
A Motion Planning Method for Automated Vehicles in Dynamic Traffic Scenarios


Abstract
:1. Introduction
1.1. Related Work
1.2. Contribution
2. Methodology
2.1. Problem Description and Basic Assumptions
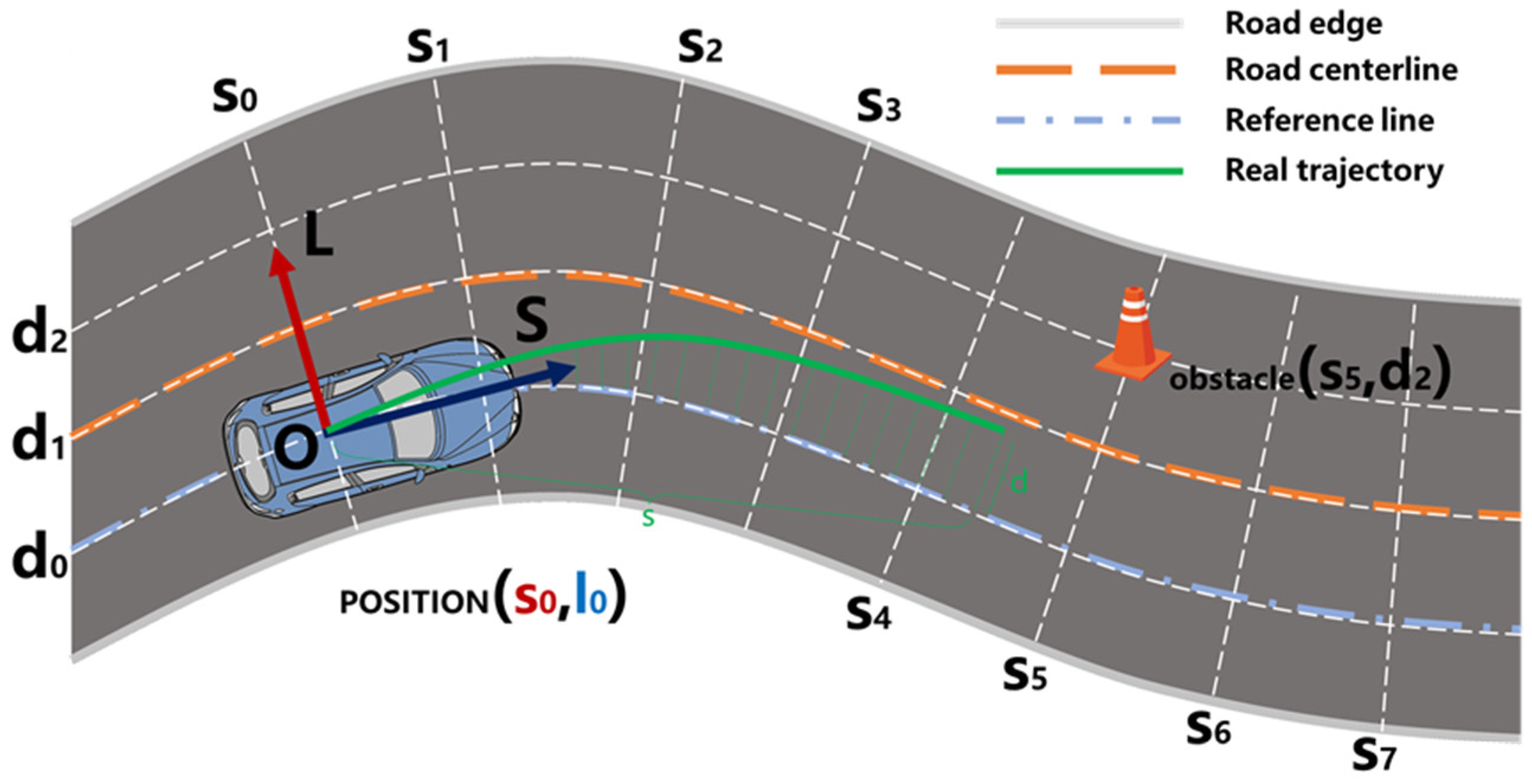
2.2. Coordinates Transformation and the Reference Line Generation
