
A Novel Anti-Saturation Model-Free Adaptive Control Algorithm and Its Application in the Electric Vehicle Braking Energy Recovery System

Abstract
:1. Introduction
2. Design of Braking Energy Optimization Controller and Dynamic Analysis of Braking Process
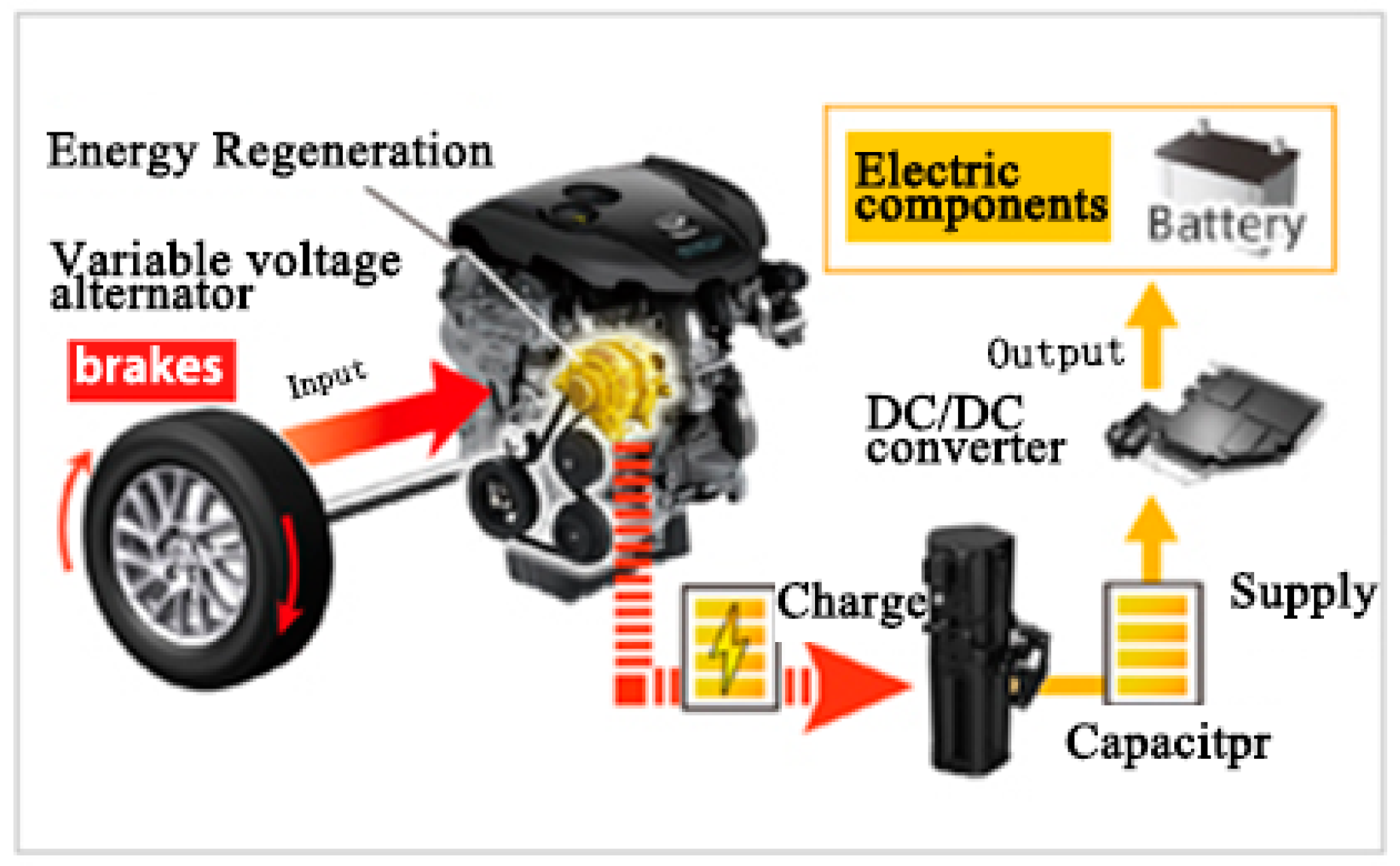
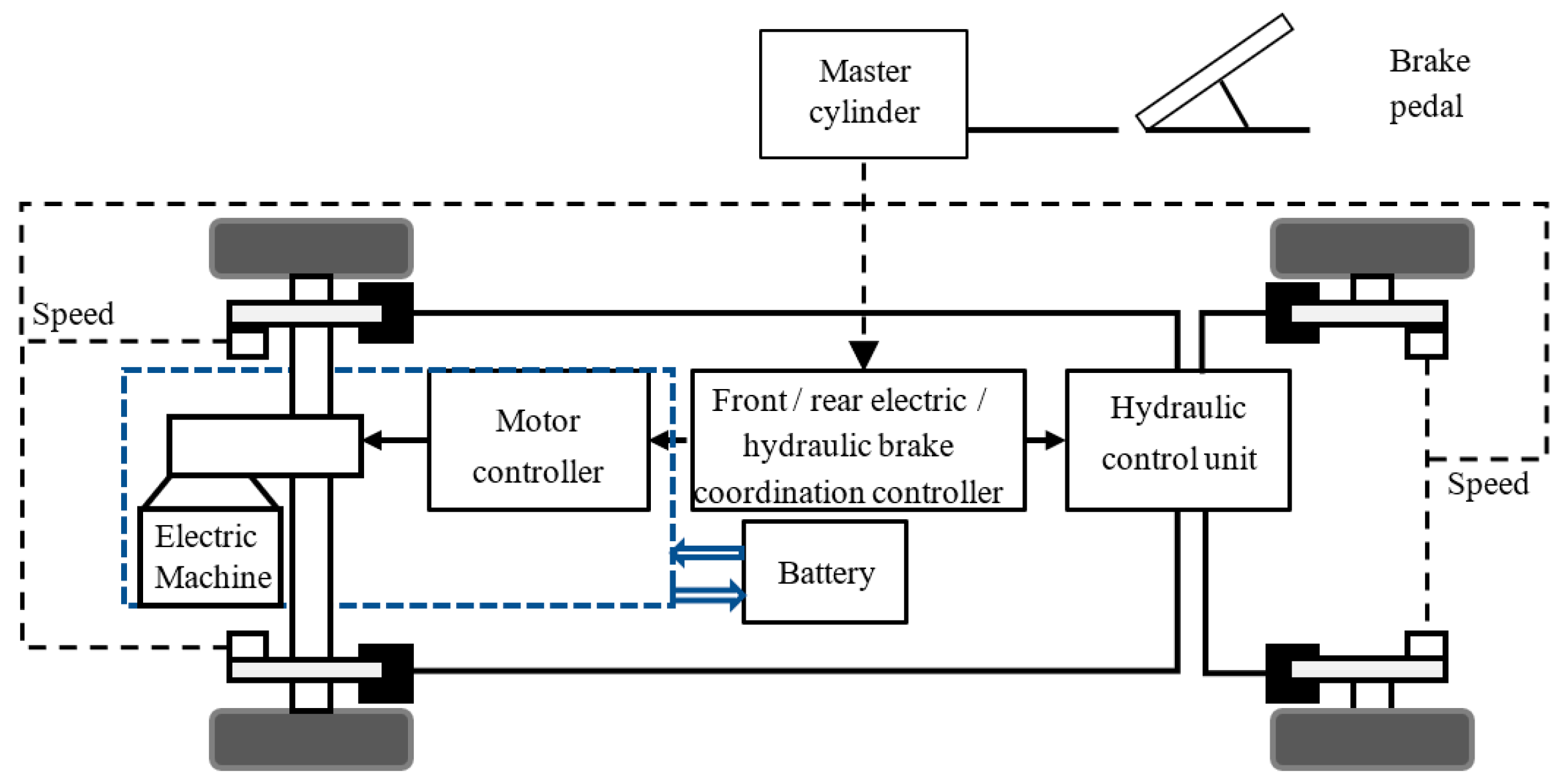
2.1. Dynamics Description of Regenerative Braking System
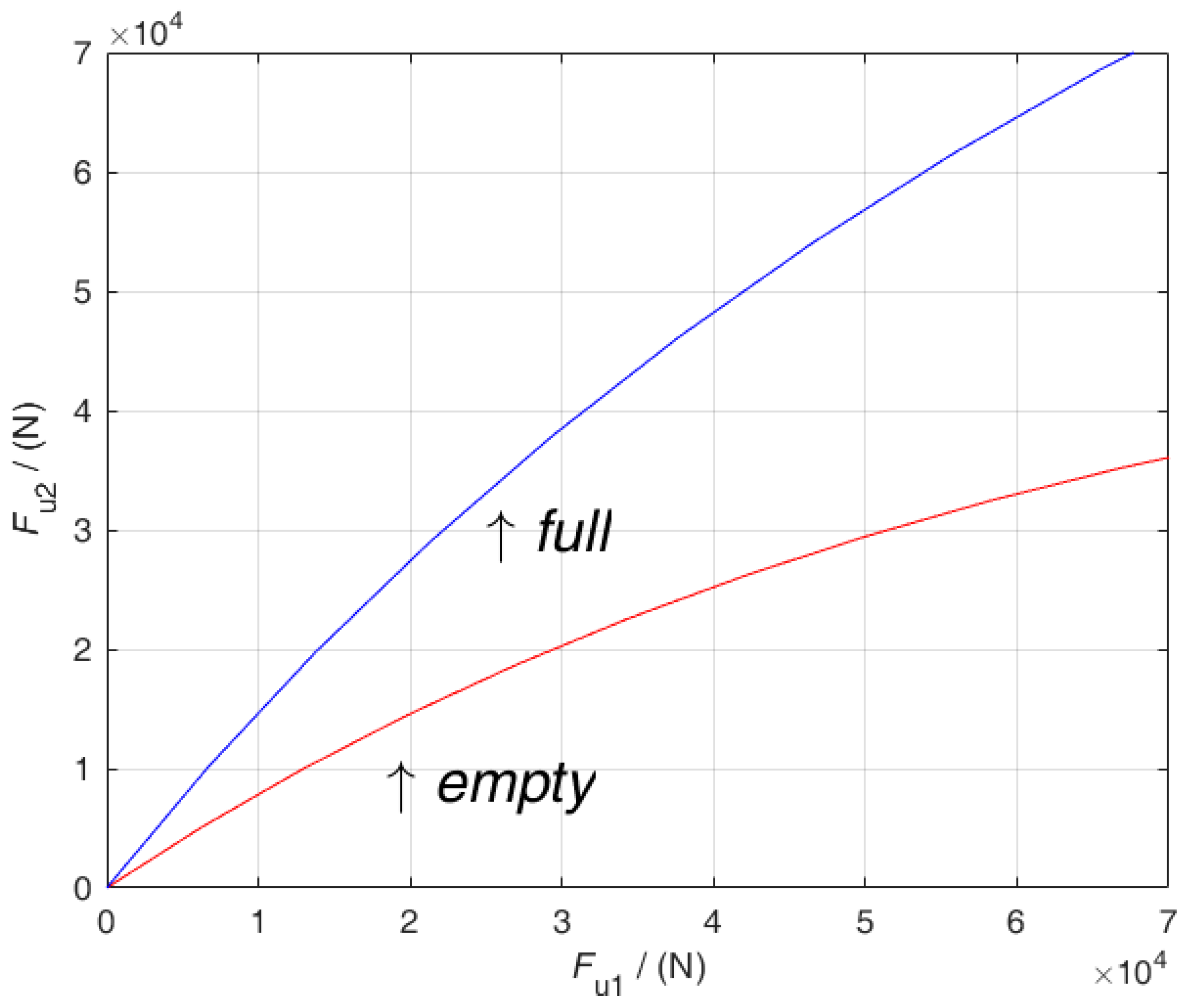
2.2. Forces during Braking and Braking Force Distribution
- represents the normal reaction force of the ground facing the front wheel (N);
- G represents the force of gravity on the vehicle (N);
- b represents the distance from the vehicle centroid to the centerline of the rear axle (mm);
- m is the vehicle mass (kg);
- h is the height of the vehicle centroid (mm); and
- dv/dt indicates the deceleration of the vehicle ().
