Abstract
The non-axisymmetric problem of frictionless contact between an isotropic elastic half-space and a cylindrical punch with an arbitrarily shaped base is considered. The contact problem is formulated as a two-dimensional Fredholm integral equation of the first type in a fixed circular domain with the right-hand side being representable in the form of a Fourier series. A number of general solutions of the contact problem, which were published in the literature, are discussed. Based on the Galin–Mossakovskii general solution, new formulas are derived for the particular value of the contact pressure at the contact center and the contact stress-intensity factor at the contour of the contact area. Since the named general solution does not employ the operation of differentiation of a double integral with respect to the coordinates that enter it as parameters, the form of the general solution derived by Mossakovskii as a generalization of Galin’s solution for the special case, when the contact pressure beneath the indenter is bounded, is recommended for use as the most simple closed-form general solution of the non-axisymmetric Boussinesq contact problem.
1. Introduction
The contact mechanics dates back to Hertz (1882), who developed the theory of unilateral frictionless local contact for two elastic bodies, which in the unloaded state are shaped as elliptic paraboloids in the vicinity of the point of initial contact, and Boussinesq (1885), who solved the problem of contact between an elastic half-space and a frictionless flat-ended cylindrical punch. Since then, particular progress has been made with regard to solving the axisymmetric frictionless problems with a circular area of contact.
While in the literature, the general solution of the axisymmetric problem is usually associated with Sneddon’s paper [1] of 1965, different authors give the priority to other studies. In particular, in his comprehensive review, Borodich [2] highlighted the contribution made by Galin (1946); Barber [3] in his book referred to the general solution as the Green and Collins solution; in their historical note [4] (see also [5]), Popova and Popov, acknowledging the contributions made by Galin and Sneddon, put under a spotlight the original paper [6] written in German by Schubert in 1942. However, for the sake of historical truth, it should be underlined that (to the best of the author’s knowledge) the priority of solving the axisymmetric frictionless contact problem with a circular contact area belongs to Leonov’s paper [7] published in Russian in 1939. As it was shown by Argatov and Dmitriev [8], other forms of the general solution follow from Leonov’s results by the simple change of integration variables. As a compromise, Argatov and Mishuris [9] suggested to call the general solution of the axisymmetric frictionless contact problem the Galin–Sneddon solution.
The general solution of the non-axisymmetric contact problem for a cylindrical indenter is of great importance in developing the contact stiffness indentation tomography technique [10,11]. Another example of the application of the general solution is given by the problem of adhesive contact under non-symmetric perturbation of the contact geometry [12]. Generally speaking, the general solutions collected below will be useful in solving the frictionless contact problems with a circular area of contact (e.g., with applications in geotechnics [13,14]), when the symmetry of the contact geometry does not matter.
Whereas axisymmetric contact problems are considered in many publications, including textbooks [3,8] and handbook [15], the situation with the non-axisymmetric contact problem with a circular area of contact is not so equivocal, even in spite of the fact that this problem is a direct generalization of the Boussinesq problem for a cylindrical punch with a non-flat base. This paper aims to bridge this gap by comparing different general solutions published in the literature.
The main motivation for writing this reviewer paper was to identify in a sense the simplest closed form of the general solution. Another quite utilitarian motivation was to collect in one compendium the practically useful results, some of which are not readily accessible. Herein, we compare only the solutions collected from the literature, and the discussion of the methods of their derivations falls outside the scope of the present study. The recent paper [16] on solving Keer’s indentation problem for a cylindrical indenter with the face in a wedge form can be regarded as a case study for the use of the general solutions.