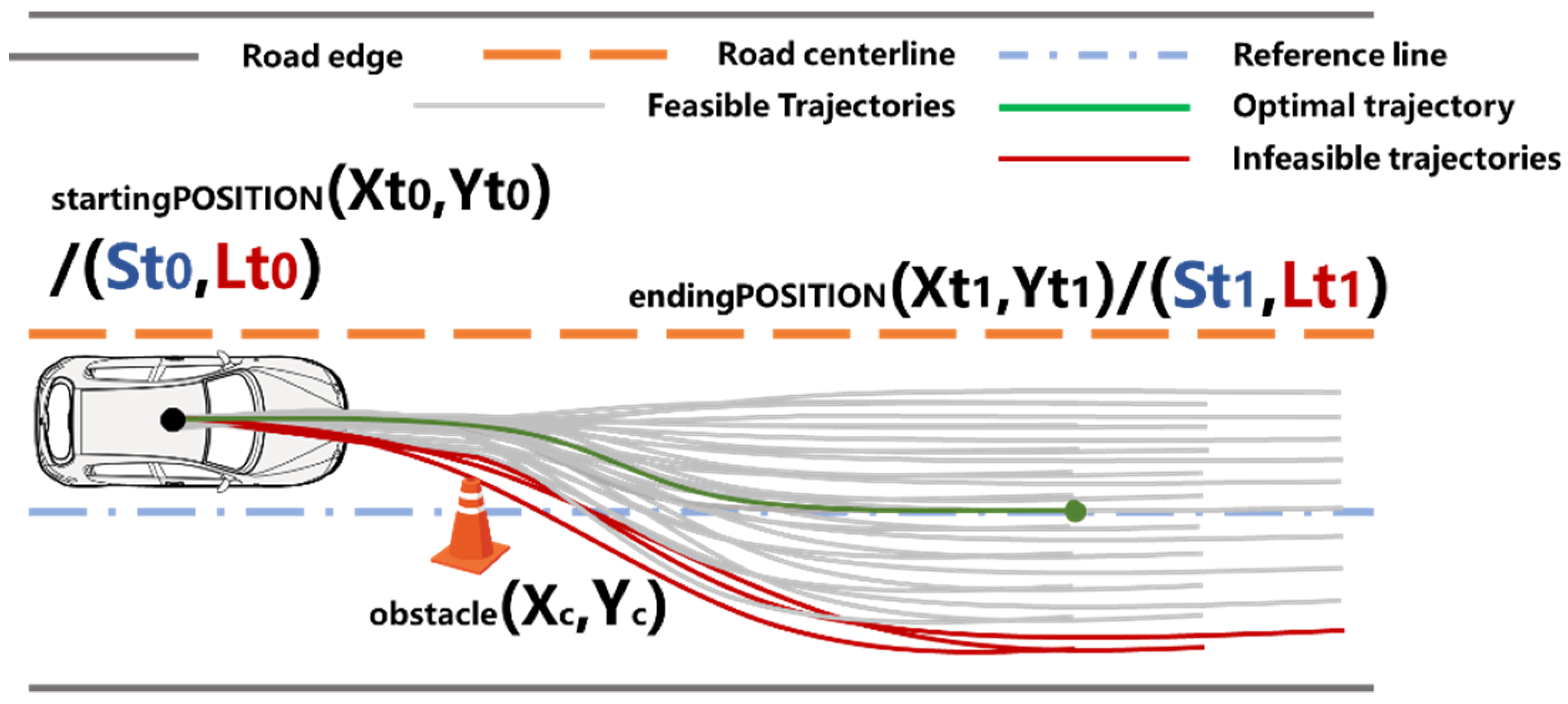
2.3. Trajectories Generation
2.4. Optimal Trajectories Searching Based on the Cost Function
2.5. Final Path Selection
3. Improved Optimal Trajectory Searching Process Based on SAA
4. Numerical Experiments
4.1. Scenario and Parameter Settings
