
Dynamic Response of Vibratory Piling Machines for Ground Foundations


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
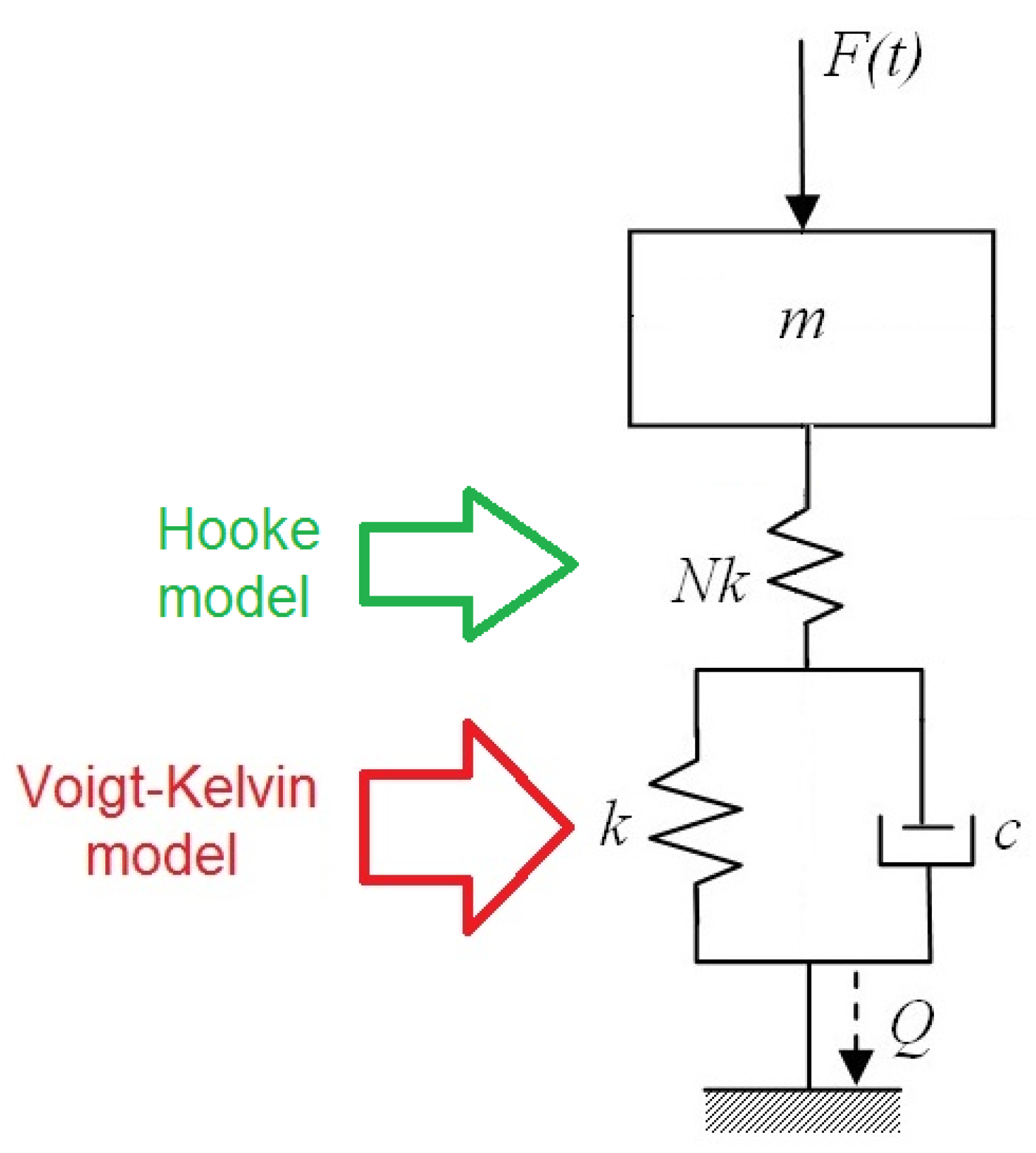
2. Linear Dynamic Model of the Vibratory Piling Machine
2.1. Dynamic Response of the Linear Rheological System
2.1.1. Forced Vibration: Amplitude Displacement in Steady-State Condition
2.1.2. Forced Vibration: Amplitude Displacement in Steady-State Condition
2.1.3. Forced Vibration: Amplitude Displacement in Steady-State Condition
2.2. Dynamic Force Transmitted to the Ground Foundation
2.3. Dynamic Transmissibility Coefficient
2.4. Deflections of the Viscous Dampers in Maxwell–Voigt–Kelvin Model
2.4.1. Deflection of Simple Viscous Damper in Voigt–Kelvin Model
2.4.2. Deflection of Viscous Damper in Maxwell Model
2.5. Dissipated Energy in the Viscous Dampers in Maxwell–Voigt–Kelvin Model
3. Dynamic Parameters Analysis of a Vibratory Piling Machine: Case Study
- the mobile mass of the equipment (incl. pile mass)
- two cases of perturbing force:(1) harmonic force(2) harmonic inertial force ;
- the amplitude of harmonic perturbing force (piling force) ;
- the static moment of the dynamic unbalanced masses (for harmonic inertial force) ;
- discrete variable stiffness ;
- discrete variable viscous damping ;
- discrete multiplier numbers and ;
- perturbing force pulsation (steady-state regime) ;
- damping ratio of the ground foundation .