2. General Solutions of the Frictionless Non-Axisymmetric Contact Problem
2.1. The Boussinesq Contact Problem Formulation
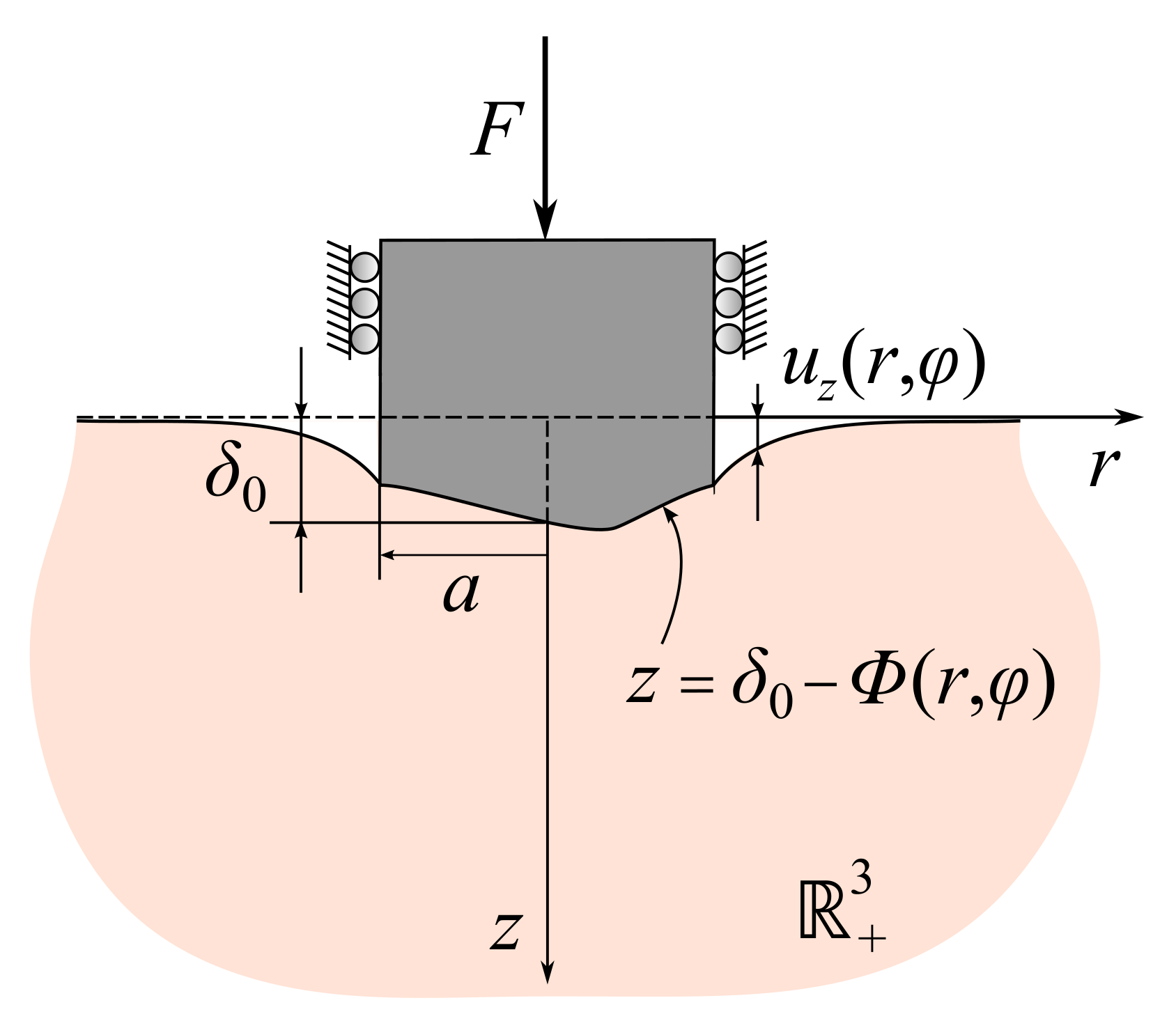
We consider the so-called Boussinesq contact problem for an isotropic elastic half-space (see Figure 1), which is indented by a frictionless cylindrical punch of radius a with a non-flat base described by a continuous shape function, . For the sake of simplicity we assume that the center of cylindrical coordinates is taken at the center of the circular area of contact, and the elastic semi-infinite body occupies the half-space .
