1. Introduction
Since the energy of traditional wireless sensor nodes is limited, and it is difficult to replace the battery in many application scenarios, this directly leads to a great limitation on the life of wireless sensor networks (WSNs) [
1]. The emergence of battery-free wireless sensor networks can effectively solve the above-mentioned energy limitation problem [
2,
3]. Battery-free sensor nodes are equipped with energy harvesting devices, which can obtain energy from the surrounding environment for power supply, such as wind energy [
4], solar energy [
5], radio frequency signals [
6], etc., while eliminating the demand to replace batteries. The potential application fields of battery-free WSNs are very wide, such as agricultural environmental monitoring [
7], natural disaster prevention [
8], smart manufacturing [
9], and so on, especially in the application scenarios where the batteries of sensors are not easy to replace. However, the characteristics of energy harvesting and storage also bring greater challenges to wireless communication in battery-free WSNs.
Data aggregation, as a common data processing technology in WSNs, can effectively reduce the amount of data and the number of data packets that need to be transmitted [
10], and finally decrease the communication load and energy consumption. It is mainly achieved by combining data information from multiple sources into one output [
11]. In addition, the application of multi-channel technology can effectively reduce communication conflicts, in which nodes just only need to switch channels under certain conditions, so that network performance can be further improved [
12].
How to control the wireless communication time and achieve the goal of reducing the latency of data aggregation is an important and typical research problem in WSNs. Time Division Multiple Access (TDMA) technology is one of the most popular ways to implement the control of communication time in WSNs [
13]. Inspired by the principle of TDMA, the time and channel can be viewed as scheduling resources to be allocated for sensor nodes in the multi-channel mode [
14]. The communication period (or data collection period) is divided into a certain number of time slots with the exact same time lengths, where the specified nodes are permitted to perform wireless communication. The research problem of this paper involves how to efficiently allocate the respective time slot and wireless channel for each node, and construct a conflict-free multi-channel data aggregation scheduling in battery-free WSNs to maximize the network performance. The main contribution of this paper can be summarized as follows:
Multi-channel technology was added into the data aggregation scheduling in battery-free WSNs for the first time. None of the existing data aggregation scheduling methods in WSNs considered the same network scenarios before. In this case, the scheduling task allocates both the time slot and channel for each node, rather than only the time slot.
The problems surrounding multi-channel data aggregation scheduling for battery-free WSNs were analyzed and formulated. The optimization objective was evaluated by the fitness function, and the constraints for the feasible scheduling set were expressed in the corresponding mathematical model.
The chaotic firework algorithm was implemented into the multi-channel data aggregation scheduling method for battery-free WSNs. Scheduling sets are represented by the firework individuals; the firework population continuously evolves to discover better solutions. A chaotic map function was integrated into the solution optimization process, thereby enhancing the global search capability.
The employment of Internet of Things (IoT) technology is an essential part of Agriculture 4.0, where sensors replace the human monitoring of the objective and environment [
15,
16]. This characteristic makes Agriculture 4.0 one of the most possible application fields in the proposed scheduling method. The existing research studies on Agriculture 4.0 have focused on the application of energy harvesting technology in recent years [
17,
18], such as using solar energy [
19], but the problem of how to realize conflict-free wireless communication with low transmission latency has not been adequately discussed until now. However, with the help of the proposed scheduling method, WSNs can simultaneously utilize energy harvesting and multi-channel technology without considering communication conflict problems, thereby the capability of the Agriculture 4.0 system is enhanced, and more application scenarios could be supported.
The rest of the paper is organized as follows:
Section 2 discusses the existing research studies related to the topic of this paper.
Section 3 introduces the target system model and illustrates the problem to be solved.
Section 4 illustrates the principle and components of the proposed multi-channel data aggregation scheduling method.
Section 5 presents the theoretical analysis for the complexity and the convergence of the proposed method.
Section 6 presents the simulation platform and analyzes the simulation result in order to prove the performance advantages of the proposed method. Finally,
Section 7 concludes the current works.
