
Research on Mechanism and Measurement Model for the Effects of Path Dependence on Human Error in Space Station Manipulator Tasks

Abstract
:1. Introduction
2. Influencing Factors Analysis of Path Dependence Symmetric Effect on Human Error
2.1. Initial Human Error Influencing Factors Based on Path Dependence
- (1)
- Based on expert consultation and interviews at the China Astronaut Research and Training Center, four categories of factors that influence path-dependent human error were preliminarily identified, which are task conflict (it is known as similar tasks or cognition results, which can influence path dependence), equipment fault and deterioration, environmental impact and human factors (Table 1).
- (2)
- Based on each category of influencing factors, by combining expert interviews with astronauts, domain experts and related researchers and literature reviews, the initial influencing factors were obtained after analyzing the results of interviews and literature reviews (Table 1).
2.2. Determinzing Final Influencing Factors
2.2.1. Calculation Formula of Influencing Factors Relative Importance
2.2.2. Questionnaire Survey and Statistics
2.2.3. Result Analysis
- (1)
- Task conflict, equipment fault and deterioration, environmental impact and human factors all significantly influence the effect mode of path dependence on human error. Human factors have the largest influence, followed by task conflict, environmental impact, and equipment fault and deterioration.
- (2)
- There are significant pairwise correlations between task conflict, equipment fault and deterioration, and environmental impact, as well as between second-level indicators of human error.
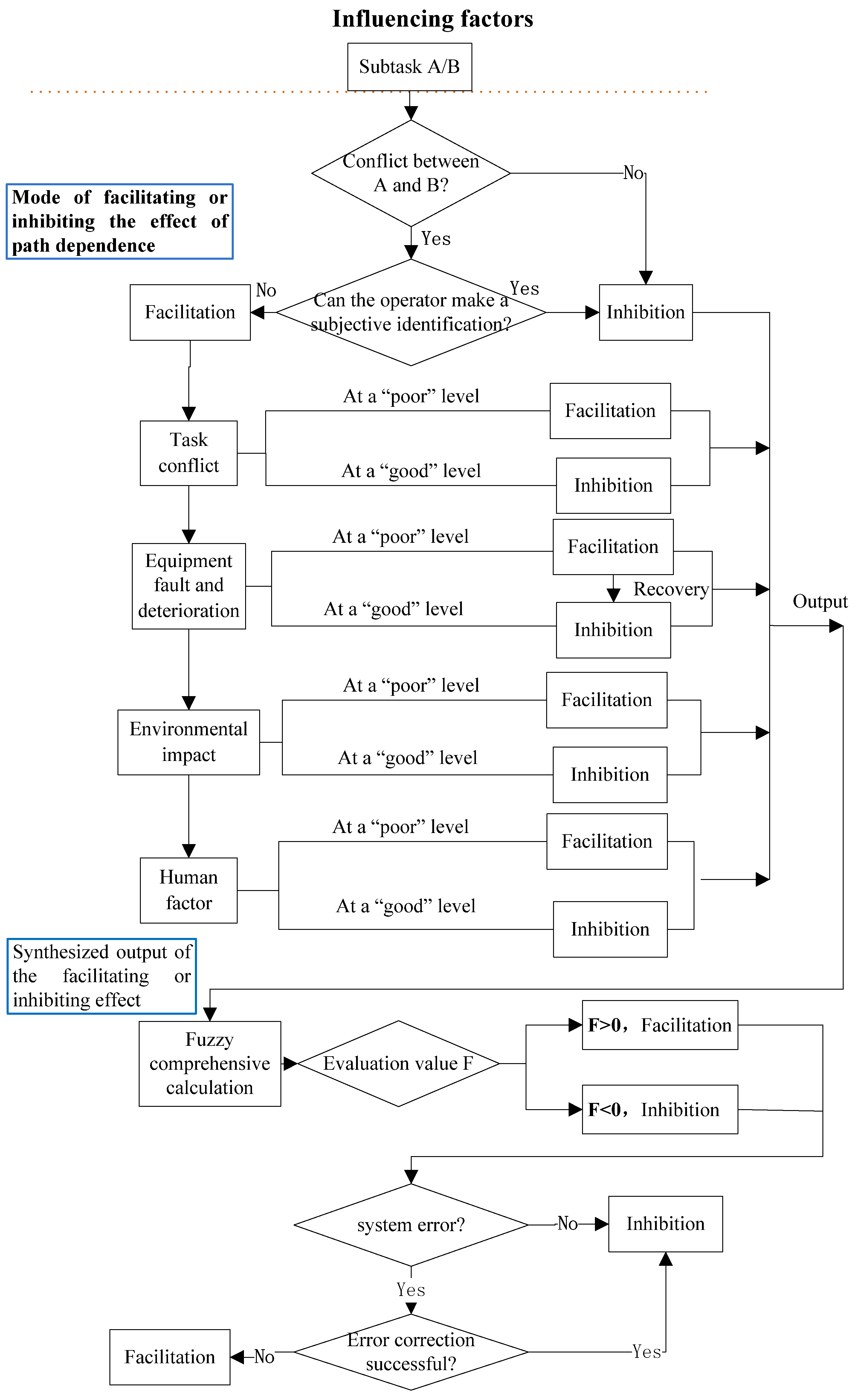
3. Mode of the Symmetric Effect of Path Dependence on Human Error in the Context of Space Station Manipulator Operation
- (1)
- Equipment faults, for which the effect of recovery is considered, are studied. If the equipment is recovered, the mode of effect of path dependence will be changed.
- (2)
- The symmetric effect mode (inhibition or facilitation) of path dependence (as “inertial thinking”) on human error is determined based on the extent to which the task factor matches the mental factor. Influenced by inertial thinking, astronauts tend to habitually migrate the thought process, operation mode and experience of the previous tasks to other similar tasks during execution, thereby forming path dependence. Because of path dependence, an environmental change, a sudden equipment fault and uncertainty in the personnel state may affect the human error to some extent, mainly in the form of either a facilitating or an inhibiting mode. Inertial thinking is the basis of the emergence of “path dependence”, while the mode of the symmetric effect on human error, either “inhabitation” or “facilitation”, is the result of the manifestation of “path dependence”.
- (3)
- The change in the effect mode due to behavioral recovery (corrective action) is considered.