- represents the normal reaction force of the ground facing the rear wheel (N) and
- a represents the distance from the vehicle centroid to the centerline of the front axle (mm).
- g represents the acceleration of gravity.
- represents the road adhesion coefficient.
- represents the braking force of the front wheel brake and
- represents the braking force of the rear wheel brake.
3. Design of the AS-MFAC Controller
3.1. Dynamic Linearization
3.2. Design of the Controller
4. Experimental Simulation
4.1. Numerical Simulation Comparison
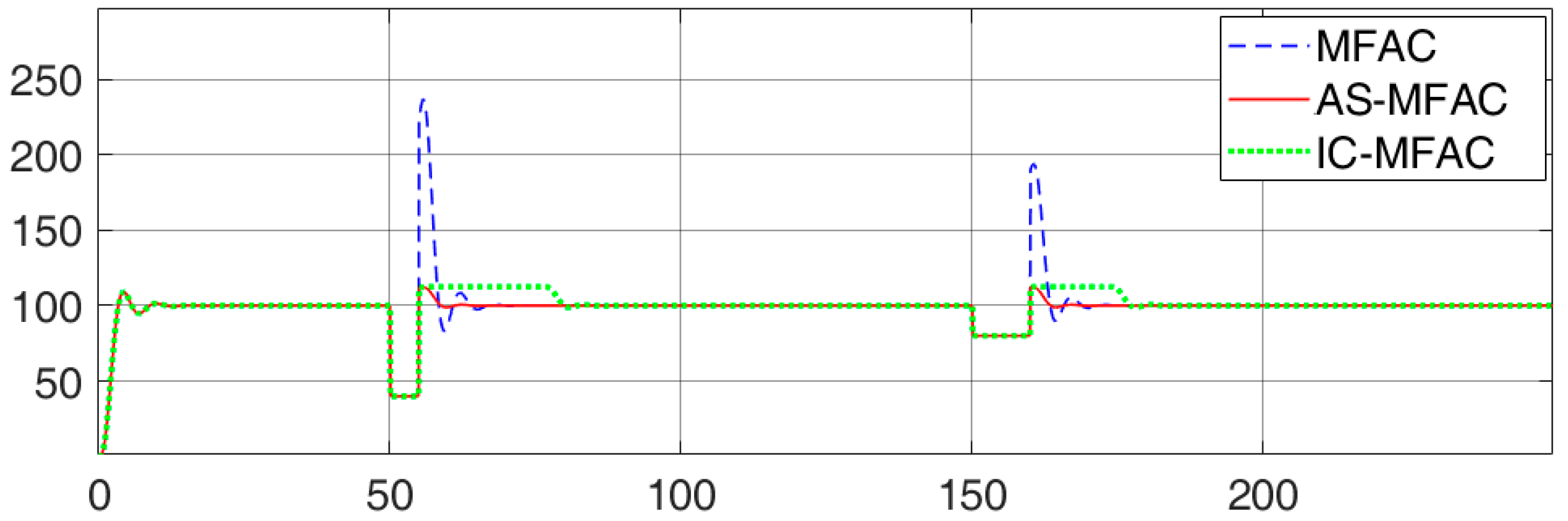
4.1.1. Algorithm Effect Comparison
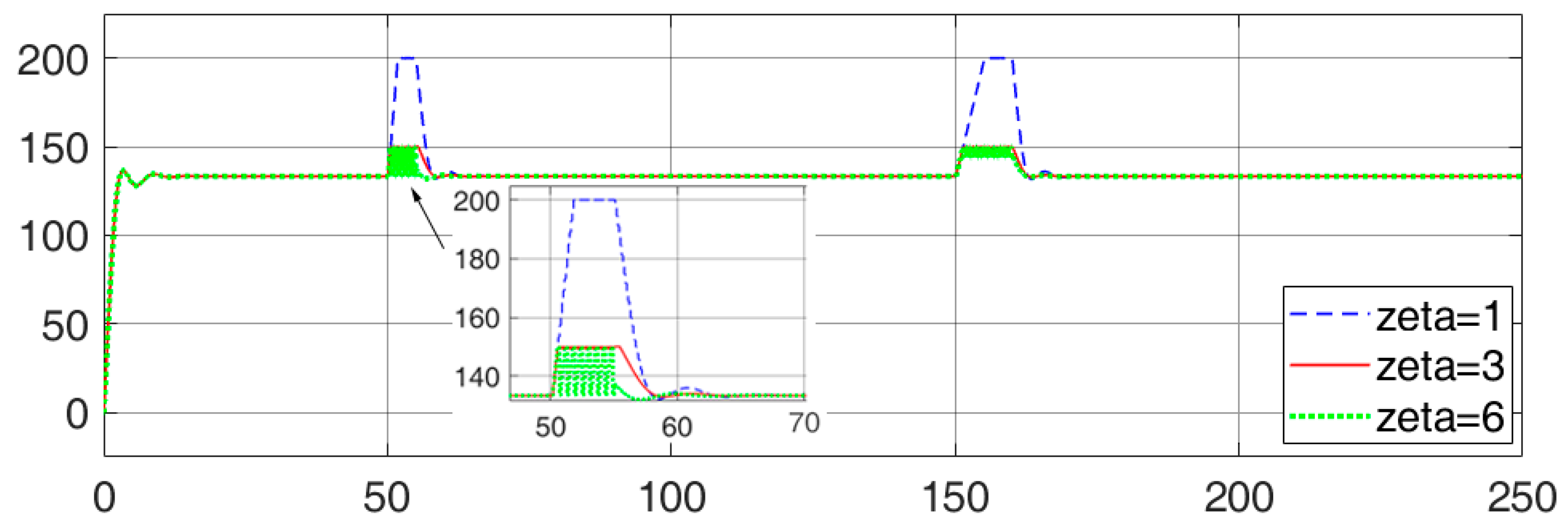
4.1.2. Key Parameters Analysis of AS-MFAC
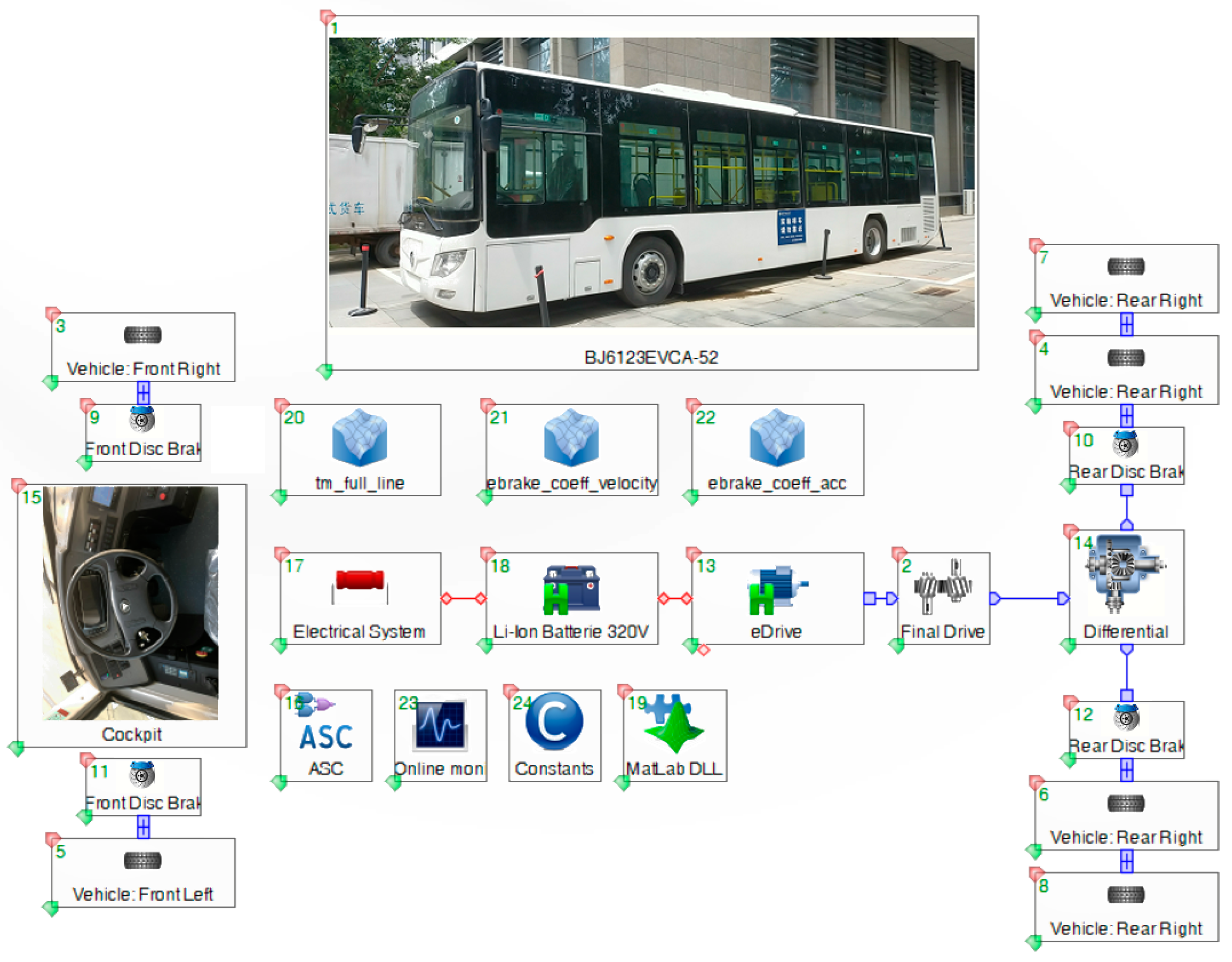
4.2. AVL Cruise Hardware in the Loop Simulation
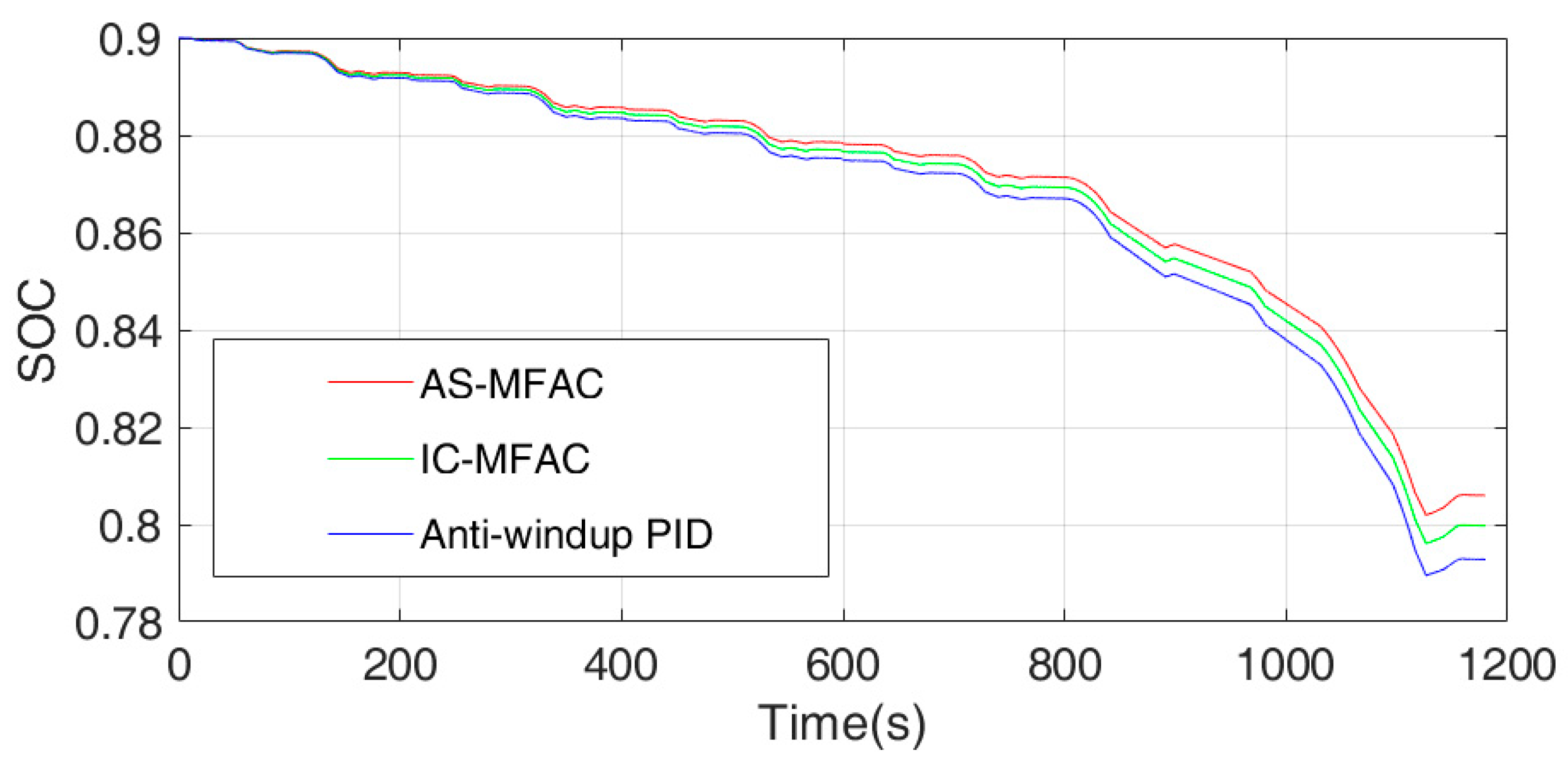
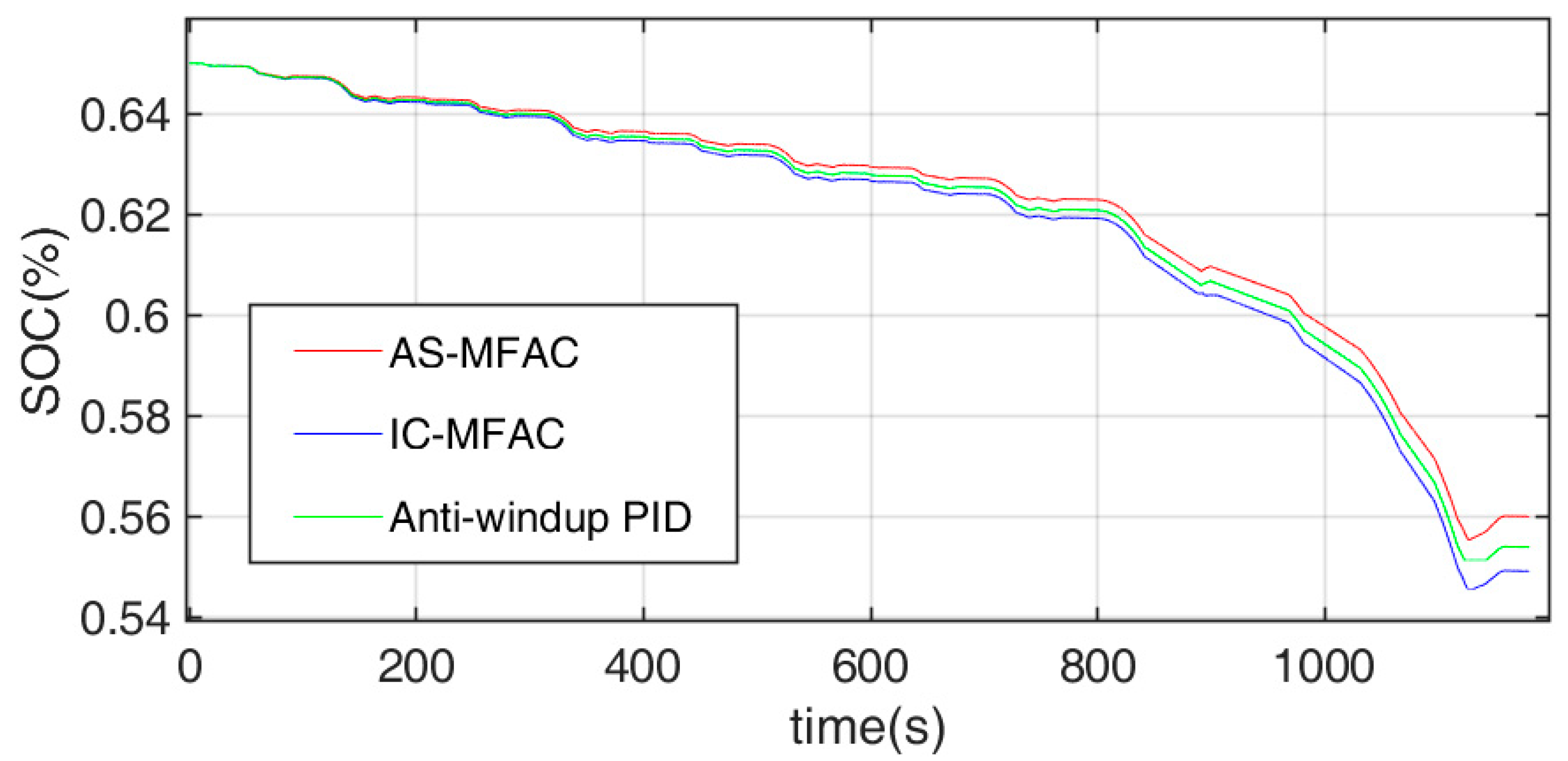
4.2.1. Battery Consumption Experiment
4.2.2. Speed Tracking Experiment
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A
References
- Zhongshi, Z.; Ruihai, M.; Lifang, W.; Junzhi, Z. Novel PMSM Control for Anti-Lock Braking Considering Transmission Properties of the Electric Vehicle. IEEE Trans. Veh. Technol. 2018, 67, 10378–10386. [Google Scholar] [CrossRef]
- Król, A.; Sierpiński, G. Application of a Genetic Algorithm With a Fuzzy Objective Function for Optimized Siting of Electric Vehicle Charging Devices in Urban Road Networks. IEEE Trans. Intell. Transp. Syst. 2021, 1–12. [Google Scholar] [CrossRef]
- Mehta, S.; Hemamalini, S. A Dual Control Regenerative Braking Strategy for Two-Wheeler Application. Energy Procedia 2017, 117, 299–305. [Google Scholar] [CrossRef]
- Hardman, S.; Chandan, A.; Tal, G.; Turrentine, T. The effectiveness of financial purchase incentives for battery electric vehicles—A review of the evidence. Renew. Sustain. Energy Rev. 2017, 80, 1100–1111. [Google Scholar] [CrossRef]
- Gao, Y.; Chen, L.; Ehsani, M. Investigation of the Effectiveness of Regenerative Braking for EV and HEV. SAE Trans. 1999, 108, 3184–3190. [Google Scholar]
- Masih-Tehrani, M.; Dahmardeh, M. A Novel Power Distribution System Employing State of Available Power Estimation for a Hybrid Energy Storage System. IEEE Trans. Ind. Electron. 2018, 65, 6676–6685. [Google Scholar] [CrossRef]
