Abstract
In order to explore the magnetic moment rotation in nanocrystalline soft magnetic alloys under high-frequency sinusoidal excitation, based on G. Herzer’s stochastic anisotropy theory and symmetry principle, a three-dimensional model of nanocrystalline alloy was established, and a sinusoidal alternating magnetic field with a frequency f of 1 kHz to 10 kHz and an amplitude H of 0.1 T to 0.8 T was applied to the model. The magnetic moment movement in the magnetization process is investigated at the mesoscopic and macroscopic levels by defining the magnetic moment deflection velocity ω and magnetization rate v, respectively. The results show that ω is positively correlated with the alternating magnetic field f and H, and the increase of f has a particularly significant effect on ω growth compared with the increase of H. Then the function relation between ω and f and H is obtained by fitting. In which the coefficient of f is much larger than that of H, about 2.5 times that of H. Finally, the magnetization curve is measured by an AC measuring device, and the functional relations between v and the alternating magnetic fields f and H are obtained, in which the coefficient of f is much larger than that of H, about 2.75 times that of H. This value is approximately the same as that of the ω analysis, at the same time the relative error is only 9.1%.
1. Introduction
With the continuous expansion of long-distance DC power transmission and grid-connected energy storage systems in China, high-frequency transformers, which realize DC voltage conversion and energy exchange through high-power electronic devices and their control technology, has shown great advantages and gained extensive attention [1,2]. Compared with the power frequency transformer, the high-frequency transformer has the advantages of small size, more energy transfer and constant voltage output on the load side. However, as the operating frequency gradually increases to kilohertz, the core loss at the high-frequency complex magnetic field will greatly increase. The small volume of a high-frequency transformer is not conducive to heat dissipation, resulting in its own temperature rising. This puts forward a higher demand on the performance of the core materials used in high-frequency transformers. Nanocrystalline soft magnetic alloy (FINEMET, NANOPERM, HITPERM series alloy) is a kind of two-phase composite ferromagnetic material. Its microstructure shows that spherical nanograins are dispersed on the amorphous matrix. It has excellent comprehensive soft magnetic properties such as high saturation magnetic induction intensity, high effective permeability, low dissipation and low coercivity. In addition, the low cost, simple preparation process and high heat resistance make it likely to become one of the most widely used ferromagnetic materials [3,4,5].
In recent years, researchers at home and abroad have carried out a series of research work on the magnetic property characterization and preparation process of nanocrystalline soft magnetic alloy materials, and made important progress. Zhang Changgeng et al. proposed a transient vector hysteresis loss model based on the measurement of rotating magnetic properties, which can predict the instantaneous hysteresis loss of any magnetic flux density trajectory in space [6]. Zhi et al. studied the effect of annealing temperature on the initial permeability of Fe-based nanocrystalline soft magnetic alloy and found that the initial permeability of the material reached the maximum when the annealing temperature was 550 °C [7]. However, these studies are mainly from the macroscopic point of view, and most of them are about the influence of the preparation process on the magnetic properties of the materials, so it is difficult to promote in the electrical field. Therefore, Wu Jiele [8] et al. conducted micromagnetic simulation on nanocrystalline soft magnetic alloys and found that the displacement of domain walls during magnetization obviously lagged behind the magnetic moment deflection, which could be regarded as the result of the magnetic moment deflection. Han Zhiyun et al. [9], by defining “dynamic saturation” and “static saturation”, explored the influence of external alternating magnetic field amplitude or frequency variation on the magnetization process of nanocrystalline soft magnetic alloy.
However, the above studies only studied the magnetic moment rotation and domain wall displacement during the magnetization of nanocrystalline soft magnetic alloys from the mesoscopic level. In order to further investigate the magnetic moment movement during saturation magnetization of nanocrystalline soft magnetic alloy under external conditions, it is necessary to quantitatively analyze the relationship between the internal magnetic moment deflection and external high-frequency alternating magnetic field from both the micro and macro levels. Micromagnetic simulation can accurately simulate a variety of parameters that are difficult to calculate in macroscopic models. Moreover, the internal physical process of material magnetization can be directly observed through the graphical interface, which is crucial for researching the high-frequency magnetization process of materials.
Therefore, a three-dimensional model of nanocrystalline soft magnetic alloy at mesoscopic scale was established, and the static magnetic properties of the model were obtained by applying a static magnetic field. Then, the static magnetic properties of the nanocrystalline soft magnetic alloy were measured using a DC magnetic testing system and compared with the simulation data to verify the correctness of the model. Next, by changing the amplitude H and frequency f of the alternating magnetic field and taking the magnetic moment deflection angular velocity ω as the research parameter, the magnetic moment deflection in the magnetization process was quantitatively investigated from the microscopic level, and the functional relations between ω and H, f are obtained. Finally, the magnetization curve of the material was measured by an AC measuring device. The magnetization rate v was defined to quantitatively explore the change in magnetic induction intensity B in the magnetization process of materials at the macro level. The function relation between v and H, f is obtained, and compared with the function relation between ω and H, f, so as to realize micro and macro two-way verification. This can lay a theoretical foundation and provide key technology for the design and application of new core materials for high-frequency transformers.
2. Micromagnetic Simulation
2.1. Micromagnetic Simulation Model
Derived from LLG (Landau–Lifshitz–Gilbert) equations, micromagnetic simulation can accurately simulate a variety of parameters that are difficult to calculate in macroscopic models by including a variety of microscopic dynamic magnetization processes, such as the pinning effect due to the displacement of domain walls during magnetization, the relaxation mechanism during dynamic magnetization, and so on. Moreover, the internal physical process of material magnetization can be directly observed through the graphical interface, which is crucial for researching the high-frequency magnetization process of materials [10,11,12]. Meanwhile, the LLG equation can be used to numerically solve the dynamic motion of magnetization, and the calculation formula is as follows:
where, γ is the Gilbert gyromagnetic ratio, it describes the motion form of the magnetic moment of a magnet under the action of an external magnetic field. The default is γ = 2.211 × 105. Heff is the effective field, that is the external magnetic field, Ms is the saturation magnetization value and α is the dimensionless Gilbert damping constant, its experimental value is generally between 0.01 and 0.1. The larger the value of α is, the longer the simulation time of LLG equation is, and researchers can observe the dynamic evolution process of the magnetic moment in magnetization process with very high time resolution. However, the simulation time also increases. In order to shorten the calculation time 0.5 is used in the simulation in this paper, which is large compared with experimental values, but allows simulations to converge to equilibria in a reasonable time [13].
The process of magnetization of magnetic materials begins with the total Gibbs free energy , which is closely related to magnetization intensity. The total Gibbs free energy of magnetic systems consists of the exchange field, demagnetization energy, magnetocrystalline anisotropy field and Zeeman field, the formula is as follows [14].
where is the magneto-crystal anisotropy energy, which comes from the anisotropy of the crystal structure. In the magnetization process, the magnetic moment will be arranged along the easy magnetization axis of the system. is the exchange action energy, which comes from the spin of the electron and reflects the interaction between the magnetic moments. In the process of magnetization, the magnetic moments are driven to align parallel to each other. is the demagnetization energy, which comes from the uneven distribution of magnetization intensity and causes non-linear arrangement of magnetic moments in the magnetization process. is Zeeman energy, which comes from the external magnetic field and forces the magnetic moment to deflect towards the direction of the external magnetic field during magnetization.
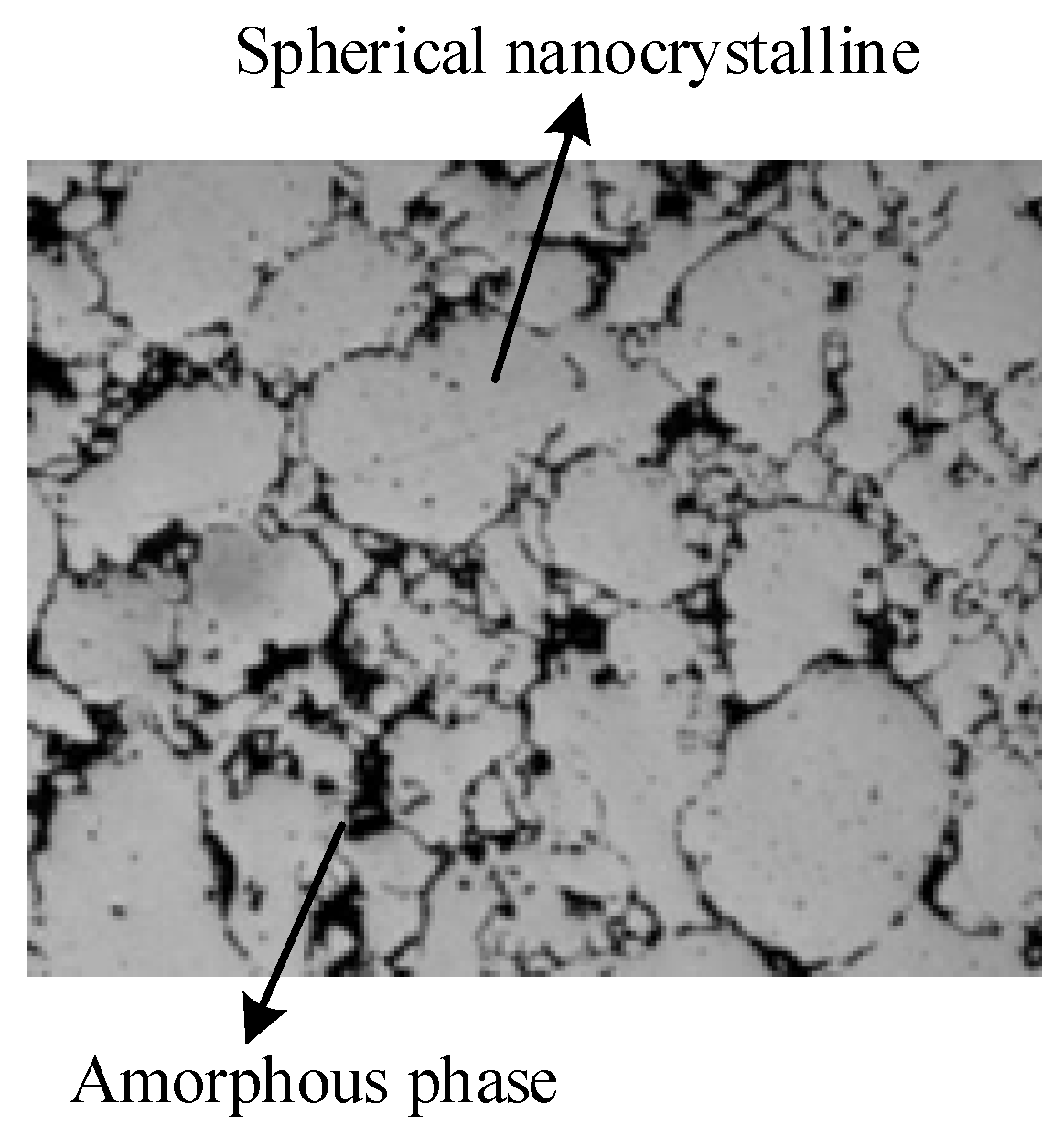
The material simulated in this paper is FINEMET nanocrystalline soft magnetic alloy. Through a ZEISS-40MAT optical microscope [15], it can be observed that the microstructure of the alloy is spherical nanograins of different sizes randomly distributed on the amorphous matrix, as shown in Figure 1.
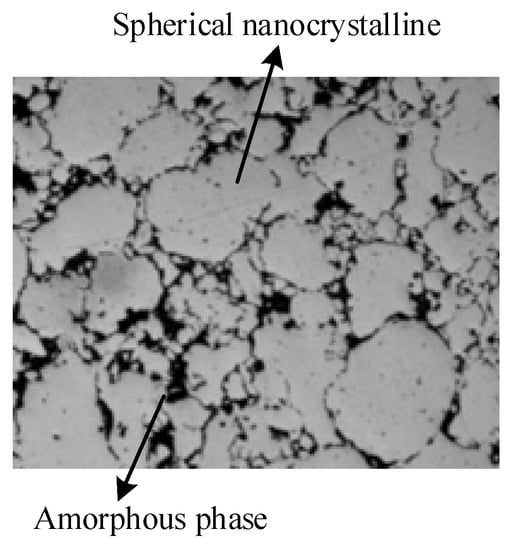
Figure 1.
Microstructure of nanocrystalline alloy.
After studying the microstructure and magnetic properties of FINEMET alloy materials, G. Herzer, a German scholar, proposed the random anisotropy model of nanocrystals [16]. According to Herzer, the microcosmic characteristics of nanocrystalline soft magnetic alloy are that spheroidal nanocrystalline grains with a body-centered cubic structure are dispersed on the amorphous matrix, and the crystallographic orientation (i.e., magneto-crystalline anisotropy direction) is randomly distributed. Based on this model, the physical origin of the excellent soft magnetic properties of nanocrystalline alloys is explained successfully.