4. A Calculating Model of Path Dependence Symmetric Effect on Human–Machine Interactions
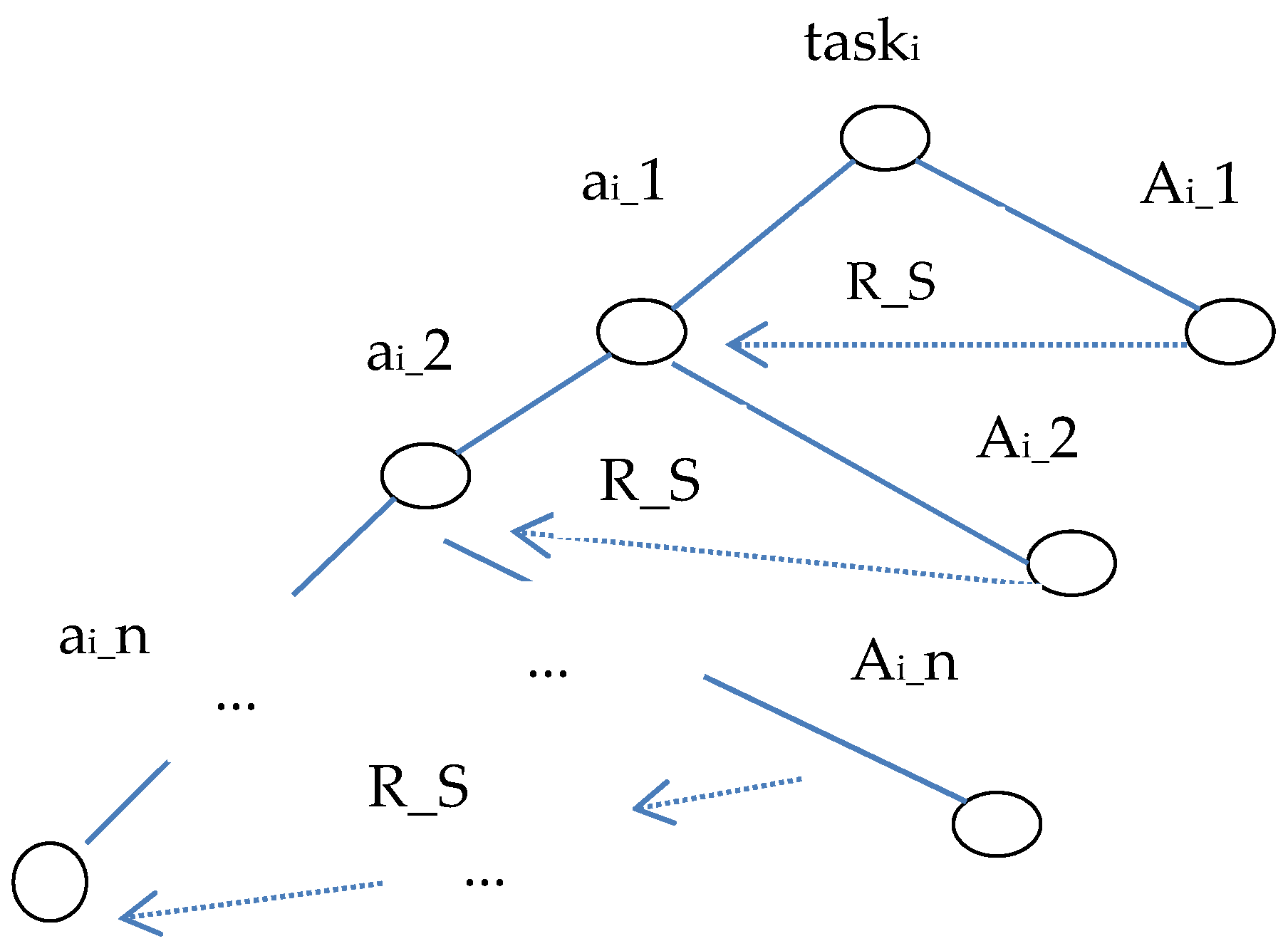
4.1. Calculating Symmetric Model of Human Error Effect Degree
- taski: ith task.
- ai_n: inhibition effect of the nth subtask of the ith task.
- Ai_n: facilitation effect of the path dependence of the nth subtask of the ith task on human error.
- R_S: successful recovery for the operation failure.
- d(taski)fac: DOF of the path dependence of the ith task on human error.
- d(Ai_n): DOF of the nth subtask of the ith task.
- d(taski)inh: DOI of the path dependence of the ith task on human error.
- d(ai_n): DOI of the nth subtask of the ith task.
- d(Ai_j): DOF of the jth subtask of the ith task.
- d(ai_j): DOI of the jth subtask of the ith task.
- wi_n: weight of the nth subtask of the ith task, and wi_1 + wi_2 +... wi_n = 1.
- Fij(x,w): function for calculating the DOF or DOI of the jth subtask of the ith task.
4.2. Methods for Calculating the DOE of Subtasks
4.3. Fij(x,w) Evaluation Methods
4.3.1. Selection of Methods for Evaluating the DOE of Human Error
4.3.2. FUZZY Method Fij(x,w) Description to Evaluate the DOE
- (1)
- Determination of impact factors set
- (2)
- Determination of the comment set
- (3)
- Determination of the membership matrix
- (4)
- Calculation formula for the fuzzy comprehensive evaluation
4.3.3. Weights of Influencing Factors
- (1)
- Random linear combination of k weight vectors:
- (2)
- According to the differential properties of matrix, the linear equation of optimal first-order derivative about Equation (11) is:
- (3)
- mk can be obtained based on Formula (11). The normalization expression of mk is as follows:
- (4)
- The optimal comprehensive weight calculation method for the evaluation factors is written as:
5. Results and Discussion
5.1. Influencing Factors
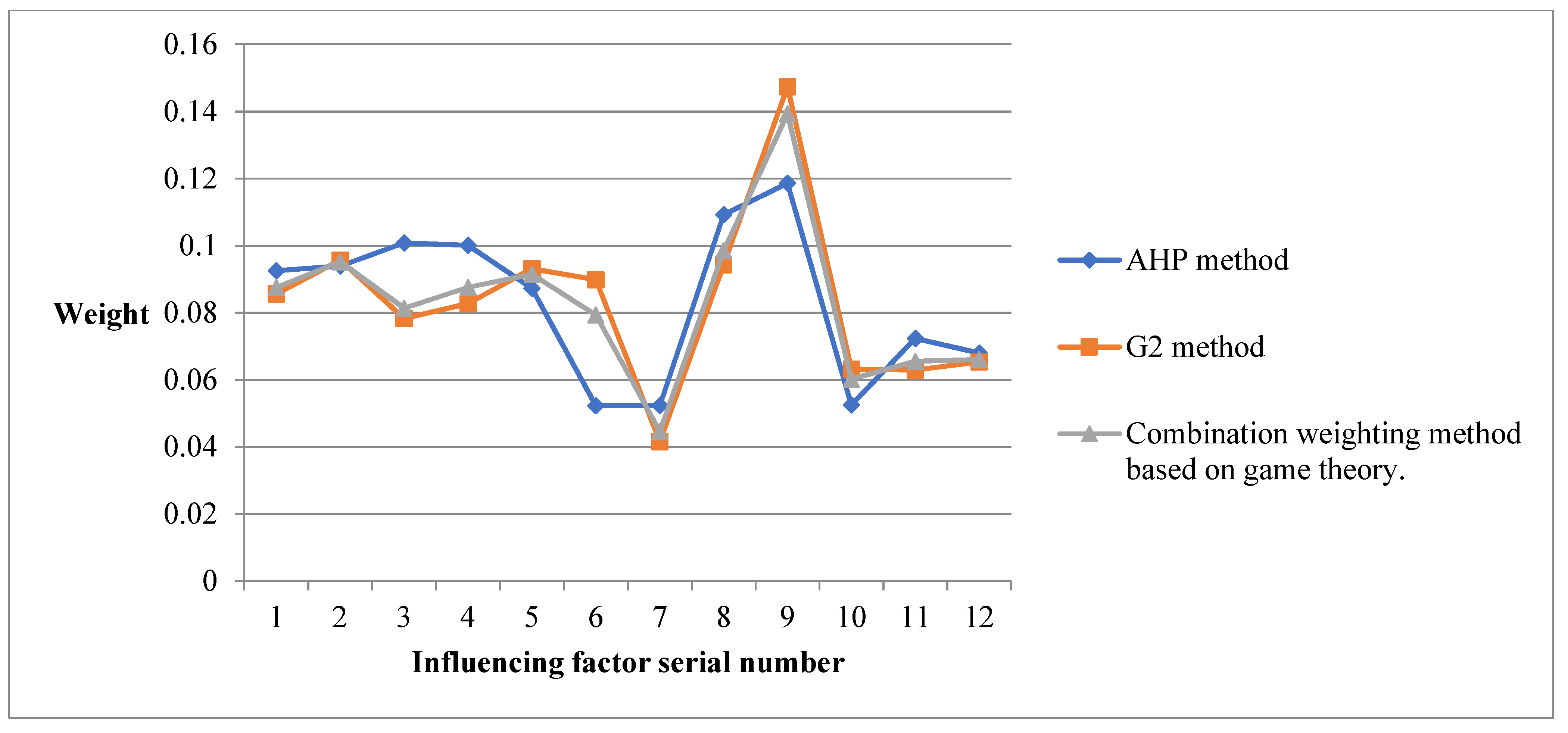
5.2. Weights of Influencing Factors
5.3. Performance Discussion of the Fuzzy Evaluation Method of Fij(x,w)
- (1)
- Convergence Analysis
- (2)
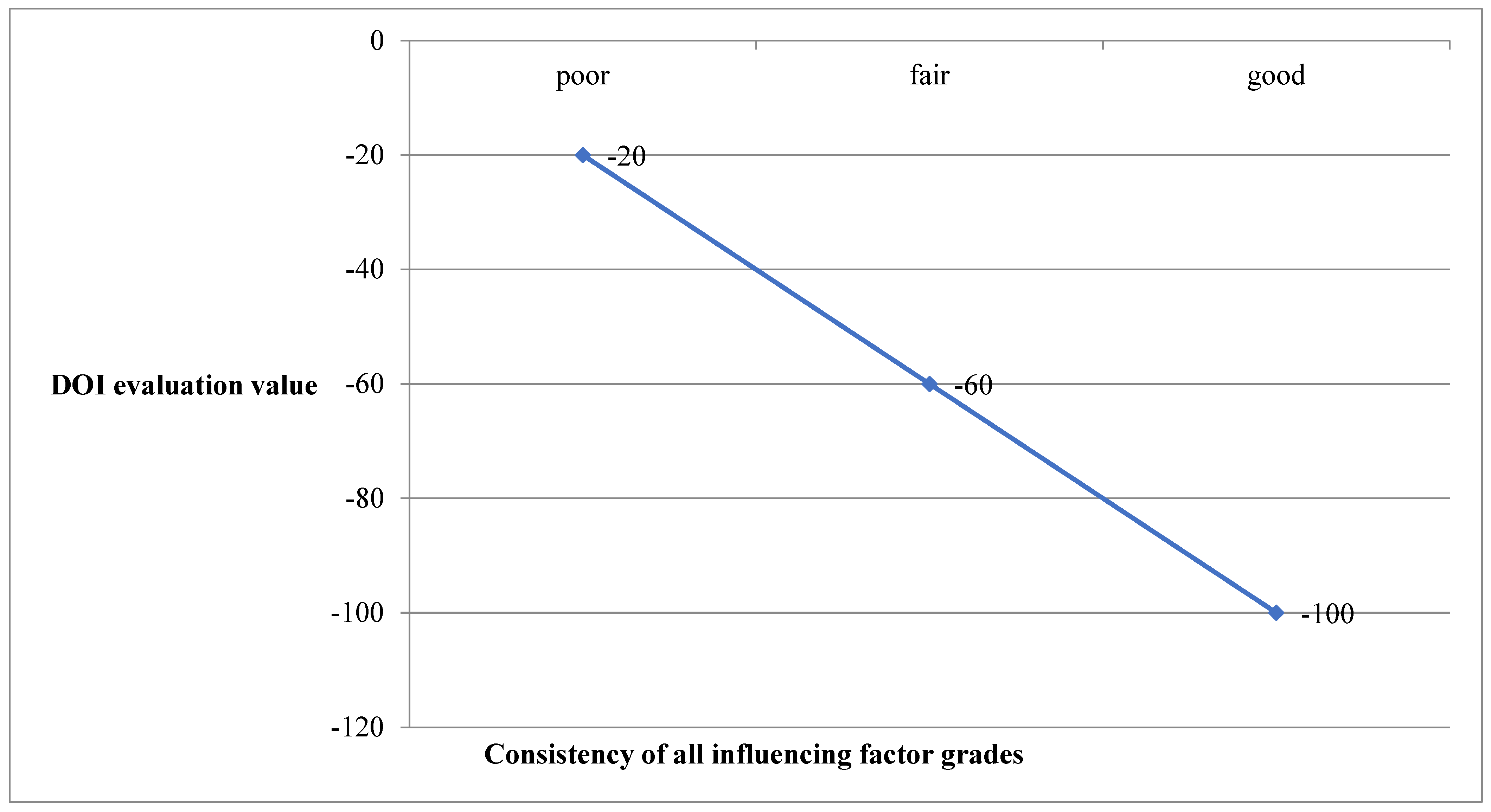
- Analysis of the Consistency/Effectiveness of the Evaluation Results
- (3)
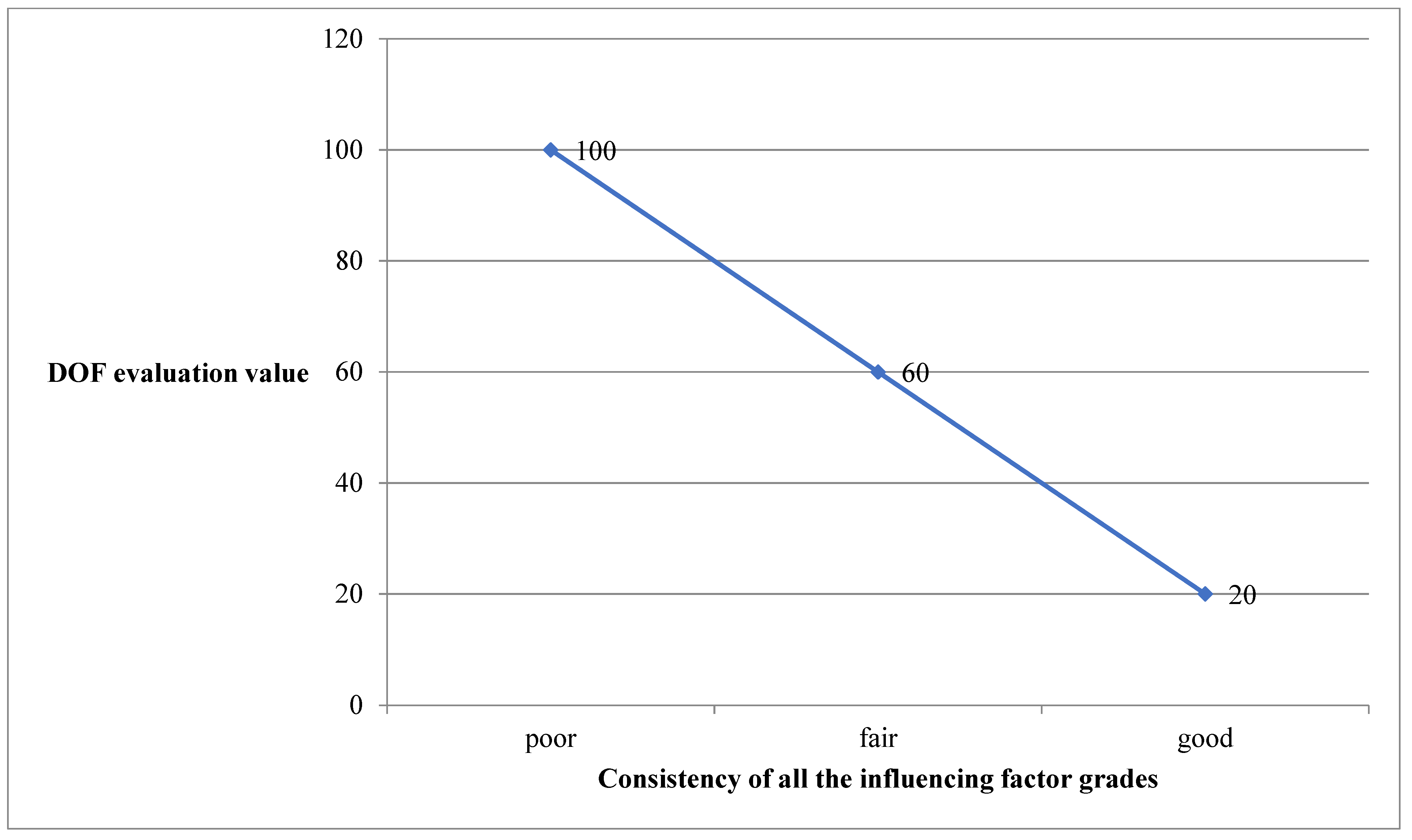
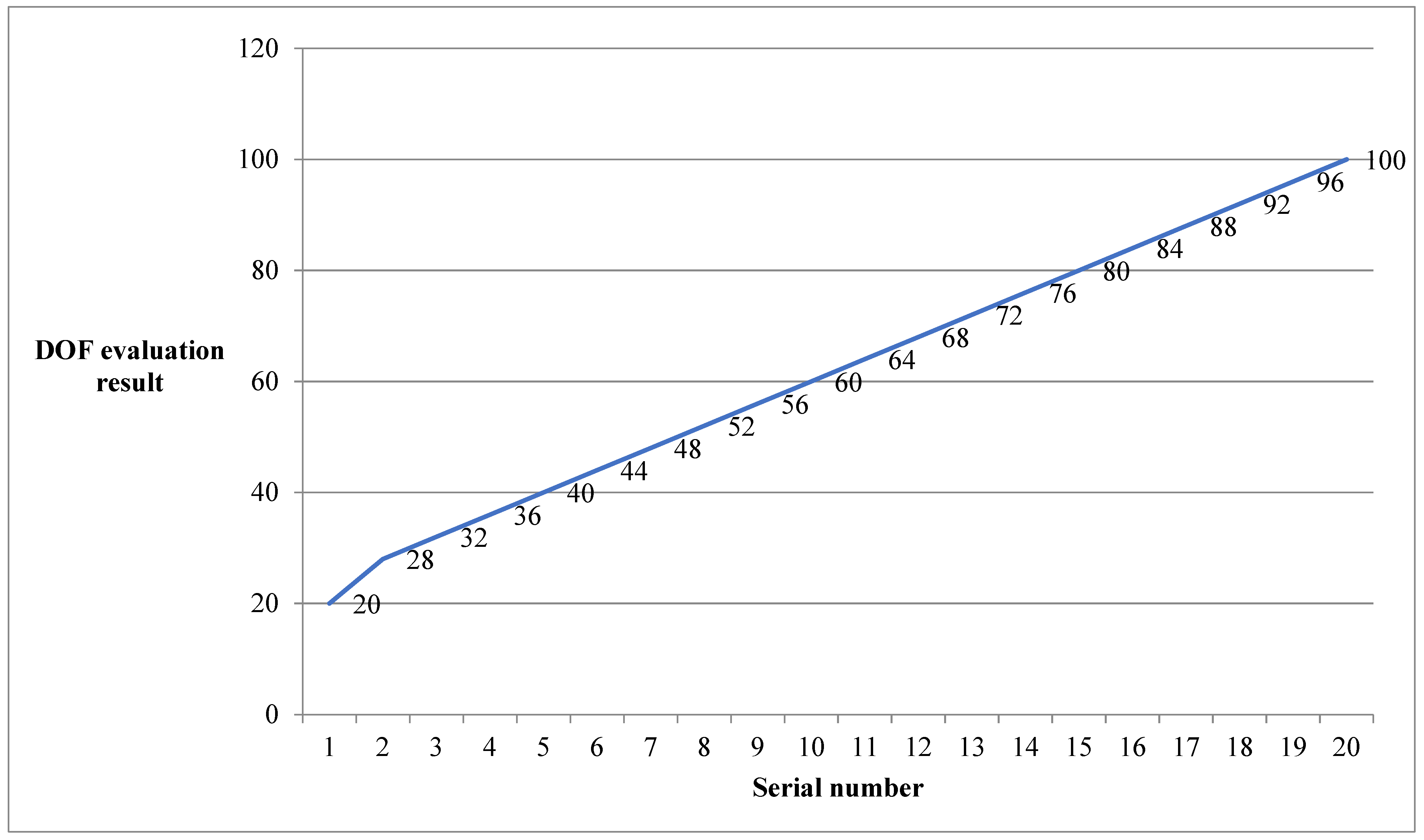
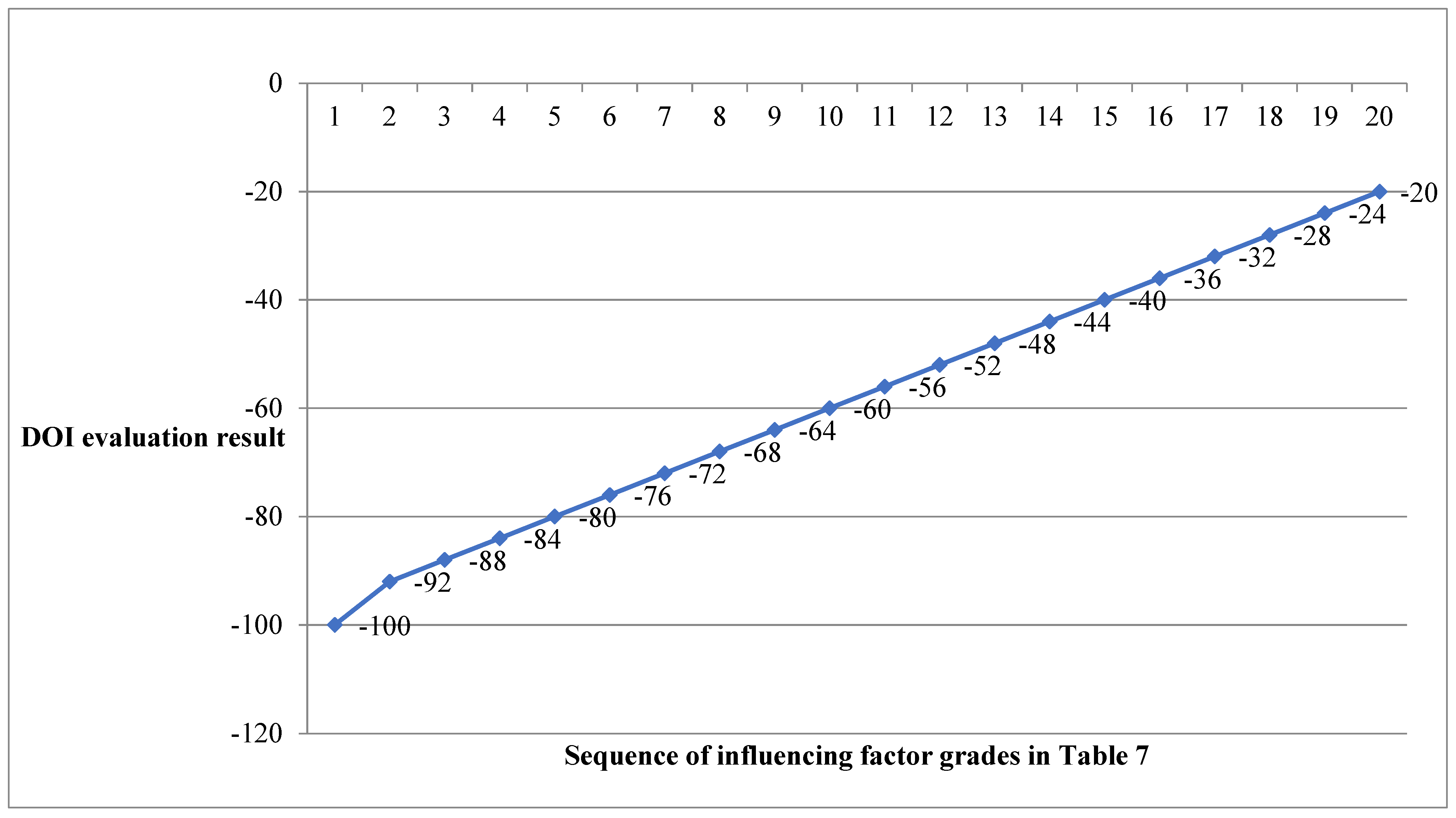
- Variation trend of the calculation results
- (1)
- Analysis of the variation trend of the DOF evaluation results for human error
6. Example Analysis
- (1)
- Subtask A1
- (2)
- Analysis of the DOF/DOI consistency of task A
| d (A)fac = w1 * ×FA1 (x, w) + w2 × FA2 (x, w) + w3 × FA3 (x, w) |
| = 0.2 × (100 − |−22.0920|) + 0.3 × (100 − |−1.8196|) + 0.5 ×14.2152 |
| = 52.1433 |
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Bratianu, C. Thinking patterns and knowledge dynamics. In Proceedings of the 8th European Conference on Knowledge Management, Consorci Escola Industrial de Barcelona, Barcelona, Spain, 6–7 September 2007; Martins, B., Renyi, D., Eds.; Academic Conferences Ltd.: Reading, UK, 2007; pp. 152–156. [Google Scholar]
- Macpherson, R.; Stanovich, K.E. Cognitive ability, thinking dispositions, and instructional set as predictors of critical thinking, Learning and Individual Differences. Learn. Individ. Differ. 2007, 17, 115–127. [Google Scholar] [CrossRef]
- Lewis, C.; Lovatt, P.J. Breaking Away from Set Patterns of Thinking: Improvisation and Divergent Thinking, Thinking Skills and Creativity; Elsevier: Amsterdam, The Netherlands, 2013. [Google Scholar]