- Jung, S.; Ko, J. Study on Regenerative Energy RecoSvery of Electric Vehicle Through Voltage Control Using Switched Capacitor. IEEE Trans. Veh. Technol. 2021, 70, 4324–4339. [Google Scholar] [CrossRef]
- Ko, J.; Ko, S.; Son, H.; Yoo, B.; Cheon, J.; Kim, H. Development of Brake System and Regenerative Braking Cooperative Control Algorithm for Automatic-Transmission-Based Hybrid Electric Vehicles. IEEE Trans. Veh. Technol. 2015, 64, 431–440. [Google Scholar] [CrossRef]
- Heydari, S.; Fajri, P.; Rasheduzzaman, M.; Sabzehgar, R. Maximizing Regenerative Braking Energy Recovery of Electric Vehicles Through Dynamic Low-Speed Cutoff Point Detection. IEEE Trans. Transp. Electrif. 2019, 5, 262–270. [Google Scholar] [CrossRef]
- Fujiki, N.; Koike, Y.; Ito, Y.; Suzuki, G.; Gotoh, S.; Yukio, O.; Yamagucki, T. Development of an Electrically-Driven Intelligent Brake System for EV. Autom. Veh. Technol. 2011, 65, 399–405. [Google Scholar] [CrossRef]
- Aldred, C. Brake applied to recall cover. Bus. Insur. 2004, 38, 1. [Google Scholar]
- Aoki, Y.; Suzuki, K.; Nakano, H.; Nojiri, Y.; Shirase, T.; Sakai, K. Development of Hydraulic Servo Brake System for Hybrid Vehicle. Trans. Soc. Automot. Eng. Jpn. 2007, 38, 25–30. [Google Scholar]
- Nakamura, E.; Soga, M.; Sakai, A.; Otomo, A.; Kobayashi, T. Development of Electrically Controlled Brake System for Hybrid Vehicle; SAE Technical Papers; SAE International: Warrendale, PA, USA, 2002; Volume 2, pp. 129–137. [Google Scholar]
- Rigaut, T.; Carpentier, P.; Chancelier, J.P.; De Lara, M.; Waeytens, J. Stochastic Optimization of Braking Energy Storage and Ventilation in a Subway Station. IEEE Trans. Power Syst. 2019, 34, 1256–1263. [Google Scholar] [CrossRef]
- Peng, H.; Wang, W.; Xiang, C.; Li, L.; Wang, X. Torque Coordinated Control of Four In-Wheel Motor Independent-Drive Vehicles With Consideration of the Safety and Economy. IEEE Trans. Veh. Technol. 2019, 68, 9604–9618. [Google Scholar] [CrossRef]
- Xu, W.; Chen, H.; Zhao, H.; Ren, B. Torque optimization control for electric vehicles with four in-wheel motors equipped with regenerative braking system. Mechatronics 2019, 57, 95–108. [Google Scholar] [CrossRef]