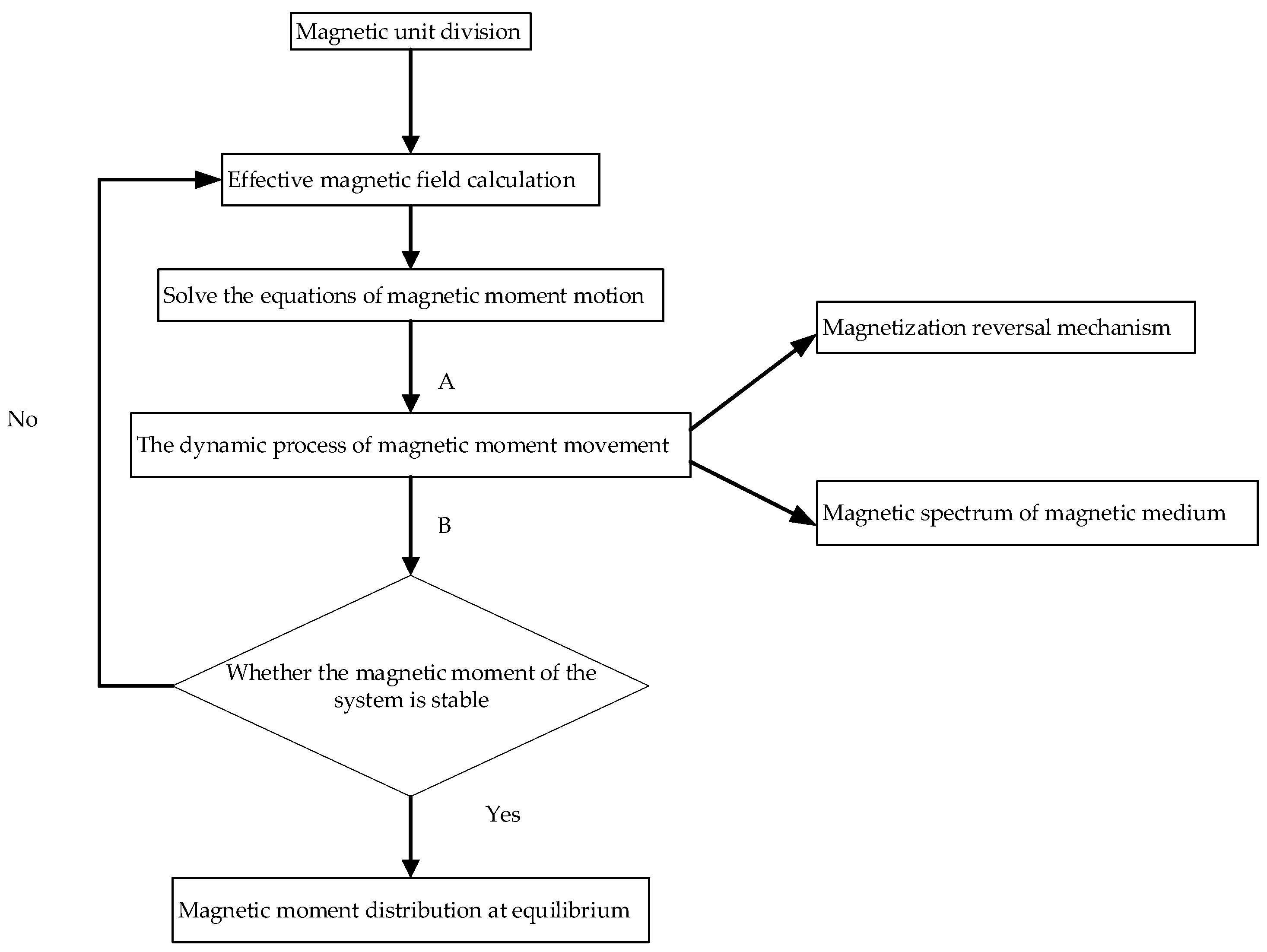
In this paper, the construction process and calculation steps of the micromagnetic model of nanocrystal alloy materials are shown in Figure 2. The details can be summarized as follows:
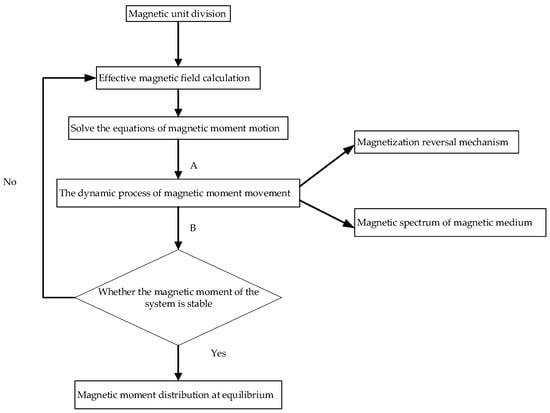
Figure 2.
Calculation steps of the micromagnetic model.
- (1)
- Determine the simulation system. That is, to determine the shape and size of alloy samples to be studied, and according to the actual material system, correctly set the magnetic model with the property parameters, such as saturation strength, exchange constants, magneto-crystal anisotropy constants, etc.
- (2)
- Magnetic unit division. The microcosmic mesoscopic model can take individual particles as basic or select the collection of magnetic particles.
- (3)
- Effective magnetic field calculation. That is, the equivalent magnetic field acting on each element magnetization vector is calculated according to the magnetic environment of the magnetic medium and all magnetic-related energy terms in the material. Under the excitation of this effective magnetic field, the precession of the magnetization vector follows the LLG equation. If we want to know the dynamic evolution process of the magnetic moment, we can solve this dynamic equation to achieve it.
- (4)
- Process A represents dynamic simulation, which is studying the response characteristics of a magnetic moment in a magnetic system to external field.
- (5)
- Process B represents static simulation. That is, studying the magnetic moment distribution of the magnetic system in a stable state. This process can be completed by solving the stable solution of LLG equation.
- (6)
- Check procedure (i.e., MIF document) for unreasonable place, submit procedure.
In order to facilitate modeling, based on G. Herzer’s stochastic anisotropy theory [16], a three-dimensional mesoscopic model of materials was established using micromagnetic simulation software. Table 1 lists the important magnetic parameters involved in the modeling process. Considering that the exchange coupling between the nanocrystalline phase and the residual amorphous phase is strongly dependent on the ferromagnetism of the nanocrystalline phase and the amorphous phase, the exchange coefficient ANano-Amor between the nanocrystalline phase and the amorphous phase can be calculated by Equation (3).

Table 1.
Important magnetic parameters of nanocrystalline alloy materials.
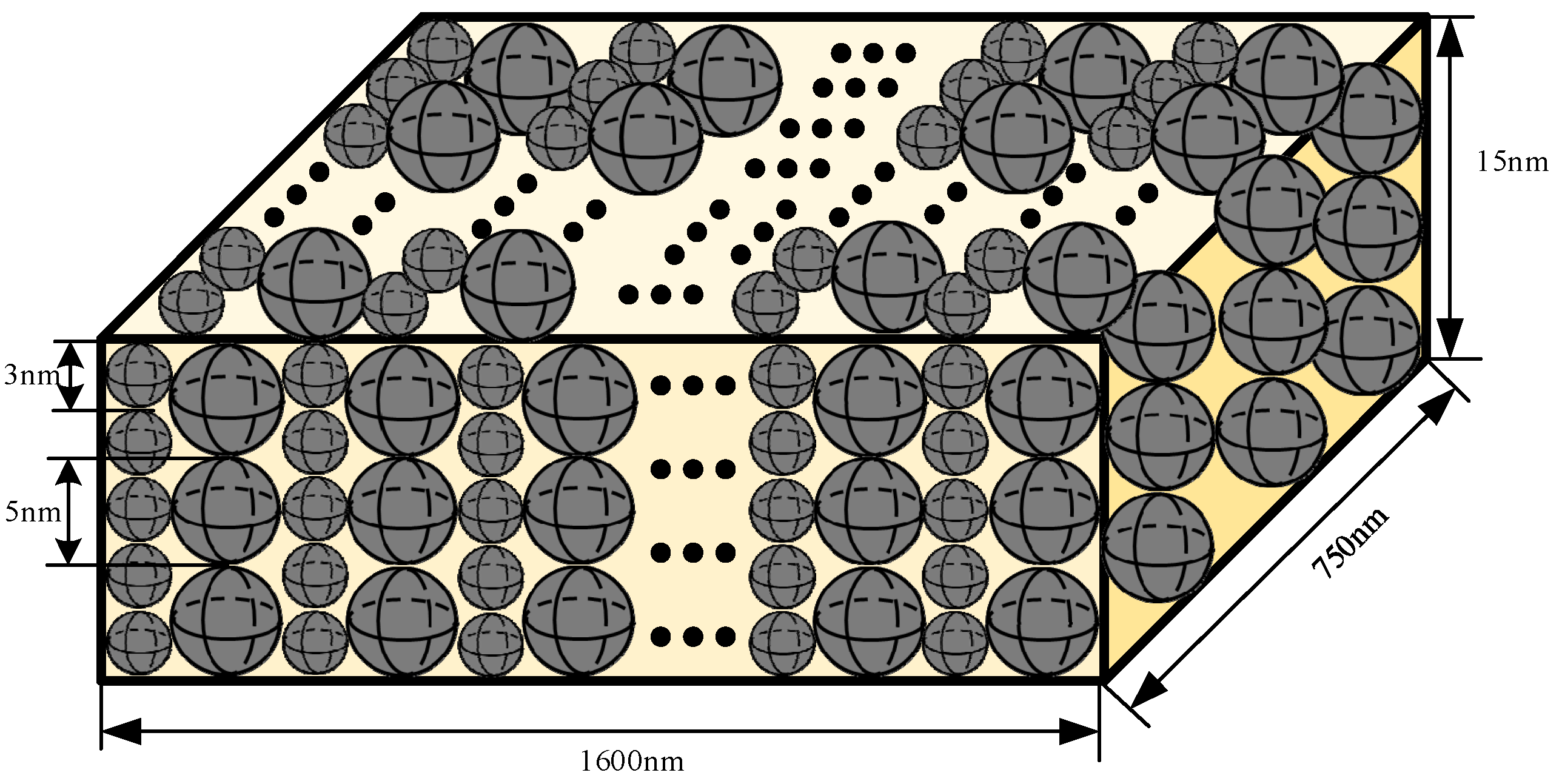
According to the literature, when the material has the best soft magnetic properties, the spherical shape and size of the grain are about 5 nm. Therefore, in the established model, spherical nano grains with diameters of 3 nm and 5 nm are horizontally embedded in the amorphous matrix. At the same time, the following three assumptions were made during model establishment.
- (1)
- The magneto-crystalline anisotropy constant of the residual amorphous phase is considered to be zero because it contains no crystal structure.
- (2)
- In the agglomerated phase, spherical nanocrystals are uniformly embedded in the residual amorphous phase, and the ferromagnetic exchange between the nanocrystals is realized through the coupling of the amorphous phase.
- (3)
- In order to minimize the energy of the magnetic system, the grains in the model tend to be arranged in parallel.
The three-dimensional mesoscopic model of the material is shown in Figure 3. As can be seen from Figure 3, in the established model, spherical nano grains with diameters of 3 nm and 5 nm are horizontally embedded in the amorphous matrix. The overall size of the model is 1600 nm × 750 nm × 15 nm.
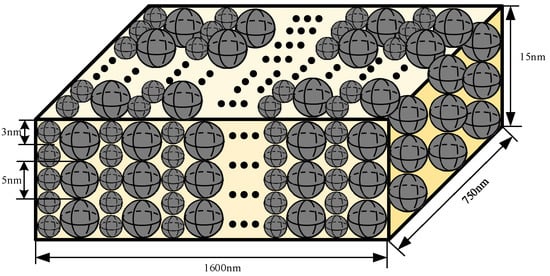
Figure 3.
Three-dimensional mesoscopic model.
2.2. Model Static Characteristic Parameter Calculation
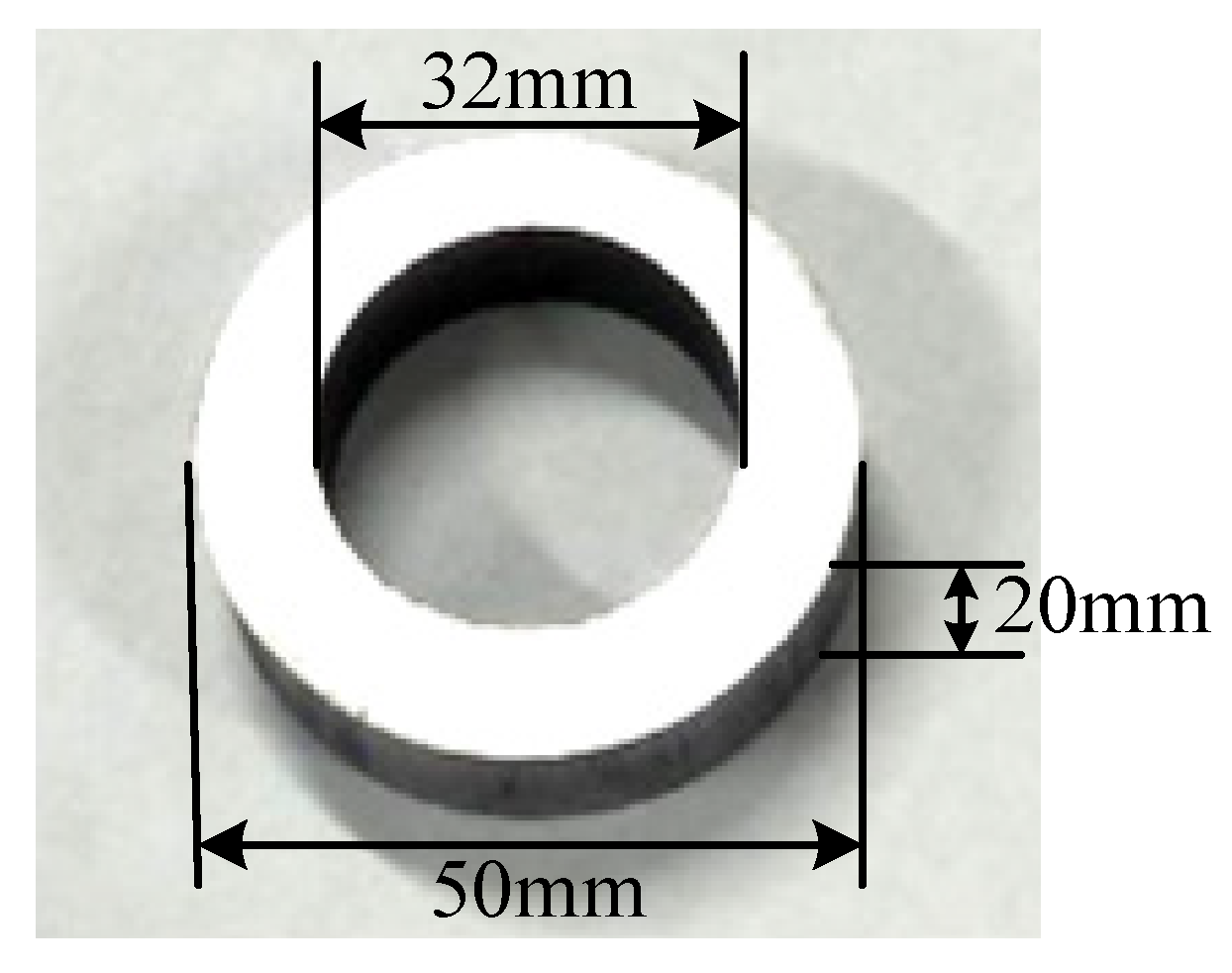
In order to verify the correctness of the model, the main DC magnetic properties (static characteristic parameters) of nanocrystalline soft magnetic alloy were tested by a direct magnetic testing system that is produced by the Magnetic Measurement Laboratory of China National Institute of Metrology (model: NIM-2000S). Including static saturated magnetic field Hs, saturation magnetic induction intensity Bs and coercivity Hc. The test ring is shown in Figure 4. Its dimensions are: inner circle diameter = 32 mm, outer circle diameter = 50 mm and thickness h = 20 mm. Finally, the static characteristic parameters of the nanocrystalline soft magnetic alloy are as follows: static saturated magnetic field Hs is 225 kA/m, saturation magnetic induction intensity Bs is 1.24 T and coercivity Hc is 310 A/m [15].
