
Study of Transmission Dynamics of Streptococcus suis Infection Mathematical Model between Pig and Human under ABC Fractional Order Derivative

Abstract
:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
2. Fractional Calculus
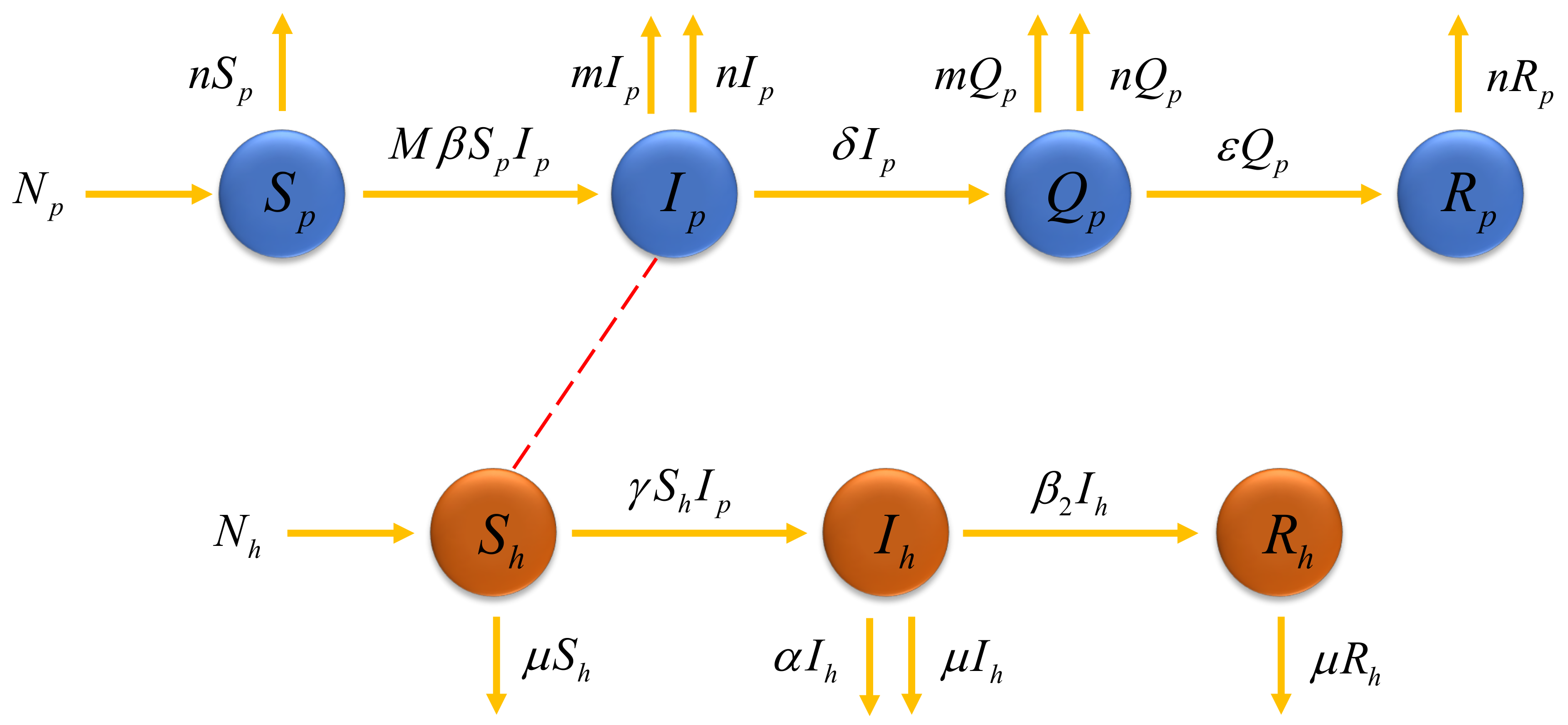
3. Formulation of the Mathematical Model
4. Model Analysis
4.1. The Invariant Region
4.2. Equilibria
4.3. Basic Reproduction Number
4.4. The Stability of Disease-Free Equilibrium
4.5. The Stability of Endemic Equilibrium
5. The Fractional Order Model with the Atangana–Baleanu–Caputo Operator
6. Numerical Examples and Discussion
6.1. Approximation Technique
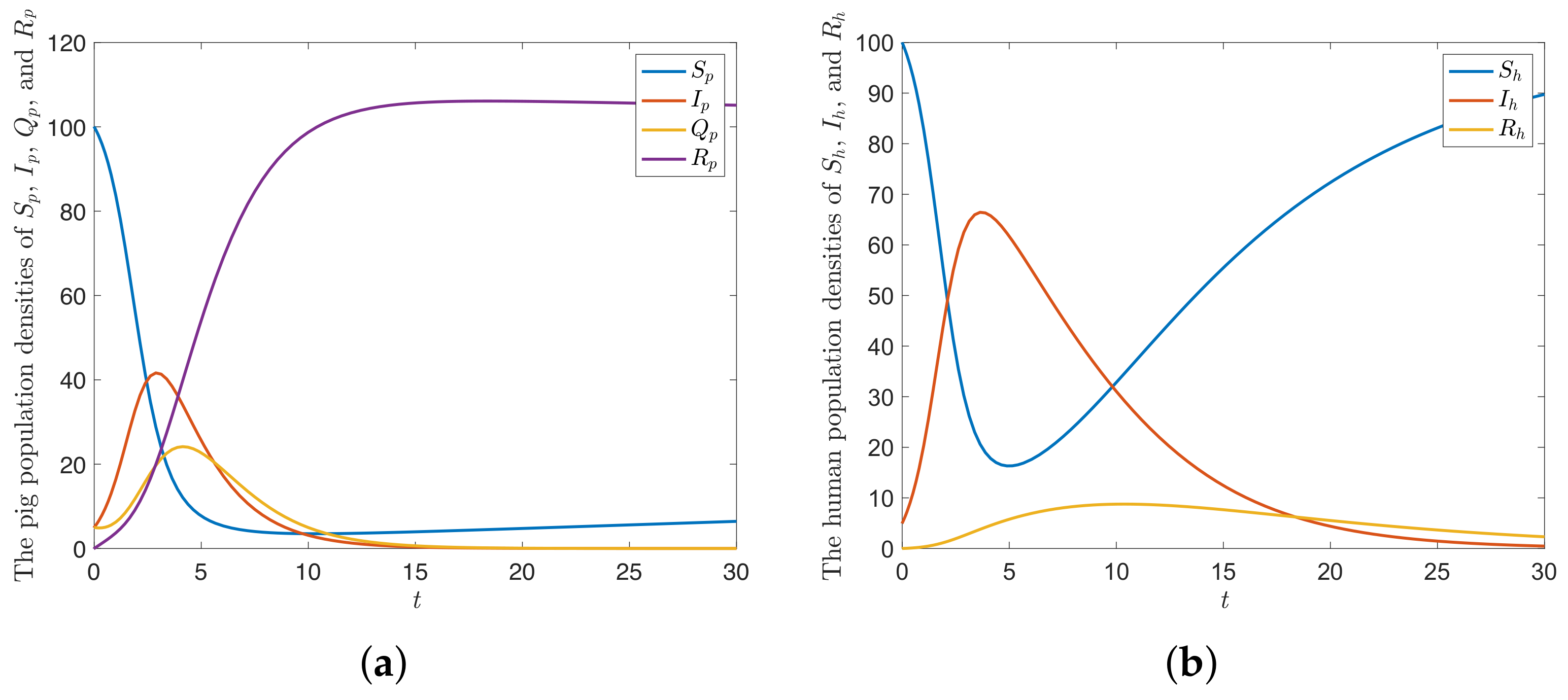
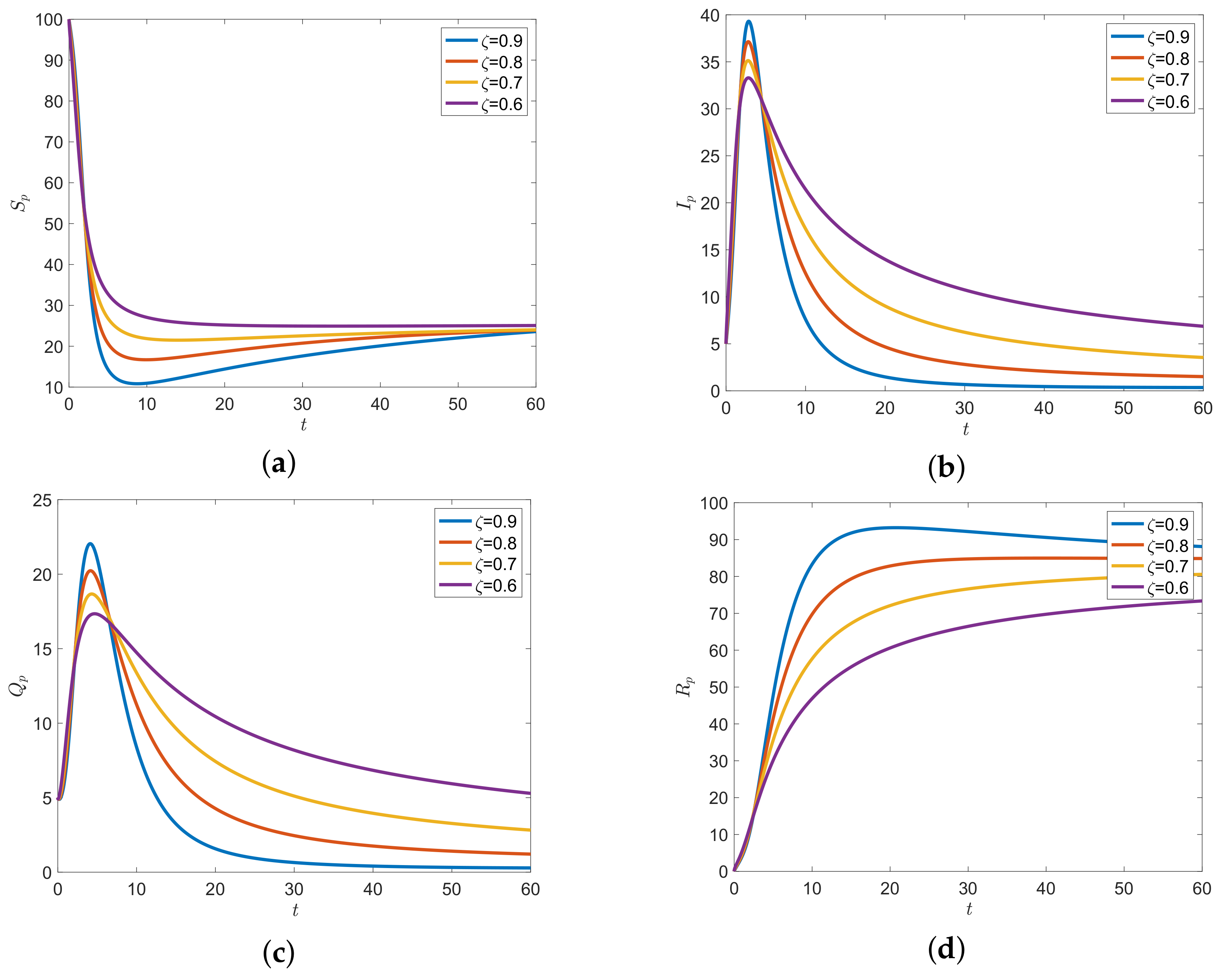
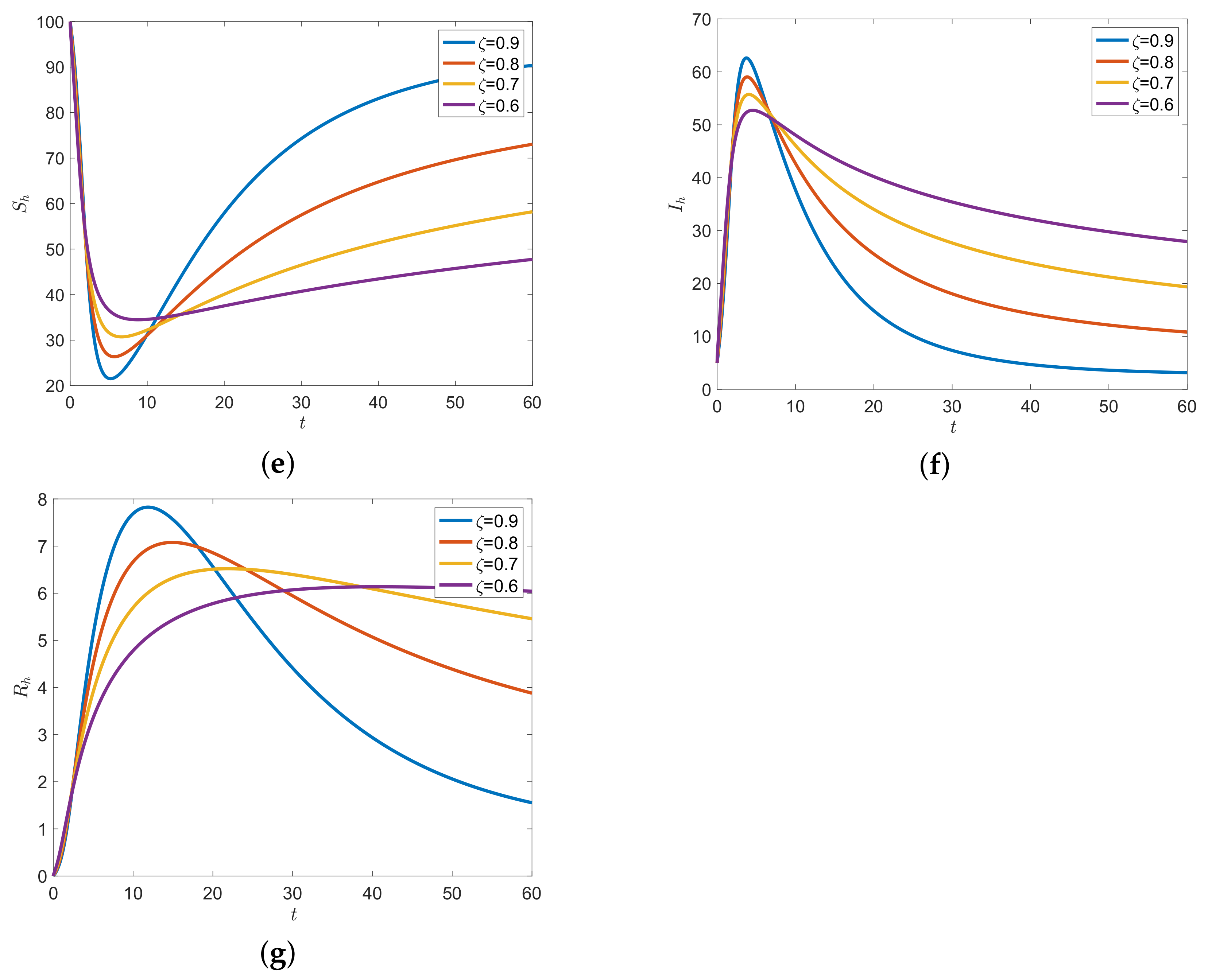
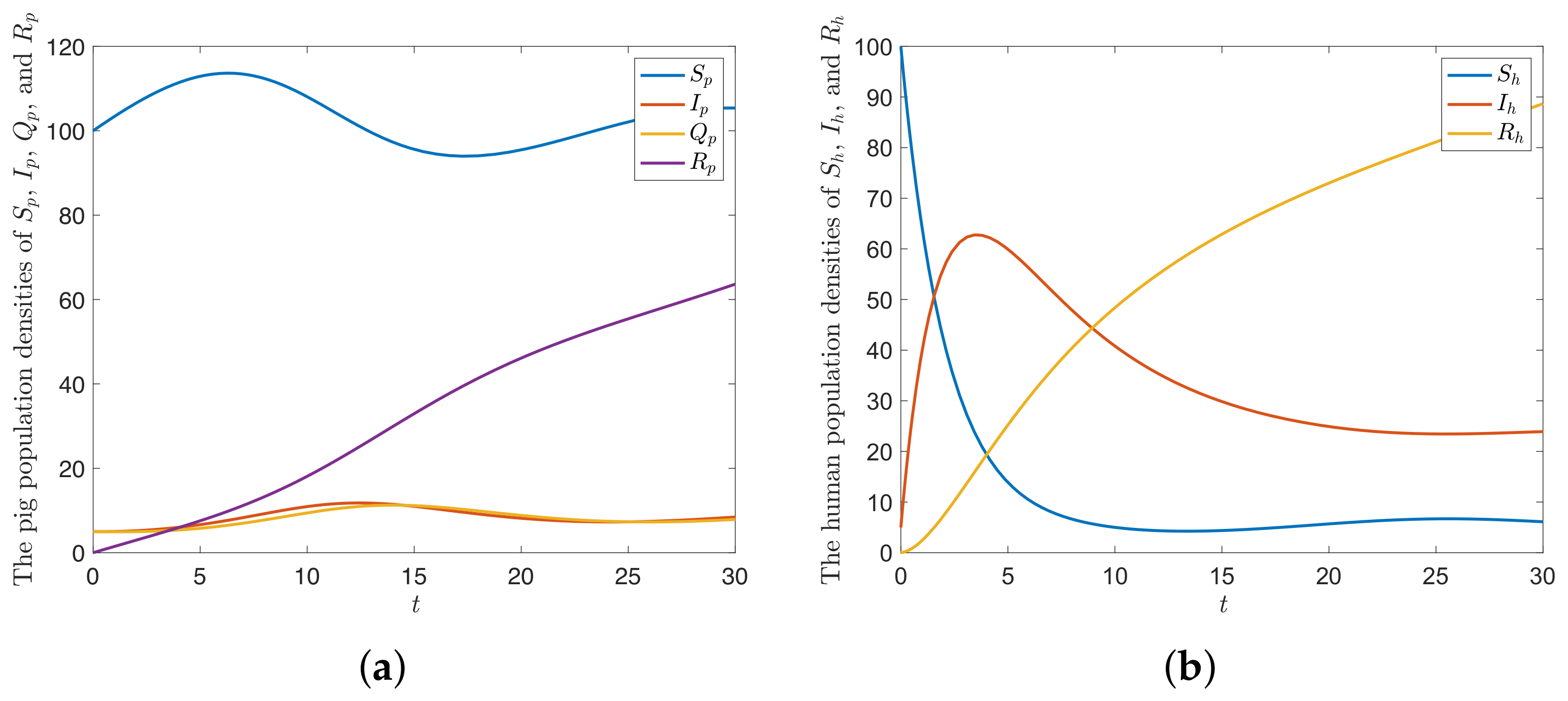
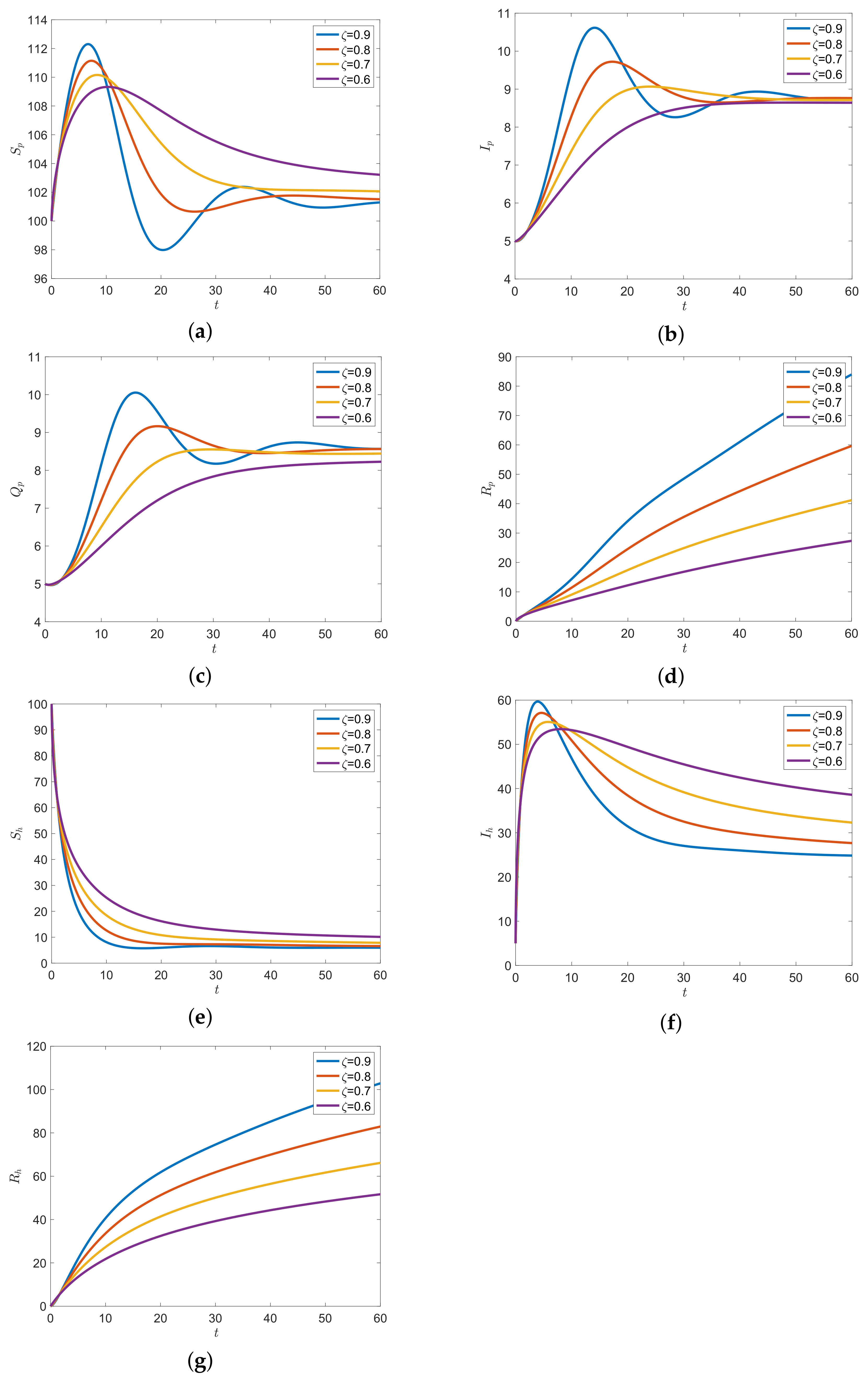
6.2. Numerical Examples
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Jones, K.E.; Patel, N.G.; Levy, M.A.; Storeygard, A.; Balk, D.; Gittleman, J.L.; Daszak, P. Global trends in emerging infectious diseases. Nature 2008, 451, 990–993. [Google Scholar] [CrossRef] [PubMed]
- Li, F.; Du, L. MERS Coronavirus: An Emerging Zoonotic Virus. Viruses 2019, 11, 663. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Mackenzie, J.S.; Smith, D.W. COVID-19: A novel zoonotic disease caused by a coronavirus from China: What we know and what we don’t. Microbiol. Aust. 2020, 41, 45–50. [Google Scholar] [CrossRef]