- Guoqing, X.; Kun, X.; Chunhua, Z.; Xinye, Z.; Taimoor, Z. Fully Electrified Regenerative Braking Control for Deep Energy Recovery and Maintaining Safety of Electric Vehicles. IEEE Trans. Veh. Technol. 2016, 65, 1186–1198. [Google Scholar] [CrossRef]
- Fnadi, M.; Du, W.; Plumet, F.; Benamar, F. Constrained Model Predictive Control for dynamic path tracking of a bi-steerable rover on slippery grounds. Control Eng. Pract. 2021, 107, 104693. [Google Scholar] [CrossRef]
- Gao, J.; Zhang, G.; Wu, P.; Zhao, X.; Wang, T.; Yan, W. Model Predictive Visual Servoing of Fully-Actuated Underwater Vehicles With a Sliding Mode Disturbance Observer. IEEE Access 2019, 7, 25516–25526. [Google Scholar] [CrossRef]
- Fnadi, M.; Alexandre dit Sandretto, J. Experimental Validation of a Guaranteed Nonlinear Model Predictive Control. Algorithms 2021, 14, 248. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhang, H.; Yang, C.; Xiang, C.; Li, L. Research on predictive control strategy for efficient braking energy recovery of hybrid electric bus based on new improved genetic algorithm. J. Mech. Eng. 2020, 56, 11. [Google Scholar]
- Deng, R.; Liu, Y.; Chen, W.; Liang, H. A Survey on Electric Buses—Energy Storage, Power Management, and Charging Scheduling. IEEE Trans. Intell. Transp. Syst. 2021, 22, 9–22. [Google Scholar] [CrossRef]
- Huang, X.; Wang, J. Model Predictive Regenerative Braking Control for Lightweight Electric Vehicles with in-Wheel Motors. J. Automob. Eng. 2012, 226, 1220–1232. [Google Scholar] [CrossRef]
- Yaonan, W.; Xizheng, Z.; Xiaofang, Y.; Guorong, L. Position-Sensorless Hybrid Sliding-Mode Control of Electric Vehicles With Brushless DC Motor. IEEE Trans. Veh. Technol. 2011, 60, 421–432. [Google Scholar] [CrossRef]
- Wang, C.; Zhao, W.; Li, W. Braking sense consistency strategy of electro-hydraulic composite braking system. Mech. Syst. Signal Process. 2018, 109, 196–219. [Google Scholar] [CrossRef]
- Hoang, H.S.; Baraille, R. A simple numerical method based simultaneous stochastic perturbation for estimation of high dimensional matrices. Multidimens. Syst. Signal Process. 2018, 30, 195–217. [Google Scholar] [CrossRef]