2. Related Works
The vast majority of existing research studies on data aggregation scheduling focus on traditional WSNs with a single wireless channel [
13,
20]. Few researchers pay attention to the multi-channel mode and battery-free sensor nodes. Until now, none of these research studies have put both conditions into the network environment for data aggregation scheduling.
Multi-channel TDMA scheduling algorithms—aimed at minimizing the total energy consumption in a network—were proposed by S. Kumar et al. [
21]. Multiple RF channels were utilized to alleviate collisions and support concurrent communications in this work. Even though only sub-optimal schedules for data gathering could be obtained, this heuristic algorithm offers computationally efficient scheduling operations. Bagaa et al. developed a cross-layer trusted data aggregation scheduling method for multi-channel WSN [
22]. K-disjoint paths were constructed for each source node to the sink node according to the aggregation tree in this method (a conflict-free communication schedule could then be generated). Jiao et al. utilized the candidate activity conflict and feasible activity conflict graph to describe the node scheduling relationship [
23], and proposed the graph coloring method to achieve efficient scheduling. Ren M. et al. proposed a cluster-based distributed data aggregation scheduling algorithm with multi-power and multi-channels [
24], where the network nodes were put into multiple clusters; different power levels were used for inner cluster communications and the communications among cluster heads separately. A conflict-free TDMA link scheduling method [
25] was proposed by Lee et al. to minimize the time slot lengths of multi-channel wireless multi-hop wireless sensor networks, where the min–max method is used to optimize the time slot length, and the sorting algorithm is used to minimize the end-to-end delay.
T. Zhu et al. proposed a data aggregation scheduling method in battery-free WSNs [
26]; the minimum latency aggregation scheduling (MLAS) problem in battery-free WSNs were investigated and proved as non-deterministic polynomial (NP)-hard; they finally constructed the scheduling set according to an aggregation tree. The distributed energy-adaptive aggregation scheduling method with a coverage guarantee was proposed by K. Chen et al. [
27] for battery-free WSNs. This algorithm selects the nodes adaptively according to their energy conditions and then allocates time slots for the selected nodes to achieve the minimum latency. The structure-free general data aggregation scheduling method proposed by Q. Chen et al. [
28] involves the computation of a conflict-free schedule simultaneously, relying on non-predetermined structures. Two latency and energy-efficient algorithms were developed for both the single query and the multiple-query MLAS problem.
Y. Cai et al. applied the chaotic fireworks algorithm to solve the TSP problem [
29], where the logistic map function was utilized to generate a chaotic sequence to improve the search capability in the discrete solution space. In [
30], Luo W. et al. used two hybrid chaotic systems to generate more uniform fireworks, meanwhile, they developed a new chaotic perturbation operator to accelerate the algorithm convergence and help the algorithm jump out of the local optimum.
In general, there is no existing work on the research data aggregation scheduling method for battery-free WSNs with multi-channel modes—until now. The chaotic firework algorithm is a feasible option to realize the scheduling method in battery-free WSNs.
4. Scheduling Method Based on the Chaotic Firework Algorithm
The theory of the firework algorithm comes from the explosion phenomenon of fireworks [
34]. Each firework individual is regarded as a feasible solution in the solution space. Then the process of generating a certain number of sparks in the firework explosion is actually the process of the neighborhood search for a feasible solution. By filtering the firework and spark with poor quality in multiple iterations, the optimal solution to the set problem can be discovered quickly. The explosion radius and the number of explosion sparks of each firework are different. The firework with poor fitness value has a larger explosion radius, which makes it have global search ability. Correspondingly, the firework with a good fitness value has a small explosion radius, which makes it have local search ability. Fireworks perform resource allocation and information exchange according to their fitness values so that the entire population can achieve a balance between the global search ability and local search ability [
35]. The chaotic fireworks algorithm implants chaotic sequences into the original version, which further improves the search ability of the algorithm [
30]. The chaotic fireworks algorithm consists of five parts: firework encoding, explosion detection, Gaussian mutation, chaotic replacement, and selection strategy.