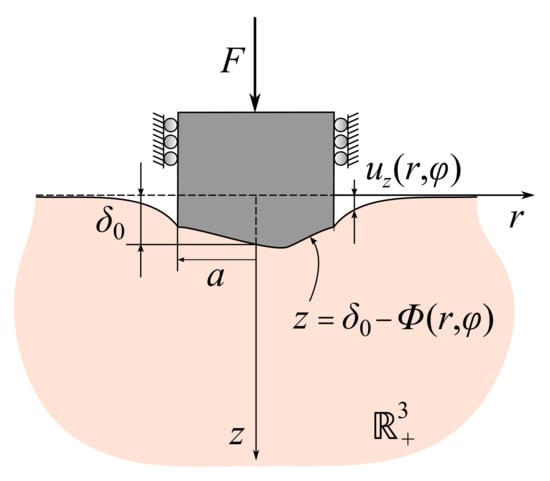
Figure 1.
A schematic of the non-axisymmetric Boussinesq contact problem with a circular area of contact.
Let us assume that the shape function admits the Fourier series representation
where
Since the function is assumed to be continuous, it can be shown that . In addition, we put
Further, let denote the contact pressure exerted by the punch under the action of an external load, F. Then, the condition of static equilibrium implies that
According to the Boussinesq solution of the problem of normal loading of an elastic half-space, the contact pressure produces the following normal surface displacement field:
Here, is the reduced elastic modulus, E and are Young’s modulus and Poisson’s ratio of the elastic semi-infinite body, are coordinates of the point of observation, and are coordinates of the point of integration.
Inside the contact area, the normal surface displacements are determined by the shape of the punch, which under the applied load receives some vertical (normal) displacement, , such that
The integral Equation (7) is called the governing integral equation of the Boussinesq contact problem with the circular contact area of radius a. It is to emphasize that in contrast to the Hertz contact problem, where the contact area is determined from the condition of vanishing of the contact pressure on the contour of the contact area, in the Boussinesq contact problem, the contact area is assumed to be a priori fixed. Correspondingly, the contact pressure density , which solves Equation (7), may possess a singularity at the contact contour, as the point of observation approaches the contact contour, when .
We note that a rigid body, by means of which external loads are transferred to the surface of an elastic body, is usually called an indenter. Here we prefer the term `punch’, as the term `indenter’ (in many cases) assumes unilateral contact, when only positive contact pressures are allowed inside the contact area.
Finally, we note that, in view of (3), the parameter has the exact meaning of the normal surface displacement at the center of the contact area. If for any and , then in the unloaded state, the punch touches the surface of the elastic half-space at the center of the coordinates, and therefore, the parameter can be interpreted as the displacement of the punch under the applied load F. Provided that the punch shape function is known, the equilibrium Equation (4) establishes a relation between the contact force F and the punch displacement .
Remark 1.
It is pertinent to note here that to have an axisymmetric displacement in the Boussinesq problem, the indenter shape should be axisymmetric. However, an axisymmetric shape of the indenter in unilateral contact does not necessarily imply that the established axisymmetric contact region is circular (see, for example, [17,18]), where indenters of toroidal-type shapes produce an annular contact region, or [19], where the contact region under a non-convex parametric–homogeneous punch is composed from a central circular part and a number of concentric annular regions). On the other hand, the Boussinesq contact problem with a circular area of contact will be non-axisymmetric if the indenter shape function essentially depends on the angular coordinate φ, that is, if the Fourier series (9) contains at least one nontrivial term starting from .