- Hou, Z.; Jin, S. A Novel Data-Driven Control Approach for a Class of Discrete-Time Nonlinear Systems. IEEE Trans. Control Syst. Technol. 2011, 19, 1549–1558. [Google Scholar] [CrossRef]
- Safonov, M.G.; Tsao, T.-C. The unfalsified control concept and learning. IEEE Trans. Autom. Control 1997, 42, 843–847. [Google Scholar] [CrossRef]
- Hjalmarsson, H.; Gevers, M.; Gunnarsson, S.; Lequin, O. Iterative Feedback Tuning: Theory and Applications. IEEE Control Syst. 1998, 18, 26–41. [Google Scholar] [CrossRef]
- Previde, F.; Belloli, D.; Cologne, A.; Savaresi, S.M. Virtual Reference Feedback Tuning (VRFT) Design of Cascade Control Systems with Application to an Electro-Hydrostatic Actuator. IFAC Proc. Vol. 2010, 43, 626–632. [Google Scholar] [CrossRef]
- Meng, D.; Moore, K.L. Robust Iterative Learning Control for Nonrepetitive Uncertain Systems. IEEE Trans. Autom. Control 2017, 62, 907–913. [Google Scholar] [CrossRef]
- Ji, H.; Wei, Y.; Fan, L.; Liu, S.; Wang, Y.; Wang, L. Disturbance-Improved Model-Free Adaptive Prediction Control for Discrete-Time Nonlinear Systems with Time Delay. Symmetry 2021, 13, 2128. [Google Scholar] [CrossRef]
- Shida, L.; Zhongsheng, H.; Taotao, T.; Zhidong, D.; Zhenxuan, L. A Novel Dual Successive Projection-Based Model-Free Adaptive Control Method and Application to an Autonomous Car. IEEE Trans. Neural Netw. Learn. Syst. 2019, 30, 3444–3457. [Google Scholar] [CrossRef]
- Coelho, L.; Coelho, A. Model-free adaptive control optimization using a chaotic particle swarm approach. Chaos Solitons Fractals 2009, 41, 2001–2009. [Google Scholar] [CrossRef]
- Rong-Jong, W.; Zhi-Wei, Y. Adaptive Fuzzy Neural Network Control Design via a T–S Fuzzy Model for a Robot Manipulator Including Actuator Dynamics. IEEE Trans. Syst. Man Cybern. 2019, 38, 1326–1346. [Google Scholar] [CrossRef]
- Tan, K.K.; Lee, T.H.; Huang, S.N.; Leu, F.M. Adaptive-Predictive Control of a Class of SISO Nonlinear Systems. Dyn. Control 2001, 11, 151–174. [Google Scholar] [CrossRef]
- Li, W.; Du, H.; Li, W. Four-Wheel Electric Braking System Configuration With New Braking Torque Distribution Strategy for Improving Energy Recovery Efficiency. IEEE Trans. Intell. Transp. Syst. 2020, 21, 87–103. [Google Scholar] [CrossRef]
