
Stability of Euler Methods for Fuzzy Differential Equation

Abstract
:1. Introduction
2. Preliminaries
- (1)
- ;
- (2)
- , whenever ;
- (3)
- for any ;
- (4)
- for any collection in with .
3. Stability of Numerical Methods
3.1. Stability in Mean-Square for FDE
3.2. The Concept of Numerical Stability
4. Conditions of Stability and Stability Region of Euler Methods
4.1. Asymptotical Stability
- (1)
- Applying the implicit fuzzy Euler scheme to (3), we obtain the iterative form The difficulty is that may approach infinity whenever the value of the normal fuzzy variable ξ is in the neighborhood of . In this case, the implicit Euler scheme is instable for any λ, μ and h. Hence, the value of ξ will also affect the asymptotical stability and MS stability of implicit fuzzy Euler scheme. However, in all other cases, the asymptotically stable function of the implicit fuzzy Euler method expressed by and the region of the implicit fuzzy Euler method coincides with that of the semi-implicit fuzzy Euler scheme when . As a result, the implicit method has the best stability properties.
- (2)
- Under the condition that the value of the normal fuzzy variable ξ is in the neighborhood of , if we increase α, i.e., going towards implicitness, the stability is improving but the fully implicit scheme is unstable again. This reveals that the implicit scheme is not a special case of the semi-implicit one, because the latter one handles the last term fully explicit.
- (3)
- The original Dahlquist test equation in the not-fuzzy case is a special case of the FDE studied here () and for that, the implicit method has extremely good stability properties.
4.2. MS Stability
4.3. Exponential Stability
4.4. A Stability
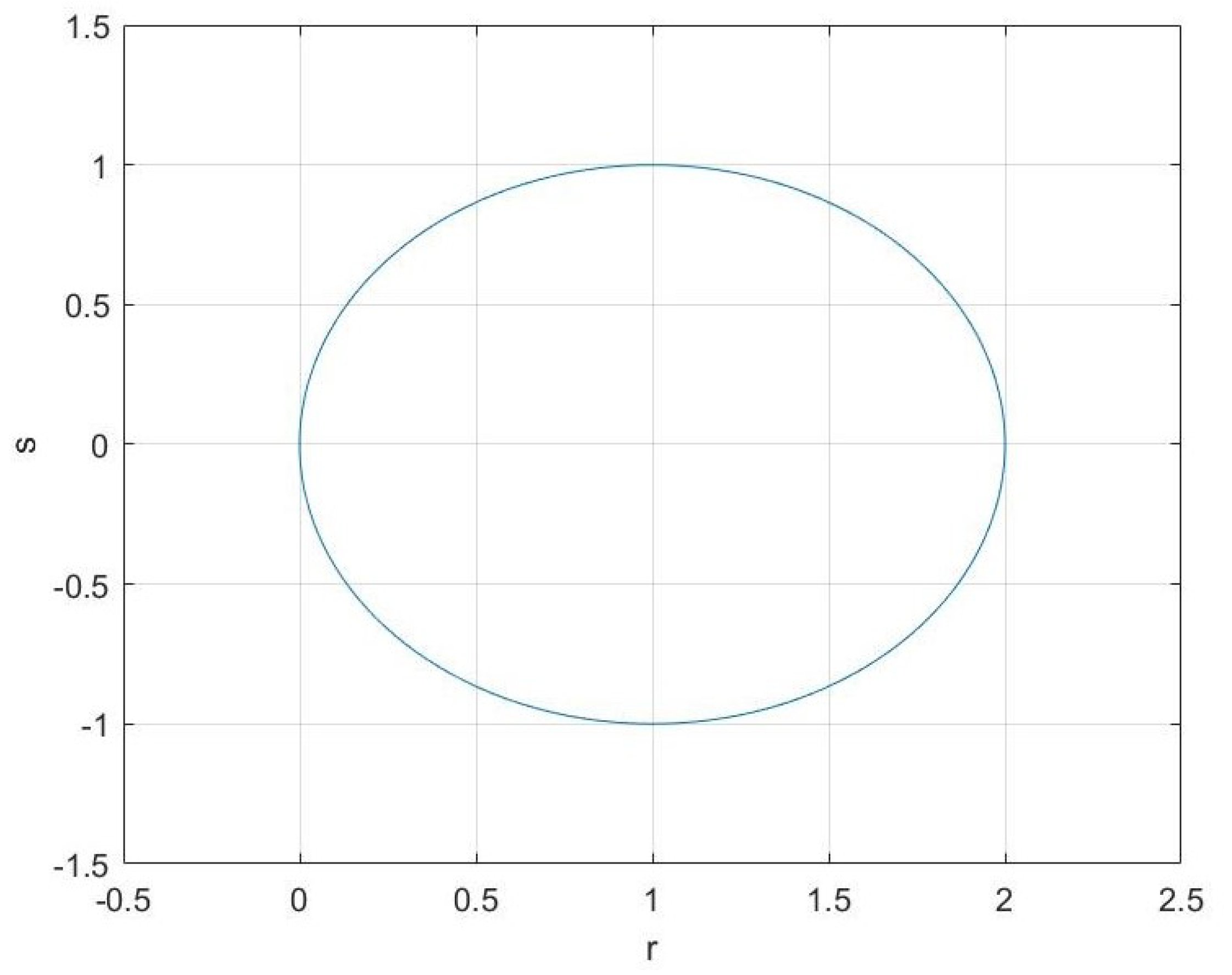
- (i)
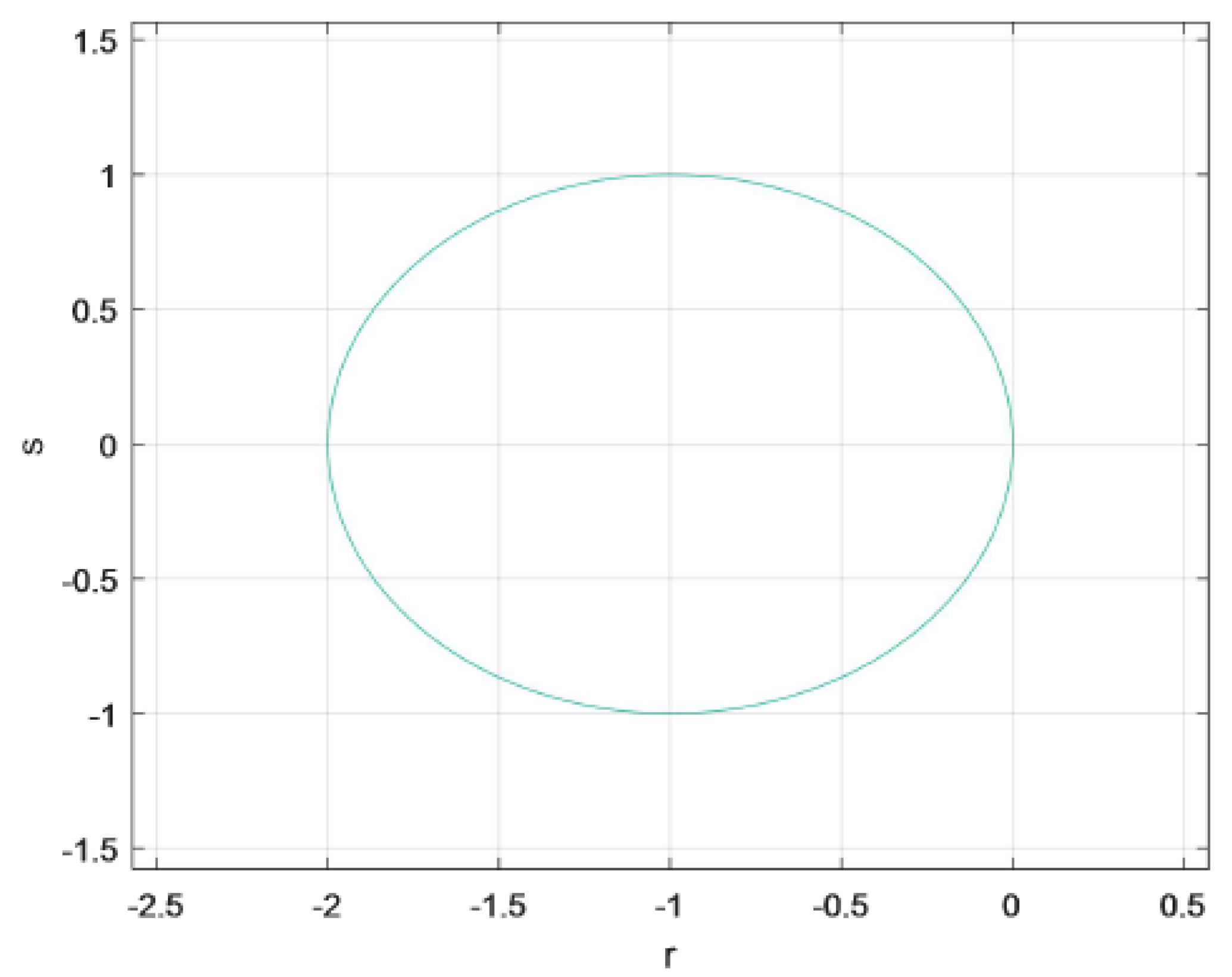
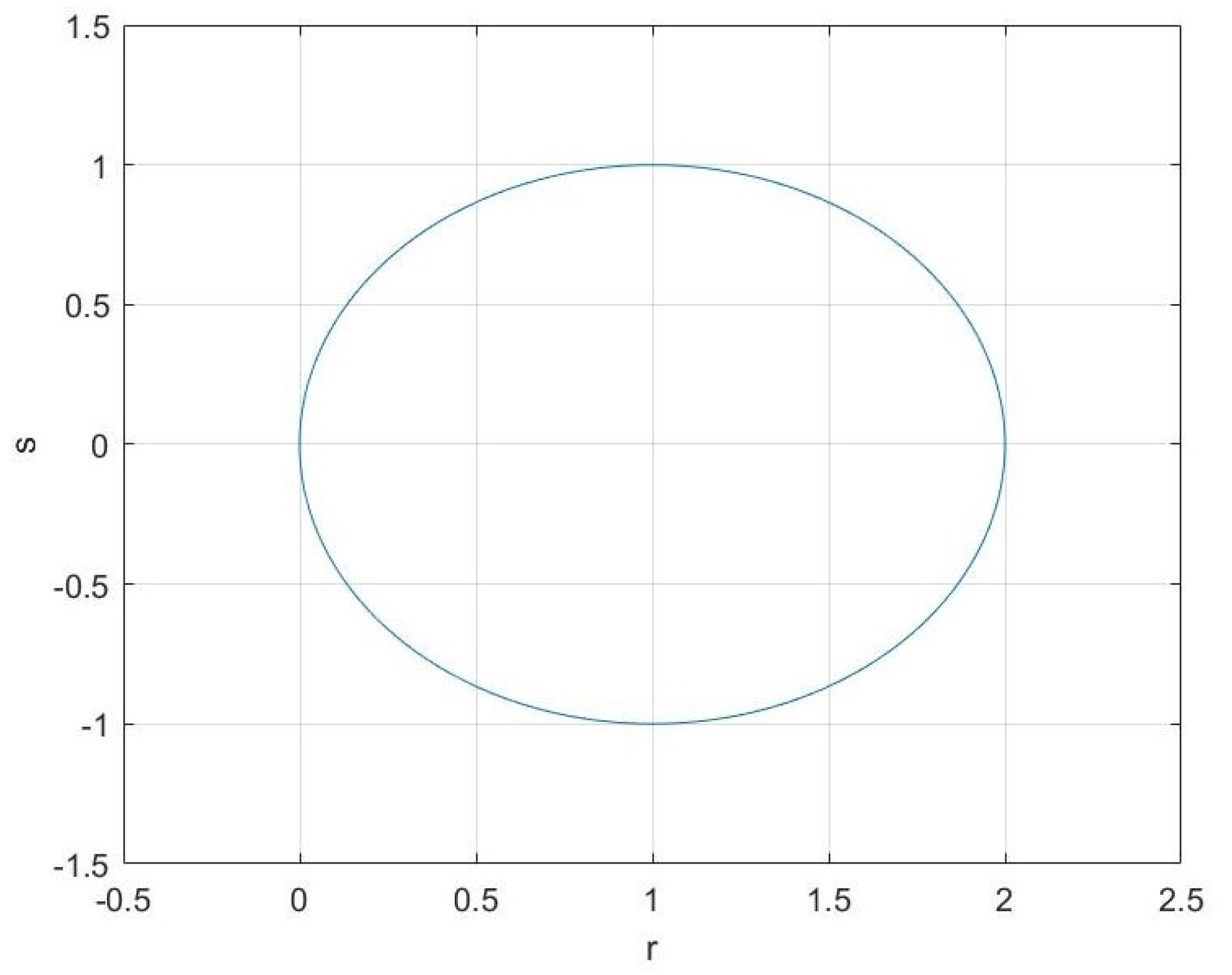
- Applying the explicit fuzzy Euler scheme to (4), we yield Let , i.e., It is easy to see that the absolute stable region of the method is the interior of a circle with as its center and 1 as the radius, so the explicit fuzzy Euler scheme is not A stable from Definition 9.