4.1. Firework Encoding
To directly encode the scheduling set, as a firework individual cannot ensure its feasibility during the process of explosion detection, Gaussian mutation, and chaotic replacement, because these evolution operations have different levels of randomness. The newly generated scheduling set has a high probability of violating the defined constraints for the MDSB problem; therefore, it is not a feasible solution. To avoid generating meaningless solutions, the priority set is applied as the encoding scheme for the firework individual.
Any link in the routing structure is assigned a priority (weight) within the range of . Then a routing structure corresponds to a priority set , which can be used as input for the function of generating a feasible solution . The generation of the scheduling set is based on the iteration of the timestep. At each timestep, the links in the ready state are possibly added to the scheduling set according to priority and communication conflicts. Assume the completed scheduling set as at timestep t, where the corresponding links in have already been allocated to the time slot and channel. Then the definition of the ready state of any link is expressed as follows:
and
The detailed procedure is described in Algorithm 1. If the scheduling task is not complete for all links in
, the generating iteration continues. In each timestep
t, the current candidate link set
and the set of links in the ready state
are initialized first. In lines 4–8, we find all links in the ready state and put them into
. After sorting
into
, the algorithm circularly detects each link
in
according to its priority. In lines 10–20, the links with communication conflicts are handled appropriately. If there is a direct communication conflict, we stop scheduling the current link and jump to the next. If there is an indirect communication conflict, and the available channel is not empty, then a new channel is allocated to the current link. In lines 21–22, the scheduling tuple is complete for
, and update
and
. Once the allocation of the current timestep is complete, then the priority set removes
and moves to the next timestep in lines 24–25. An example of the function to generate a feasible solution is depicted in
Figure 5. The priority is set among
in this case, and after generation, a feasible scheduling set
is obtained as the output of Algorithm 1.
| Algorithm 1 Function of generating a feasible solution |
- 1:
; - 2:
while do - 3:
; - 4:
for in .link do - 5:
if .state == ready then - 6:
- 7:
end if - 8:
end for - 9:
; - 10:
for in do - 11:
if then - 12:
continue; - 13:
end if - 14:
if then - 15:
if then - 16:
c++; - 17:
else - 18:
continue; - 19:
end if - 20:
end if - 21:
; - 22:
; - 23:
end for - 24:
.remove(); - 25:
t++; - 26:
end while
|
4.2. Explosion Detection
The primary task of explosion detection is to search the sparks with better quality in the vicinity of the original fireworks. Fireworks with better quality generate more sparks in a smaller range of their neighborhoods, while fireworks with poor quality produce fewer sparks in a larger range of their neighborhoods. The firework or spark quality is represented by the fitness value. Assume that the algorithm has
N initial fireworks for solving the problem. The number of explosion sparks
and the radius
of the explosion for one firework
can be calculated by the following equations:
In Equations (2) and (3),
and
, respectively, denote the default spark number and explosion radius.
is the fitness value for the firework
, meanwhile,
and
are the maximum and minimum fitness values in the current firework population.
is the machine minimum value that is used to avoid the division by zero. In order to further ensure that the spark number of high-quality fireworks is not too much, and the spark number of low-quality fireworks is not too small, the number of sparks should be controlled within the range of
, where
and
are the predefined maximum and minimum number of sparks.
When the explosion occurs, the firework
randomly selects a certain number of dimensions for the position offset, thereby generating new sparks. The position update equation for the dimension
k is expressed as follows:
where
is the priority of the
dimension of the firework
, and
denotes uniform distribution.
4.3. Gaussian Mutation
Gaussian mutation has the effect of increasing the diversity of firework populations. This mutation randomly selects a certain number of fireworks and dimensions for each firework to perform the Gaussian mutation operation. To perform a Gaussian mutation operation on a dimension
k of fireworks,
can be expressed as:
where
represents a Gaussian distribution with a mean of 1 and a variance of 1.
4.4. Chaotic Replacement
Chaos is a non-periodic phenomenon peculiar to nonlinear systems [
36]. The ergodicity and randomness of the chaotic search are beneficial to enhancing the global search ability of the firework algorithm and to jumping out of the local optimal solution in the search process [
37]. The chaos replacement is used in the application of the firework algorithm.