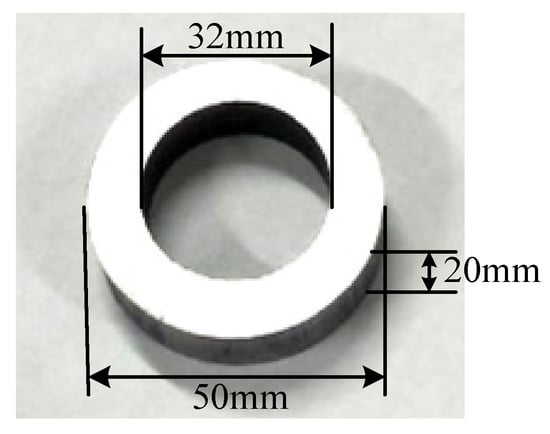
Figure 4.
Ring for magnetic testing.
Then a static magnetic field of −1 T to +1 T was applied to the established micromagnetic model, and the initial magnetization curve and hysteresis loop of the model were obtained, as shown in Figure 5 and Figure 6.
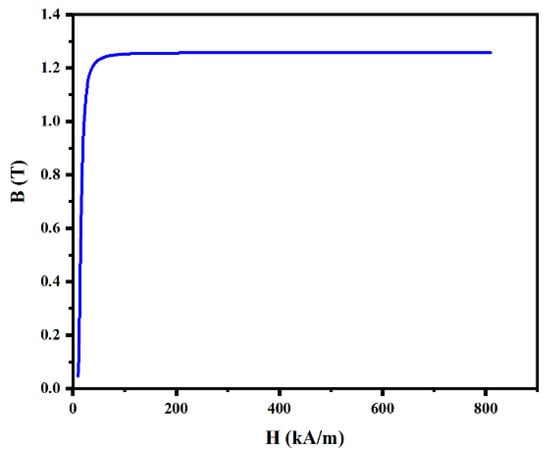
Figure 5.
Initial magnetization curves.
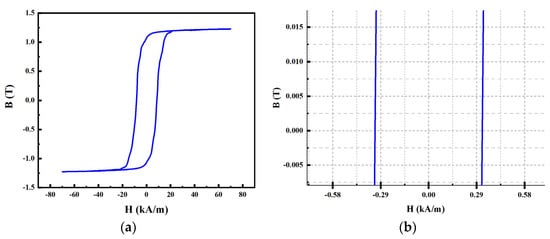
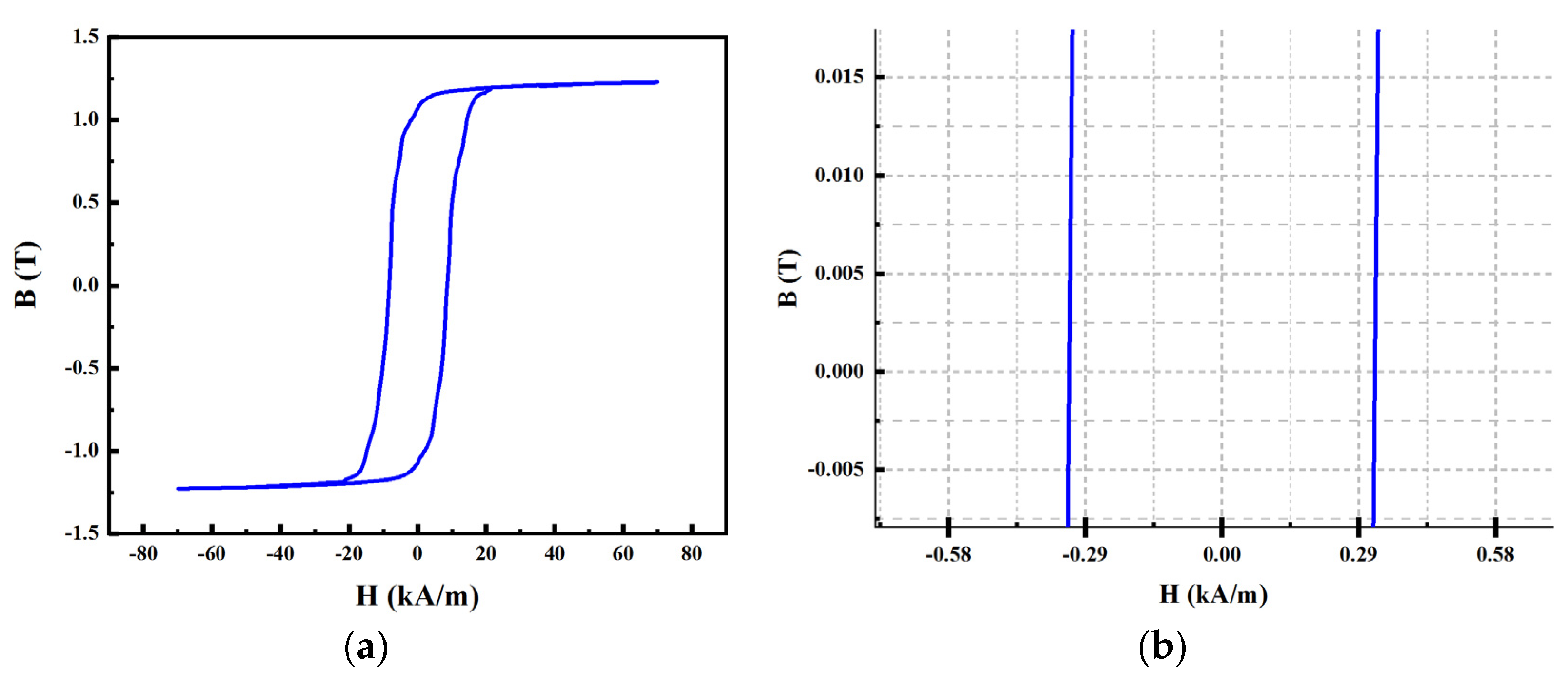
Figure 6.
Hysteresis loops: (a) Hysteresis loop; (b) Local magnification of hysteresis loop.
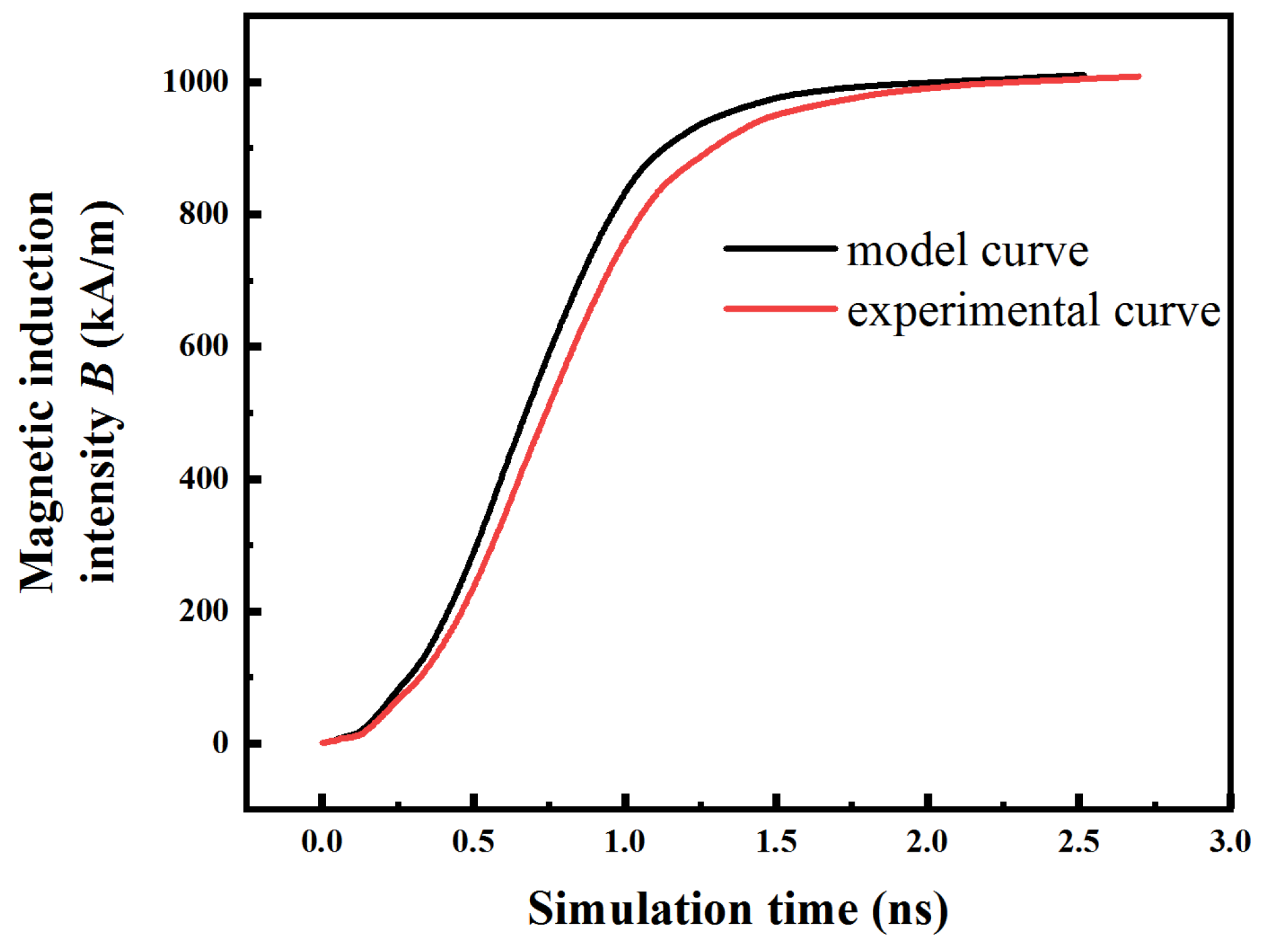
It can be observed from Figure 5 that when the external magnetic field of the nanocrystalline soft magnetic alloy is 220 kA/m, the material tends to be saturated, that is to say, the static saturated magnetic field Hs of the material is 220 kA/m. At the same time, the saturation magnetic intensity Bs of the material is 1.247 T. It can be observed from Figure 6 that when the magnetic induction intensity is 0, the applied magnetic field is about 307 A/m, that is, the coercivity Hc is 307 A/m. Table 2 compares the calculated data of the model with the experimental data of nanocrystalline soft magnetic alloys. Meanwhile, the magnetization curve obtained through the modeling tool is presented and compared with the experimental curve, as shown in Figure 7.
Table 2.
Comparison of calculation data and experimental data.
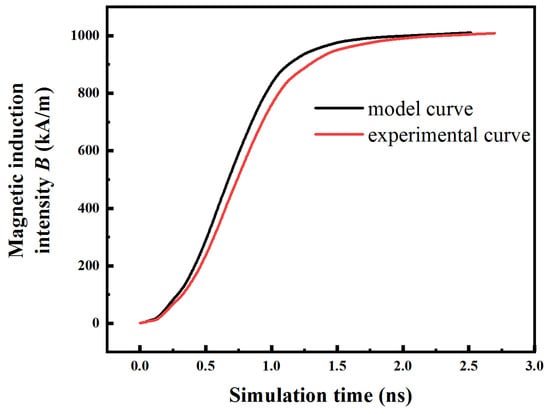
Figure 7.
Comparison between model curve and experimental curve.
It can be seen from the table and figure that the static magnetic characteristic parameters of the model are not much different from the experimental data, so the model can be considered to be true and reliable.
3. Saturation Magnetization Parameter
3.1. Magnetic Moment Deflects Angular Velocity
The tiny region of spherical iron powder and glass insulation layer in the material is considered as a ferromagnetic unit with a few magnetization vectors and easy magnetization axes, which is represented by the unit magnetization vector m, and its definition can be written as follows:
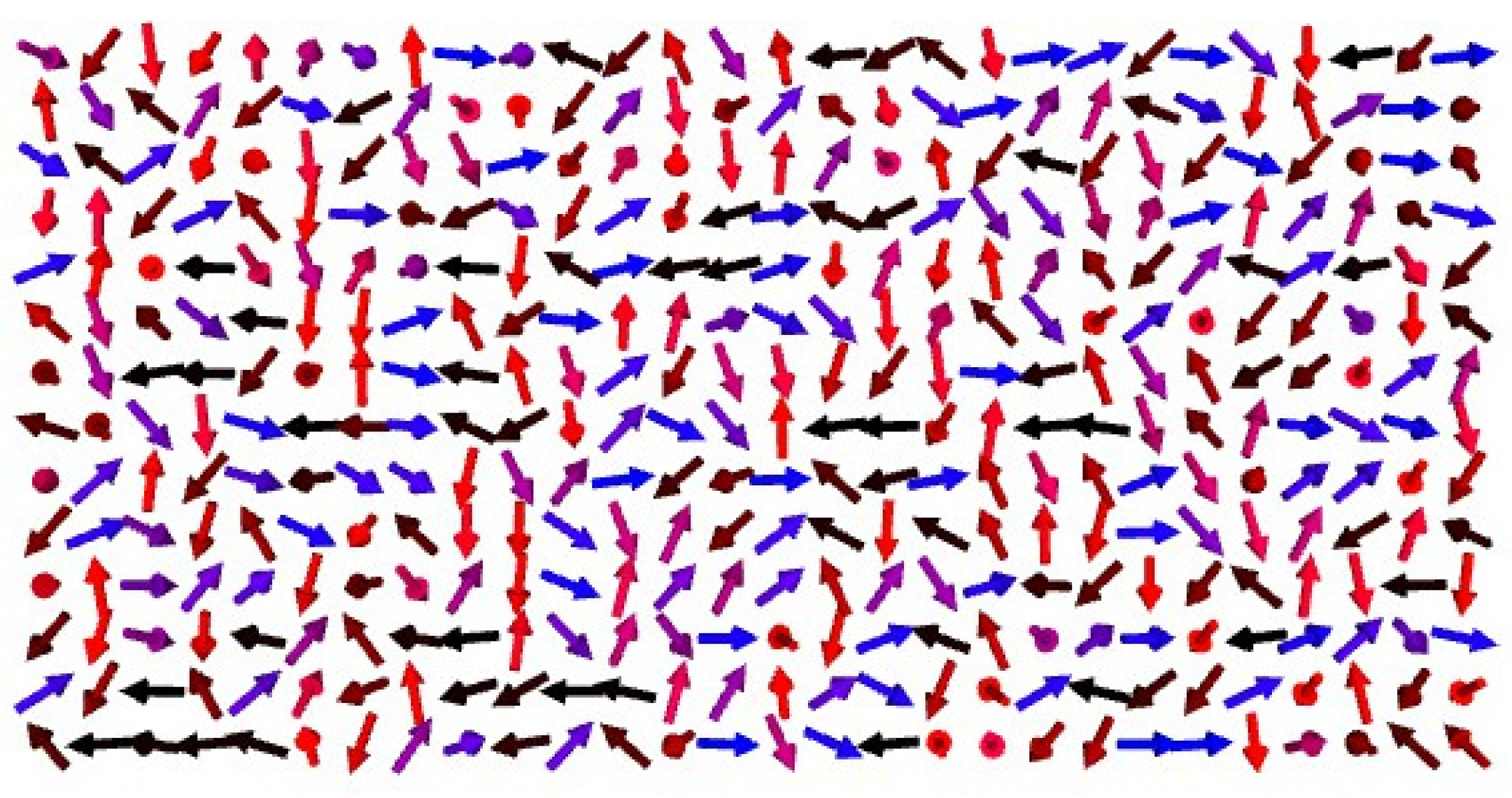
where, M is magnetization and Ms is the saturation magnetization value. In order to facilitate analysis, a high-frequency alternating magnetic field is applied to the model during simulation. Through the graphics output module of the software the initial stage of material magnetization it can be observed. In the case of no external magnetic field, the magnetic moment of the system is random on the micro level and does not show magnetism externally on the macro level. The state distribution of magnetic moment at the initial stage of the material is shown in Figure 8.