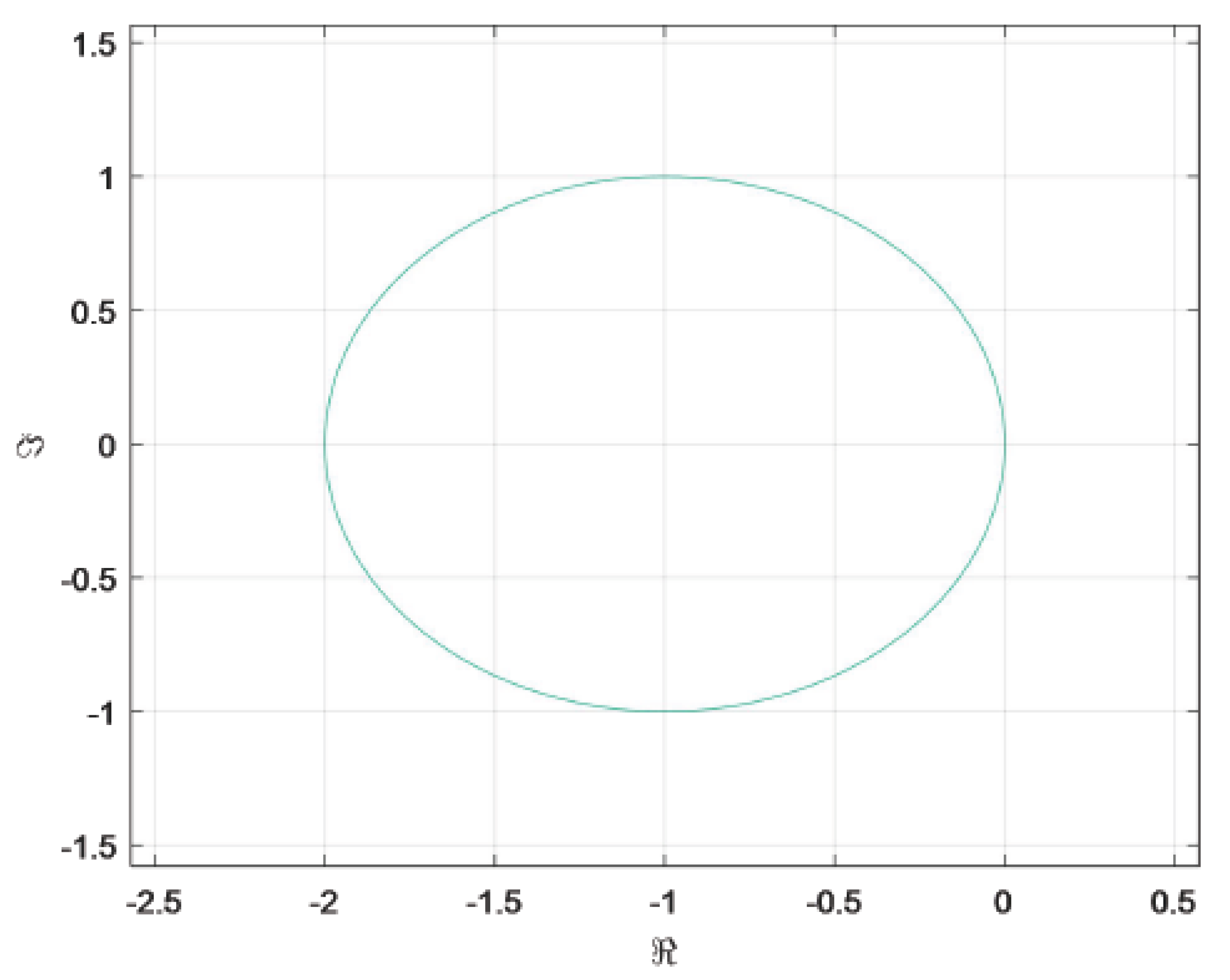
- (ii)
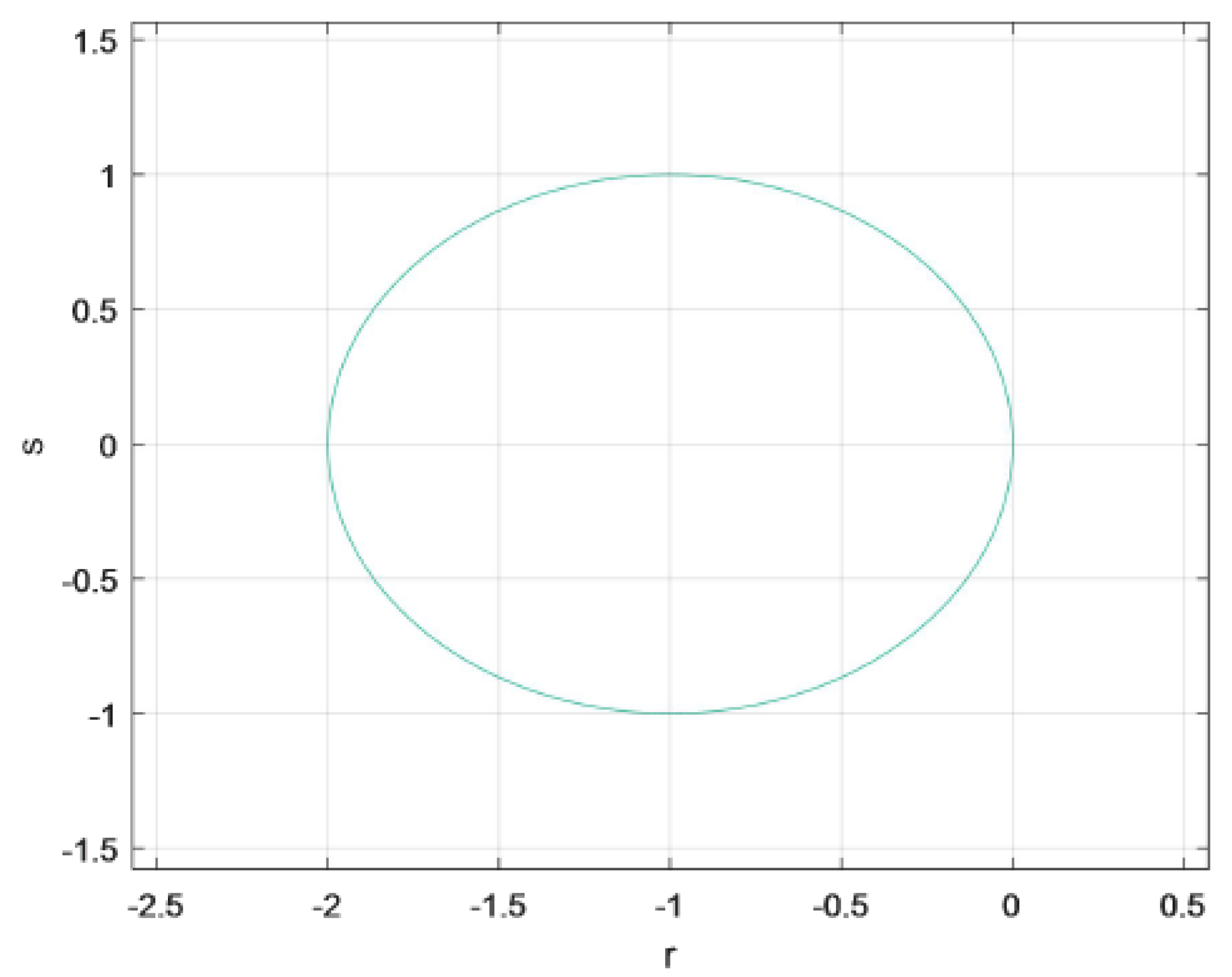
- Applying the implicit fuzzy Euler scheme to (4), we similarly gain Let i.e., It suffices to show that the absolute stable region of the method is the exterior of a circle with as its center and 1 as the radius, so the implicit fuzzy Euler scheme is A stable.