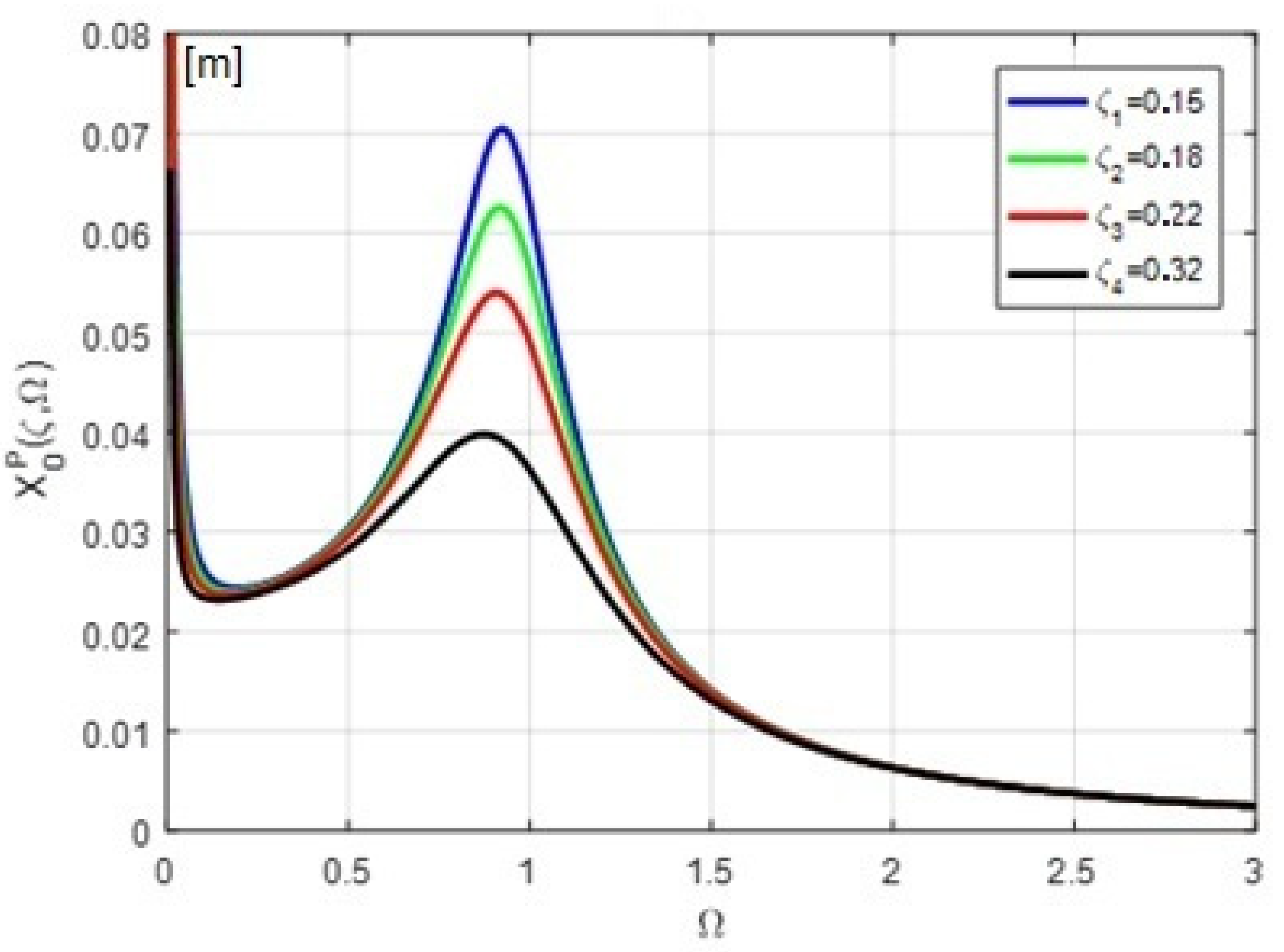
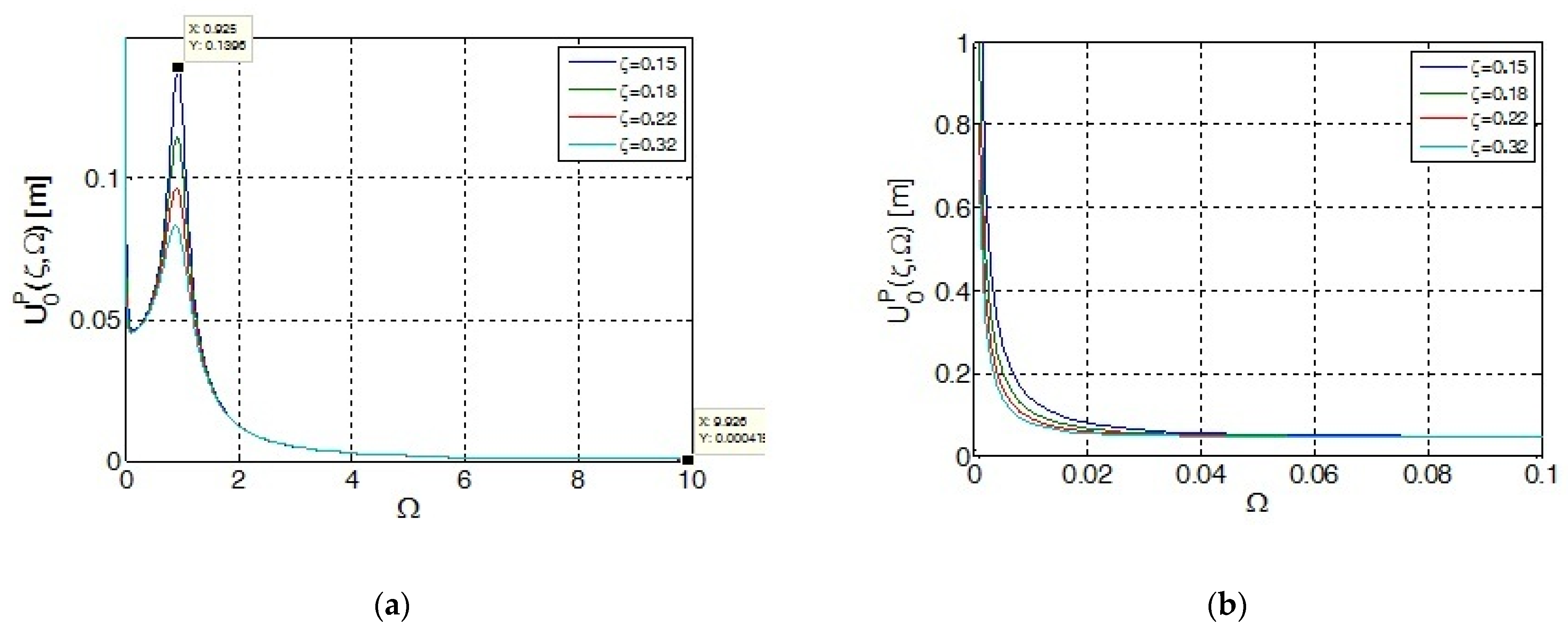
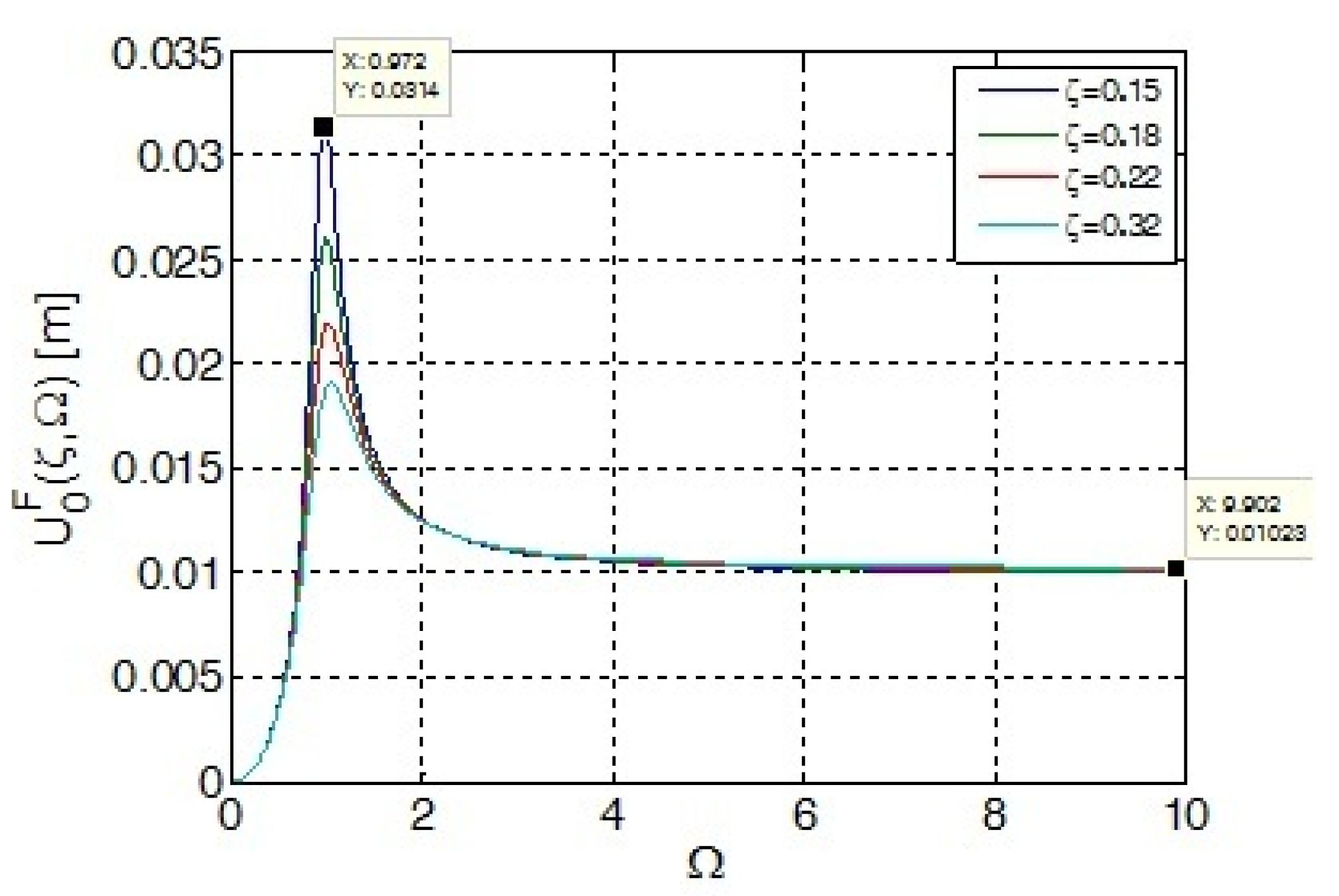
3.1. Amplitude of Steady-State Forced Vibration of Mobile Mass of the Equipment
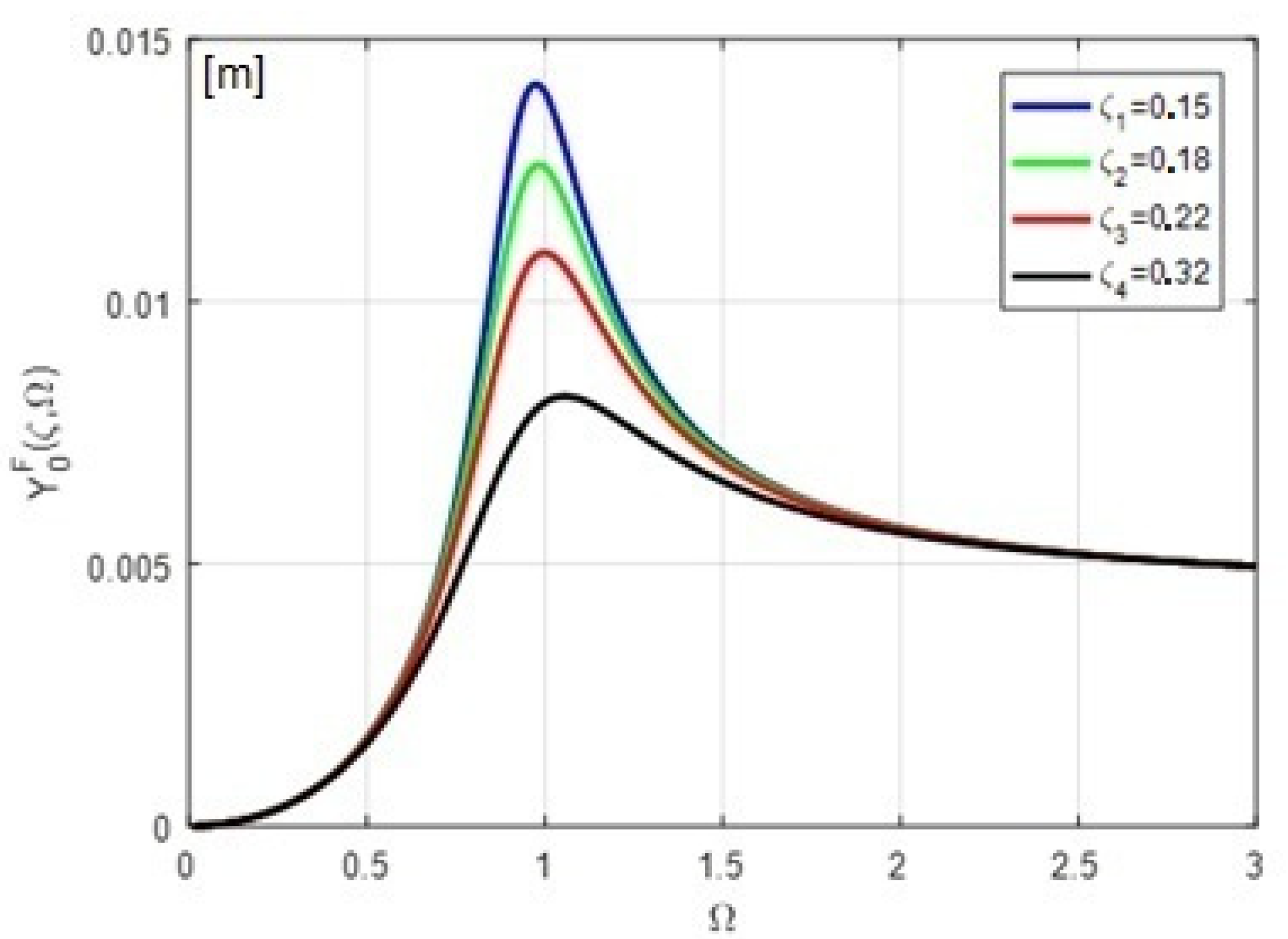