- Qingxuan, J.; Tong, L.; Gang, C.; Hanxu, S.; Jian, Z. Sensitivity Analysis on Factors Influencing Motion Reliability of Space Manipulator Based on the Multilayer Mapping Model. J. Mech. Eng. 2017, 53, 10–19. (In Chinese) [Google Scholar]
- Yang, Z.; Wu, D.; Wang, D. Exploring spatial path dependence in industrial space with big data: A case study of Beijing. Cities 2021, 108, 102975. [Google Scholar] [CrossRef]
- Yi, T.W.C.S.X.; Guohua, J.; Zhiqiang, T. Study on Effects of Basic Cognitive Abilities on Teleoperation Tasks under Various Lacking Levels of 3D Information. Manned Spacefl. 2017, 23, 266–273. (In Chinese) [Google Scholar]
- Chen, H.; Zeng, S.; Guo, J. Reliability assessment of man-machine systems subject to mutually dependent machine degradation and human errors. Reliab. Eng. Syst. Saf. 2019, 190, 106504. [Google Scholar]
- Tang, W.; Chen Xiao, S.; Jiang, Y.; Guo, H.; Tian, Z. Visual Information Presentation Mode for Teleoperation of Manipulator. Space Med. Med. Eng. 2017, 30, 73–78. (In Chinese) [Google Scholar]
- Tang, W.; Chen, S.; Xiao, Y.; Jiang, G.; Tian, Z. Influence of loss of three-dimensional information on manipulator teleoperation mission. J. Beijing Univ. Aeronaut. Astronaut. 2017, 43, 335–343. (In Chinese) [Google Scholar]
- Tang, W.; Chen, S.; Xiao, Y.; Jiang, G.; Tian, Z. Study on Mental Workload in Manipulator Teleoperation Mission. Manned Spacefl. 2017, 23, 688–696. (In Chinese) [Google Scholar]
- Douglass, C.N. Institutions, Institutional Change and Economic Performance; Shanghai People’s Publishing House: Shanghai, China, 2014. (In Chinese) [Google Scholar]
- Liu, H.; Li, Z.; Zhang, J.; You, X. A large group decision making approach for dependence assessment in human reliability analysis. Reliab. Eng. Syst. Saf. 2018, 135, 144. [Google Scholar] [CrossRef]
- Shi, W.; Chang, J.; Ma, J.; Wang, Y.; Gao, L.; Bao, W. Path dependence characteristic of shock train in a 2D hypersonic inlet with variable background waves. Aerosp. Sci. Technol. 2019, 86, 650–658. [Google Scholar] [CrossRef]
- Dlouhy, K.; Biemann, T. Path dependence in occupational careers: Understanding occupational mobility development throughout individuals’ careers. J. Vocat. Behav. 2018, 104, 86–97. [Google Scholar] [CrossRef]
- Jia, Z.; Vatto, T.E. Predicting the path of labor supply responses when state dependence matters. Labour Econ. 2021, 71, 102004. [Google Scholar] [CrossRef]
- Zhang, S.; Li, X.; Zhang, W.; Zhou, W.; Chen, L.; Xiao, Y. Reliability Modeling and Analysisof Teleoperation System with Path-Dependence Effect Considered. In Proceedings of the International Conference on Man-Machine-Environment System Engineering, Beijing, China, 23–25 October 2021. [Google Scholar]
- Shen, X. Environmental and psychological factors affecting the health of astronauts. Aerosp. China 2006, 3, 29–31. (In Chinese) [Google Scholar]
- Wichens, C.D.; Hollands, J.G. Assessing mental workload. In Engineering Psychology and Human Performance, 3rd ed.; Prentice-Hall: Upper Saddle River, NJ, USA, 2000; pp. 459–471. [Google Scholar]
- Sun, Z.; Gong, E.; Xie, H. A Systematic Taxonomy for Performance Shaping Factor. China Saf. Sci. J. 2010, 20, 20–25. (In Chinese) [Google Scholar]
- Liu, Y. Research and Design Optimization of Intelligent Lighting Based on Metro Station. Master’s Thesis, Beijing University of Civil Engineering and Architecture, Beijing, China, 2019. (In Chinese). [Google Scholar]
- Yin, P.; Huang, B.; Liu, Z. Analysis of Noise Characteristics in Helicopter Cabin. Helicopter Tech. 2019, 202, 28–31. (In Chinese) [Google Scholar]