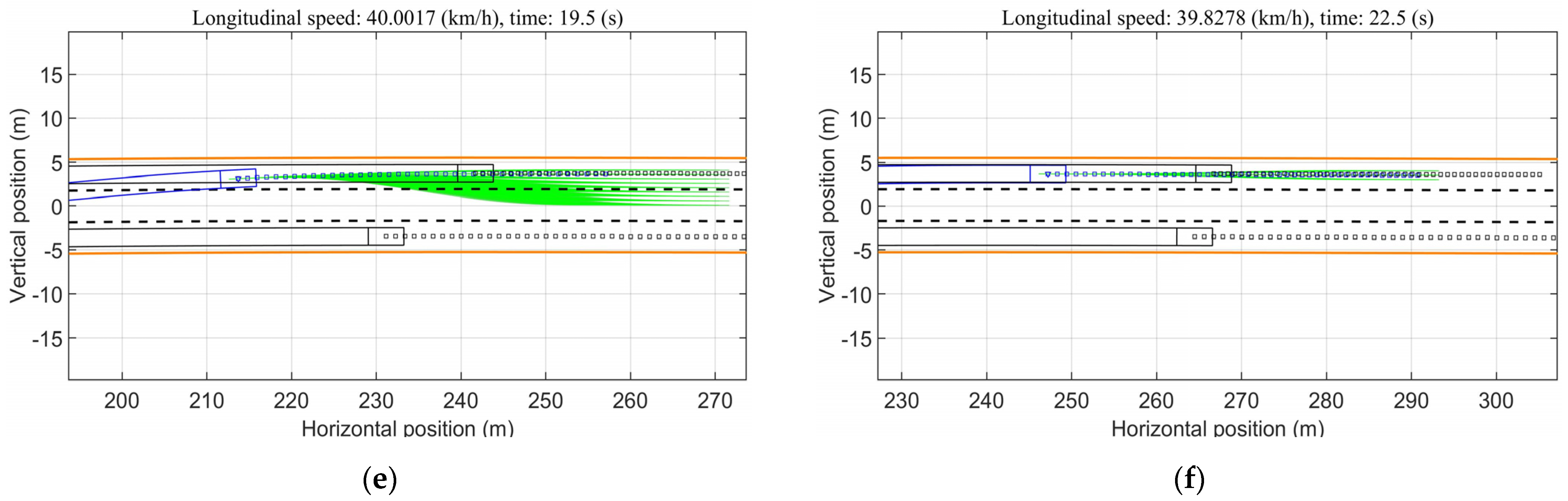
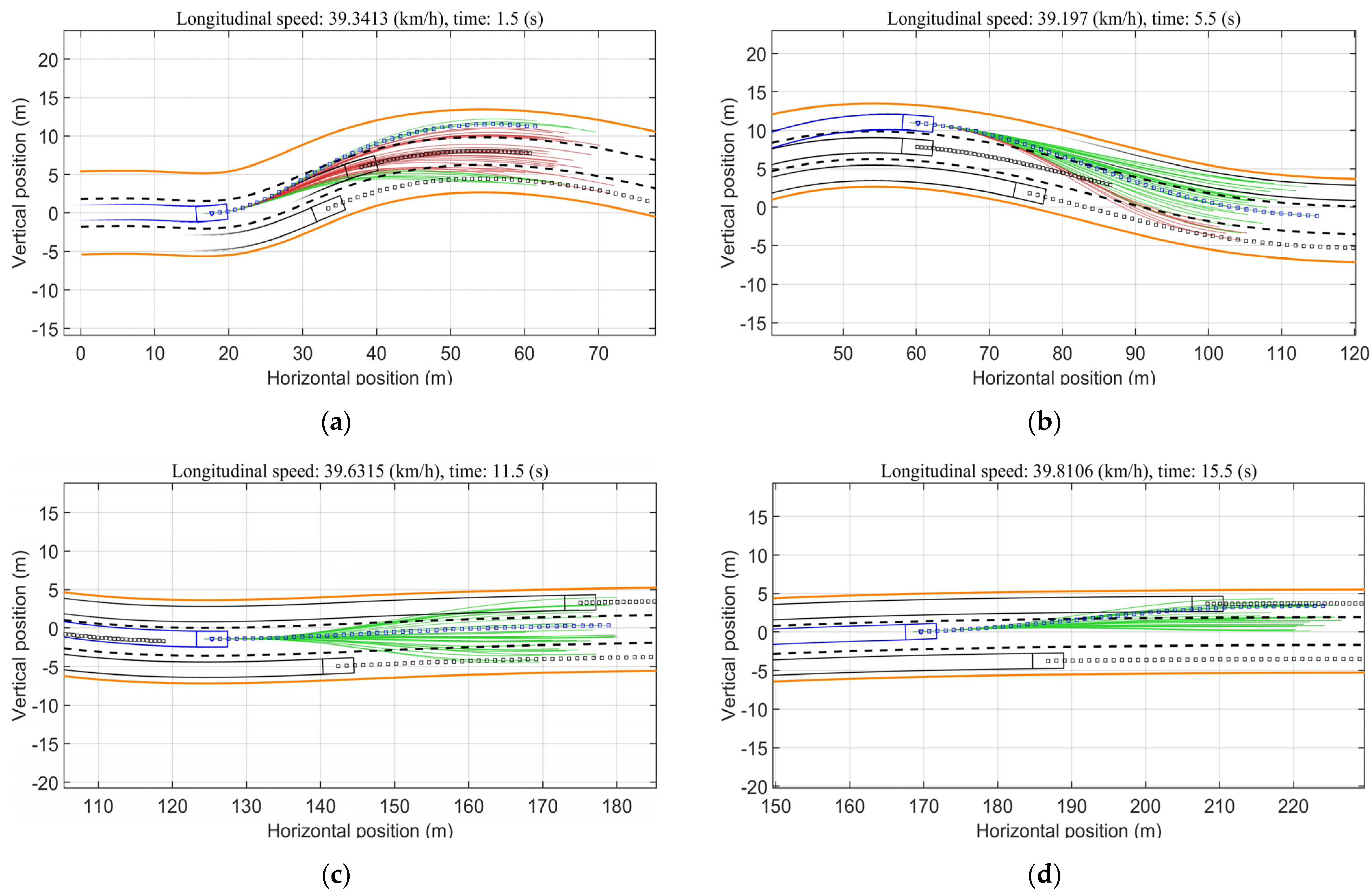
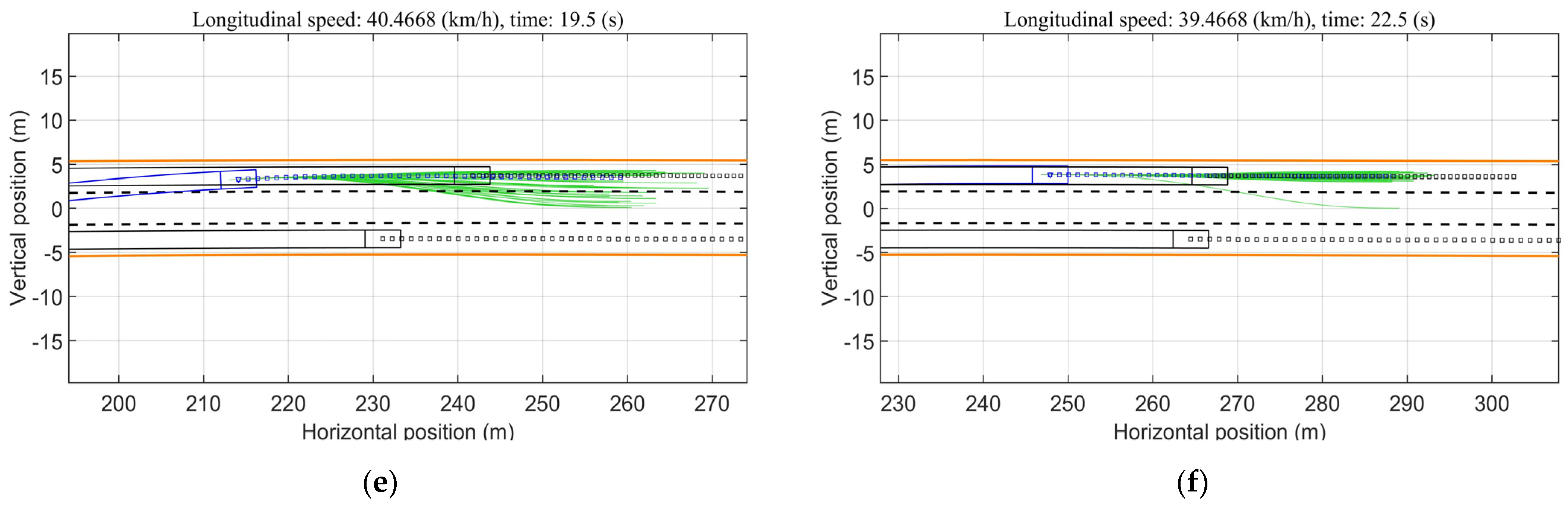
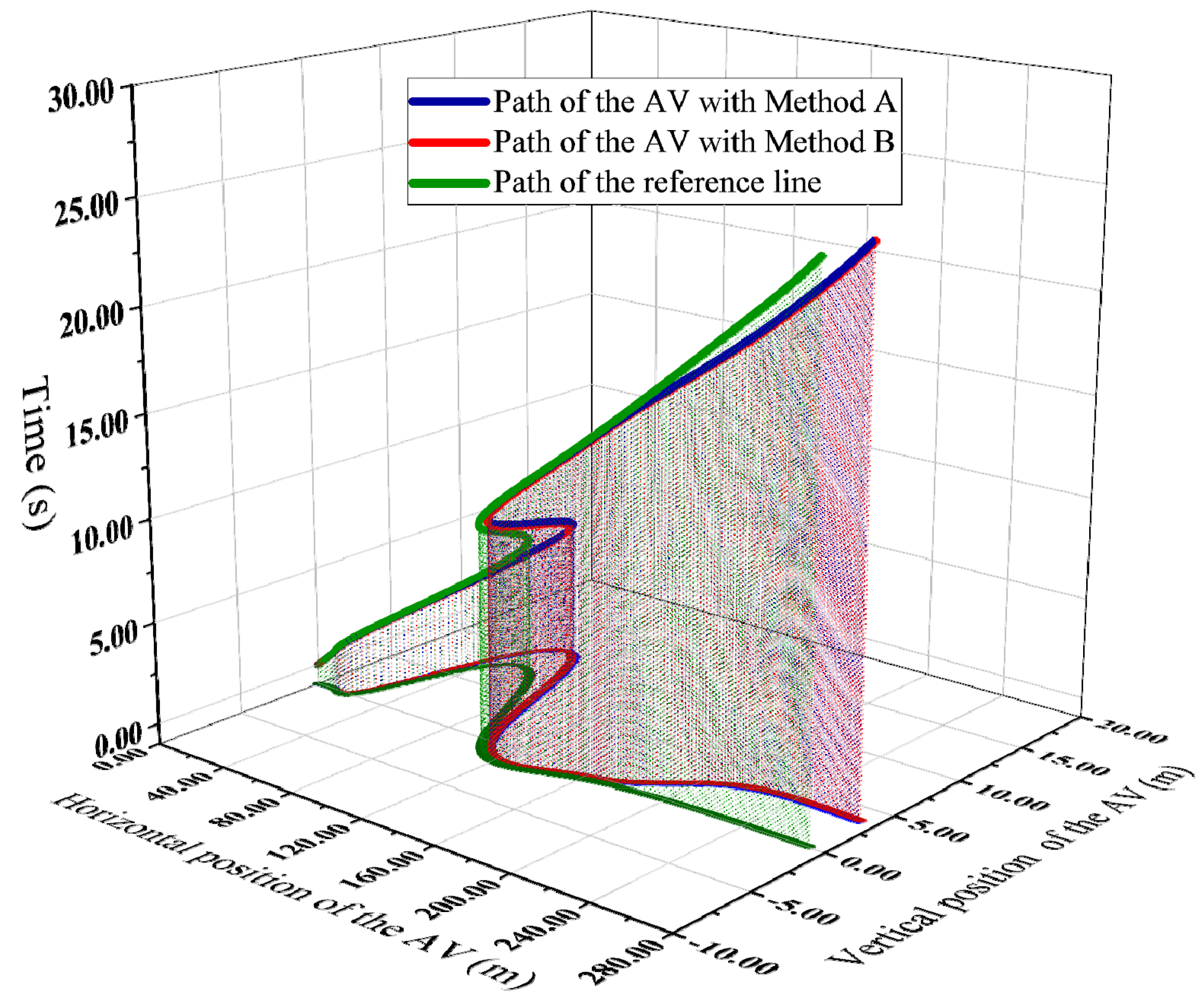
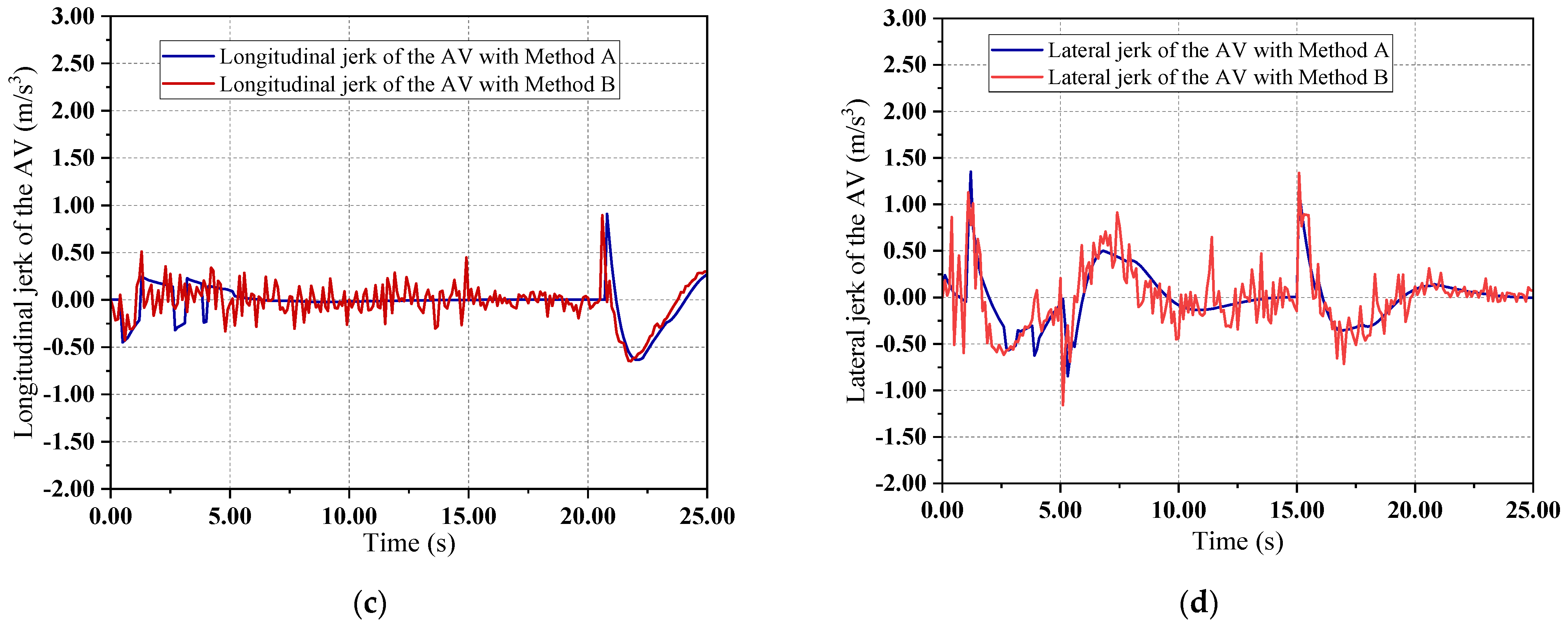
4.2. Performance of the AV with Methods A and B
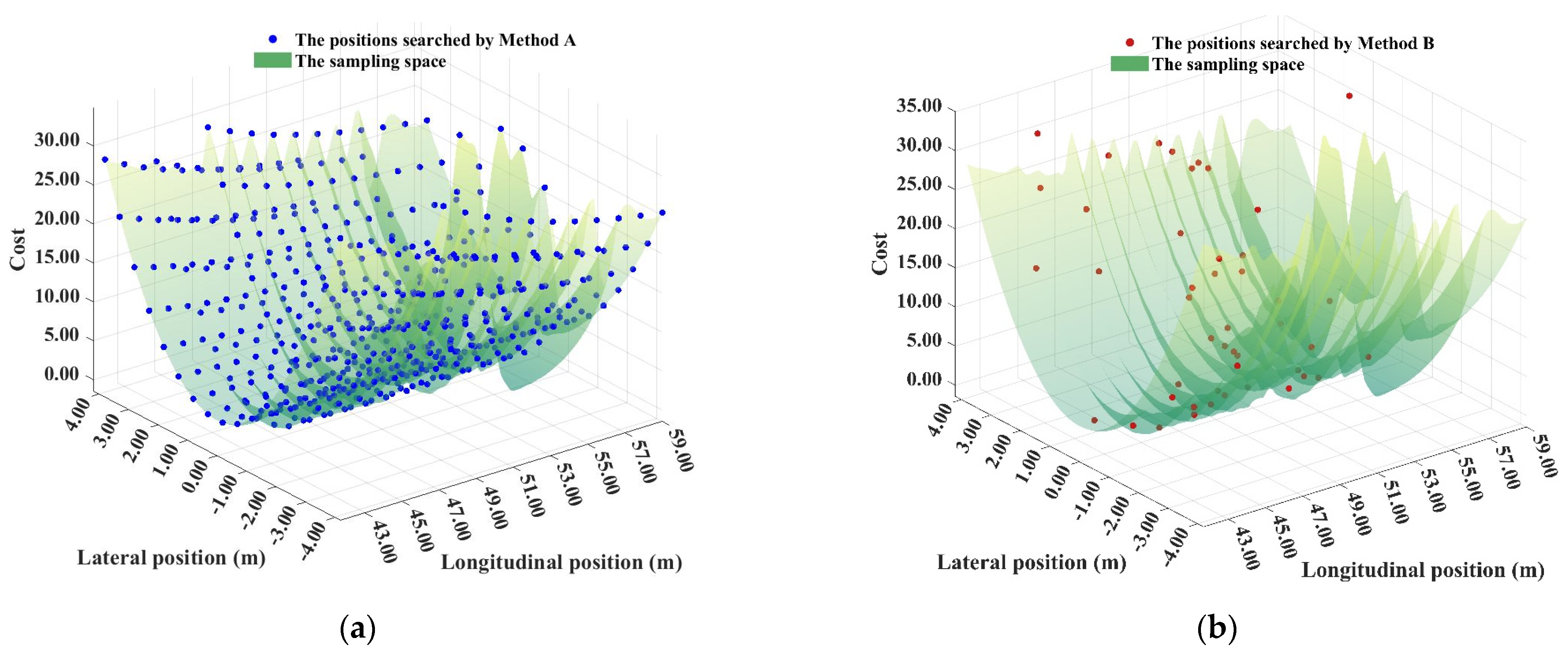