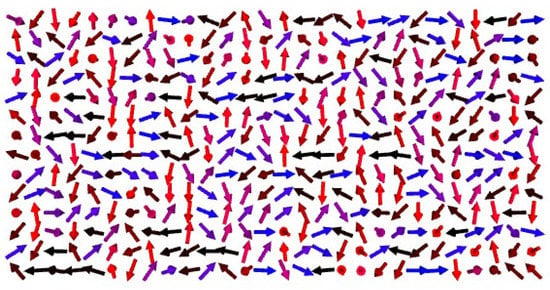
Figure 8.
Initial magnetic moment distribution diagram.
It can be seen from Figure 8 that in the initial state, the magnetic moment of the material is randomly distributed, where the unit magnetic moment is represented by an arrow. Here, → represents the positive direction of the X-axis, and vice versa; ↑ represents the positive Y direction, and vice versa. When the arrow is blue, it is deflected to the positive X-axis, when it is black, it is deflected to the negative X-axis and when it is red, it is deflected to the Y-axis. When the external magnetic field is applied to the material, the magnetic moment begins to deflect, which is mainly manifested as: the magnetic moment whose initial direction is closer to the direction of the external magnetic field is deflected first, and first deflects to the same direction as the external magnetic field. Therefore, the region within the system composed of these magnetic moments that are first deflected reaches saturation earlier. Figure 9 shows the distribution of the unit magnetization vector m in different directions during material magnetization.
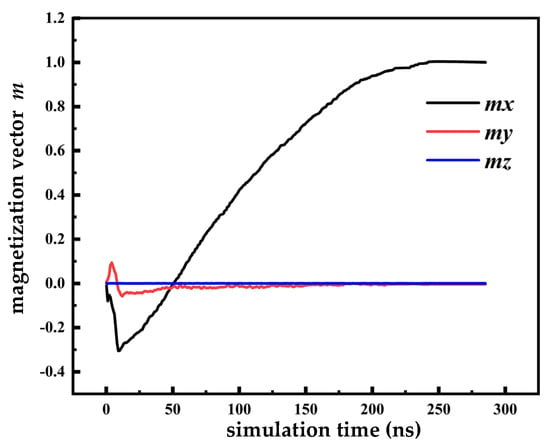
Figure 9.
The distribution of unit magnetization vector m in different directions.
As can be seen from the figure, mx at the beginning of the simulation time decreases and the value of my increases and then decreases. This is because the magnetic field strength is not enough to compete with the magnetocrystalline anisotropy field inside the material. When the magnetic moment deviates from the direction of the material’s easily magnetized axis, the magnetic moment is acted on by an equivalent magnetic field along the easily magnetized axis. Deflect the magnetic moment in the direction of the easily magnetized axis. Specifically, in the magnetization process, part of the magnetic moment is first reversely deflected to the X-axis direction and then forward deflected to the external magnetic field direction.
Meanwhile, magnetization vector m is mainly distributed on X-axis during the whole magnetization process, and mx reaches the maximum at saturation, accounting for as much as 97.49%. At the same time, compared with mz, the proportion of my in magnetization is relatively higher. Therefore, the subsequent research on magnetic moment deflection mainly focuses on the xy plane. According to the magnetization mechanism of ferromagnetic materials, when the flux density of the excitation field is low, the magnetization mechanism of ferromagnetic materials is mainly characterized by the displacement of domain walls. With the increase in the external magnetic field, the displacement of the domain wall is almost complete, and the magnetization mechanism of ferromagnetic materials changes to domain rotation. When the external magnetic field continues to increase to a certain extent, the domain wall displacement and domain rotation have been basically completed, which means that the magnetization of ferromagnetic materials remains unchanged and tends to saturation.
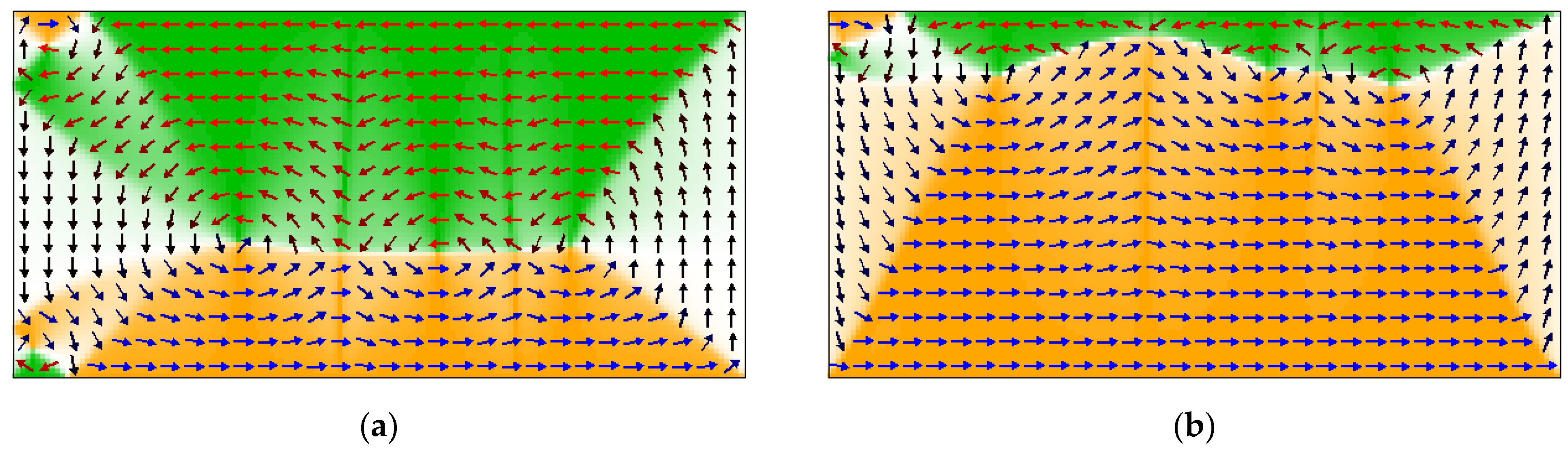
The domain wall displacement and domain rotation of nanocrystalline soft magnetic alloys are shown in Figure 10. The arrow in the figure is the unit magnetic moment. The color of the arrow represents the angle between the magnetic moment and the direction of the external magnetic field. A blue color means in the same direction as the external magnetic field, red means in the opposite direction and black means perpendicular to the external magnetic field. The colors of the magnetic domains are orange and green, with orange representing the direction of the external magnetic field and green representing the direction opposite to the external magnetic field. Therefore, during the magnetization of the material, the color of each magnetic moment always transitions from red to black and finally to blue. Accordingly, the magnetic domains change from green to orange.
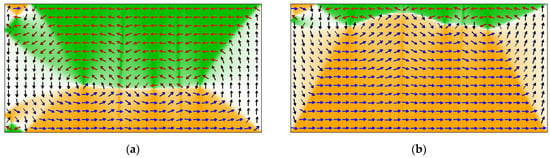
Figure 10.
Domain wall displacement and domain rotation of materials: (a) Initial stage of magnetization; (b) Saturation stage of magnetization.
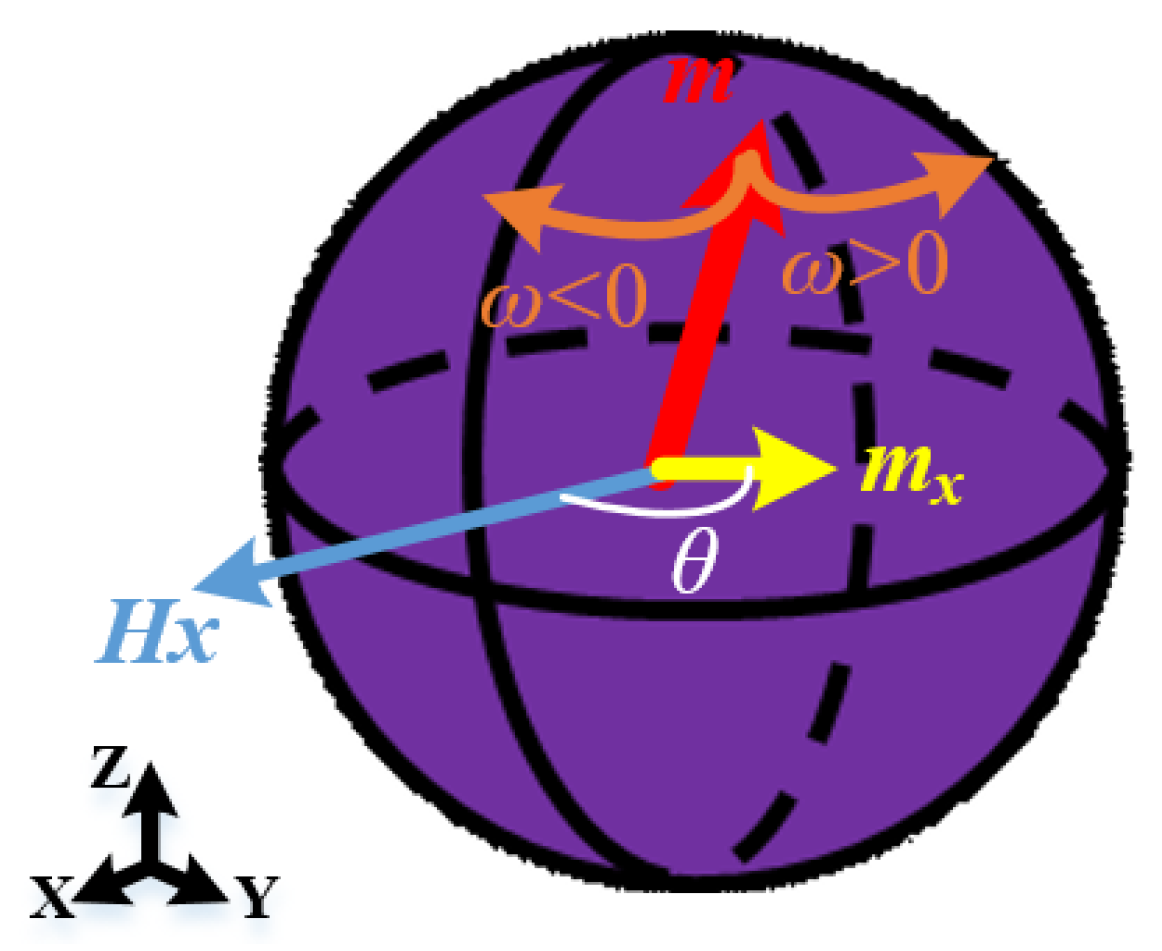
Therefore, the magnetic domain rotation in the process of material magnetization is studied by defining the magnetic moment deflection angular velocity ω, which is defined as follows:
where θ is the angle between the unit magnetic moment and the external magnetic field in units of rad (unless otherwise specified, the magnetic field applied in this paper is in the X-axis direction, that is, the positive X-axis direction), and the value ranges from 0 to π. t is the simulation time, in units of ns. ω is the magnetic moment deflection angular velocity in units of rad/ns.
It can be seen from Figure 11 that for any unit magnetic moment, ω < 0 means that the unit magnetic moment deviates from the direction of the external magnetic field, ω > 0 means that the unit magnetic moment deviates from the direction of the external magnetic field.
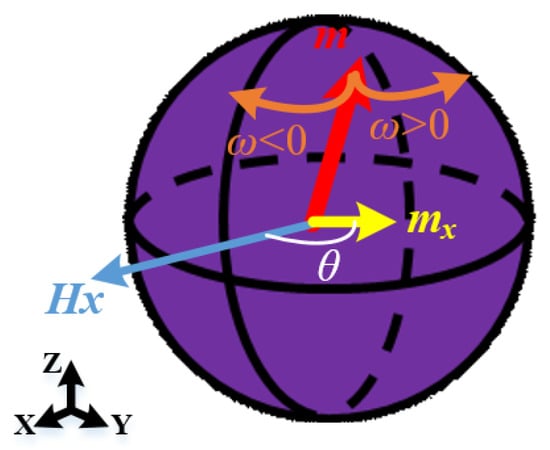
Figure 11.
Definition of angular velocity of deflection.