- Nie, M. Noise Control Engineering for Air Separation System in Integrated Gasification Combined Cycle(IGCC) Power Plant. China Environ. Prot. Ind. 2019, 10, 28–31. (In Chinese) [Google Scholar]
- Wang, C.; Jiao, X.; Chen, X. Research and Practice in Space Ergonomics. Space Med. Med. Eng. 2018, 31, 172–181. (In Chinese) [Google Scholar]
- Ma, H.; Liu, Z.; Tian, Y. Analysis of Alertness and Diumal Rhythms in Astronauts before and after An Orbital Mission. Space Med. Med. Eng. 2017, 30, 391–395. (In Chinese) [Google Scholar]
- Wang, Z.; Tang, X.; Liu, W. Review of On-orbit Sleep and Its Effects on Cognition of Astronauts. Space Med. Med. Eng. 2018, 31, 85–90. (In Chinese) [Google Scholar]
- Wang, J.; Qin, H.; Tian, L. Research and Practice of Space Psychology. Space Med. Med. Eng. 2018, 31, 163–171. (In Chinese) [Google Scholar]
- Knoblich, G.; Ohlsson, S.; Raney, G.E. An eye movement study of insight problem solving. Mem. Cogn. 2001, 29, 1000–1009. [Google Scholar] [CrossRef] [PubMed]
- Zhou, B.; Chen, S.; Liu, Y. An Integrated Simulation Platform for Human Factors Analysis of Astronaut Space Operations. Space Med. Med. Eng. 2014, 27, 199–204. (In Chinese) [Google Scholar]
- Yi, X. Relationship between Mental Fatigue and Human Error. In Man-Machine-Environment System Engineering Professional Committee of Chinese Society of Systems Engineering, Proceedings of the 12th Man-Machine-Environment System Engineering Conference, Beijing, China, 2012; Beijing kecui Man-Machine-Environment System Engineering Technology Research Institute: Beijing, China, 2012; pp. 107–110. (In Chinese) [Google Scholar]
- Liu, H.; Gu, Z.; Kang, L. New development of foreign path dependence theory. Econ. Perspect. 2012, 4, 111–116. (In Chinese) [Google Scholar]
- Mahoney, J. Path dependence in historical sociology. Theory Soc. 2000, 29, 507–548. [Google Scholar] [CrossRef]
- David, I.; Harold, G.; Blackman, S.; Lon, N.; Karen, H.; Seidler, S.; Heidi, A.H. INTENT: A method for estimating human error probabilities for decision based errors. Reliab. Eng. Syst. Saf. 1992, 35, 127–136. [Google Scholar]
- Zhou, H. Mental health and accident prevention of nuclear power plant operators. Nucl. Saf. 2004, 2, 37–42. (In Chinese) [Google Scholar]
- Song, J.; Wen, L.; Wang, J. A Similarity Measure for Process Models Based on Task Occurrence Relations. J. Comput. Res. Dev. 2017, 54, 832–843. (In Chinese) [Google Scholar]
- Zhang, X. Research on Semantic Inference based Knowledge Similarity and Contradiction Detection. Master’s Thesis, Shanghai Jiao Tong University, Shanghai, China, 2011. (In Chinese). [Google Scholar]
- Ma, L. Reliability Design Based on Abnormal Operation of Driver Controller. Technol. Mark. 2018, 25, 59–61. (In Chinese) [Google Scholar]
- Xia, C.; Yan, S.; Li, Q.; Liu, Y. Experimental Study on Human-machine Interface Evaluation of Main Control Room in Nuclear Power Plants. China Saf. Sci. J. 2008, 18, 109–114. (In Chinese) [Google Scholar]
- Peng, L.; Qiu, Y.; Hu, J.; Tong, J.; Zhao, J.; Li, Z. Expert Judgments for Performance Shaping Factors Multiplier Design in Human Reliability Analysis. Reliab. Eng. Syst. Saf. 2019, 194, 106343. [Google Scholar] [CrossRef]
- Xie, L. VC Firm Performance Evaluation and Incentive Mechanism-Based on BR Firm. Master’s Thesis, Zhejiang University, Hangzhou, China, 2018. (In Chinese). [Google Scholar]