- Gottschalk, M.; Xu, J.; Calzas, C.; Segura, M. Streptococcus suis: A new emerging or an old neglected zoonotic pathogen? Future Microbiol. 2010, 5, 371–391. [Google Scholar] [CrossRef] [PubMed]
- Goyette-Desjardins, G.; Auger, J.; Xu, J.; Segura, M.; Gottschalk, M. Streptococcus suis, an important pig pathogen and emerging zoonotic agent—An update on the worldwide distribution based on serotyping and sequence typing. Emerg. Microbes Infect. 2014, 3, e45. [Google Scholar] [CrossRef] [PubMed]
- Dutkiewicz, J.; Sroka, J.; Zajac, V.; Wasinski, B.; Cisak, E.; Sawczyn, A.; Kloc, A.; Wojcik-Fatla, A. Streptococcus suis: A re-emerging pathogen associated with occupational exposure to pigs or pork products. Part I—Epidemiology. Ann. Agric. Environ. Med. 2017, 24, 683–695. [Google Scholar] [CrossRef] [PubMed]
- Feng, Y.; Zhang, H.; Wu, Z.; Wang, S.; Cao, M.; Hu, D.; Wang, C. Streptococcus suis infection. Virulence 2014, 5, 477–497. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gajdacs, M.; Nemeth, A.; Knausz, M.; Barrak, I.; Stajer, A.; Mestyan, G.; Melegh, S.; Nyul, A.; Toth, A.; Agoston, Z.; et al. Streptococcus suis: An Underestimated Emerging Pathogen in Hungary? Microorganisms 2020, 8, 1292. [Google Scholar] [CrossRef]