3.2. Magnetization Rate
When magnetic materials are magnetized, magnetic moment deflection and domain wall displacement are two dominant magnetization mechanisms. This means that when the external magnetic field changes, the magnetic moment and magnetic domain wall inside the material change, which is manifested as the change of magnetic induction intensity of the material at a macro level. In order to describe the effect of the magnetic moment deflection of materials in the process of high-frequency magnetization from a macro level, the magnetization curve of nanocrystalline soft magnetic alloy during magnetization was measured using an AC measuring device. The magnetization rate v is defined as the change rate of the magnetization intensity vector with time when the material is magnetized. The calculation formula is as follows:
where B represents the magnetic induction intensity of the material in units of kA/m, t represents the simulation time in units of ns and v is the magnetization rate of the material, in units of kA/(m×ns).
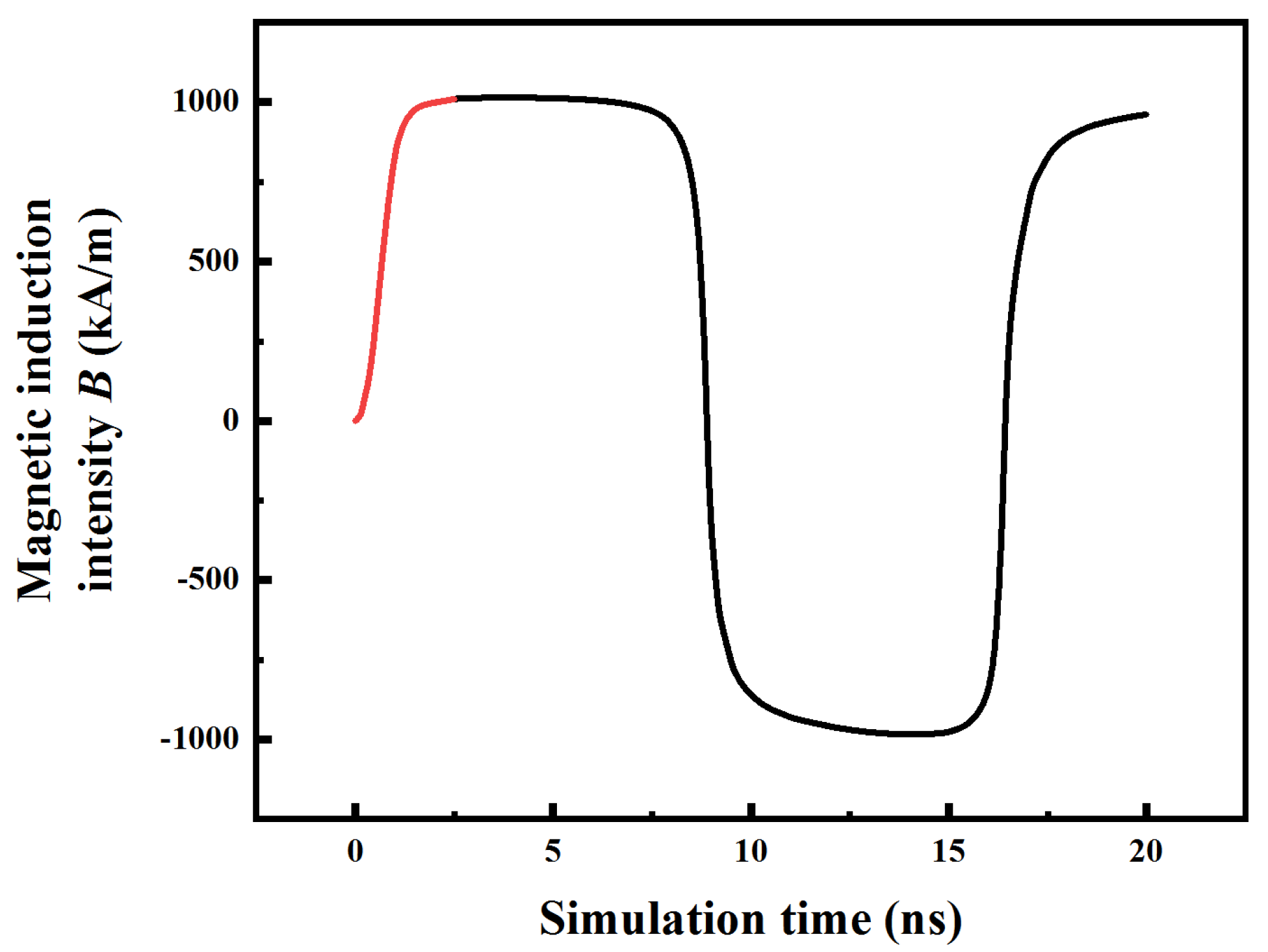
The magnetization curve of the material was measured by applying a high-frequency alternating magnetic field to the test ring through the signal source, as shown in Figure 12.
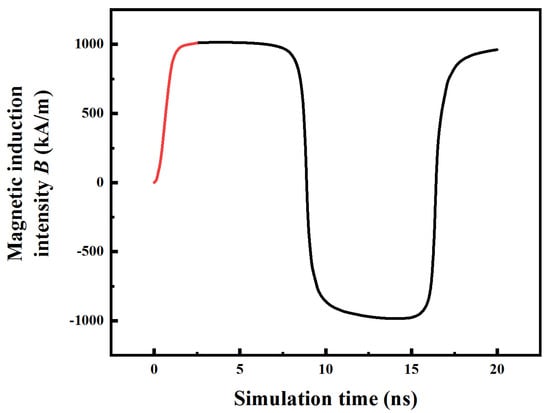
Figure 12.
Dynamic magnetization curve of the material.
In order to facilitate data analysis, the magnetization rate v defined in this paper is the rate from the first magnetization of the material to saturation, which is the red part in Figure 12.
4. Influence of Alternating Magnetic Field on the Magnetization Process
4.1. Influence of Alternating Magnetic Fields on ω
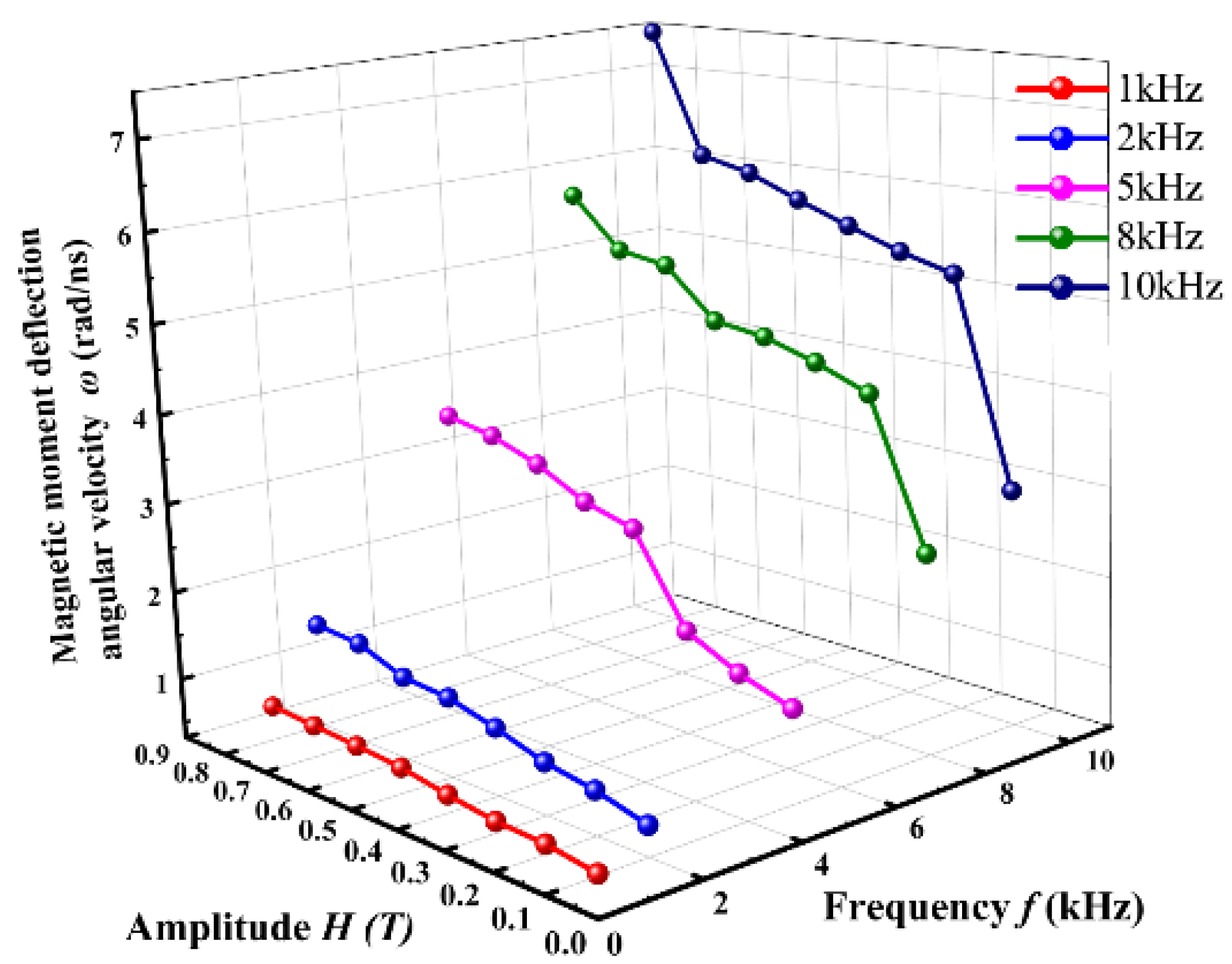
Previous studies have shown that magnetic moment deflection is mainly concentrated in the xy plane. Therefore, in the simulation process of exploring the magnetization saturation process of materials by an alternating magnetic field, an alternating magnetic field with a frequency f of 1 kHz–10 kHz and an amplitude H of 0.1 T–0.8 T was applied upwards in the square of X-axis. In the process of simulation, the distribution diagram of magnetic moment during magnetization is output through the graphical interface function of the software. Next, the included angle between each unit magnetic moment and the positive X-axis in the figure is calculated by the coordinates of the magnetization vector m. Then, take the arithmetic average of all the angles obtained to get the θ value at the corresponding time. Finally, the included angles at all times can be obtained by repeating the above steps, and the deflection angular velocity ω of the magnetic moment can be obtained through calculation of Equation (2). Table 3 lists the value of magnetic moment deflection angular velocity ω of material under the excitation of an alternating magnetic field, frequency f is 1 kHz–10 kHz and amplitude H is 0.1 T–0.8 T. Based on the data in Table 3, the variation curves of magnetic moment deflection angular velocity ω and alternating magnetic field frequency f and amplitude H are drawn, as shown in Figure 13.
Table 3.
Magnetic moment deflection angular velocity ω of materials under different alternating magnetic fields.
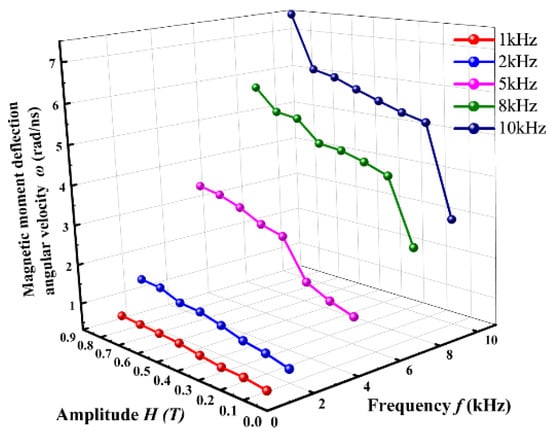
Figure 13.
The variation curve of magnetic moment deflection angular velocity ω and alternating magnetic field frequency f and amplitude H.