2.2. Copson’s Series Solution
According to Copson (1947), the coefficients of the Fourier series (11) are determined by the following formulas [20]:
where
2.3. Mossakovskii’s Series Solution
Under the assumption that the functions , , and are continuously differentiable in the interval , Mossakovskii (1953) simplified Formulas (12) and (13) as follows [21]:
Here, the constant is given by the formulas
2.4. Leonov’s Closed-Form Solution
Let denote the two-dimensional Laplace differential operator, that is
The general solution to the governing integral Equation (7) in a closed form was first obtained by Leonov (1955). To simplify the writing of his formula, we introduce the notation
By the definition, R equals the distance between the point of observation and the point of integration .
So, according to Leonov, the general solution is given by the following formula [22]:
We note that .
2.5. Mossakovskii’s Form of the General Solution
Starting from the series solution (11)–(13), Mossakovskii (1953) derived the following general solution in the following form [23]:
We note that .
2.6. The Galin–Mossakovskii General Solution
We recall that the zeroth term of the Fourier series (9) is defined by the formula
As a generalization of the general solution obtained by Galin [24], for the special case, when the contact pressure beneath the indenter is bounded, Mossakovskii (1953) derived the following formula [23]:
We note that, in view of (21), gives the average value of the function on a circumference of radius r. That is why, if is a continuous function, then coincides with the limit of as .
2.7. Fabrikant’s General Solutions
Let us introduce the notation
where
We note that Formula (23) defines the -operator [25] that acts on the function , defined on a unit circle.
Moreover, we put
According to Fabrikant (1986), the general solution to the governing integral equation of the contact problem under consideration (7), in view of the notation (8), can be represented in the following closed form [25]:
Another form of the Fabrikant solution is given by the following formula:
Yet, another form of the Fabrikant solution is given
It is pertinent to note here that in terms of the operator, the Mossakovskii solution (20) can be represented as follows [26]:
3. Contact Pressure at the Center of Circular Contact
For the Fourier series representation (21), it follows that
When comparing the series solutions due to Copson (12), (13) and Mossakovskii (14), (15), it is readily seen that only the Mossakovskii series solution allows to evaluate directly the right-hand side of Equation (30).
By changing the order of integration, we easily transform Formula (31) as follows:
Here, , and is given by (15). We also note that the integrand in (32) can be further transformed, using the trigonometric formulas
Finally, we recall that the function is defined by Formula (21).
Now, when comparing the closed-form solutions due to Leonov (19), Mossakovskii (20), and Fabrikant (26) with the Galin–Mossakovskii solution (22) and the Fabrikant solutions (27) and (28), we conclude that only the latter three formulas allow to evaluate directly the contact pressure at the contact center.
By setting in the Galin–Mossakovskii formula (22), we readily obtain
By taking into account (15) and (21), it can be easily verified that Formulas (32) and (33) are in complete agreement, and they can be rewritten as
where is defined by Formula (21).
Now, by setting in the Fabrikant solution (27), we obtain
The first term on the right-hand side of Equation (35) can be simplified as follows:
4. Contact Stress Intensity Factor
We define the stress-intensity factor (SIF) of the contact stresses as follows:
It is to note that the normal stress produced by the punch on the surface points inside the contact area is equal to . It also is worth noting that the contact SIF analysis under a circular punch was considered recently in [16].
4.1. Borodachev’s Formula for the Contact SIF
By using the Fabrikant solution (28), Borodachev (1991) derived the following closed-form result [27]:
It is warned that different normalizations can be used in the definition of the SIF.
4.2. Fabrikant’s Formula for the Contact SIF
By utilizing his general solution (26) and the general property
4.3. A New Formula for the Contact SIF
Observe that the general solutions (19) and (20) given by Leonov and Mossakovskii contain the application of the Laplace differential operator to the double integral, and therefore, the direct usage of Formula (39) for evaluating the contact SIF is impossible. On the other hand, the Galin–Mossakovskii solution (22) employs the operation of differentiation only under the integral sign.