- Lun, Z.R.; Wang, Q.P.; Chen, X.G.; Li, A.X.; Zhu, X.Q. Streptococcus suis: An emerging zoonotic pathogen. Lancet Infect. Dis. 2007, 7, 201–209. [Google Scholar] [CrossRef]
- Huh, H.J.; Park, K.J.; Jang, J.H.; Lee, M.; Lee, J.H.; Ahn, Y.H.; Kang, C.I.; Ki, C.S.; Lee, N.Y. Streptococcus suis meningitis with bilateral sensorineural hearing loss. Korean J. Lab. Med. 2011, 31, 205–211. [Google Scholar] [CrossRef]
- Hughes, J.M.; Wilson, M.E.; Wertheim, H.F.L.; Nghia, H.D.T.; Taylor, W.; Schultsz, C. Streptococcus suis: An Emerging Human Pathogen. Clin. Infect. Dis. 2009, 48, 617–625. [Google Scholar] [CrossRef] [Green Version]
- Dekker, N.; Bouma, A.; Daemen, I.; Klinkenberg, D.; van Leengoed, L.; Wagenaar, J.A.; Stegeman, A. Effect of Spatial Separation of Pigs on Spread of Streptococcus suis Serotype 9. PLoS ONE 2013, 8, e61339. [Google Scholar] [CrossRef] [Green Version]
- Hlebowicz, M.; Jakubowski, P.; Smiatacz, T. Streptococcus suis Meningitis: Epidemiology, Clinical Presentation and Treatment. Vector Borne Zoonotic Dis. 2019, 19, 557–562. [Google Scholar] [CrossRef]
- Li, Z.; Xu, M.; Hua, X. Endogenous endophthalmitis caused by Streptococcus suis infection: A case report. BMC Ophthalmol. 2022, 22, 165. [Google Scholar] [CrossRef]