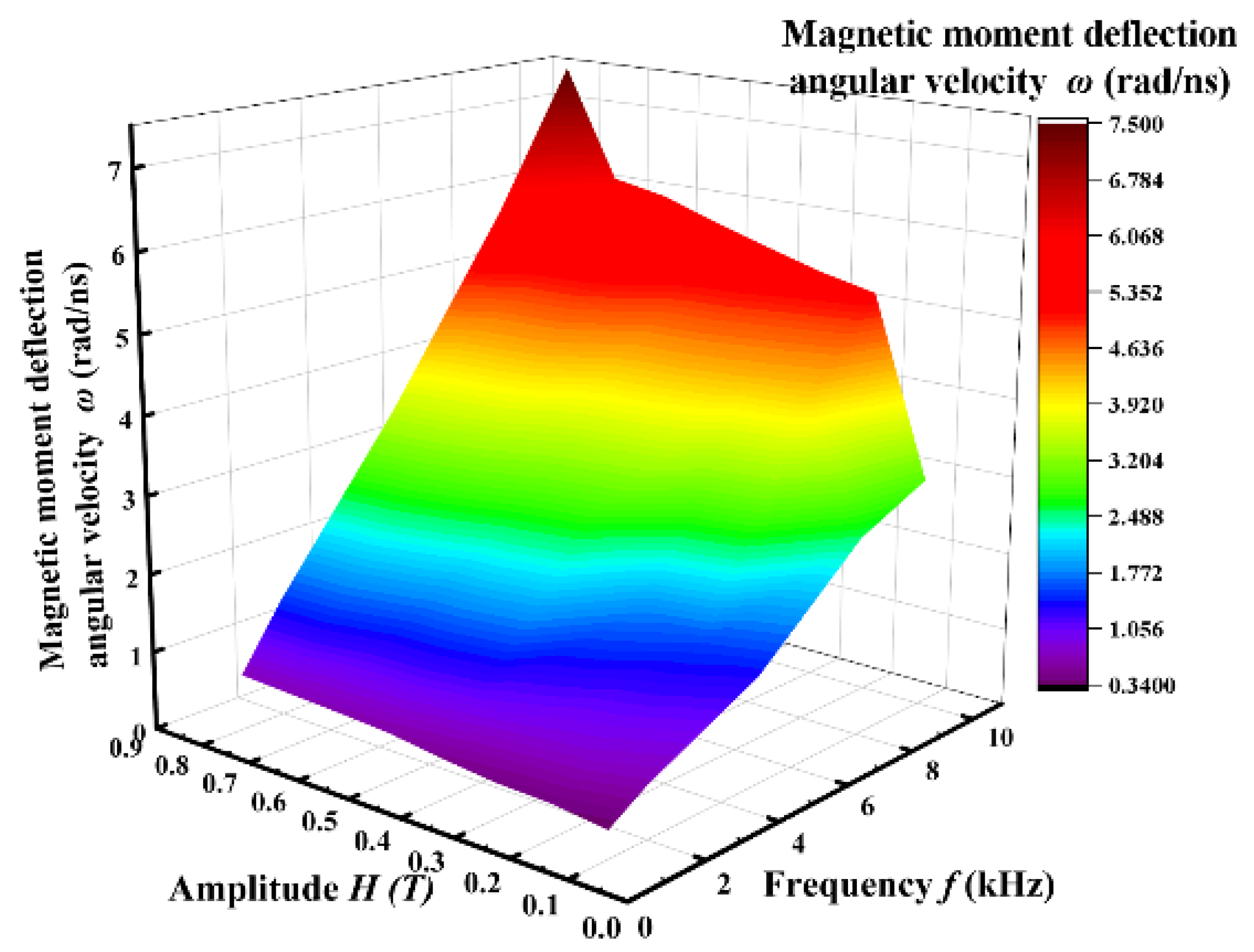
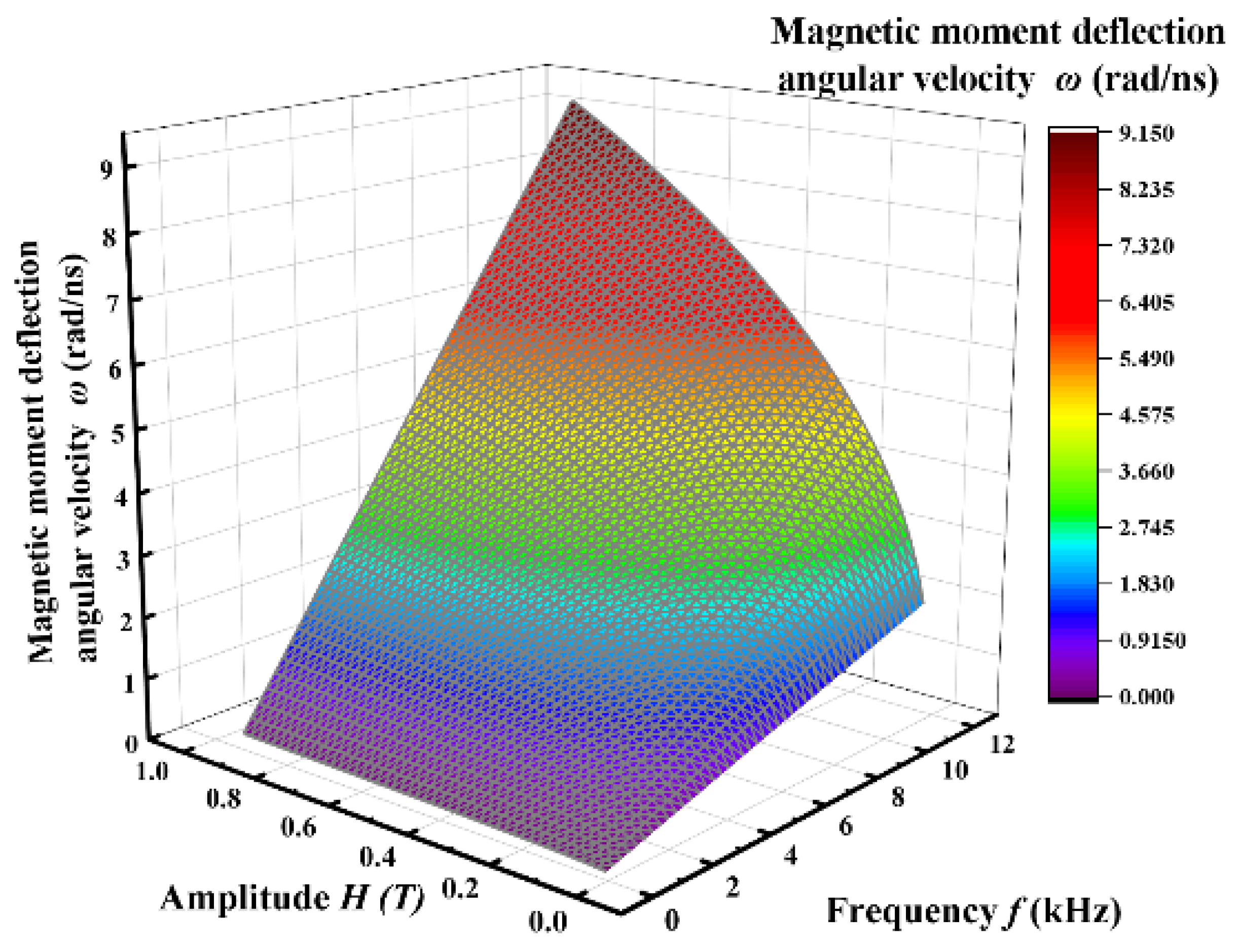
Figure 14 shows the three-dimensional surface where each curve in Figure 13 is located. It can be seen from Figure 14 that the deflection angular velocity ω is positively correlated with the frequency f and amplitude H of the alternating magnetic field. In addition, when the frequency f of the alternating magnetic field increases gradually, the effect of increasing magnetic moment deflection velocity ω is particularly significant. When the external magnetic field frequency f remains constant (1 kHz) and the amplitude H increases from 0.1 T to 0.8 T, the magnetic moment deflection angular velocity ω increases from 0.32 rad/ns to 0.73 rad/ns, with a growth rate of 128.1%. However, when the external magnetic field amplitude H remains unchanged (0.8 T) and frequency f increases from 1 kHz to 10 kHz, the magnetic moment deflection angular velocity ω increases from 0.73 rad/ns to 7.5 rad/ns, with a growth rate of 927.4%. Compared with the increase of amplitude H, the increase effect of frequency f on the increase of magnetic moment deflection velocity ω is particularly significant, and the increase rate of frequency f is about 7.24 times the increase rate of amplitude H.
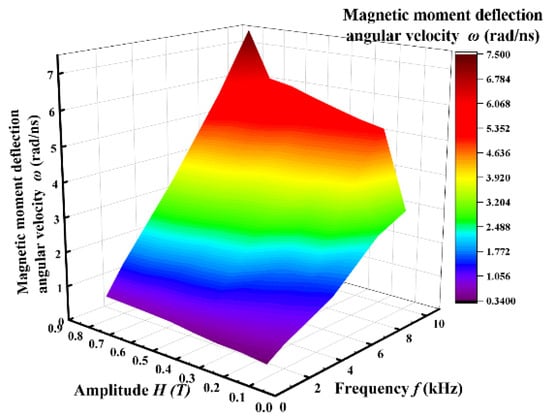
Figure 14.
Three-dimensional surface of magnetic moment deflection angular velocity ω and alternating magnetic field frequency f and amplitude H.
These phenomena can be explained by magnetic moment dynamics. Through the LLG equation of micromagnetism it can be concluded that under the action of the effective field Heff the magnetization vector m will be affected by torque T. Under the action of the moment T, the angular momentum G, corresponding to the deflection angular velocity ω will change, and the calculation formula is as follows:
where μ0 is the vacuum permeability and the value is 4π × 10−7 H/m and Heff is the effective field, that is, the external magnetic field applied. It can be concluded from the formula that an increase in the external magnetic field means that the effective field directly acting on the magnetic moment deflection increases, that is, the force of magnetic moment deflection towards the magnetic field directly increases.
The external magnetic field applied in this paper is a standard sine wave. The higher the frequency is, the smaller the period is. The alternating magnetic field can reach its peak in a short time. The size of the effective magnetic field is closely related to the force of magnetic moment deflection, so the increase in frequency has a particularly significant effect on the increase in magnetic moment deflection angular velocity ω.
First, the three-dimensional surface diagram between was drawn through the data in the Table 3, as shown in Figure 14. Then nonlinear surface fitting was selected, and the Levenberg–Marquardt optimization algorithm was selected for the iterative algorithm. Finally, the functional relation between the deflection angular velocity ω and frequency f and amplitude H of an alternating magnetic field was obtained, as shown in Equation (5). According to the fitting results, the sum of the squares of residual errors is 3.49, and the mean square error is 0.094. Then the corresponding 3D surface is drawn using Equation (5), as shown in Figure 15.
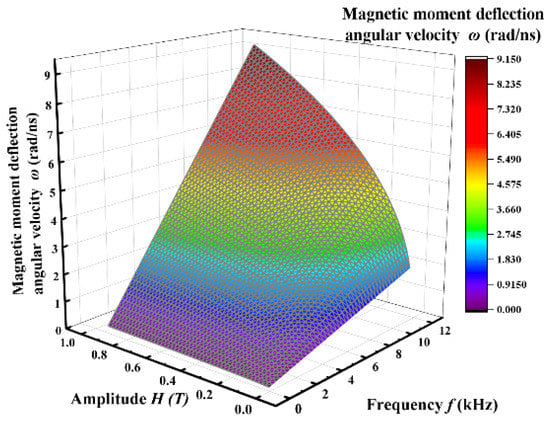
Figure 15.
Fitting surface of magnetic moment deflection angular velocity ω and alternating magnetic field frequency f and amplitude H.
It can be found from the formula that the coefficient of frequency f is much larger than that of amplitude H, about 2.5 times that of amplitude H, indicating that frequency f has a more significant effect on the deflection angular velocity ω, which is consistent with the analysis of the previous figure.
4.2. Influence of Alternating Magnetic Fields on v
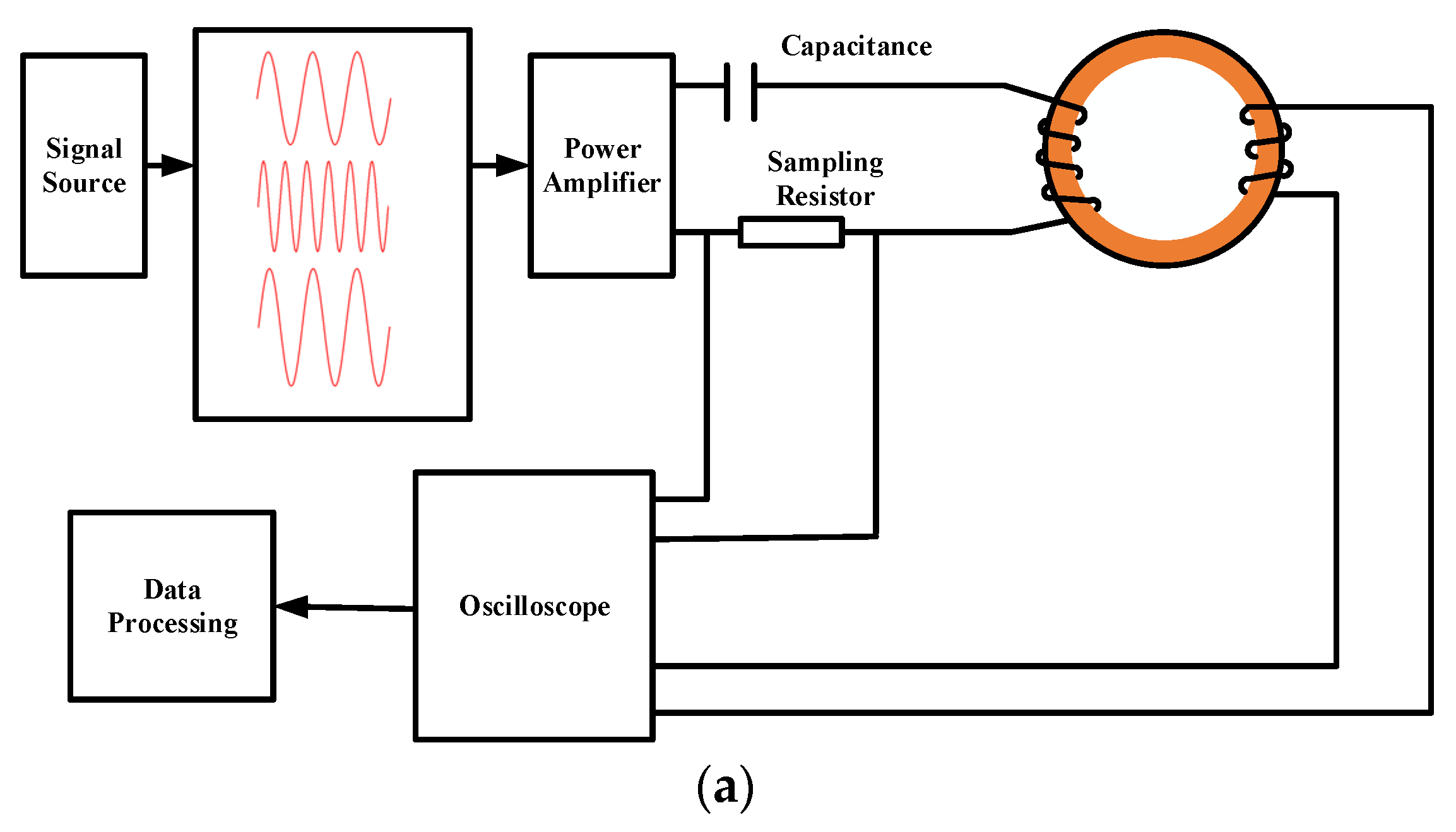
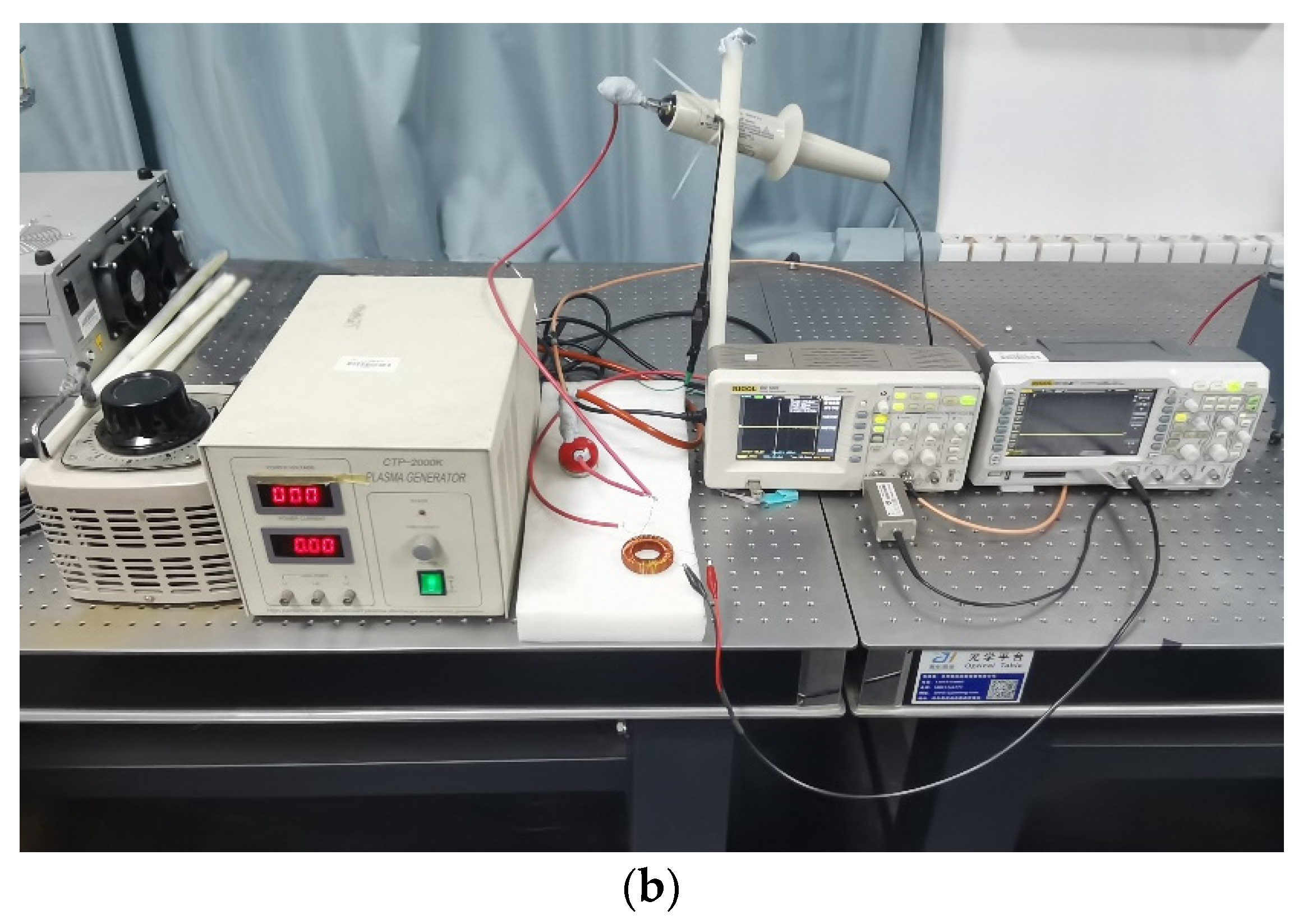
In order to explore the influence of alternating magnetic field on the saturation process of nanocrystalline soft magnetic alloy, the magnetization curve of material during magnetization was measured by a measuring device, as shown in Figure 16. The test system shown in Figure 16 is mainly composed of an excitation module, test module and data processing module. The excitation module is composed of a signal source and a power amplifier. The signal source is used to generate sinusoidal alternating magnetic fields with different frequencies and amplitudes that are amplified by the power amplifier and applied to the original side of the test sample. The test module is composed of the test sample and a capacitor in series that can isolate the DC signal to reduce the measurement error. The voltage probe is located at both ends of the sampling resistance and the secondary winding, which can measure the voltage of the primary side and the induced voltage of the secondary side. The oscilloscope is used to display the collected data and transmit it to the computer for processing.