Let us assume that the function is twice continuously differentiable over the closed circle , . Then, it can be shown (see Appendix A) that the third term on the right-hand side of Equation (22) is not singular at the contact contour. Hence, from Equations (22) and (39), it follows that
5. Discussion
First, we observe that all general solutions considered above make use of both the operations of integration and differentiation. From the computational point of view, it is preferable to avoid differentiating integrals with respect to parameters. That is why, Mossakovskii’s series solution (14)–(16) is, in this sense, better than Copson’s series solution (12) and (13).
Among the closed-form general solutions, a special interest represents the Galin–Mossakovskii solution (22), since all differentiations are performed under the integral sign. Moreover, in Formula (22), all operations of differentiation are applied directly to the function , and thus, are equivalent to differentiating the shape function of the punch .
Of note, Fabrikant’s solutions (26), (27) and (28) are given by in terms of the -operator, and their effective application requires the knowledge of its properties (for instance, ).
Another important point to note is the apparent singularity of the Leonov and Mossakovskii general solutions, as each of the terms on the right-hand sides of Equations (19) and (20), generally speaking, has a singularity of the order as . At the same time, the sought-for solution of Equation (7), generally speaking, should possess the square root singularity, that is, the singularity of the order as . This means that the higher-order singularity terms should cancel each other.
It is necessary to note here that the general solutions outlined above hold true in a more general case of a transversely isotropic elastic half-space, provided that the plane of isotropy is parallel to the half-space surface (see, for example, [9]). The potential for further generalization and development of the general solutions presented above relies on the fact that the problem of elastic contact is a core issue in similar contact problems with a circular contact region for functionally graded [29,30], viscoelastic [31,32], thermoelastic [33,34], poroelastic [35,36], magneto-electro-elastic [37,38], multiferroic [39,40] semi-infinite media as well for elastic semi-infinite media with surface effects [41,42].
The main results of the present paper are given by Formulas (34) and (42), which in view of (8), can be rewritten as follows:
Here, is the angle-averaged shape function, i.e.,
It is of interest to note that, in contrast to formulas due to Borodachev (40) and Fabrikant (41), Formula (44) separates the contributions to the contact SIF from the punch displacement and the punch shape function .
To the best of the author’s knowledge, Formulas (43) and (44) have been reported in the literature for the first time.
The Galin–Mossakovskii general solution is recommended for use as the most simple closed-form general solution of the non-axisymmetric Boussinesq contact problem.
Funding
This research received no external funding.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Acknowledgments
The financial support from the Ba-Yu Scholar program of Chongqing City (China) is gratefully acknowledged. We acknowledge support by the German Research Foundation and the Open Access Publication Fund of TU Berlin.
Conflicts of Interest
The author declares no conflict of interest.
Appendix A. Derivation of the Contact SIF from the Galin–Mossakovskii General Solution
By setting in Equation (22), we can rewrite
where .
Further, by the definition (39), we have
Hence, by substituting (A1) into Formula (A2) and letting tend to zero, we immediately arrive at Formula (42), since the third term on the right-hand side of Equation (A1) is not singular as .