- Du, J. Research on Fuzzy Comprehensive Evaluation of Tacit Knowledge Management Performance of Engineering Projects. Master’s Thesis, Xihua University, Chengdu, China, 2018. (In Chinese). [Google Scholar]
- Yu, B. Evaluation and Countermeasures of safety behavior ability of underground workers in coal mine. Master’s Thesis, Anhui University of Science & Technology, Huainan, China, 2018. (In Chinese). [Google Scholar]
- Yan, L. Research on Employee Performance Evaluation of AT Education and Training Company. Master’s Thesis, Guangdong University of Finance & Economics, Guangzhou, China, 2017. (In Chinese). [Google Scholar]
- Zhao, N. Study on Evaluation of Comprehensive Performance of the Coal Enterprises Based on AHP and BP Neural Netw ork. Master’s Thesis, China University of Geosciences, Wuhan, China, 2018. (In Chinese). [Google Scholar]
- Li, Z. Scheme Comparison of Seepage Control for The Reservoir Basin of Pumped Storage Power Station Based on AHP Fuzzy Comprehensive Evaluation Method. Master’s Thesis, Xi’an University of Technology, Xi’an, China, 2018. (In Chinese). [Google Scholar]
- Huang, X. Research on Continuous Evaluation System of s Automobile Company Based on Balanced Scorecard. Master’s Thesis, Xi’an Shiyou University, Xi’an, China, 2018. (In Chinese). [Google Scholar]
- Zhang, B.; Xu, S.; Sun, Y. The Application of Fuzzy Comprehensive Evaluation Method Based on AHP in Evaluation of Property Service Quality. J. Huaiyin Inst. Technol. 2021, 30, 94–100. (In Chinese) [Google Scholar]
- Wang, J.; Jin, C.; Gong, L.; Zhang, X. Risk assessment of railway tunnel collapse based on variable fuzzy set theory. J. Railw. Sci. Eng. 2021, 18, 1364–1372. (In Chinese) [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| First-Level Indicator | Symbol | Second-Level Indicator | Symbol | Remark |
|---|---|---|---|---|
| Task conflict | B1 | Safety risk at the initial position | B11 | The possibility of a safety risk at a similar initial position, present in some cases (e.g., collision) and not in other cases. |
| Degree of delay | B12 | Presence/absence of delay in the display of the operational effect | ||
| Similarity of operation mode | B13 | Operation action elements, manual or touch-screen operation, etc. | ||
| Information display | B14 | Display of the attitude and position information | ||
| Equipment fault and deterioration | B2 | Joystick | B21 | Fault or functional deterioration of the joystick |
| Display | B22 | Fault or functional deterioration of the display | ||
| Extravehicular camera | B23 | Fault or functional deterioration of the extravehicular camera | ||
| Environmental impact [17,18] | B3 | Noise [17,19,20] | B31 | In general, noise is ubiquitous, and moderate noise has little impact on an operator. However, for some task scenarios, excessive ambient noise may have an important impact on the behavioral performance of an operator. |
| Illumination | B32 | The illumination in the main control room affects, to some extent, the operation of an astronaut. Too much or too little light can cause eye discomfort and distract the astronaut. | ||
| Temperature [17] | B33 | Temperature mainly refers to the influence of temperature change in the cabin on the operator. | ||
| Human factors | B4 | Changes in cognitive and operational abilities [21,22,23,24,25,26] | B41 | In ground-based simulations and in-orbit flying missions, astronauts’ operational abilities in terms of perception (visual perception, haptic feedback, and auditory perception), mobility, accessibility, maneuverability, and strength characteristics may differ under the influence of the space environment. |