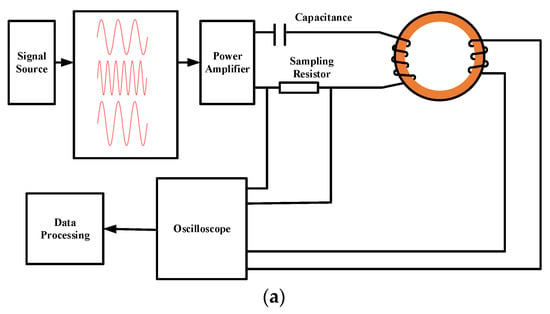
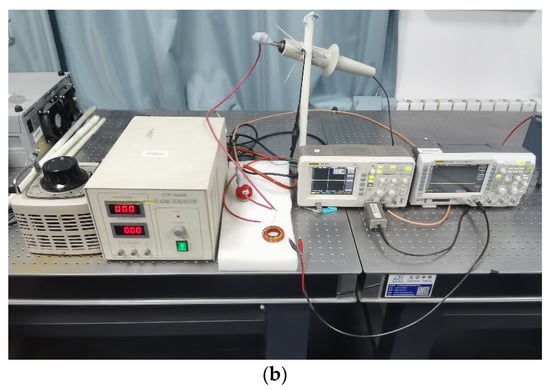
Figure 16.
Test system installation diagram. (a) Schematic diagram. (b) Real figure.
According to Formula (3), the magnetization rate v of the material can be calculated. Table 4 lists the magnetization rate v of the material under the excitation of an alternating magnetic field with a frequency f of 1 kHz–10 kHz and amplitude H of 0.1 T–0.8 T, and draws the change curves of the three according to the numerical values, as shown in Figure 17.
Table 4.
Magnetization rate v of materials under different alternating magnetic fields.
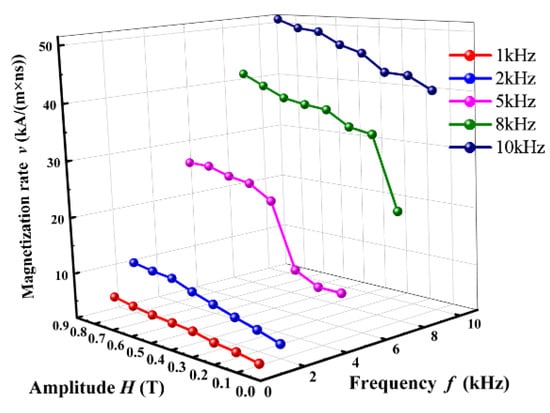
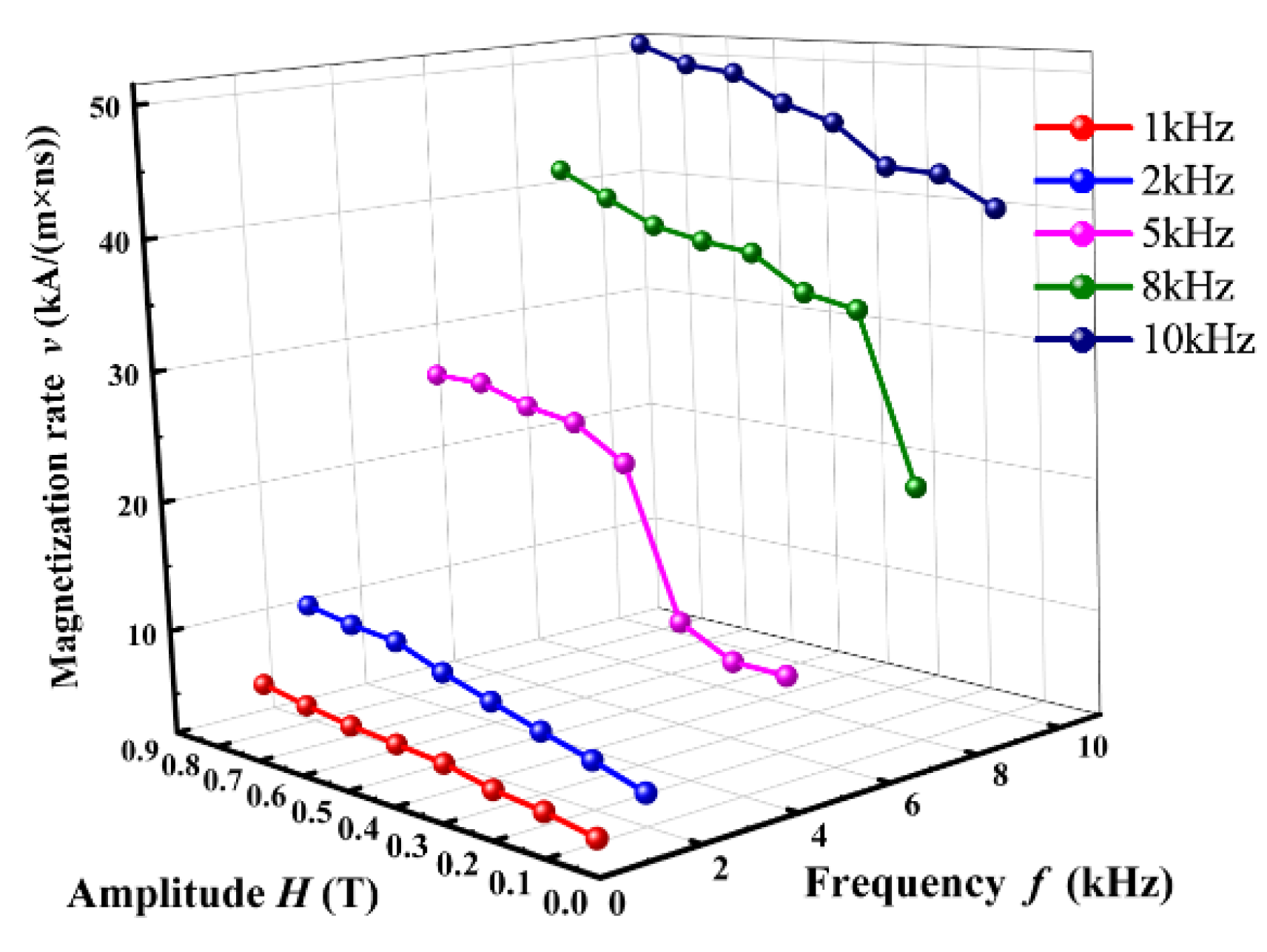
Figure 17.
The variation curve of magnetization rate v and alternating magnetic field frequency f and amplitude H.
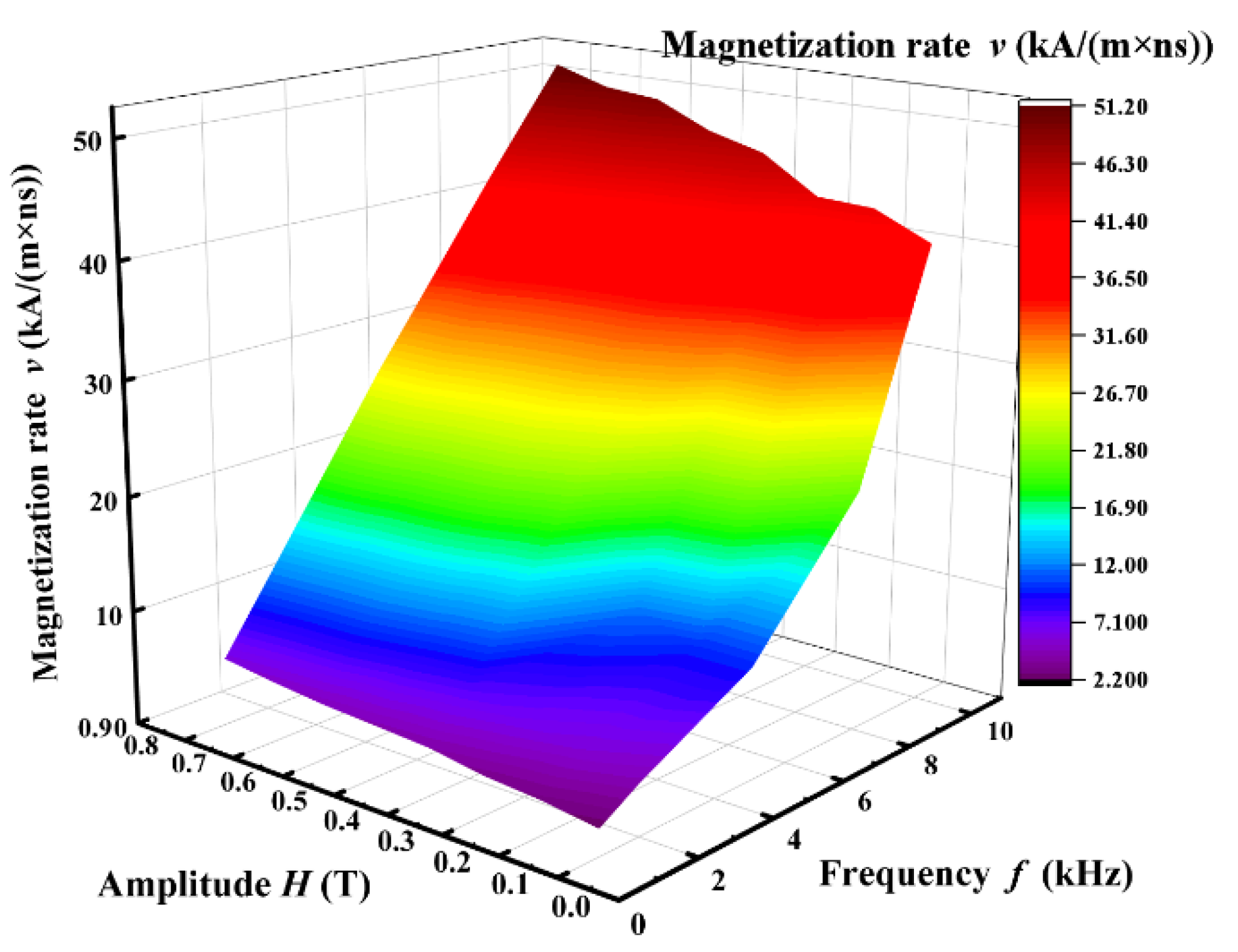
Figure 18 shows the three-dimensional surface where each curve in Figure 17 is located. It can be seen from Figure 18 that magnetization rate v is positively correlated with the frequency f and amplitude H of the alternating magnetic field. In addition, when the frequency f of the alternating magnetic field increases gradually, the effect of increasing magnetization rate v is particularly significant. When the external magnetic field frequency f remains constant (1 kHz) and the amplitude H increases from 0.1 T to 0.8 T, the magnetization rate v increases from 2.31 kA/(m×ns) to 5.86 kA/(m×ns), a growth rate of 153.7%. However, when the external magnetic field amplitude H remains unchanged (0.8 T) and the frequency f increases from 1 kHz to 10 kHz, the magnetization rate v increases from 5.86 kA/(m×ns) to 51.09 kA/(m×ns), a growth rate of 771.8%. The increase rate of magnetization rate v with increasing frequency f is about 5.02 times of that with increasing amplitude H.