- Okura, M.; Osaki, M.; Nomoto, R.; Arai, S.; Osawa, R.; Sekizaki, T.; Takamatsu, D. Current Taxonomical Situation of Streptococcus suis. Pathogens 2016, 5, 45. [Google Scholar] [CrossRef] [Green Version]
- Giang, E.; Hetman, B.M.; Sargeant, J.M.; Poljak, Z.; Greer, A.L. Examining the Effect of Host Recruitment Rates on the Transmission of Streptococcus suis in Nursery Swine Populations. Pathogens 2020, 9, 174. [Google Scholar] [CrossRef] [Green Version]
- Oishi, K.; Dejsirilert, S.; Puangpatra, P.; Sripakdee, S.; Chumla, K.; Boonkerd, N.; Polwichai, P.; Tanimura, S.; Takeuchi, D.; Nakayama, T.; et al. Genotypic Profile of Streptococcus suis Serotype 2 and Clinical Features of Infection in Humans, Thailand. Emerg. Infect. Dis. 2011, 17, 835–842. [Google Scholar] [CrossRef]
- Zhu, Y.; Zhu, F.; Bo, L.; Fang, Y.; Shan, X. A rare case of meningitis and septicemia caused by Streptococcus suis in a woman without a history of live pig contact or eating raw pork. Braz. J. Microbiol. 2021, 52, 2007–2012. [Google Scholar] [CrossRef]
- Takeuchi, D.; Kerdsin, A.; Pienpringam, A.; Loetthong, P.; Samerchea, S.; Luangsuk, P.; Khamisara, K.; Wongwan, N.; Areeratana, P.; Chiranairadul, P.; et al. Population-Based Study of Streptococcus suis Infection in Humans in Phayao Province in Northern Thailand. PLoS ONE 2012, 7, e31265. [Google Scholar] [CrossRef] [Green Version]