| Level of experience [12,17,18,27,28,29,30,31] | B42 | The level of experience represents the extent to which an astronaut understands and is familiar with software and hardware equipment and task operation regulations and procedures, as well as the experience in dealing with equipment anomalies and emergencies. An experienced operator can quickly capture critical information from the system, complete relevant operations, and select the correct coping strategies and methods. | ||
| Physical fatigue [17,30] | B43 | Physical fatigue mainly refers to bodily fatigue and is primarily caused by prolonged body load and influenced by factors such as sleep duration and quality. This parameter is typically characterized by the inability to sustain loads with repeated activities. In terms of an operator’s physiological condition, physical fatigue mainly includes individual physiological factors such as physiological fatigue, physiological rhythms, and physical conditions. | ||
| Psychological pressure [27,32,33,34,35,36] | B44 | Equipment anomalies can make an astronaut feel nervous or stressed. Psychological pressure is a major factor affecting human behavior and reliability. | ||
| Mental fatigue [12,17,27,29,30] | B45 | Primarily refers to central fatigue, which typically stems from a diminished capacity for behavioral activity caused by prolonged engagement in stressful mental work or by abnormal environmental stimuli and is influenced by the environmental atmosphere, pressure, emotions, and mental load. This parameter is typically characterized by unwillingness or inability to perform an activity. | ||
| Mental workload [9,10] | B46 | Primarily refers to describe people’s information processing ability at work. |
| Influencing Factor | Initial Influencing Factors | Statistics Results of Expert Opinions (Seven Experts in Total) | Average of Relative Importance | Influencing Factors and Description to be Eliminated | ||
|---|---|---|---|---|---|---|
| Agree (Number of Experts) | Disagree (Number of Experts) | Can’t Judge (Number of Experts) | ||||
| Task conflict | Safety risk at the initial position | 6 | 0 | 1 | 18.8 | The red indicator indicates the indicator to be eliminated. The reason for elimination is that the average value of relative importance is low and there are great differences in expert opinions. |
| Degree of delay | 7 | 0 | 0 | 19.2 | ||
| Similarity of operation mode | 3 | 3 | 1 | 11.3 | ||
| Information display | 5 | 1 | 1 | 19.1 | ||
| Equipment fault and deterioration | Joystick | 7 | 0 | 0 | 19.8 | |
| Display | 4 | 2 | 1 | 12.5 | ||
| Extravehicular camera | 6 | 0 | 1 | 18.8 | ||
| Environmental impact | Noise | 7 | 0 | 0 | 19.5 | |
| Illumination | 7 | 0 | 0 | 19.7 | ||
| Temperature | 4 | 3 | 0 | 11.7 | ||
| Human factors | Changes in cognitive and operational abilities | 6 | 0 | 1 | 18.6 | |
| Level of experience | 7 | 0 | 0 | 20.1 | ||
| Physical fatigue | 7 | 0 | 0 | 19.6 | ||
| Psychological pressure | 7 | 0 | 0 | 20.2 | ||
| Mental fatigue | 7 | 0 | 0 | 20.7 | ||
| Mental workload | 4 | 2 | 1 | 14.0 | ||
| Influencing Factors of “Task Conflict” | Influencing Factors of “Equipment Fault and Deterioration” | Influencing Factors of “Environmental Impact” | Influencing Factors of “Human Factors” |
|---|---|---|---|
| Safety risk at the initial position | Joystick | Noise | Changes in cognitive and operational abilities |