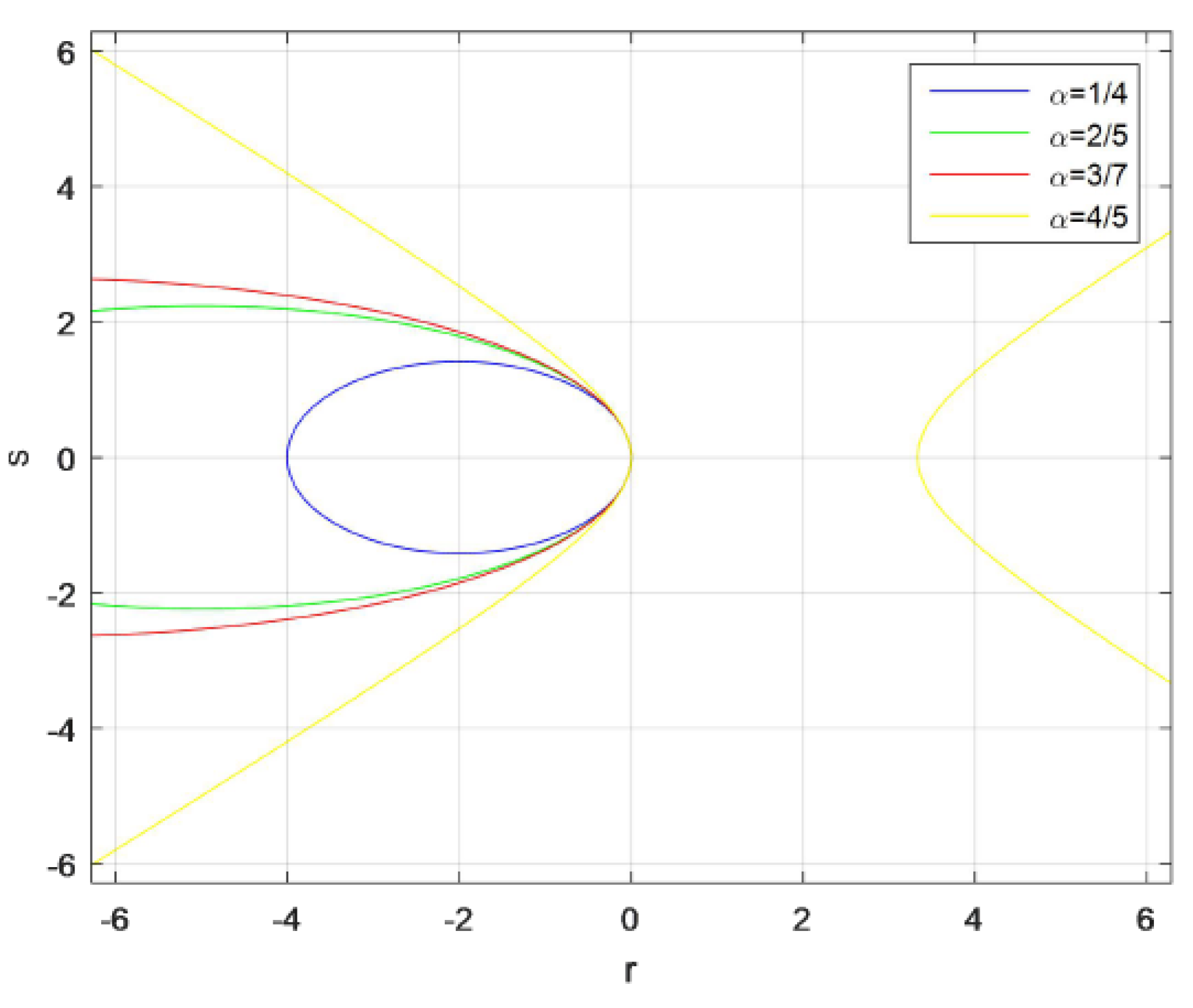
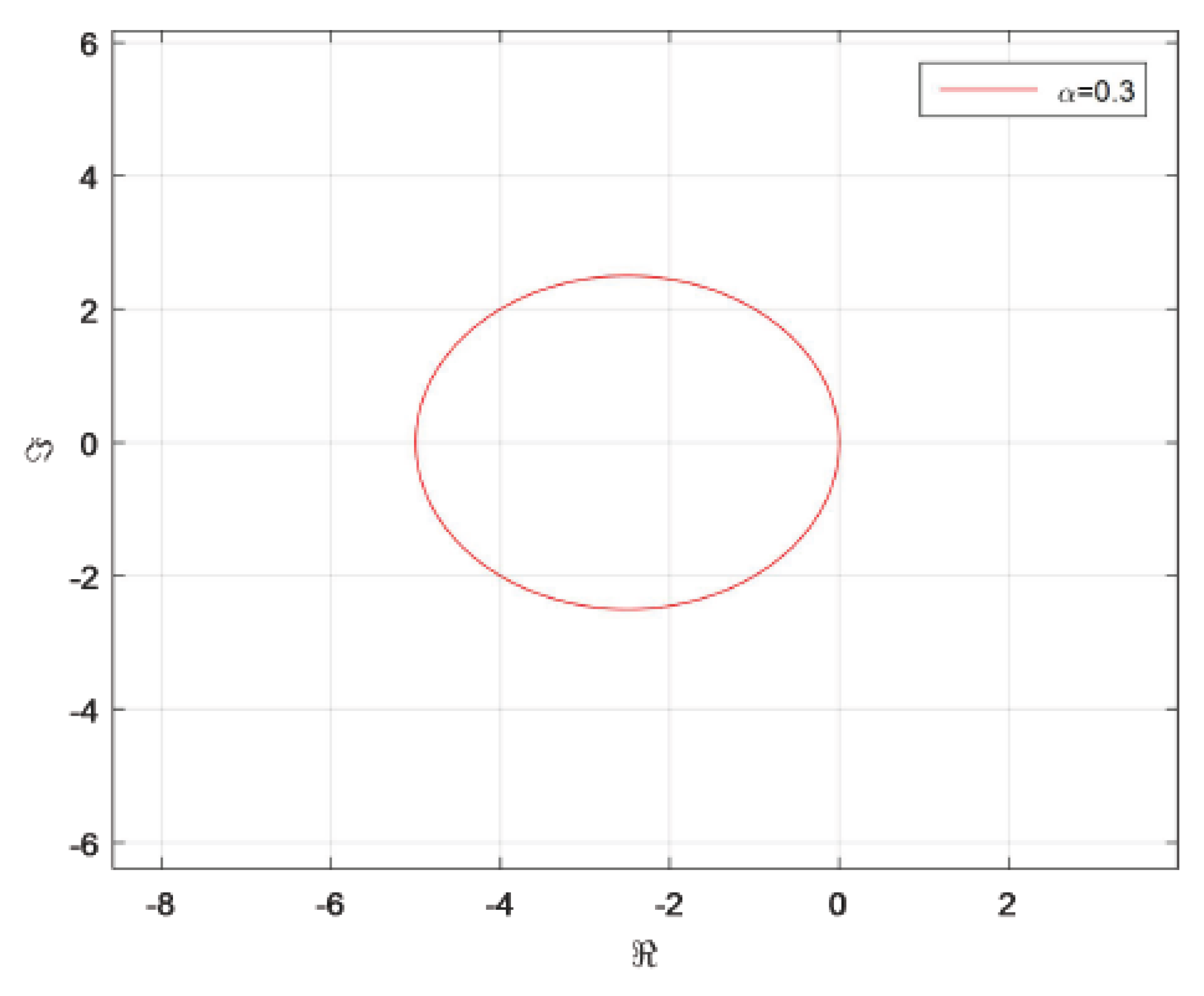
- (iii)
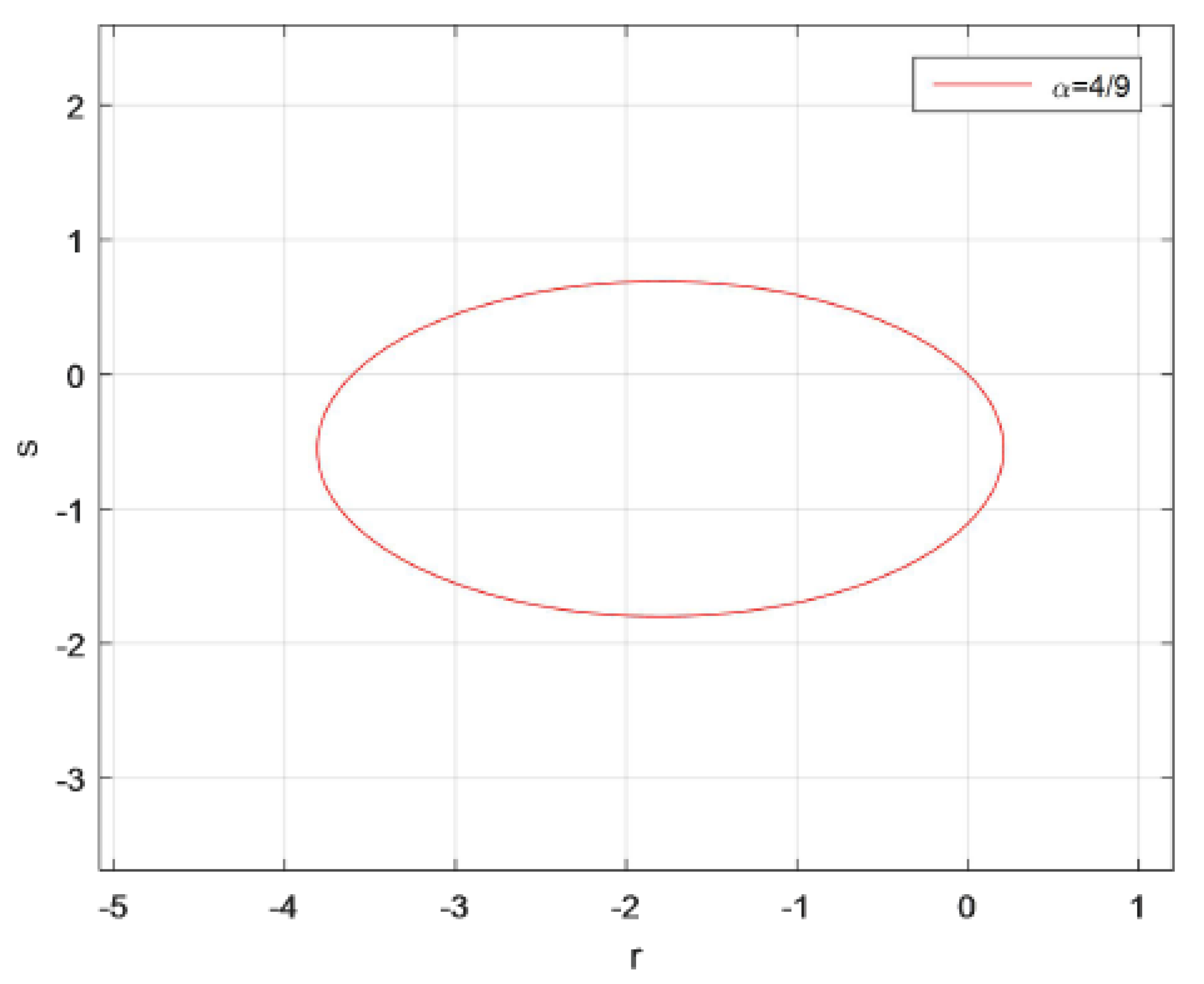