- Takeuchi, D.; Kerdsin, A.; Akeda, Y.; Chiranairadul, P.; Loetthong, P.; Tanburawong, N.; Areeratana, P.; Puangmali, P.; Khamisara, K.; Pinyo, W.; et al. Impact of a Food Safety Campaign on Streptococcus suis Infection in Humans in Thailand. Am. Soc. Trop. Med. Hyg. 2017, 96, 1370–1377. [Google Scholar] [CrossRef]
- Jiang, F.; Guo, J.; Cheng, C.; Gu, B. Human infection caused by Streptococcus suis serotype 2 in China: Report of two cases and epidemic distribution based on sequence type. BMC Infect. Dis. 2020, 20, 223. [Google Scholar] [CrossRef] [Green Version]
- Dattner, I.; Huppert, A. Modern statistical tools for inference and prediction of infectious diseases using mathematical models. Stat. Methods Med. Res. 2018, 27, 1927–1929. [Google Scholar] [CrossRef] [Green Version]
- Adekola, H.A.; Adekunle, I.A.; Egberongbe, H.O.; Onitilo, S.A.; Abdullahi, I.N. Mathematical modeling for infectious viral disease: The COVID-19 perspective. J. Public Aff. 2020, 20, e2306. [Google Scholar] [CrossRef]
- Prathumwan, D.; Trachoo, K.; Chaiya, I. Mathematical Modeling for Prediction Dynamics of the Coronavirus Disease 2019 (COVID-19) Pandemic, Quarantine Control Measures. Symmetry 2020, 12, 1404. [Google Scholar] [CrossRef]
- Chamnan, A.; Pongsumpun, P.; Tang, I.M.; Wongvanich, N. Local and Global Stability Analysis of Dengue Disease with Vaccination and Optimal Control. Symmetry 2021, 13, 1917. [Google Scholar] [CrossRef]