3.2. Amplitude of the Harmonic Deflection in Voigt–Kelvin Model
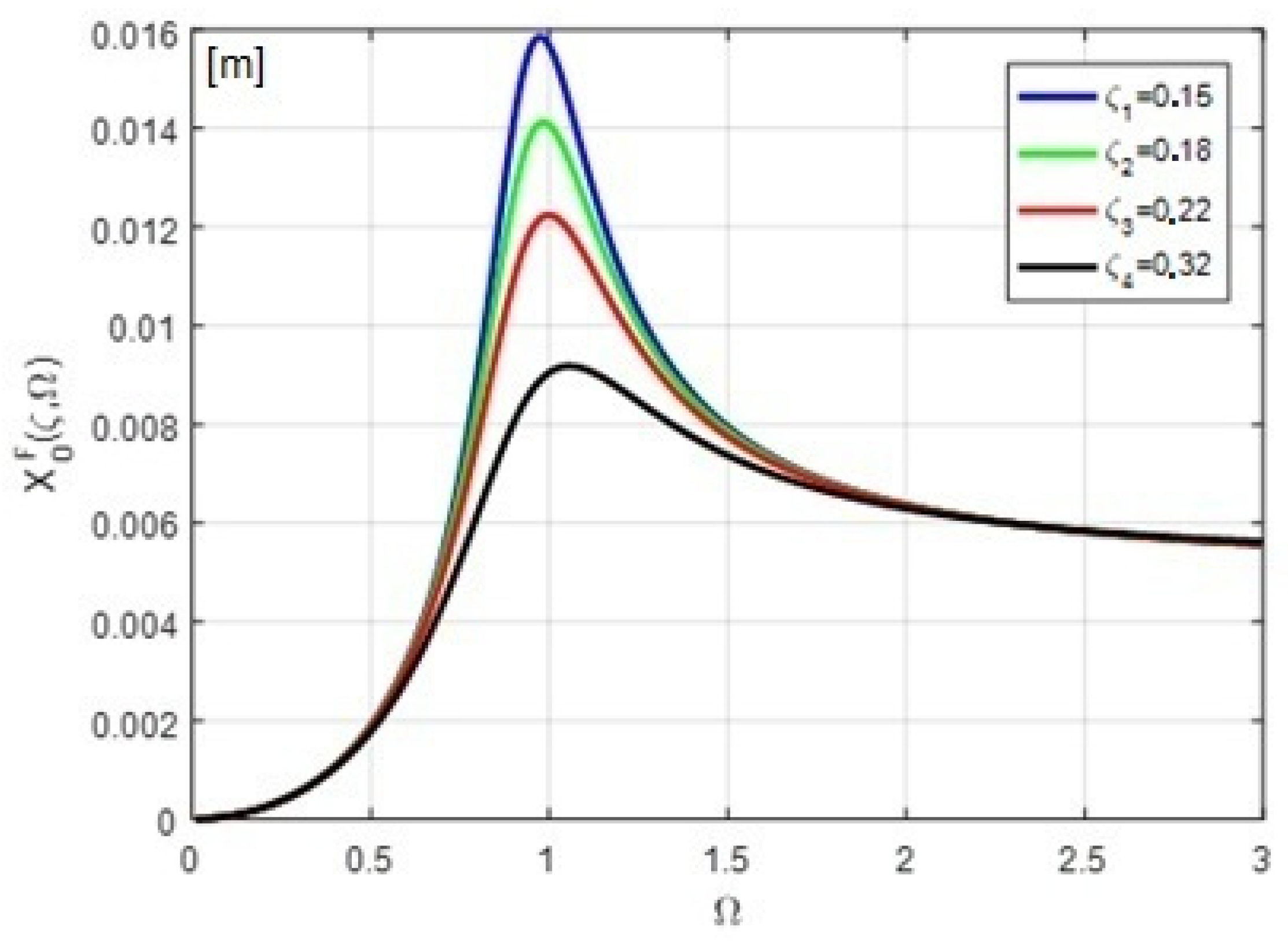
3.3. Amplitude of the Harmonic Variation in the Displacement in Maxwell Model
3.4. Dynamic Coefficient of Transmissibility