References
- Sneddon, I.N. The relation between load and penetration in the axisymmetric Boussinesq problem for a punch of arbitrary profile. Int. J. Eng. Sci. 1965, 3, 47–57. [Google Scholar] [CrossRef]
- Borodich, F.M. The Hertz-type and adhesive contact problems for depth-sensing indentation. Adv. Appl. Mech. 2014, 47, 225–366. [Google Scholar]
- Barber, J.R. Contact Mechanics; Springer: Dordrecht, The Netherlands, 2018. [Google Scholar]
- Popova, E.; Popov, V.L. History of “Sneddon” solution in contact mechanics. PAMM 2021, 21, e202100048. [Google Scholar] [CrossRef]
- Popova, E.; Popov, V.L. Ludwig Föppl and Gerhard Schubert: Unknown classics of contact mechanics. ZAMM-J. Appl. Math. Mech. Angew. Math. Mech. 2020, 100, e202000203. [Google Scholar] [CrossRef]
- Schubert, G. Zur Frage der Druckverteilung unter elastisch gelagerten Tragwerken. Ing.-Arch. 1942, 13, 132–147. (In German) [Google Scholar] [CrossRef]
- Leonov, M.Y. On the calculation of elastic foundations. PMM J. Appl. Math. Mech. 1939, 3, 53–78. (In Russian) [Google Scholar]
- Argatov, I.I.; Dmitriev, N.N. Fundamentals of the Theory of Elastic Discrete Contact; Polytechnics: St. Petersburg, Russia, 2003. (In Russian) [Google Scholar]
- Argatov, I.; Mishuris, G. Indentation Testing of Biological Materials; Springer: Cham, Switzerland, 2018. [Google Scholar]
- Argatov, I.I.; Sabina, F.J. Contact stiffness indentation tomography: Moduli-perturbation approach. Int. J. Eng. Sci. 2020, 146, 103175. [Google Scholar] [CrossRef]
- Argatov, I.I.; Jin, X.; Keer, L.M. Collective indentation as a novel strategy for mechanical palpation tomography. J. Mech. Phys. Solids 2020, 143, 104063. [Google Scholar] [CrossRef]
- Argatov, I.I. Controlling the adhesive pull-off force via the change of contact geometry. Philos. Trans. R. Soc. A 2021, 379, 20200392. [Google Scholar] [CrossRef]
- Carrier, W.D.; Christiant, J.T. Rigid circular plate resting on a non-homogeneous elastic half-space. Geotechnique 1973, 23, 67–84. [Google Scholar] [CrossRef]
- Boswell, L.F.; Scott, C.R. A flexible circular plate on a heterogeneous elastic half-space: Influence coefficients for contact stress and settlement. Géotechnique 1975, 25, 604–610. [Google Scholar] [CrossRef]
- Popov, V.L.; Heß, M.; Willert, E. Handbook of Contact Mechanics: Exact Solutions of Axisymmetric Contact Problems; Springer Nature: Berlin, Germany, 2019. [Google Scholar]
- Argatov, I. A singularity analysis in Keer’s elastic indentation problem. Mech. Res. Commun. 2022, 121, 103857. [Google Scholar] [CrossRef]
- Barber, J.R. Indentation of the semi-infinite elastic solid by a concave rigid punch. J. Elast. 1976, 6, 149–159. [Google Scholar] [CrossRef]
- Argatov, I.; Li, Q.; Pohrt, R.; Popov, V.L. Johnson–Kendall–Roberts adhesive contact for a toroidal indenter. Proc. R. Soc. A 2016, 472, 20160218. [Google Scholar] [CrossRef]
- Borodich, F.M.; Galanov, B.A. Self-similar problems of elastic contact for non-convex punches. J. Mech. Phys. Solids 2002, 50, 2441–2461. [Google Scholar] [CrossRef]
- Copson, E.T. On the problem of the electrified disc. Proc. Edinb. Math. Soc. 1947, 8, 14–19. [Google Scholar] [CrossRef] [Green Version]
- Mossakovskii, V.I. Pressure of a circular punch on an elastic half-space. Sci. Notes. Inst. Eng. Sci. Autom. 1953, 2, 9–40. (In Russian) [Google Scholar]
- Leonov, M.Y. General problem of pressure of a punch of circular shape in planar projection on an elastic half-space. PMM J. Appl. Math. Mech. 1953, 17, 87–98. (In Russian) [Google Scholar]
- Mossakovskii, V.I. General solution of the problem of determining the pressure under the base of a punch circular in plane with no account for friction. Sci. Notes. Inst. Eng. Sci. Autom. 1953, 2, 41–53. (In Russian) [Google Scholar]