- Fatmawati; Jan, R.; Khan, M.A.; Khan, Y.; Ullah, S. A new model of dengue fever in terms of fractional derivative. Math. Biosci. Eng. 2020, 17, 5267–5287. [Google Scholar] [CrossRef]
- Huang, Y.; Li, J.; Zhang, J.; Jin, Z. Dynamical analysis of the spread of African swine fever with the live pig price in China. Math. Biosci. Eng. 2021, 18, 8123–8148. [Google Scholar] [CrossRef]
- Carvalho, S.A.; da Silva, S.O.; Charret, I.d.C. Mathematical modeling of dengue epidemic: Control methods and vaccination strategies. Theory Biosci. 2019, 138, 223–239. [Google Scholar] [CrossRef] [Green Version]
- Kumar, P.; Baleanu, D.; Erturk, V.S.; Inc, M.; Govindaraj, V. A delayed plant disease model with Caputo fractional derivatives. Adv. Contin. Discret. Model. 2022, 2022, 11. [Google Scholar] [CrossRef]
- Peter, O.J.; Shaikh, A.S.; Ibrahim, M.O.; Nisar, K.S.; Baleanu, D.; Khan, I.; Abioye, A.I. Analysis and Dynamics of Fractional Order Mathematical Model of COVID-19 in Nigeria Using Atangana-Baleanu Operator. Comput. Mater. Contin. 2021, 66, 1823–1848. [Google Scholar] [CrossRef]
- Shen, C.; Li, M.; Zhang, W.; Yi, Y.; Wang, Y.; Hou, Q.; Huang, B.; Lu, C. Modeling Transmission Dynamics of Streptococcus suis with Stage Structure and Sensitivity Analysis. Discret. Dyn. Nat. Soc. 2014, 2014, 432602. [Google Scholar] [CrossRef] [Green Version]