The main task is to firstly find the firework individuals whose fitness value is in the bottom percentage of the current firework population and to generate a candidate replacement set. Subsequently, the algorithm generates the same number of the chaotic sequences with the replacement set through chaotic ergodic search and converts the chaotic sequences into firework individuals in the solution space. A replacement occurs only if the quality of the new solution is better than any individual in the current replacement set. Finally, for the candidate set of firework individuals, , denotes the real number of individuals replaced by new chaotic sequences.
The discrete memristor-based model, compared with the original chaotic map functions, has a memory effect and stronger nonlinearity; these features can make the map function obtain a better chaotic effect and further improve the ergodicity and randomness. The discrete memristor-based Hénon map [
38] was adopted to generate a firework individual
in this research and the corresponding three-dimensional map equations are described in Equation (
7). In these equations,
is the generated chaotic number at the cumulative step
;
are the system parameters.
where
, when
changes to
. The memory of this discrete memristor is defined to the past
l states, and
l is set as 100 in this paper.
Equation (
8) ensures the generated value of this mapping function is located among the range of
. If the value ranges of the firework individual and chaotic sequence are the same, then
is directly equal to the individual
. Otherwise, the chaotic sequence should convert to the individual by the following function:
where the chaotic number
can convert to the
dimension of the priority
of a firework individual. In addition to the chaotic replacement, the chaotic sequence is exploited to initialize the firework individuals at the beginning of the scheduling method as well.
4.5. Selection Strategy
The original fireworks, explosion sparks, and Gaussian mutation jointly generate the candidate set
of the firework population, and chaotic replacement updates this set. From this set,
N firework individuals should be selected as the next generation of firework population. The individual with the current optimal fitness value is retained unconditionally, and on this basis, the remaining
firework individuals are selected according to the roulette rules. The probability that each firework in the set
k is selected is:
where
is the euclidean distance between two firework individuals. Under the action of Equation (
3), the deviation of an individual from other individuals is larger; consequently, its selection probability is higher as well. This mechanism avoids the selection probability of the group in dense locations being too large, potentially falling into a local optimum, but it does not necessarily guide the group to evolve in a good direction.
4.6. Description of Scheduling Procedure
At the beginning of scheduling, N firework individuals are initialized by a chaotic search and put into the set . When the iteration of the chaotic firework algorithm starts, the primary task is to construct the candidate firework set for the next round of evolution in lines 4–8. In this process, a firework individual converts to a feasible solution through Algorithm 1. In lines 6–7, explosion detection and Gaussian mutation are performed on , and then construct the current firework set . Chaotic exploration attempts to optimize further the individuals in by a chaotic search. The best N individuals in are selected as in line 11. Through the continuous iteration of the above steps, the solutions with better quality will be found, and finally, converge to an approximate optimal solution.
6. Simulation Results and Performance Evaluation
By testing the different application scenarios and comparing them with the existing methods, the performance of the proposed scheduling methods is comprehensively evaluated in this section. The routing structure is constructed before starting the data aggregation scheduling, and the relevant routing information becomes available for the sink node, which is responsible for computing the optimal scheduling set. OMNeT++ is used as the simulation platform, and the proposed and existing algorithms are implemented on this platform.
In the simulations, battery-free sensor nodes are randomly deployed in a 500 m × 500 m area and the sink node is located at the center of this area. To facilitate implementations, the transmission range and interference range are set as the same, and this range is located in
. The energy consumption is denoted by a percentage of the energy capacity of the sensor nodes, where
. The charging rate is set as a constant in
for simplicity. The data collection period
is set as 120 s. The proposed method is called multi-channel data aggregation scheduling based on the chaotic firework algorithm for the battery-free wireless sensor network (MDAS-CF). There is no existing data aggregation scheduling method that can be directly applied for multi-channel battery-free WSNs. Two functionally closed existing methods were modified and selected as the comparison methods. The first one is data aggregation scheduling in battery-free wireless sensor networks (DASB) in [
26]. It is a centralized computing method using the global network information. By utilizing the principle of avoiding an indirect communication conflict, DASB was improved to support the multi-channel transmission mode. Another method is distributed data aggregation scheduling in multi-channel and multi-power wireless sensor networks (DDASM) [
24], which is a distributed computing method with a multi-channel transmission mode. By modifying the energy module of the sensor node, this method can work normally under battery-free WSNs.