- Jabbour, N.; Mademlis, C. Supercapacitor-Based Energy Recovery System With Improved Power Control and Energy Management for Elevator Applications. IEEE Trans. Power Electron. 2017, 32, 9389–9399. [Google Scholar] [CrossRef]
- Ni, J.; Hu, J.; Xiang, C. Control-Configured-Vehicle Design and Implementation on an X-by-Wire Electric Vehicle. IEEE Trans. Veh. Technol. 2018, 67, 3755–3766. [Google Scholar] [CrossRef]
- Xudong, Z.; Dietmar, G.; Jiayuan, L. Energy-Efficient Toque Allocation Design of Traction and Regenerative Braking for Distributed Drive Electric Vehicles. IEEE Trans. Veh. Technol. 2018, 67, 285–295. [Google Scholar] [CrossRef]
- Wang, J.C.; He, R.; Kim, Y.B. Optimal Anti-Lock Braking Control With Nonlinear Variable Voltage Charging Scheme for an Electric Vehicle. IEEE Trans. Veh. Technol. 2020, 69, 7211–7222. [Google Scholar] [CrossRef]
- Liu, B.; Li, L.; Wang, X.; Cheng, S. Hybrid Electric Vehicle Downshifting Strategy Based on Stochastic Dynamic Programming During Regenerative Braking Process. IEEE Trans. Veh. Technol. 2018, 67, 4716–4727. [Google Scholar] [CrossRef]
- Liang, C.; Qiang, H.; Zicheng, F.; Zhe, L.; Yanwen, P. Research on regenerative braking control strategy of pure electric vehicle. J. Automot. Eng. 2016, 5, 244–251. [Google Scholar]
- Kumar, G.V.; Chuang, C.H.; Lu, M.Z.; Liaw, C.-M. Development of an Electric Vehicle Synchronous Reluctance Motor Drive. IEEE Trans. Veh. Technol. 2020, 69, 5012–5024. [Google Scholar] [CrossRef]
- Naranjo, W.; Camargo, L.E.M.; Pereda, J.E.; Cortes, C. Design of Electric Buses of Rapid Transit Using Hybrid Energy Storage and Local Traffic Parameters. IEEE Trans. Veh. Technol. 2017, 66, 5551–5563. [Google Scholar] [CrossRef]
- Tavernini, D.; Vacca, F.; Metzler, M.; Savitski, D.; Ivanov, V.; Gruber, P.; Hartavi, A.E.; Dhaens, M.; Sorniotti, A. An Explicit Nonlinear Model Predictive ABS Controller for Electro-Hydraulic Braking Systems. IEEE Trans. Ind. Electron. 2019, 67, 3990–4001. [Google Scholar] [CrossRef]
- Donghyun, K.; Chulsoo, K.; Sungho, H.; Hyunsoo, K. Hardware in the Loop Simulation of Vehicle Stability Control using Regenerative Braking and Electro Hydraulic Brake for Hybrid Electric Vehicle. IFAC Proc. Vol. 2008, 41, 5664–5669. [Google Scholar] [CrossRef] [Green Version]