3.5. Amplitude of the Harmonic Deflection in Maxwell Model
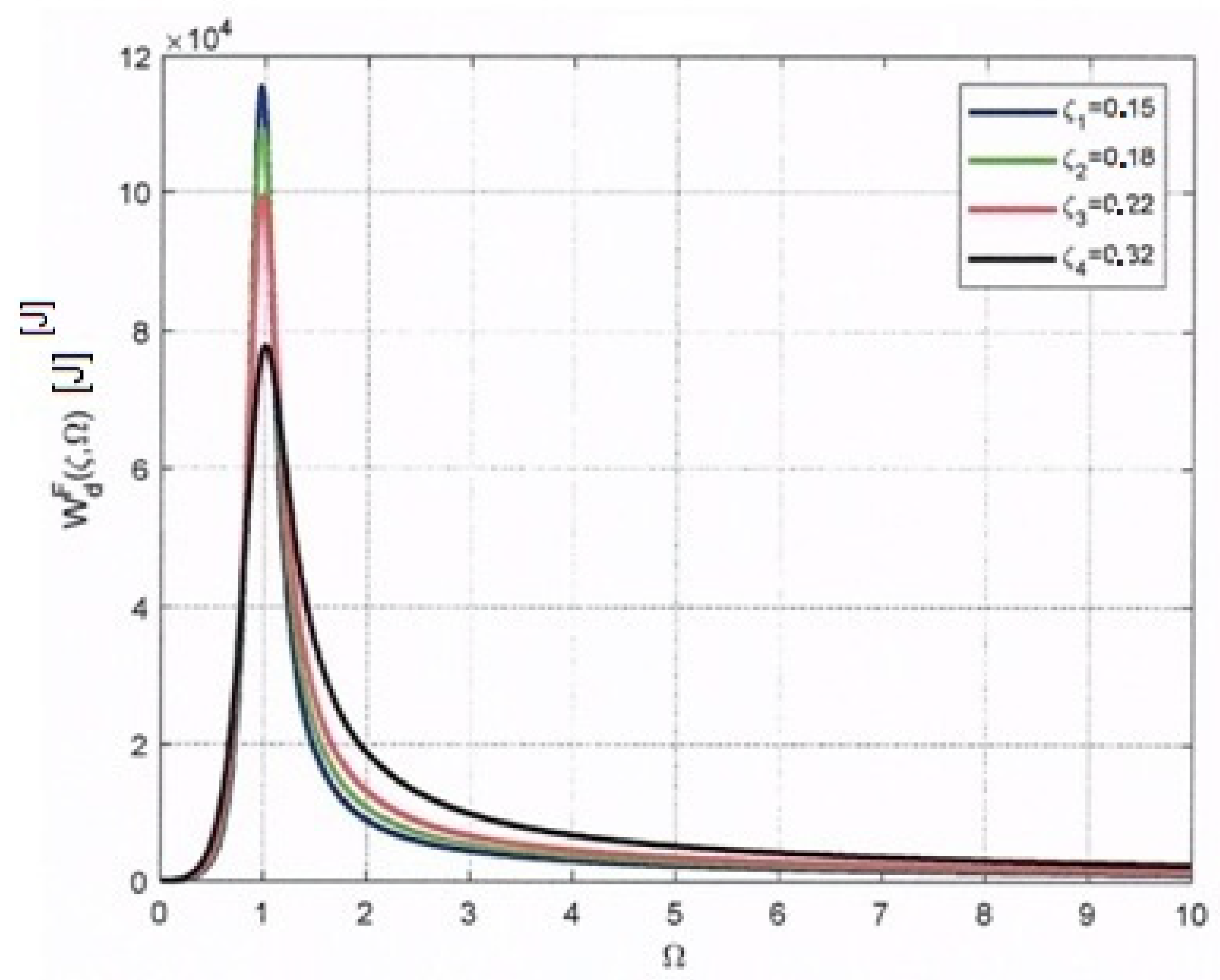
3.6. Dissipated Energy in the Viscous Dampers of Maxwell–Voigt–Kelvin Model
4. Discussion
5. Conclusions
- the rheological model has linear elements (elasticity, damping) and cannot describe the possible nonlinear behavior of the foundation soil;
- the dynamic model of the system considers the pilot/column as a rigid solid body with infinite stiffness;
- the pilot’s advancement in the foundation ground does not take into account any possible obstacles in the foundation ground (e.g., very hard rocks) or irregularities (e.g., cavities, liquefied soil, groundwater).