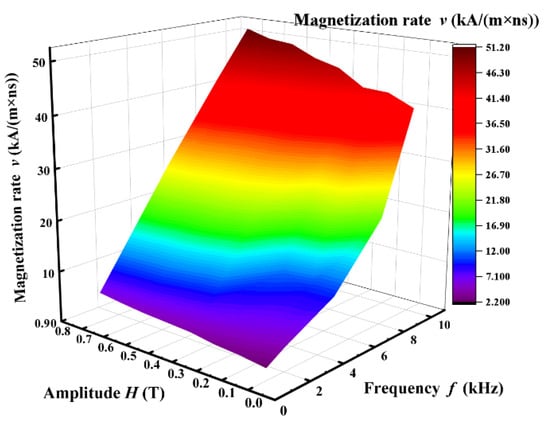
Figure 18.
Three-dimensional surface of magnetization rate v and alternating magnetic field frequency f and amplitude H.
The reason for the above phenomenon is similar to the reason for the deflection angular velocity ω. When the external magnetic field changes, the internal magnetic moment changes when the material is magnetized, and eventually leads to the change in the magnetic induction intensity of the material.
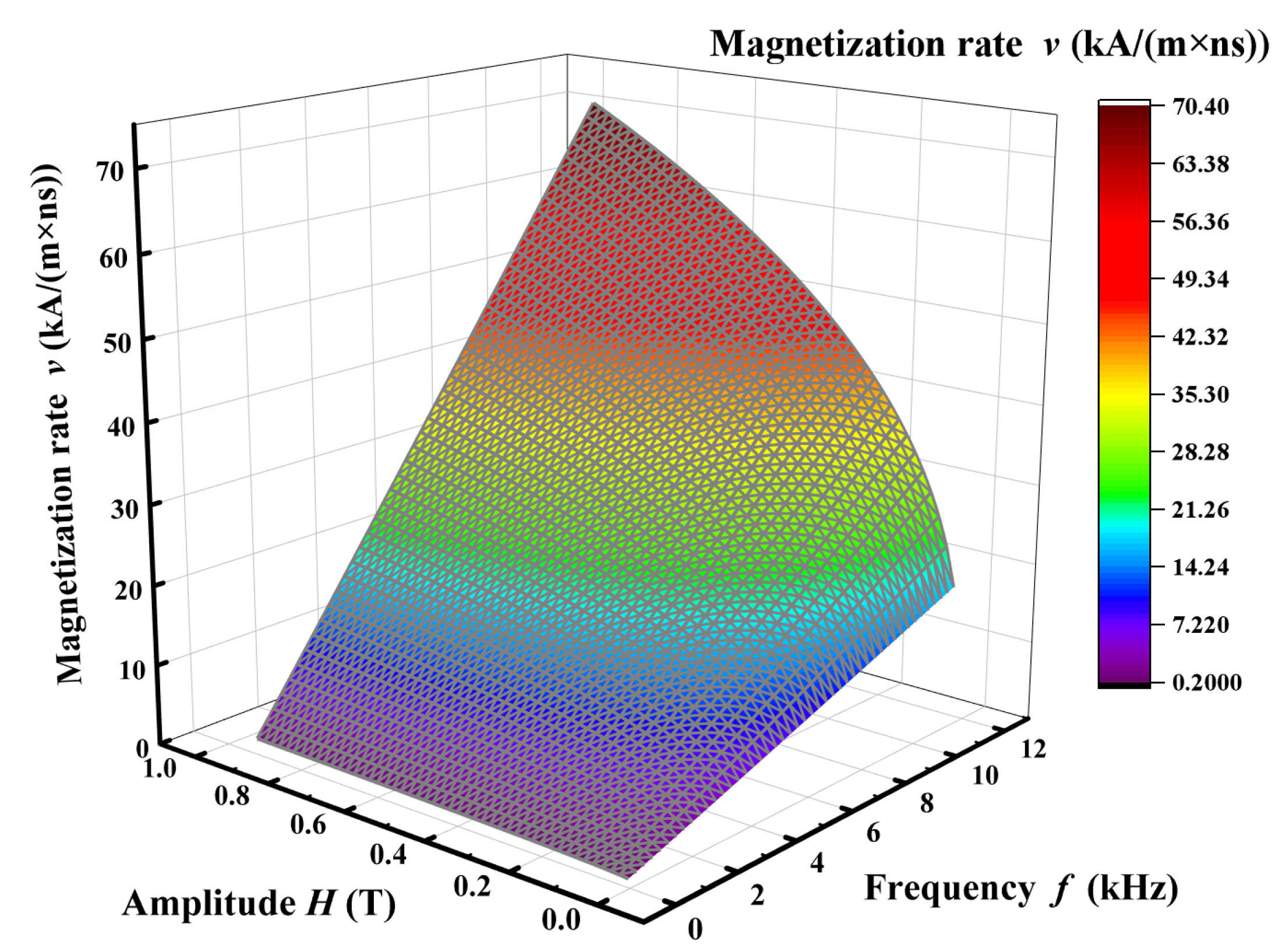
Similar to the magnetic moment deflection angular velocity processing, nonlinear surface fitting was selected, and the Levenberg–Marquardt optimization algorithm was selected for the iterative algorithm. Finally, the functional relation between the magnetization rate v and the frequency f and amplitude H of the alternating magnetic field was obtained, as shown in Equation (6). According to the fitting results, the sum of the squares of residual errors is 3.29, and the mean square error is 0.089. The corresponding 3D surface is drawn using Equation (6), as shown in Figure 19.
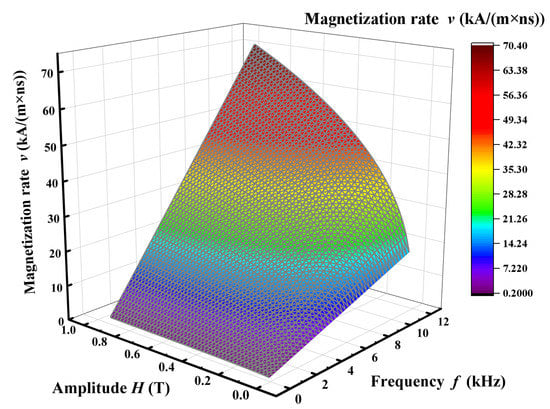
Figure 19.
Fitting surface of magnetization rate v with alternating magnetic field frequency f and amplitude H.
It can be found from the formula that the coefficient of frequency f is much larger than that of amplitude H, about 2.75 times that of amplitude H. This shows that frequency f has a more significant effect on the magnetization rate v, which is consistent with the previous analysis of deflection angular velocity ω and frequency f and amplitude H of the alternating magnetic field. In addition, the multiple of frequency f relative to amplitude H in the function relation between the two is approximately the same. Among them, the multiple of deflection angular velocity ω is 2.5, the multiple of magnetization rate v is 2.75, and the relative error between the two is 9.1%. This is because when the external magnetic field changes, the magnetization vector m inside the material only deflects the magnetic moment whose initial direction is close to the direction of the external magnetic field, and it first deflects to the same direction as the external magnetic field, and only a partial saturation region appears inside the system. In addition, the magnetization curve describes the change in the overall magnetic induction strength of the material. At the same time, due to the measurement error of the test device and system, the measurement error of only the oscilloscope is as high as 4.67%, the measured magnetization rate v and magnetic moment deflection angular velocity ω have a certain deviation.
5. Conclusions
In this paper, a three-dimensional model of nanocrystalline soft magnetic alloy at the mesoscopic scale is established. The static magnetic properties of the samples were measured using a DC magnetic testing system and compared with the simulation data to verify the correctness of the model. Then, taking the magnetic moment deflection angular velocity ω as the research parameter, the magnetic moment deflection in the magnetization process was quantitatively investigated from the microscopic level, and the functional expressions of ω with H and f were obtained. Finally, the magnetization curve of the material during magnetization was measured by the measuring device, and the magnetization rate v was defined to quantitatively explore the change in magnetic induction intensity B in the magnetization process of the material at the macro level. The functional relation between v and H and f is obtained, and compared with the functional relation between ω and H and f, the micro and macro two-way verification is realized, and the conclusion is as follows:
- (1)
- For the magnetic moment deflection angular velocity ω, ω is positively correlated with f and H. Moreover, when the f of the alternating magnetic field increases gradually, the increasing effect of ω is particularly significant. This is because the size of the effective magnetic field is closely related to the force of magnetic moment deflection. Under the excitation of the standard sine wave, the higher the frequency, the smaller the period and the alternating magnetic field can reach the peak in a relatively short time. Therefore, the increase in frequency has a particularly significant effect on the increase in ω.
- (2)
- For the magnetization rate v, similar to the magnetic moment deflection angular velocity ω, the magnetization rate v is positively correlated with f and H, and when the frequency f of the alternating magnetic field increases gradually, the effect of increasing magnetization rate v is particularly significant. This is because changes in the external working conditions lead to changes in the internal magnetic moment deflection of the material when it is magnetized, which is macroscopically manifested as changes in the overall magnetic induction intensity of the material, thus changing the magnetization rate v.
- (3)
- The fitting toolbox of MATLAB is used to fit the simulation data and the functional relations between ω, v and the alternating magnetic fields f and H are obtained. In the function relation between ω, v and the alternating magnetic field, the coefficient of f is much larger than the coefficient of H. Among them, the coefficient of f in the function relation between ω and f and H is about 2.5 times that of H. The coefficient of f in the functional relationship between v and f and H is about 2.75 times that of H. Multiples of the two are approximately the same, with a relative error of only 9.1%, and the error is analyzed. In addition, the verification between micro and macro is realized.
Author Contributions
Conceptualization, K.G.; Data curation, L.Z. (Liang Zou); Formal analysis, L.Z. (Li Zhang); Investigation, L.D. All authors have read and agreed to the published version of the manuscript.
Funding
This work was supported by National Natural Science Foundation of China (51977122) and the State Key Laboratory of Alternate Electrical Power System with Renewable Energy Sources (Grant No. LAPS22003).
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Liu, C.; Inoue, A.; Kong, F.L.; Zanaeva, E.; Bazlov, A.; Churyumov, A.; Zhu, S.L.; Al-Marzouki, F.; Shull, R.D. Fe-B-Si-C-Cu amorphous and nanocrystalline alloys with ultrahigh hardness and enhanced soft magnetic properties. J. Non-Cryst. Solids 2021, 554, 68–72. [Google Scholar] [CrossRef]
- Jia, X.; Zhang, B. Direct synthesis of Fe-Si-B-C[sbnd]Cu nanocrystalline alloys with superior soft magnetic properties and ductile by melt-spinning. J. Mater. Sci. Technol. 2022, 108, 186–195. [Google Scholar] [CrossRef]
- Guo, F.; Zhang, T. Mechanisms of hydrides’ nucleation and the effect of hydrogen pressure induced driving force on de-/hydrogenation kinetics of Mg-based nanocrystalline alloys. Int. J. Hydrog. Energy 2022, 47, 1063–1075. [Google Scholar] [CrossRef]
- Zhang, Z.; Liu, X. Effect of Hydrogenation on the Glass Formation Ability and Magnetic Properties of the Fe79Si9B6Nb5Cu1 Amorphous Nanocrystalline Alloys. J. Supercond. Nov. Magn. 2022, 35, 935–940. [Google Scholar] [CrossRef]
- Li, Y.; Jia, X.; Zhang, W.; Zhang, Y.; Xie, G.; Qiu, Z.; Jiao, Z. Formation and crystallization behavior of Fe-based amorphous precursors with pre-existing α-Fe nanoparticles—Structure and magnetic properties of high-Cu-content Fe-Si-B-Cu-Nb nanocrystalline alloys. J. Mater. Sci. Technol. 2021, 65, 171–181. [Google Scholar] [CrossRef]
- Zhang, C. Three-Dimensional Magnetic Properties Measurement and Electromagnetic Finite Element Simulation of Coupled Hysteresis and Anisotropy for Electrical Soft Magnetic Materials; Hebei University of Technology: Tianjin, China, 2016. [Google Scholar]
- Zhi, Q.Z.; Dong, B.S.; Chen, W.Z.; He, K.Y. Elevated temperature initial permeability study of Fe73.5Cu1Nb3Si13.5B9 alloy. Mater. Sci. Eng. 2007, A448, 249–252. [Google Scholar] [CrossRef]
- Wu, J. Micromagnetic Analysis of Mesoscopic High-Frequency Saturation Mechanism of Nanocrystalline Alloys. Master’s Thesis, Shandong University, Jinan, China, 2018. [Google Scholar]
- Han, Z.; Zou, L.; Wu, J.; Zhang, L.; Zhao, T. Micromagnetic analysis of influence of external and internal factors on saturation magnetization of Nanocrystalline alloys at kHz level. Trans. China Electron. Tech. Soc. 2019, 34, 1589–1598. [Google Scholar]
- Flourentzou, N.; Agelidis, V.G.; Demetriades, G.D. VSC-based HVDC power transmission systems: An overview. IEEE Trans. Power Electron. 2009, 24I, 592–602. [Google Scholar] [CrossRef]
- Kenzelmann, S.; Rufer, A.; Dujic, D.; Canales, F.; De Novaes, Y.R. Isolated DC/DC structure based on modular multilevel converter. IEEE Trans. Power Electron. 2015, 30, 89–98. [Google Scholar] [CrossRef]
- Schöbinger, M.; Schöberl, J.; Hollaus, K. Multiscale FEM for the Linear 2-D/1-D Problem of Eddy Currents in Thin Iron Sheets. IEEE Trans. Magn. 2019, 55, 7400212. [Google Scholar] [CrossRef]
- Kim, M.K.; Sim, J. Dynamical Origin of Highly Efficient Energy Dissipation in Soft Magnetic Nanoparticles for Magnetic Hyperthermia Applications. Phys. Rev. Appl. 2018, 9, 054037. [Google Scholar] [CrossRef]
- Lekdim, A.; Morel, L.; Raulet, M.A. Effect of the remaining magnetization on the thermal ageing of high permeability nanocrystalline FeCuNbSiB alloys. J. Magn. Magn. Mater. 2006, 460, 125–128. [Google Scholar] [CrossRef]
- Liu, D.; Zhao, T.; Zhang, M.; Wang, L.; Xi, J.; Shen, B.; Sun, J. Exploration of nontrivial topological domain structures in the equilibrium state of magnetic nanodisks. J. Mater. Sci. 2021, 56, 4677–4685. [Google Scholar] [CrossRef]
- Herzer, G. Modern soft magnets: Amorphous and nanocrystalline materials. Acta Mater. 2013, 61, 718–734. [Google Scholar] [CrossRef]


Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).