| Degree of delay | Extravehicular camera | Illumination | Level of experience |
| Information display | Physical fatigue | ||
| Psychological pressure | |||
| Mental fatigue |
| Value Range of d(taski)fac | Grade |
|---|---|
| (0, 40] | Low |
| (40, 80] | Medium |
| (80, 100] | High |
| Value Range of |d(taski)inh| | Grade |
|---|---|
| (0, 40] | Low |
| (40, 80] | Medium |
| (80, 100] | High |
| Method | Description | Advantages | Disadvantages |
|---|---|---|---|
| Balanced score card | The performance is evaluated in four dimensions: finance, customer, internal process, and learning and growth. | The method is in line with the principle of combining financial and nonfinancial evaluations and is capable of avoiding the short-term behavior of an enterprise. | A relatively large number of indicators are required, so it is difficult to assign weights to the indicators. |
| Neural network model | A function describing the influence of the evaluation indicators on the evaluation object is fitted through self-learning with a certain number of reliable samples, stabilized through training with multiple samples, and finally used to evaluate the selected evaluation object. | There is no need to assign weights to indicators. The system automatically stabilizes through sample data analysis. | A sufficiently large number of samples is needed to obtain an influence function with a satisfactory goodness of fit. The method is applicable to problems with extensive sample data. |
| Fuzzy comprehensive evaluation | Factors with unclear boundaries that are difficult to quantity are quantified by applying the principle of fuzzy relation synthesis based on fuzzy mathematics. The grade of the membership of the evaluated object is comprehensively evaluated using multiple factors. | The evaluated object has a unique evaluation value that is not affected by the object set in which the evaluated object is located. | The assignment of weights to indicators is highly subjective. This method is suitable for an evaluation system that is highly subjective with many uncertain factors. |
| Critical incident method | The most and least important task behaviors are documented, and their most positive and most negative effects on departmental performance are categorized, documented, and evaluated. | The evaluation can be carried out throughout the whole process and is convenient and easy to implement. | Documentation and observation of critical incidents are time- and energy-consuming. This method does not allow quantitative analysis, is unable to specifically differentiate the level of importance of work behaviors, and cannot compare employees well. |
| Linear weighting method | This is an evaluation function method that assigns weight coefficients to objectives according to their importance and then linearly combines these coefficients to obtain the evaluation value. | The method involves only simple calculations that are easy to understand, and includes all the indicator variables of raw data, making it especially suitable for problems with numerical variables. | This method is unable to reflect the prominent influence of some evaluation indicators. |
| Operation standard method | The performance of employees is evaluated according to preset standards and indicators. | This method is mainly suitable for intensive production work and has clear standards. | There is uncertainty in the reasonableness of the standards. |