- Podlubny, I. Fractional Differential Equations. Mathematics in Science and Engineering; Academic Press: San Diego, CA, USA, 1999. [Google Scholar]
- Atangana, A.; Baleanu, D. New fractional derivatives with non-local and non-singular kernel: Theory and application to heat transfer model. Therm. Sci. 2016, 20, 763–769. [Google Scholar] [CrossRef] [Green Version]
- Lipsitch, M.; Nowak, M.A.; Ebert, D.; May, R.M. The population dynamics of vertically and horizontally transmitted parasites. Proc. R. Soc. Lond. Ser. B Biol. Sci. 1995, 260, 321–327. [Google Scholar] [CrossRef]
- Naresh, R.; Tripathi, A.; Omar, S. Modelling the spread of AIDS epidemic with vertical transmission. Appl. Math. Comput. 2006, 178, 262–272. [Google Scholar] [CrossRef]
- van den Driessche, P.; Watmough, J. Reproduction numbers and sub-threshold endemic equilibria for compartmental models of disease transmission. Math. Biosci. 2002, 180, 29–48. [Google Scholar] [CrossRef]
- Diekmann, O.; Heesterbeek, J.A.P.; Roberts, M.G. The construction of next-generation matrices for compartmental epidemic models. J. R. Soc. Interface 2010, 7, 873–885. [Google Scholar] [CrossRef] [Green Version]
