | Matching Time (ms) |
|---|---|---|
| SIDR (ours) | 99.02 | 2.5 |
| CBW [36] | 89.78 | 4400.0 |
| TCD [37] | 89.90 | 1990.0 |
| SC [11] | 89.12 | 1507.0 |
| IDSC [15] | 95.13 | 1830.0 |
| DIR [16] | 86.60 | 12.3 |
| FD-CCD [7] | 75.85 | 3.3 |
| Feature | Bulls-Eye-Test Score (%) | Matching Time (ms) |
|---|---|---|
| SIDR (ours) | 89.46 | 2.8 |
| CBW [36] | 85.20 | 4650.0 |
| TCD [37] | 86.96 | 2040.0 |
| SC [11] | 68.59 | 1060.0 |
| IDSC [15] | 85.34 | 1023.0 |
| DIR [16] | 77.69 | 12.3 |
| FD-CCD [7] | 68.94 | 3.6 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Z.; Guo, B.; Li, C. Interior Distance Ratio to a Regular Shape for Fast Shape Recognition. Symmetry 2022, 14, 2040. https://doi.org/10.3390/sym14102040
Li Z, Guo B, Li C. Interior Distance Ratio to a Regular Shape for Fast Shape Recognition. Symmetry. 2022; 14(10):2040. https://doi.org/10.3390/sym14102040
Chicago/Turabian StyleLi, Zekun, Baolong Guo, and Cheng Li. 2022. "Interior Distance Ratio to a Regular Shape for Fast Shape Recognition" Symmetry 14, no. 10: 2040. https://doi.org/10.3390/sym14102040