4.3. Comparison of the Efficiency of Methods A and B
5. Conclusions
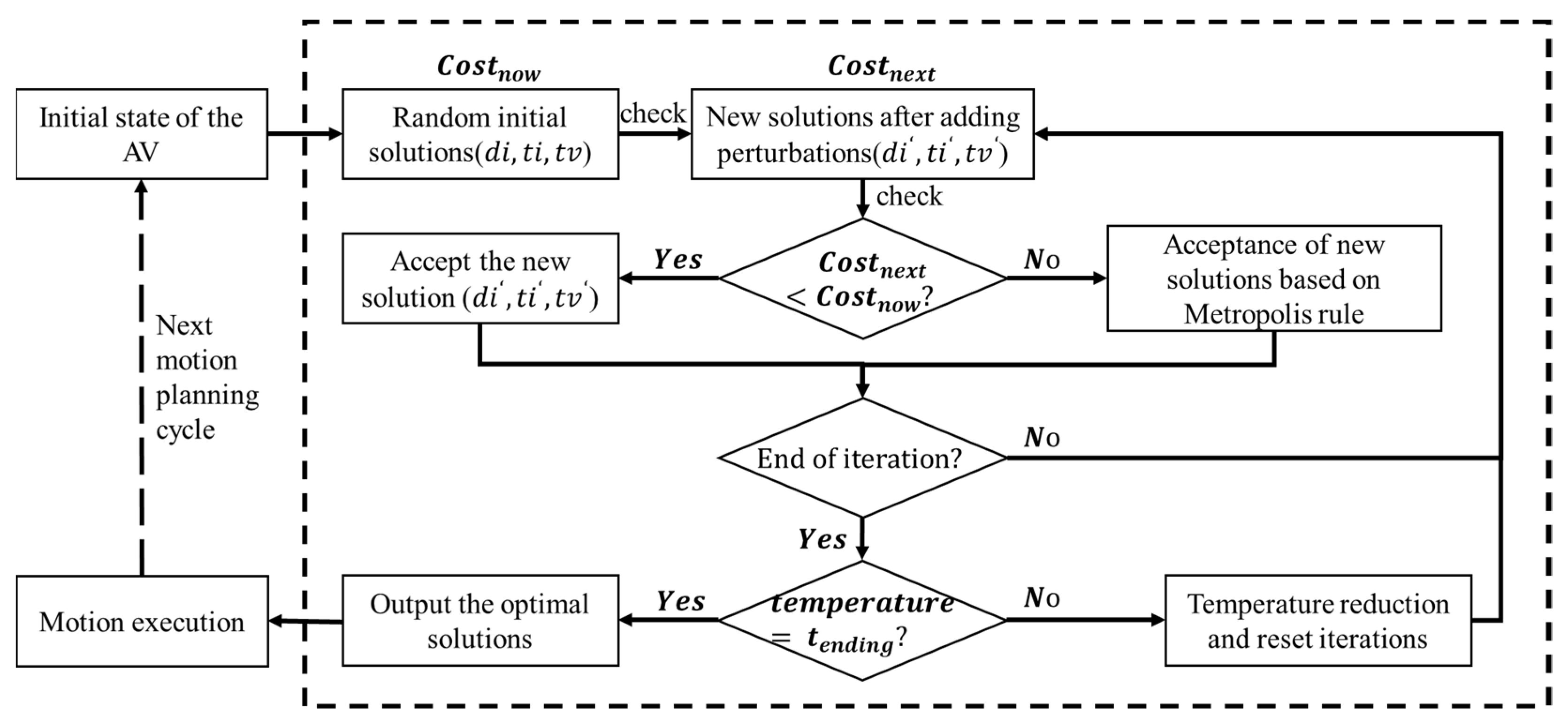
- We propose a motion planning method applicable to AVs in dynamic traffic scenarios. The trajectories are solved by a polynomial in the Frenet frame, and the costs of the optional trajectories are quantified as a cost function that includes cost terms for safety, comfort, efficiency, etc. An improved optimal trajectory searching method applying SAA is proposed. The experimental results in the simulated dynamic traffic scenarios show that the method proposed in this paper is feasible and efficient.