- Fnadi, M.; Plumet, F.; Benamar, F. Nonlinear Tire Cornering Stiffness Observer for a Double Steering Off-Road Mobile Robot. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019. [Google Scholar]
- Oudghiri, M.; Chadli, M.; Hajjaji, A.E. Lateral vehicle velocity estimation using fuzzy sliding mode observer. In Proceedings of the Conference on Control & Automation, Ajaccio, France, 25–27 June 2008. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter Name | Symbol | Numerical Value |
|---|---|---|
| Curb weight (complete vehicle) | kg | 11,600/12,000 |
| Wheelbase | mm | 5900 |
| Front suspension | mm | 2670 |
| Rear suspension | mm | 3430 |
| Maximum number of passengers | person | 60 |
| Parameter | Symbol | Numerical Value |
|---|---|---|
| Speed ratio of the main reducer | / | 6.058 |
| Transmission speed ratio | / | 1 |
| Transmission efficiency | / | 0.96 |
| Wheel rolling radius | mm | 507 |
| Linear resistance | N | 0.0 |
| Square resistance | N | 0.03399 |
| Constant resistance | / | 143.06 |
| Rated voltage/maximum voltage | V | 320/420 |
| Method | AS-MFAC | IC-MFAC | Anti-windup PID |
|---|---|---|---|
| Initial SOC | 90% | 90% | 90% |
| Final SOC | 80.599% | 79.978% | 79.282% |
| Method | AS-MFAC | IC-MFAC | Anti-windup PID |
|---|---|---|---|
| Initial SOC | 65% | 65% | 65% |
| Final SOC | 55.995% | 55.387% | 54.908% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, S.; Li, Z.; Ji, H.; Wang, L.; Hou, Z. A Novel Anti-Saturation Model-Free Adaptive Control Algorithm and Its Application in the Electric Vehicle Braking Energy Recovery System. Symmetry 2022, 14, 580. https://doi.org/10.3390/sym14030580
Liu S, Li Z, Ji H, Wang L, Hou Z. A Novel Anti-Saturation Model-Free Adaptive Control Algorithm and Its Application in the Electric Vehicle Braking Energy Recovery System. Symmetry. 2022; 14(3):580. https://doi.org/10.3390/sym14030580
Chicago/Turabian StyleLiu, Shida, Zhen Li, Honghai Ji, Li Wang, and Zhongsheng Hou. 2022. "A Novel Anti-Saturation Model-Free Adaptive Control Algorithm and Its Application in the Electric Vehicle Braking Energy Recovery System" Symmetry 14, no. 3: 580. https://doi.org/10.3390/sym14030580