The average aggregation delay of the scheduling method is one of the most important metrics. This metric directly reflects how long the scheduling method will take to transmit a packet to the destination node.
Figure 6 depicts an example of the aggregation delay with different numbers of nodes, where the average charging rate is 15%. The network size becomes larger as the number of nodes increases, so the scheduling problem becomes more complex. DDASM performs the worst among the three methods; as it lacks a global perspective, each node makes scheduling decisions only based on one hop information. DASB and MSAS-CF have approximate performances because both methods treat aggregation delay as the primary optimization objective. The aggregation delay of MSAS-CF is less affected by the increased size of the network. When the number of nodes is 60, the aggregation delay of MSAS-CF is only 86% and 62% of DASB and DDASM. In
Figure 7, the influence of the average charging rate on the aggregation delay is present, and the number of nodes is 40. Generally speaking, the increase in the charging rate could help reduce the aggregation delay. However, when the charging rate is more than 15% at each time slot, this effect gradually disappears for DASB and DDASM. MDAS-CF still obtains the lowest delay. In the best case, the aggregation delay of DASB is about 1.6 times higher than the aggregation delay of MDAS-CF.
Reducing the number of occupied wireless channels was another important optimization objective of this research. In
Figure 8, an example of the occupied channels with different numbers of nodes is depicted. DASB always occupied the largest number of wireless channels when compared with other methods. If there were more nodes, more indirect communication conflicts possibly occurred, and the demand for wireless channels increased as well. This phenomenon is more obvious in DDASM. The number of occupied channels for MDAS-CF remained at the lowest level.
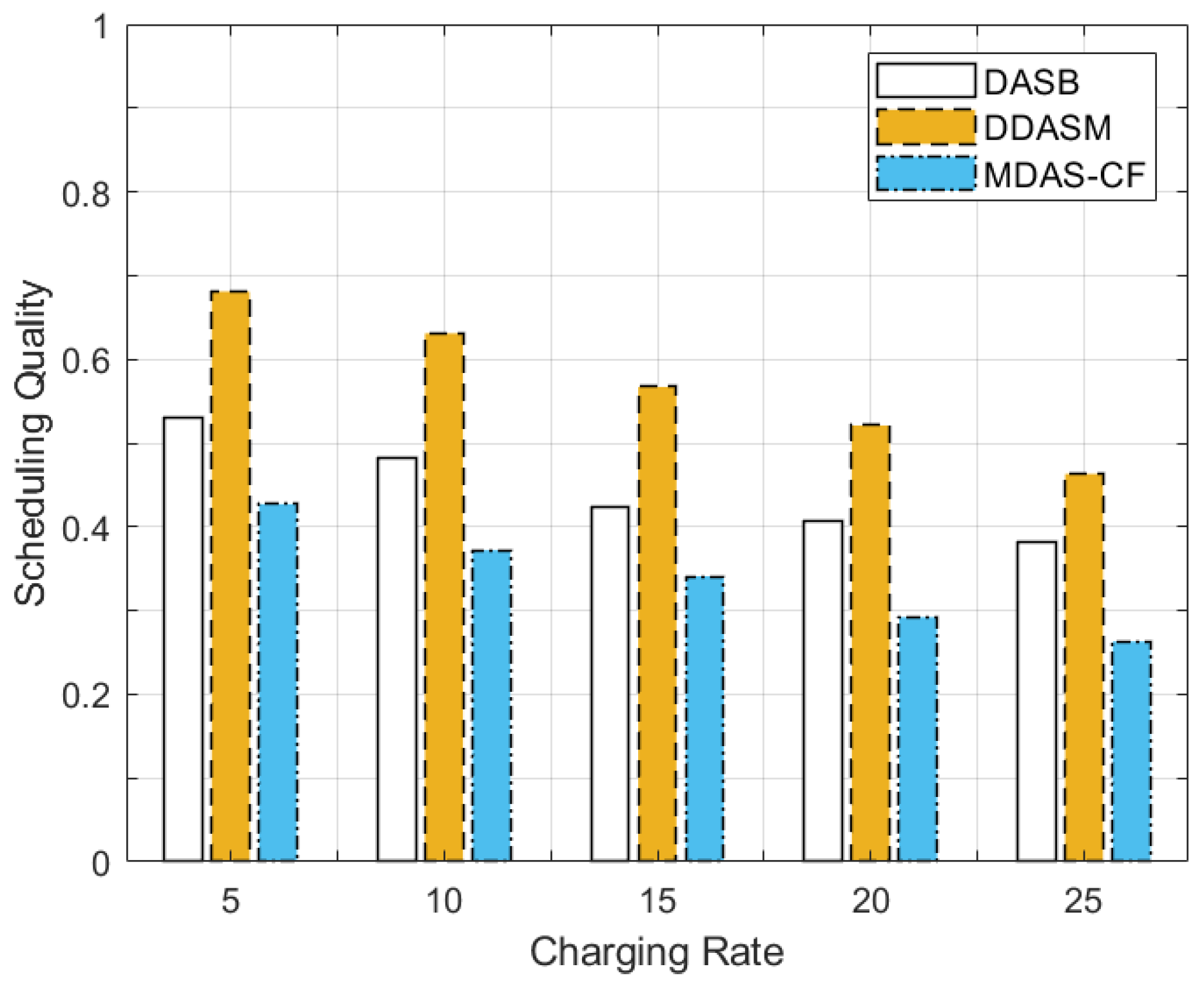
To evaluate the comprehensive performance on multiple objectives, the weighted sum with normalized objective value was adopted as the overall fitness function. The value of the weighted sum is called the scheduling quality, which denotes the quality of optimized scheduling results, and the comparison results on this metric with different charging rates are depicted in
Figure 9, where the number of nodes is 40. The lower value of fitness means better quality. When the charging rate reached 25, all scheduling methods obtained were of the best quality, and MDAS-CF was only 57% of DDASM.
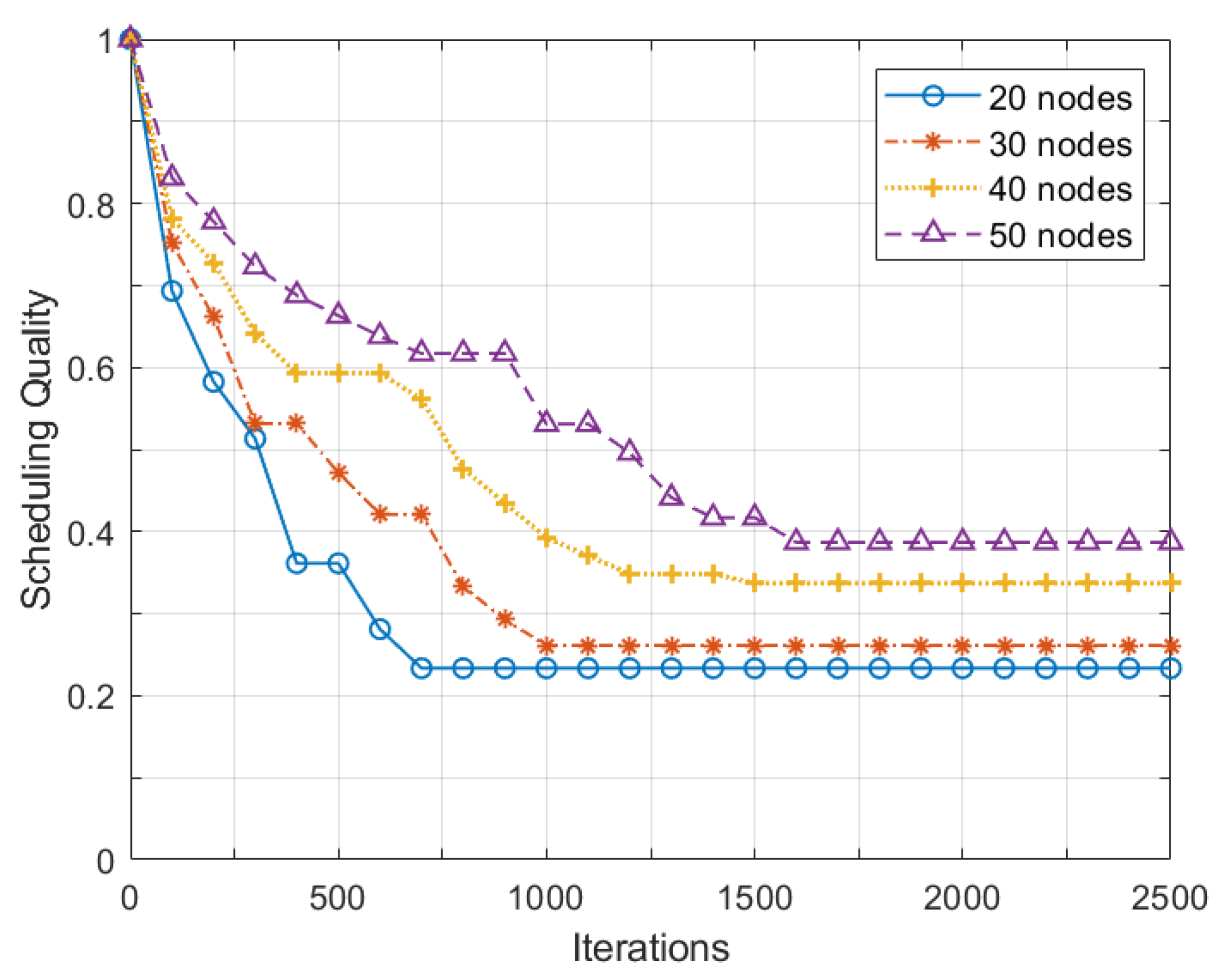
The convergence of scheduling result is an indispensable feature for the scheduling methods based on the chaotic firework algorithm. The stabilization of scheduling quality denotes the convergence state of the proposed method, and the related results can be found in