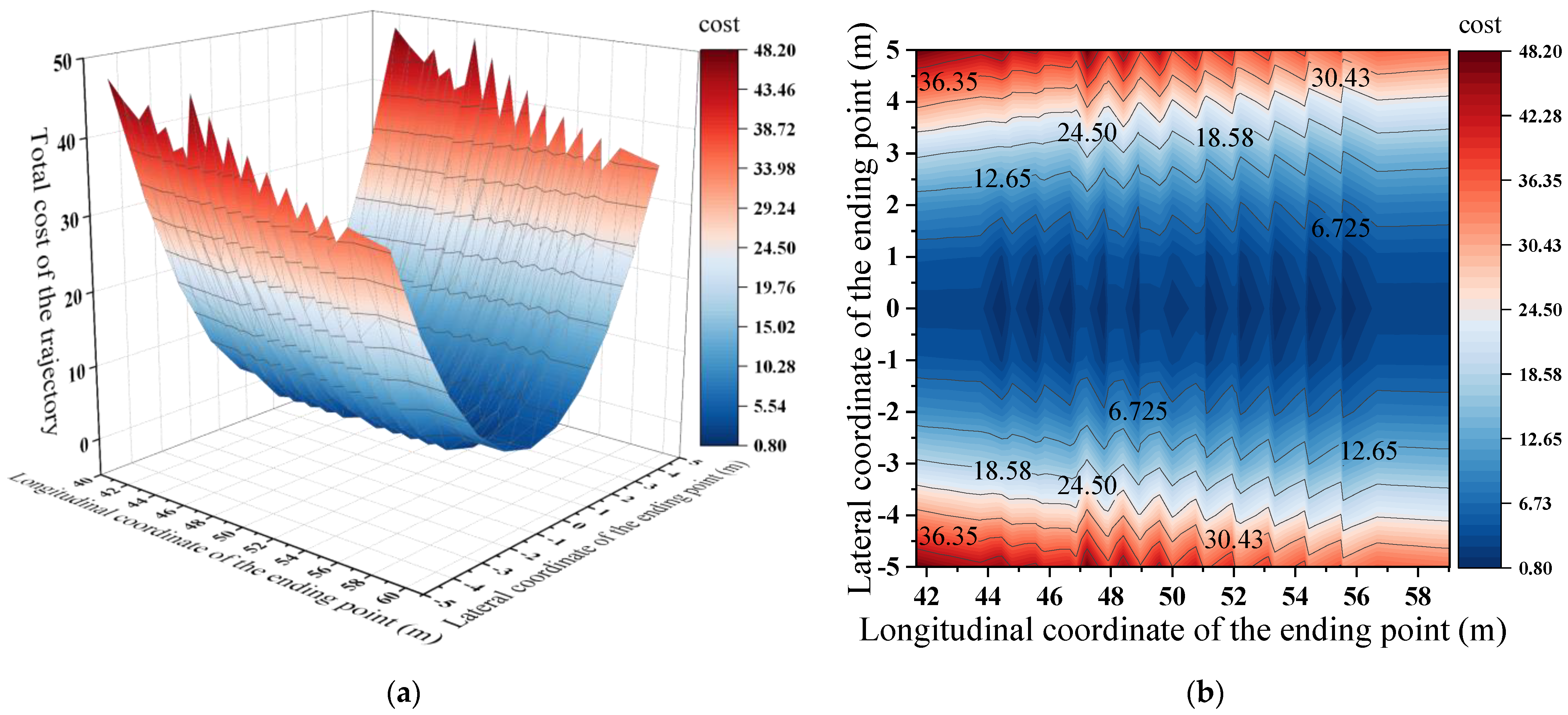
- The process of searching for the least costly trajectory is visualized, and the axisymmetric regularity of the costs about the reference line is summarized. Based on this, the cost function is modified to make the performance of the AV more consistent with the driving behaviors of human drivers.