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Tonciu, O. Parametric analysis of vibrating equipment for the insertion of piles into the ground. ACTA Tech. Napoc. Appl. Math. Mech. Eng. 2020, 63, 95–100. [Google Scholar]
- Forssblad, L. Vibratory Soil and Rock Fill Compaction; Robert Olsson Tryckeri AB: Stockholm, Sweden, 1981. [Google Scholar]
- Capatana, G.F. Dynamic Behaviour of Complex Interaction Between Vibratory Drum Equipment and Natural Terrain Based on Rheological Evaluations. In Proceedings of the 10th HSTAM International Congress on Mechanics Chania, Crete, Greece, 25–27 May 2013. [Google Scholar]
- Capatana, G.F. Dynamic Simulation of the Vibratory Roller-Terrain Interaction Using an Elastoplastic Approach. In Annals of Dunărea de Jos University of Galaţi, XIV, Mechanical Engineering; Galati University Press: Galati, Romania, 2013. [Google Scholar]
- Lambe, T.W.; Whitman, R.V. Soil Mechanics; John Wiley&Sons: New York, NY, USA, 1969. [Google Scholar]
- Bejan, S. Dynamic Response Analysis of the Road System Compaction According to the Forced Vibration Mode. Rom. J. Acoust. Vib. 2014, XI, 164–166. [Google Scholar]
- Ishibashi, I.; Zhang, X. Unified dynamic shear moduli and damping ratios of sand and clay. Soils Found. 1993, 33, 182–191. [Google Scholar] [CrossRef] [Green Version]
- Colaço, A.; Ferreira, M.A.; Costa, P.A. Empirical, Experimental and Numerical Prediction of Ground-Borne Vibrations Induced by Impact Pile Driving. Vibration 2022, 5, 80–95. [Google Scholar] [CrossRef]
- Bay, J.A. A Summary of the Research on Pile Driving Vibrations. In Proceedings of the Pile Driving Contractor’s Association, 7th Annual Winter Round, Atlanta, GA, USA, 21–22 February 2003. [Google Scholar]
- Fernandes, M.M. Analysis and Design of Geotechnical Structures, 1st ed.; CRC Press: Boca Raton, FL, USA, 2020. [Google Scholar]
- Hunt, C.E.; Pestana, J.M.; Bray, J.D.; Riemer, M. Effect of pile driving on static and dynamic properties of soft clay. J. Geotech. Geoenviron. Eng. 2002, 128, 13–24. [Google Scholar] [CrossRef]
- Wang, S.; Zhu, S. Global Vibration Intensity Assessment Based on Vibration Source Localization on Construction Sites: Application to Vibratory Sheet Piling. Appl. Sci. 2022, 12, 1946. [Google Scholar] [CrossRef]
- Deckner, F.; Viking, K.; Hintze, S. Ground vibrations due to pile and sheet pile driving: Prediction models of today. In Proceedings of the 22nd European Young Geotechnical Engineers Conference, Gothenburg, Sweden, 26–29 August 2012; pp. 107–112. [Google Scholar]
- Kim, D.S.; Lee, J.S. Propagation and attenuation characteristics of various ground vibrations. Soil Dyn. Earthq. Eng. 2000, 19, 115–126. [Google Scholar] [CrossRef]
- Dai, D.; Zhang, Y.; Zhang, Y.; Wang, Z.; Li, Z. Kinematic Response of End-Bearing Piles under the Excitation of Vertical P-Waves Considering the Construction Effect. Appl. Sci. 2022, 12, 3468. [Google Scholar] [CrossRef]
- Li, Q.; Li, X.; Wen, M.; Hu, L.; Duan, W.; Li, J. Dynamic Responses of a Pile with a Cap under the Freezing and Thawing Processes of a Saturated Porous Media Considering Slippage between Pile and Soil. Appl. Sci. 2022, 12, 4214. [Google Scholar] [CrossRef]
- Varghese, R.; Boominathan, A.; Banerjee, S. Stiffness and load sharing characteristics of piled raft foundations subjected to dynamic loads. Soil Dyn. Earthq. Eng. 2020, 133, 106117. [Google Scholar] [CrossRef]
- Liming, Q.; Xuanming, D.; Changjie, Z.; Chongrong, W.; Guangwei, C. Numerical and test study on vertical vibration characteristics of pile group in slope soil topography. Earthq. Eng. Eng. Vib. 2021, 20, 377–390. [Google Scholar] [CrossRef]
- Yang, X.; Wang, L.; Wu, W.; Liu, H.; Jiang, G.; Wang, K.; Mei, G. Vertical Dynamic Impedance of a Viscoelastic Pile in Arbitrarily Layered Soil Based on the Fictitious Soil Pile Model. Energies 2022, 15, 2087. [Google Scholar] [CrossRef]
- Kwon, S.Y.; Yoo, M. Evaluation of Dynamic Soil-Pile-Structure Interactive Behavior in Dry Sand by 3D Numerical Simulation. Appl. Sci. 2019, 9, 2612. [Google Scholar] [CrossRef] [Green Version]
- Halder, P.; Manna, B. Large scale model testing to investigate the influence of granular cushion layer on the performance of disconnected piled raft system. Acta Geotech. 2021, 16, 1597–1614. [Google Scholar] [CrossRef]