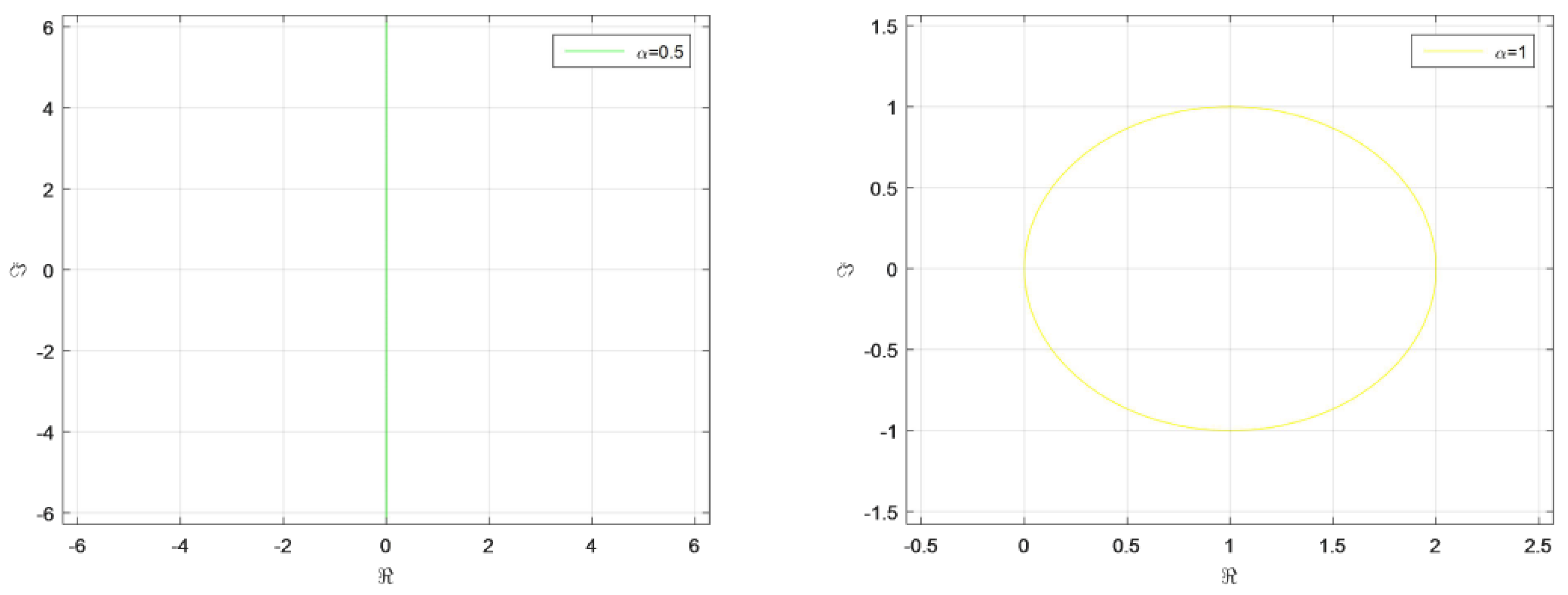
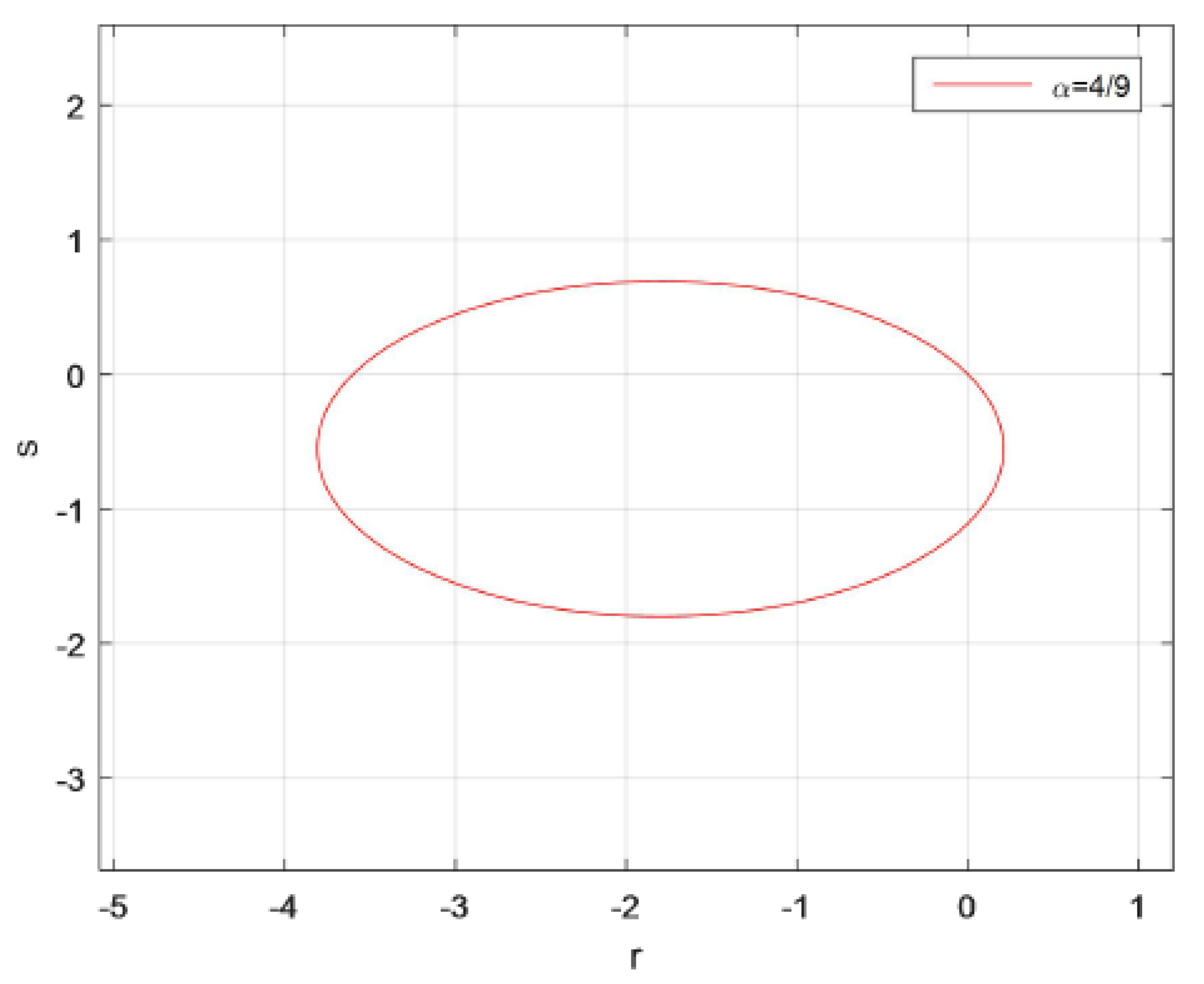
- Applying the semi-implicit fuzzy Euler scheme to (4), we havethat is Let i.e.,
- Case 1: . The semi-implicit fuzzy Euler scheme is A stable only if .