- Gupta, P.K.; Dutta, A. A mathematical model on HIV/AIDS with fusion effect: Analysis and homotopy solution. Eur. Phys. J. Plus 2019, 134, 265. [Google Scholar] [CrossRef]
- Goodrich, C.S. Existence of a positive solution to a class of fractional differential equations. Appl. Math. Lett. 2010, 23, 1050–1055. [Google Scholar] [CrossRef] [Green Version]
- Sinan, M.; Ahmad, H.; Ahmad, Z.; Baili, J.; Murtaza, S.; Aiyashi, M.; Botmart, T. Fractional mathematical modeling of malaria disease with treatment & insecticides. Results Phys. 2022, 34, 105220. [Google Scholar] [CrossRef]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Prathumwan, D.; Chaiya, I.; Trachoo, K. Study of Transmission Dynamics of Streptococcus suis Infection Mathematical Model between Pig and Human under ABC Fractional Order Derivative. Symmetry 2022, 14, 2112. https://doi.org/10.3390/sym14102112
Prathumwan D, Chaiya I, Trachoo K. Study of Transmission Dynamics of Streptococcus suis Infection Mathematical Model between Pig and Human under ABC Fractional Order Derivative. Symmetry. 2022; 14(10):2112. https://doi.org/10.3390/sym14102112
Chicago/Turabian StylePrathumwan, Din, Inthira Chaiya, and Kamonchat Trachoo. 2022. "Study of Transmission Dynamics of Streptococcus suis Infection Mathematical Model between Pig and Human under ABC Fractional Order Derivative" Symmetry 14, no. 10: 2112. https://doi.org/10.3390/sym14102112