- Galin, L.A. Spatial contact problems of the theory of elasticity for punches of circular shape in planar projection. PMM J. Appl. Math. Mech. 1946, 10, 425–448. (In Russian) [Google Scholar]
- Fabrikant, V.I. A new approach to some problems in potential theory. ZAMM-J. Appl. Math. Mech. Angew. Math. Mech. 1986, 66, 363–368. [Google Scholar] [CrossRef]
- Fabrikant, V.I. Complete solutions to some mixed boundary value problems in elasticity. Adv. Appl. Mech. 1989, 27, 153–223. [Google Scholar]
- Borodachev, N.M. Contact problem for an elastic half-space with a near-circular contact area. Sov. Appl. Mech. 1991, 27, 118–123. [Google Scholar] [CrossRef]
- Fabrikant, V.I. Stress intensity factors and displacements in elastic contact and crack problems. J. Eng. Mech. 1998, 124, 991–999. [Google Scholar] [CrossRef]
- Heß, M. A simple method for solving adhesive and non-adhesive axisymmetric contact problems of elastically graded materials. Int. J. Eng. Sci. 2016, 104, 20–33. [Google Scholar] [CrossRef]
- Argatov, I.I.; Sabina, F.J. Recovery of information on the depth-dependent profile of elastic FGMs from indentation experiments. Int. J. Eng. Sci. 2022, 176, 103659. [Google Scholar] [CrossRef]
- Graham, G.A.C. The correspondence principle of linear viscoelasticity theory for mixed boundary value problems involving time-dependent boundary regions. Q. Appl. Math. 1968, 26, 167–174. [Google Scholar] [CrossRef] [Green Version]
- Itou, H.; Kovtunenko, V.A.; Rajagopal, K.R. The Boussinesq flat-punch indentation problem within the context of linearized viscoelasticity. Int. J. Eng. Sci. 2020, 151, 103272. [Google Scholar] [CrossRef]
- Barber, J. Indentation of an elastic half-space by a cooled flat punch. Q. J. Mech. Appl. Math. 1982, 35, 141–154. [Google Scholar] [CrossRef] [Green Version]
- Krenev, L.I.; Aizikovich, S.M.; Tokovyy, Y.V.; Wang, Y.C. Axisymmetric problem on the indentation of a hot circular punch into an arbitrarily nonhomogeneous half-space. Int. J. Solids Struct. 2015, 59, 18–28. [Google Scholar] [CrossRef]
- Yue, Z.; Selvadurai, A. On the asymmetric indentation of a consolidating poroelastic half space. Appl. Math. Model. 1994, 18, 170–185. [Google Scholar] [CrossRef]
- Selvadurai, A.P.S.; Samea, P. On the indentation of a poroelastic halfspace. Int. J. Eng. Sci. 2020, 149, 103246. [Google Scholar] [CrossRef]
- Fabrikant, V.I. Green’s functions for the magneto-electro-elastic anisotropic half-space and their applications to contact and crack problems. Arch. Appl. Mech. 2017, 87, 1859–1869. [Google Scholar] [CrossRef]
- Chen, J.; Guo, J. Static response of a layered magneto-electro-elastic half-space structure under circular surface loading. Acta Mech. Solida Sin. 2017, 30, 145–153. [Google Scholar] [CrossRef]
- Chen, W.; Pan, E.; Wang, H.; Zhang, C. Theory of indentation on multiferroic composite materials. J. Mech. Phys. Solids 2010, 58, 1524–1551. [Google Scholar] [CrossRef]
- Wu, F.; Li, X.Y.; Chen, W.Q.; Kang, G.Z.; Müller, R. Indentation on a transversely isotropic half-space of multiferroic composite medium with a circular contact region. Int. J. Eng. Sci. 2018, 123, 236–289. [Google Scholar] [CrossRef]
- Zemlyanova, A.Y.; White, L.M. Axisymmetric frictionless indentation of a rigid stamp into a semi-space with a surface energetic boundary. Math. Mech. Solids 2022, 27, 334–347. [Google Scholar] [CrossRef]
- Argatov, I. The surface tension effect revealed via the indentation scaling index. Int. J. Eng. Sci. 2022, 170, 103593. [Google Scholar] [CrossRef]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).