- Case 2: . We find that (7) can be written as
5. Numerical Experiment
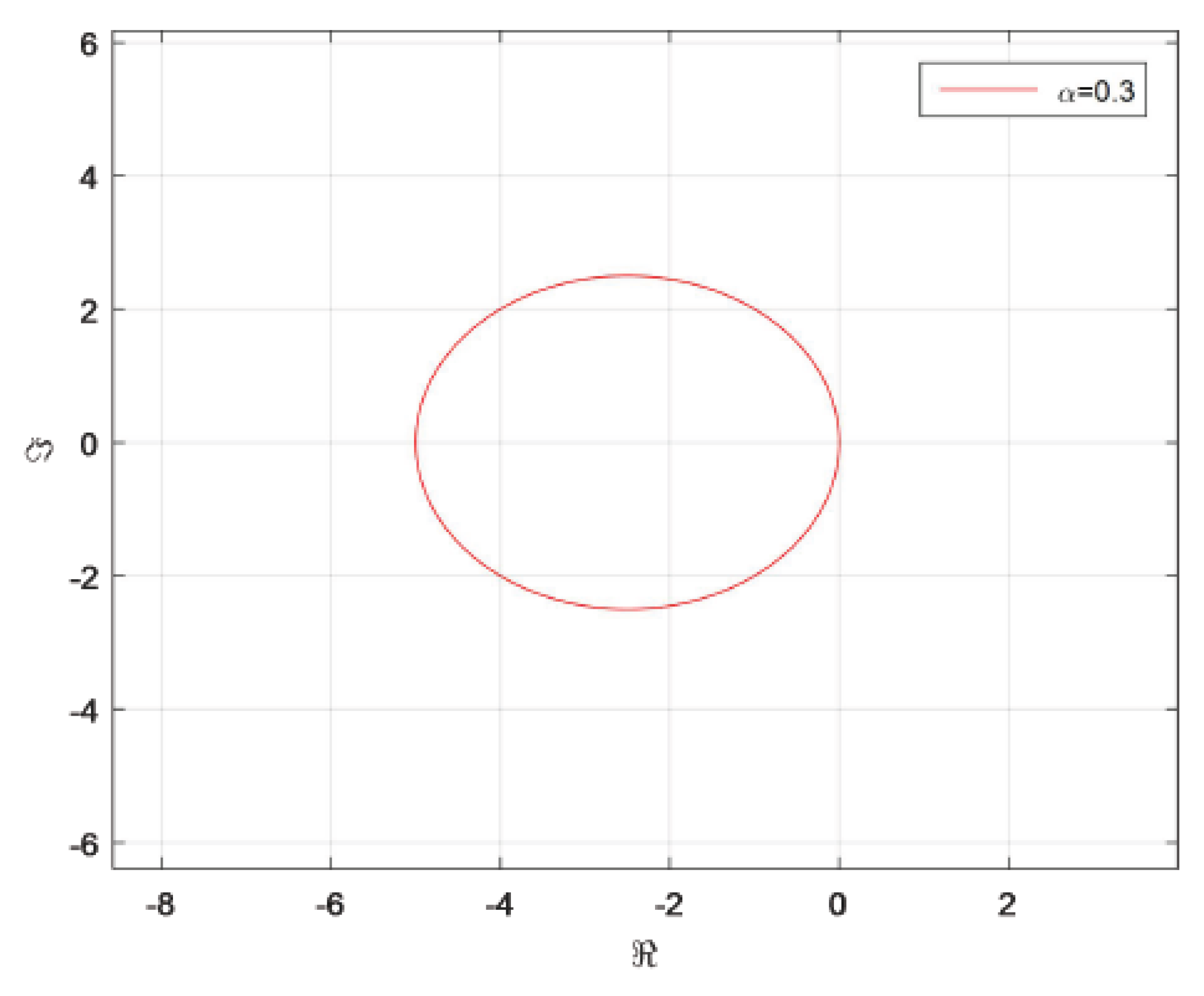
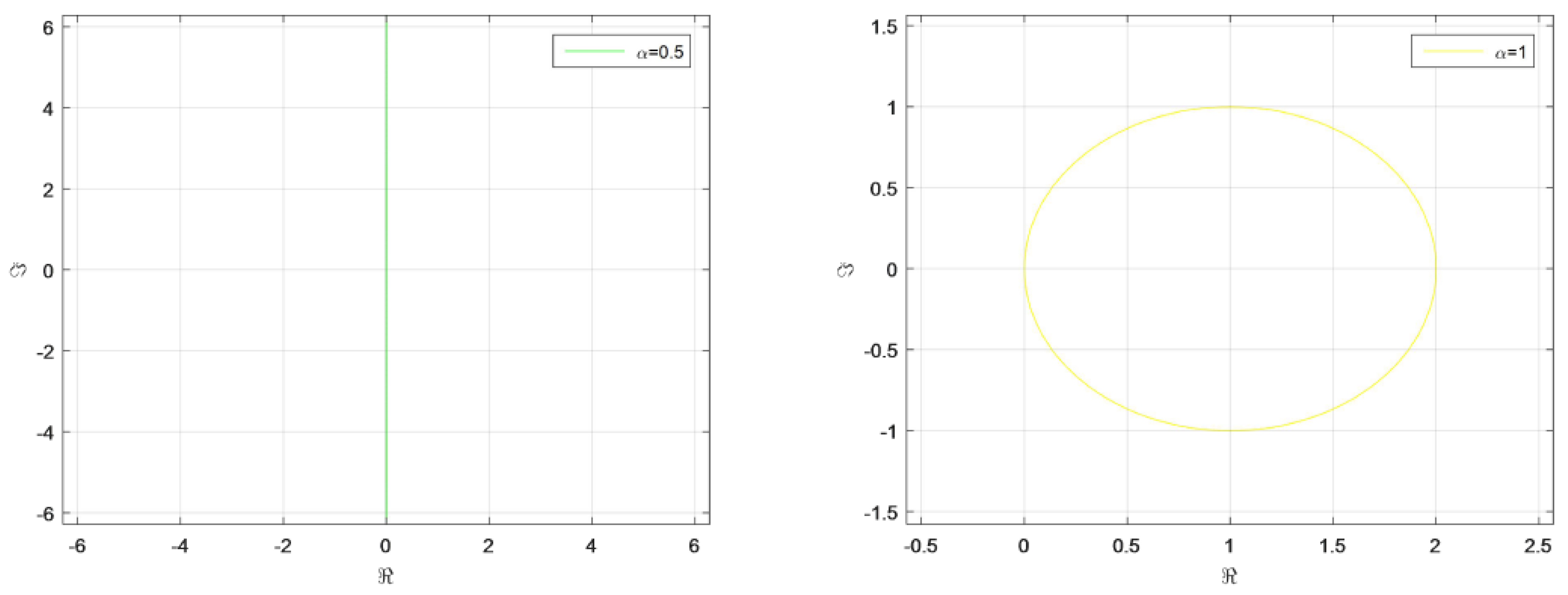
5.1. The Effect of on MS Stability in Semi-Implicit Fuzzy Euler Scheme
5.2. Stability of Three Fuzzy Euler Scheme
- (1)
- Asymptotical stability
- (2)
- MS stability
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Ngo, V.H. The initial value problem for interval-valued second-order differential equations under generalized H-differentiability. Inf. Sci. 2015, 311, 119–148. [Google Scholar]
- Zhang, S.; Sun, J. Stability of fuzzy differential equations with the second type of Hukuhara derivative. IEEE Trans. Fuzzy Syst. 2015, 23, 1323–1328. [Google Scholar] [CrossRef]
- Khastan, A.; Perfilieva, I.; Alijani, Z. A new fuzzy approximation method to Cauchy problems by fuzzy transform. Fuzzy Sets Syst. 2016, 288, 75–95. [Google Scholar] [CrossRef]
- Khastan, A.; Alijani, Z.; Perfilieva, I. Fuzzy transform to approximate solution of two-point boundary value problems. Math. Methods Appl. Sci. 2017, 40, 6147–6154. [Google Scholar] [CrossRef]
- Allahviranloo, T.; Gouyandeh, Z.; Armand, A. A full fuzzy method for solving differential equation based on Taylor expansion. J. Intell. Fuzzy Syst. 2015, 29, 1039–1055. [Google Scholar] [CrossRef]
- Alijani, Z.; Baleanu, D.; Shiri, B.; Wu, G.C. Spline collocation methods for systems of fuzzy fractional differential equations. Chaos, Solitons Fractals 2020, 131, 109510. [Google Scholar] [CrossRef]
- Nematollah, K.; Sedigheh, S.R.; Hossein, J. Differential transform method: A tool for solving fuzzy differential equations. Int. J. Appl. Comput. Math. 2018, 4, 33. [Google Scholar]
- Chehlabi, M. Continuous solutions to a class of first-order fuzzy differential equations with discontinuous coefficients. Comput. Appl. Math. 2018, 37, 5058–5081. [Google Scholar] [CrossRef]
- Khastan, A.; Rodrguez-Lpez, R. On linear fuzzy differential equations by differential inclusions’ approach. Fuzzy Sets Syst. 2020, 387, 49–67. [Google Scholar] [CrossRef]
- Mosleh, M.; Otadi, M. Approximate solution of fuzzy differential equations under generalized differentiability. Appl. Math. Model. 2015, 39, 3003–3015. [Google Scholar] [CrossRef]
- Soheil, S.; Ali, A.; Animesh, M.; Sankar, P.M.; Shariful, A. The behavior of logistic equation with alley effect in fuzzy environment: Fuzzy differential equation approach. Int. J. Appl. Comput. Math. 2018, 4, 62. [Google Scholar]