- Compared with the optimal trajectories searching method that traverses the sampling space, the proposed method in this paper saves 70.23% of the searching time without affecting the performance of the AV. In addition, the searching time of the proposed method shows good robustness to variations in the sampling space. This is conducive to the improvement of the motion planning adaptability of AVs in a variety of road scenarios.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Dijkstra, E.W. A Note on Two Problems in Connexion with Graphs. Numer. Math. 1959, 1, 269–271. [Google Scholar] [CrossRef] [Green Version]
- Hart, P.; Nilsson, N.; Raphael, B. A Formal Basis for the Heuristic Determination of Minimum Cost Paths. IEEE Trans. Syst. Sci. Cyber. 1968, 4, 100–107. [Google Scholar] [CrossRef]
- Ferguson, D.; Stentz, A. Using Interpolation to Improve Path Planning: The Field D* Algorithm. J. Field Robot. 2006, 23, 79–101. [Google Scholar] [CrossRef] [Green Version]
- Kelly, A.; Nagy, B. Reactive Nonholonomic Trajectory Generation via Parametric Optimal Control. Int. J. Robot. Res. 2003, 22, 583–601. [Google Scholar] [CrossRef]
- Claussmann, L.; Revilloud, M.; Gruyer, D.; Glaser, S. A Review of Motion Planning for Highway Autonomous Driving. IEEE Trans. Intell. Transport. Syst. 2020, 21, 1826–1848. [Google Scholar] [CrossRef] [Green Version]
- Dolgov, D.; Thrun, S.; Montemerlo, M.; Diebel, J. Path Planning for Autonomous Vehicles in Unknown Semi-Structured Environments. Int. J. Robot. Res. 2010, 29, 485–501. [Google Scholar] [CrossRef]
- Dolgov, D.; Thrun, S.; Montemerlo, M.; Diebel, J. Practical Search Techniques in Path Planning for Autonomous Driving. J. Field Robot. 2008, 25, 569–597. [Google Scholar]
- Montemerlo, M.; Becker, J.; Bhat, S.; Dahlkamp, H.; Dolgov, D.; Ettinger, S.; Haehnel, D.; Hilden, T.; Hoffmann, G.; Huhnke, B.; et al. Junior: The Stanford Entry in the Urban Challenge. J. Field Robot. 2008, 25, 569–597. [Google Scholar] [CrossRef] [Green Version]
- Karaman, S.; Frazzoli, E. Optimal Kinodynamic Motion Planning Using Incremental Sampling-Based Methods. In Proceedings of the 49th IEEE Conference on Decision and Control (CDC), Atlanta, GA, USA, 15–17 December 2010; IEEE: Atlanta, GA, USA, 2010; pp. 7681–7687. [Google Scholar]
- Kuwata, Y.; Karaman, S.; Teo, J.; Frazzoli, E.; How, J.P.; Fiore, G. Real-Time Motion Planning With Applications to Autonomous Urban Driving. IEEE Trans. Contr. Syst. Technol. 2009, 17, 1105–1118. [Google Scholar] [CrossRef]
- Leonard, J.; How, J.; Teller, S.; Berger, M.; Campbell, S.; Fiore, G.; Fletcher, L.; Frazzoli, E.; Huang, A.; Karaman, S.; et al. A Perception-Driven Autonomous Urban Vehicle. J. Field Robot. 2008, 25, 727–774. [Google Scholar] [CrossRef] [Green Version]
- Khatib, O. Real-Time Obstacle Avoidance for Manipulators and Mobile Robots. In Autonomous Robot Vehicles; Cox, I.J., Wilfong, G.T., Eds.; Springer: New York, NY, USA, 1986; pp. 396–404. ISBN 978-1-4613-8999-6. [Google Scholar]
- Wu, Z.; Su, W.; Li, J. Multi-Robot Path Planning Based on Improved Artificial Potential Field and B-Spline Curve Optimization. In Proceedings of the 2019 Chinese Control Conference (CCC), Guangzhou, China, 27–30 July 2019; pp. 4691–4696. [Google Scholar]
- Xu, T.; Zhou, H.; Tan, S.; Li, Z.; Ju, X.; Peng, Y. Mechanical Arm Obstacle Avoidance Path Planning Based on Improved Artificial Potential Field Method. Ind. Robot. 2021. ahead-of-print. [Google Scholar] [CrossRef]
- Cho, J.-H.; Pae, D.-S.; Lim, M.-T.; Kang, T.-K. A Real-Time Obstacle Avoidance Method for Autonomous Vehicles Using an Obstacle-Dependent Gaussian Potential Field. J. Adv. Transp. 2018, 2018, 1–15. [Google Scholar] [CrossRef] [Green Version]
- Pae, D.-S.; Kim, G.-H.; Kang, T.-K.; Lim, M.-T. Path Planning Based on Obstacle-Dependent Gaussian Model Predictive Control for Autonomous Driving. Appl. Sci. 2021, 11, 3703. [Google Scholar] [CrossRef]
- Chen, L.; Qin, D.; Xu, X.; Cai, Y.; Xie, J. A Path and Velocity Planning Method for Lane Changing Collision Avoidance of Intelligent Vehicle Based on Cubic 3-D Bezier Curve. Adv. Eng. Softw. 2019, 132, 65–73. [Google Scholar] [CrossRef]
- Zhou, B.; Wang, Y.; Yu, G.; Wu, X. A Lane-Change Trajectory Model from Drivers’ Vision View. Transp. Res. Part C Emerg. Technol. 2017, 85, 609–627. [Google Scholar] [CrossRef]
- Du, M.; Mei, T.; Liang, H.; Chen, J.; Huang, R.; Zhao, P. Drivers’ Visual Behavior-Guided RRT Motion Planner for Autonomous On-Road Driving. Sensors 2016, 16, 102. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhan, W.; Chen, J.; Chan, C.-Y.; Liu, C.; Tomizuka, M. Spatially-Partitioned Environmental Representation and Planning Architecture for on-Road Autonomous Driving. In Proceedings of the 2017 IEEE Intelligent Vehicles Symposium (IV), Los Angeles, CA, USA, 11–17 June 2017; pp. 632–639. [Google Scholar]
- Arslan, O.; Berntorp, K.; Tsiotras, P. Sampling-Based Algorithms for Optimal Motion Planning Using Closed-Loop Prediction. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 4991–4996. [Google Scholar]
- Werling, M.; Ziegler, J.; Kammel, S.; Thrun, S. Optimal Trajectory Generation for Dynamic Street Scenarios in a Frenét Frame. In Proceedings of the 2010 IEEE International Conference on Robotics and Automation, Anchorage, AK, USA, 3–8 May 2010; pp. 987–993. [Google Scholar]