- Rashidifar, M.A.; Rashidifar, A.A.; Abertavi, A. Nonlinear characteristics of the pile soil system under vertical vibration. Univers. J. Eng. Sci. 2016, 4, 59–65. [Google Scholar] [CrossRef]
- Fattah, M.Y.; Zabar, B.S.; Mustafa, F.S. Effect of saturation on response of a single pile embedded in saturated sandy soil to vertical vibration. Eur. J. Environ. Civ. Eng. 2020, 24, 381–400. [Google Scholar] [CrossRef]
- Machacek, J.; Staubach, P.; Tafili, M.; Zachert, H.; Wichtmann, T. Investigation of three sophisticated constitutive soil models: From numerical formulations to element tests and the analysis of vibratory pile driving tests. Comput. Geotech. 2021, 138, 104276. [Google Scholar] [CrossRef]
- Wei, J.; Wang, W.; Wu, J. Hydro-Mechanically Coupled Numerical Modelling on Vibratory Open-Ended Pile Driving in Saturated Sand. Appl. Sci. 2022, 12, 4527. [Google Scholar] [CrossRef]
- Vogelsang, J.; Huber, G.; Triantafyllidis, T. Experimental Investigation of Vibratory Pile Driving in Saturated Sand; Springer International Publishing: Cham, Switzerland, 2017; pp. 101–123. [Google Scholar]
- O’Neill, M.W.; Vipulanandan, C.; Wong, D. Laboratory modeling of vibro-driven piles. J. Geotech. Eng. 1990, 116, 1190–1209. [Google Scholar] [CrossRef]
- Spanu (Stefan), G.C.; Capatana, G.F.; Potirniche, A. Analysis of the Transmissibility Ratio and the Isolation Degree of the Vibration for 1DOF Mechanical Systems with Zener Viscous Damping Model. Synth. Theor. Appl. Mech. 2019, 10, 43–56. [Google Scholar]
- Capatana, G.F.; Potirniche, A.; Spanu (Stefan), G.C. The Dynamics of the 1 DOF Mechanical Systems with Viscous Damping Zener Model. Amplitude Factor Analysis. Synth. Theor. Appl. Mech. 2019, 10, 25–34. [Google Scholar]
- Spanu (Stefan), G.C.; Capatana, G.F.; Potirniche, A. Comparative Analysis of the Dynamic Parameters of Mechanical Systems 1DOF with Complex Reological Behavior Elastomeric Bearings. Synth. Theor. Appl. Mech. 2019, 10, 225–230. [Google Scholar]
- Bratu, P.; Dobrescu, C. Evaluation of the Dissipated Energy in Vicinity of the Resonance, depending on the Nature of Dynamic Excitation. Rom. J. Acoust. Vib. 2019, 16, 66–71. [Google Scholar]
- Dobrescu, C.F. Dynamic Response of the Newton Voigt–Kelvin Modelled Linear Viscoelastic Systems at Harmonic Actions. Symmetry 2020, 12, 1571. [Google Scholar] [CrossRef]
- Bratu, P. Hysteretic Loops in Correlation with the Maximum Dissipated Energy, for Linear Dynamic Systems. Symmetry 2019, 11, 315. [Google Scholar] [CrossRef] [Green Version]
- Rao, M. Mechanical Vibrations; Addison-Wesley Pub. Co.: Boston, MA, USA, 1986. [Google Scholar]
- Radeș, M. Mechanical Vibrations; Editura Printech: București, Romania, 2006. [Google Scholar]
- Vasile, O. Active Vibration Control for Viscoelastic Amortization Systems under the Action of Inertial Forces. Rom. J. Acoust. Vib. 2017, 14, 54–58. [Google Scholar]
- Sireteanu, T.; Giuclea, M.; Mitu, A.M. An analitical approach for approximation of experimental hysteretic by Bouc-Wen model. Procc. Rom. Acad. Ser. A 2009, 10, 43–54. [Google Scholar]
- Muscă (Anghelache), D.G.; Potîrniche, A.; Căpățână, G.F. Analyse of dynamic operation mode for drilling machine equipped with drill for pits digging. In Proceedings of the ModTech International Conference 2020, Modern Technologies in Industrial Engineering Iasi, Mamaia, Romania, 23–27 June 2020. [Google Scholar]






Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Goanță, A.M.; Bratu, P.; Drăgan, N. Dynamic Response of Vibratory Piling Machines for Ground Foundations. Symmetry 2022, 14, 1238. https://doi.org/10.3390/sym14061238
Goanță AM, Bratu P, Drăgan N. Dynamic Response of Vibratory Piling Machines for Ground Foundations. Symmetry. 2022; 14(6):1238. https://doi.org/10.3390/sym14061238
Chicago/Turabian StyleGoanță, Adrian Mihai, Polidor Bratu, and Nicușor Drăgan. 2022. "Dynamic Response of Vibratory Piling Machines for Ground Foundations" Symmetry 14, no. 6: 1238. https://doi.org/10.3390/sym14061238
APA StyleGoanță, A. M., Bratu, P., & Drăgan, N. (2022). Dynamic Response of Vibratory Piling Machines for Ground Foundations. Symmetry, 14(6), 1238. https://doi.org/10.3390/sym14061238