- Liu, B.; Liu, Y.K. Expected value of fuzzy variable and fuzzy expected value models. IEEE Trans. Fuzzy Syst. 2002, 10, 445–450. [Google Scholar]
- Liu, B. Fuzzy process, hybrid process and uncertain process. J. Uncertain Syst. 2008, 2, 3–16. [Google Scholar]
- Dai, W. Lipschitz continuity of Liu process. In Proceedings of the 8th International Conference on Information and Management Science, Kunming, China, 20–28 July 2009; pp. 756–760. [Google Scholar]
- You, C.; Huo, H.; Wang, W. Multi-dimensional Liu process, differential and integral. East Asian Math. J. 2013, 29, 13–22. [Google Scholar] [CrossRef] [Green Version]
- Zhu, Y. Stability analysis of fuzzy linear differential equations. Fuzzy Optim. Decis. Mak. 2010, 9, 169–186. [Google Scholar] [CrossRef]
- You, C.; Hao, Y. Stability in mean for fuzzy differential equation. J. Ind. Manag. Optim. 2019, 15, 1375–1385. [Google Scholar] [CrossRef]
- You, C.; Hao, Y. Stability in credibility for fuzzy differential equation. J. Intell. Fuzzy Syst. 2019, 36, 213–218. [Google Scholar] [CrossRef]
- You, C.; Hao, Y. Fuzzy Euler approximation and its local convergence. J. Comput. Appl. Math. 2018, 343, 55–61. [Google Scholar] [CrossRef]
- Cheng, Y.; You, C. Convergence of numerical methods for fuzzy differential equations. J. Intell. Fuzzy Syst. 2020, 38, 5257–5266. [Google Scholar] [CrossRef]
- Zhu, Y. A fuzzy optimal control model. J. Uncertain Syst. 2009, 3, 270–279. [Google Scholar]
- Qin, Z.; Bai, M.; Dan, R. A fuzzy control system with application to production planning problems. Inf. Sci. 2011, 181, 1018–1027. [Google Scholar] [CrossRef]
- Liu, B. Uncertainty Theory, 2nd ed.; Springer: Berlin/Heidelberg, Germany, 2007. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Stabilities | Asymptotical Stability | MS Stability Exponential Stability | A Stability |
|---|---|---|---|
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
You, C.; Cheng, Y.; Ma, H. Stability of Euler Methods for Fuzzy Differential Equation. Symmetry 2022, 14, 1279. https://doi.org/10.3390/sym14061279
You C, Cheng Y, Ma H. Stability of Euler Methods for Fuzzy Differential Equation. Symmetry. 2022; 14(6):1279. https://doi.org/10.3390/sym14061279
Chicago/Turabian StyleYou, Cuilian, Yan Cheng, and Hongyan Ma. 2022. "Stability of Euler Methods for Fuzzy Differential Equation" Symmetry 14, no. 6: 1279. https://doi.org/10.3390/sym14061279
APA StyleYou, C., Cheng, Y., & Ma, H. (2022). Stability of Euler Methods for Fuzzy Differential Equation. Symmetry, 14(6), 1279. https://doi.org/10.3390/sym14061279