| First-Level Indicator | Second-Level Indicator | Level of Effect |
|---|---|---|
| Task conflict (B1) | Safety risk at the initial position (B11) | No risk, low risk, medium-to-high risk |
| Delay (B12) | No delay, normal delay, severe delay | |
| Information display (B14) | Clear and reasonable, basically clear and reasonable, no display | |
| Equipment fault and deterioration (B2) | Joystick (B21) | No fault or deterioration, slight fault or deterioration, severe fault or deterioration |
| Extravehicular camera (B23) | No fault or deterioration, slight fault or deterioration, severe fault or deterioration | |
| Environmental impact (B3) | Noise (B31) | No noise, soft noise, loud noise |
| Illumination (B32) | Comfortable, slightly uncomfortable, uncomfortable | |
| Human factors (B4) | Changes in cognitive and operational abilities (B41) | Large, medium, small |
| Level of experience (B42) | High, medium, low | |
| Physical fatigue (B43) | Very fatigued, fair, not fatigued | |
| Psychological pressure (B44) | High, medium, low | |
| Mental fatigue (B45) | Very fatigued, fair, not fatigued |
| Second-Level Indicator | Weight | ||
|---|---|---|---|
| AHP Method | G2 Method | Combination Weighting Method Based on Game Theory. | |
| Safety risk at the initial position (B11) | 0.0925 | 0.0856 | 0.0875 |
| Delay (B12) | 0.0939 | 0.0957 | 0.0952 |
| Information display (B14) | 0.1008 | 0.0783 | 0.0813 |
| Joystick (B21) | 0.1001 | 0.0827 | 0.0876 |
| Extravehicular camera (B23) | 0.0873 | 0.0931 | 0.0915 |
| Noise (B31) | 0.0523 | 0.0898 | 0.0793 |
| Illumination (B32) | 0.0523 | 0.0415 | 0.0446 |
| Changes in cognitive and operational abilities (B41) | 0.1092 | 0.0943 | 0.0985 |
| Level of experience (B42) | 0.1186 | 0.1474 | 0.1393 |
| Physical fatigue (B43) | 0.0525 | 0.0632 | 0.0602 |
| Psychological pressure (B44) | 0.0723 | 0.0629 | 0.0655 |
| Mental fatigue (B45) | 0.0680 | 0.0653 | 0.0661 |
| Serial Number of the Grade Values of the Influencing Factors | The First Row of Each Membership Matrix (of the Levels of Impact Factors Are Good, Fair and Poor, Respectively) | DOF Evaluation Value |
|---|---|---|
| 1 | 1, 0, 0 | 20 |
| 2 | 0.8, 0.2, 0 | 28 |
| 3 | 0.8, 0.1, 0.1 | 32 |
| 4 | 0.8, 0, 0.2 | 36 |
| 5 | 0.5, 0.5, 0 | 40 |
| 6 | 0.5, 0.4, 0.1 | 44 |
| 7 | 0.5, 0.3, 0.2 | 48 |
| 8 | 0.5, 0.2, 0.3 | 52 |
| 9 | 0.5, 0.1, 0.4 | 56 |
| 10 | 0.5, 0, 0.5 | 60 |
| 11 | 0.3, 0.3, 0.4 | 64 |
| 12 | 0.3, 0.2, 0.5 | 68 |
| 13 | 0.2, 0.3, 0.5 | 72 |
| 14 | 0.2, 0.2, 0.6 | 76 |
| 15 | 0.1, 0.3, 0.6 | 80 |
| 16 | 0.1, 0.2, 0.7 | 84 |
| 17 | 0, 0.3, 0.7 | 88 |
| 18 | 0, 0.2, 0.8 | 92 |
| 19 | 0, 0.1, 0.9 | 96 |
| 20 | 0, 0, 1 | 100 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xiao, Y.; Jiang, J.; Yang, D.; Li, J.; Wu, J.; Chen, Y. Research on Mechanism and Measurement Model for the Effects of Path Dependence on Human Error in Space Station Manipulator Tasks. Symmetry 2022, 14, 753. https://doi.org/10.3390/sym14040753
Xiao Y, Jiang J, Yang D, Li J, Wu J, Chen Y. Research on Mechanism and Measurement Model for the Effects of Path Dependence on Human Error in Space Station Manipulator Tasks. Symmetry. 2022; 14(4):753. https://doi.org/10.3390/sym14040753
Chicago/Turabian StyleXiao, Yi, Jianjun Jiang, Dan Yang, Jiaxuan Li, Jintao Wu, and Yang Chen. 2022. "Research on Mechanism and Measurement Model for the Effects of Path Dependence on Human Error in Space Station Manipulator Tasks" Symmetry 14, no. 4: 753. https://doi.org/10.3390/sym14040753