Figure 10. With more nodes in the network, the exploration of the optimal scheduling becomes more complicated, the aggregation delay may increase, and more wireless channels may be occupied. In this case, the convergence time of the scheduling method becomes longer, and the scheduling quality increases as well. When the involved nodes are 50, the method takes about 1600 iterations to reach convergence at about 0.39. Correspondingly, it just takes about 700 iterations to reach convergence at about 0.23 when there are 20 nodes in the network. Even though the exploration of the algorithm may temporarily fall into a local optimal solution during a short period of time, it will rapidly jump out to discover better solutions. For example, when there are 30 nodes in the network, the quality value remains unchanged for the iteration intervals of 400 to 600, but a better solution with a lower quality value is found after 700 iterations.
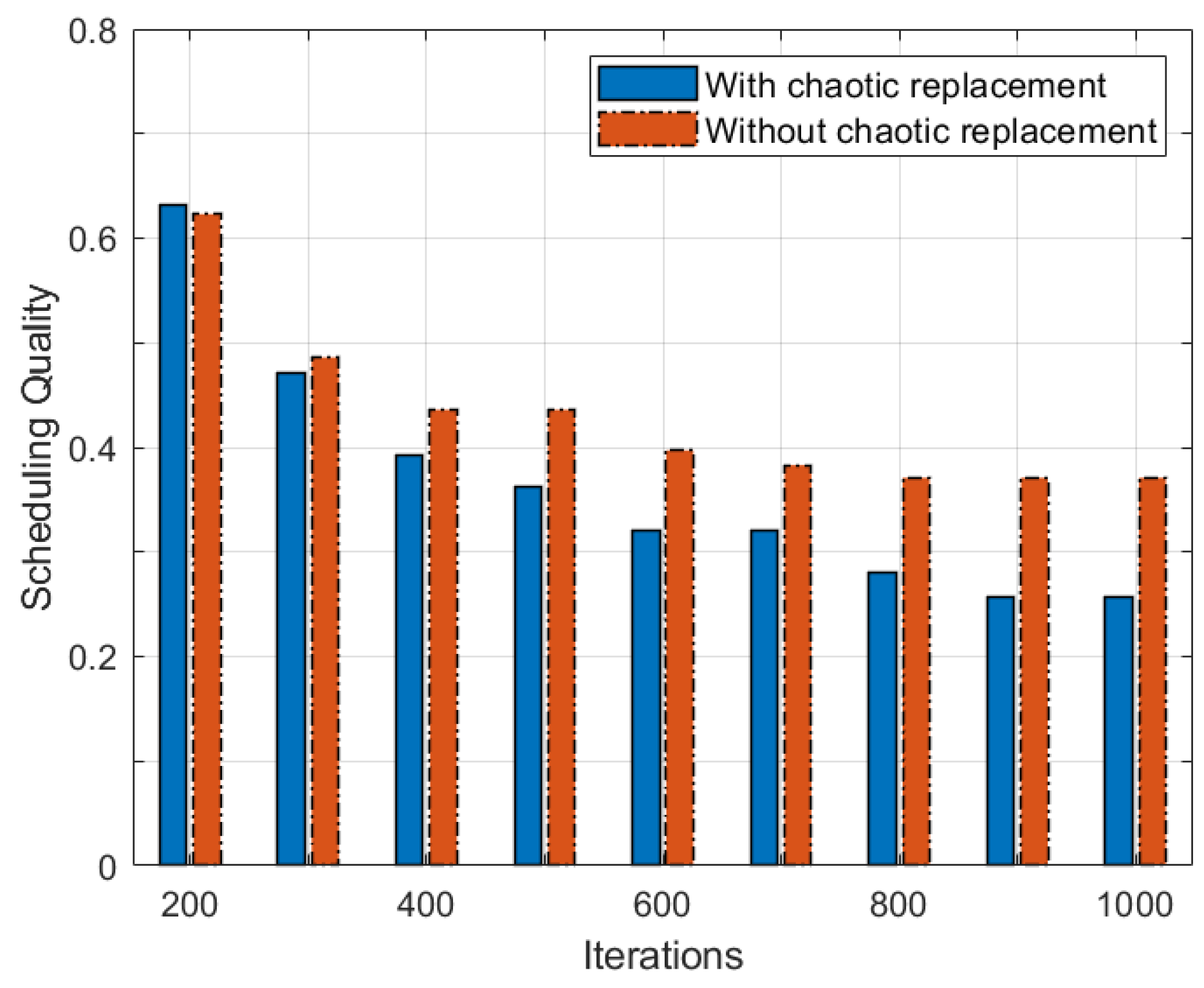
To reflect the role of the chaotic exploration, it is necessary to conduct comparative experiments to verify the improving effect; the results can be found in
Figure 11. When the iterations are less than 400, the difference in scheduling quality is not obvious (regarding whether to use chaotic exploration or not). However, the advantage of the chaotic exploration is enhanced along with the increase of the iteration. When the iteration is equal to 1000, the quality without chaotic exploration is about 1.4 times larger than the quality with chaotic exploration.
The chaotic value was generated by the chaotic map function in this research. The chaotic sequence has good ergodicity and randomness, which is beneficial for firework algorithms to get rid of the constraints of local optimal values. An example of the chaotic map function adopted in this paper is depicted in
Figure 12, where
Figure 12a presents the change of the chaotic value in the range of
with parameters
;
Figure 12b,c depicts the corresponding results of the Lyapunov exponents and frequency spectrum, respectively.
The parameter
controls the number of firework individuals potentially replaced by the chaotic sequence. In
Table 1, when
increases to 0.2, the better solution can be discovered. After 800 iterations, the solution quality of the smallest
can drop to about 63% of the solution quality of the largest
. However, the larger value of
also indicates much more computation costs, because more chaotic sequences have to be generated and converted to feasible solutions.
MDAS-CF basically obtains better performance on the main optimization objectives, as the simulation results show above. Even though the improved DASB has good performance on the aggregation delay, it takes up excessive channel resources. According to the predefined principle, DDASM distributes the construction task of the scheduling set to each sensor node. Without considering the performance of the overall network, the cooperation of nodes cannot ensure good results on the main performance metrics.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}