- Werling, M.; Kammel, S.; Ziegler, J.; Gröll, L. Optimal Trajectories for Time-Critical Street Scenarios Using Discretized Terminal Manifolds. Int. J. Robot. Res. 2012, 31, 346–359. [Google Scholar] [CrossRef]
- Katrakazas, C.; Quddus, M.; Chen, W.-H.; Deka, L. Real-Time Motion Planning Methods for Autonomous on-Road Driving: State-of-the-Art and Future Research Directions. Transp. Res. Part C Emerg. Technol. 2015, 60, 416–442. [Google Scholar] [CrossRef]
- Gonzalez, D.; Perez, J.; Milanes, V.; Nashashibi, F. A Review of Motion Planning Techniques for Automated Vehicles. IEEE Trans. Intell. Transport. Syst. 2016, 17, 1135–1145. [Google Scholar] [CrossRef]
- Xu, W.; Wei, J.; Dolan, J.M.; Zhao, H.; Zha, H. A Real-Time Motion Planner with Trajectory Optimization for Autonomous Vehicles. In Proceedings of the 2012 IEEE International Conference on Robotics and Automation, St Paul, MN, USA, 14–18 May 2012; pp. 2061–2067. [Google Scholar]
- Ziegler, J.; Bender, P.; Dang, T.; Stiller, C. Trajectory Planning for Bertha—A Local, Continuous Method. In Proceedings of the 2014 IEEE Intelligent Vehicles Symposium Proceedings, Dearborn, MI, USA, 8–11 June 2014; pp. 450–457. [Google Scholar]
- Zhou, J.; He, R.; Wang, Y.; Jiang, S.; Zhu, Z.; Hu, J.; Miao, J.; Luo, Q. DL-IAPS and PJSO: A Path/Speed Decoupled Trajectory Optimization and Its Application in Autonomous Driving. arXiv 2009, arXiv:11135. [Google Scholar]
- Hu, X.; Chen, L.; Tang, B.; Cao, D.; He, H. Dynamic Path Planning for Autonomous Driving on Various Roads with Avoidance of Static and Moving Obstacles. Mech. Syst. Signal Processing 2018, 100, 482–500. [Google Scholar] [CrossRef]
- Li, H.; Yu, G.; Zhou, B.; Li, D.; Wang, Z. Trajectory Planning of Autonomous Driving Vehicles Based on Road-Vehicle Fusion. In Proceedings of the CICTP 2020, American Society of Civil Engineers, (Conference Cancelled), Xi’an, China, 9 December 2020; pp. 816–828. [Google Scholar]
- Jiang, Y.; Jin, X.; Xiong, Y.; Liu, Z. A Dynamic Motion Planning Framework for Autonomous Driving in Urban Environments. In Proceedings of the 2020 39th Chinese Control Conference (CCC), Shenyang, China, 27–29 July 2020; pp. 5429–5435. [Google Scholar]
- Lim, W.; Lee, S.; Sunwoo, M.; Jo, K. Hybrid Trajectory Planning for Autonomous Driving in On-Road Dynamic Scenarios. IEEE Trans. Intell. Transport. Syst. 2021, 22, 341–355. [Google Scholar] [CrossRef]
- Moghadam, M.; Elkaim, G.H. An Autonomous Driving Framework for Long-Term Decision-Making and Short-Term Trajectory Planning on Frenet Space. In Proceedings of the 2021 IEEE 17th International Conference on Automation Science and Engineering (CASE), Lyon, France, 23–27 August 2021; pp. 1745–1750. [Google Scholar]
- Moghadam, M.; Alizadeh, A.; Tekin, E.; Elkaim, G.H. A Deep Reinforcement Learning Approach for Long-Term Short-Term Planning on Frenet Frame. In Proceedings of the 2021 IEEE 17th International Conference on Automation Science and Engineering (CASE), Lyon, France, 23–27 August 2021; pp. 1751–1756. [Google Scholar]
- Peng, B.; Yu, D.; Zhou, H.; Xiao, X.; Fang, Y. A Platoon Control Strategy for Autonomous Vehicles Based on Sliding-Mode Control Theory. IEEE Access 2020, 8, 81776–81788. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Cost | Weight |
|---|---|
| Vehicle Parameters | Value | Unit |
|---|---|---|
| Vehicle width (for all vehicles) | 2.0 | m |
| Vehicle length (for all vehicles) | 4.2 | m |
| Collision radius of the vehicle (for all vehicles) | 3.0 | m |
| The initial position of the AV | (0, 0) | m |
| The initial position of the vehicles driven by human drivers | (30.0, 0.0), (80.0, 3.6),(15.0, −3.6) | m |
| The initial speed of the AV | 40 | km/h |
| The speed of the vehicles driven by human drivers | 20, 30, 40 | km/h |
| Sampling Space Parameters | Method A | Method B |
|---|---|---|
| Lateral position sampling range (m) | [−4.2, 4.2] | [−4.2, 4.2] |
| Predicted time sampling range (s) | [4, 5] | [4, 5] |
| Target speed sampling range (km/h) | [35, 45] | [35, 45] |
| Lateral position sampling interval (m) | 1 | 0.1 |
| Predicted time sampling interval (s) | 0.1 | 0.1 |
| Target speed sampling interval (km/h) | 5 | 5 |
| Planning period length (s) | 0.1 | 0.1 |
| Parameters of SAA | Values |
|---|---|
| Initial temperature (°C) | 100 |
| Length of Markov chain | 5 |
| Rate of temperature decrease | 0.9 |
| The temperature at which the algorithm stops (°C) | 3 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Peng, B.; Yu, D.; Zhou, H.; Xiao, X.; Xie, C. A Motion Planning Method for Automated Vehicles in Dynamic Traffic Scenarios. Symmetry 2022, 14, 208. https://doi.org/10.3390/sym14020208
Peng B, Yu D, Zhou H, Xiao X, Xie C. A Motion Planning Method for Automated Vehicles in Dynamic Traffic Scenarios. Symmetry. 2022; 14(2):208. https://doi.org/10.3390/sym14020208
Chicago/Turabian StylePeng, Bo, Dexin Yu, Huxing Zhou, Xue Xiao, and Chen Xie. 2022. "A Motion Planning Method for Automated Vehicles in Dynamic Traffic Scenarios" Symmetry 14, no. 2: 208. https://doi.org/10.3390/sym14020208
APA StylePeng, B., Yu, D., Zhou, H., Xiao, X., & Xie, C. (2022). A Motion Planning Method for Automated Vehicles in Dynamic Traffic Scenarios. Symmetry, 14(2), 208. https://doi.org/10.3390/sym14020208