1. Introduction
Structures are engineered to withstand different internal forces, either acting alone or in combination [
1,
2]. This design framework also necessitates the consideration of fatigue-related and seismic issues such as crack propagation [
3,
4,
5,
6]. Structural integrity and performance are inevitably impacted by factors such as corrosion, cyclic load characteristics, and maintenance routines, leading to damage and consequent crack propagation [
7].
Crack propagation can be studied and damage tolerance analyzed using finite-element analysis and the extended finite-element method (X-FEM) [
8,
9]. The X-FEM technique uses an enrichment of the finite-element shape functions in a localized area of interest; thus, when a crack appears in the material, it allows for the incorporation of the discontinuity of the model without remeshing [
10].
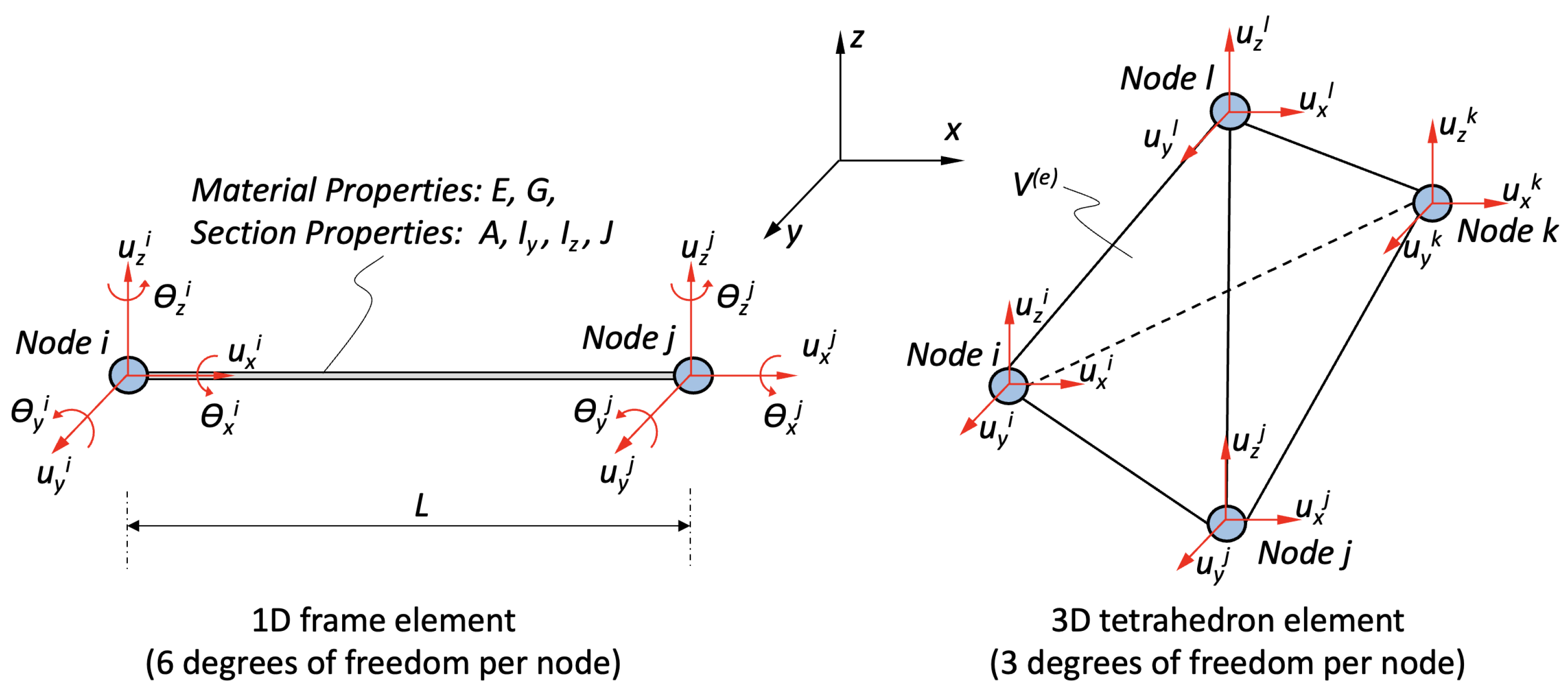
However, for large structures under static and dynamic loads, beam elements (1D elements with 6 degrees of freedom per node) are often used for the analysis [
11]. However, in their formulations, these elements cannot account for crack propagation. Therefore, the study of such behavior must adopt more complex models, such as multi-scale methods based on domain decomposition theory [
12,
13,
14,
15,
16,
17,
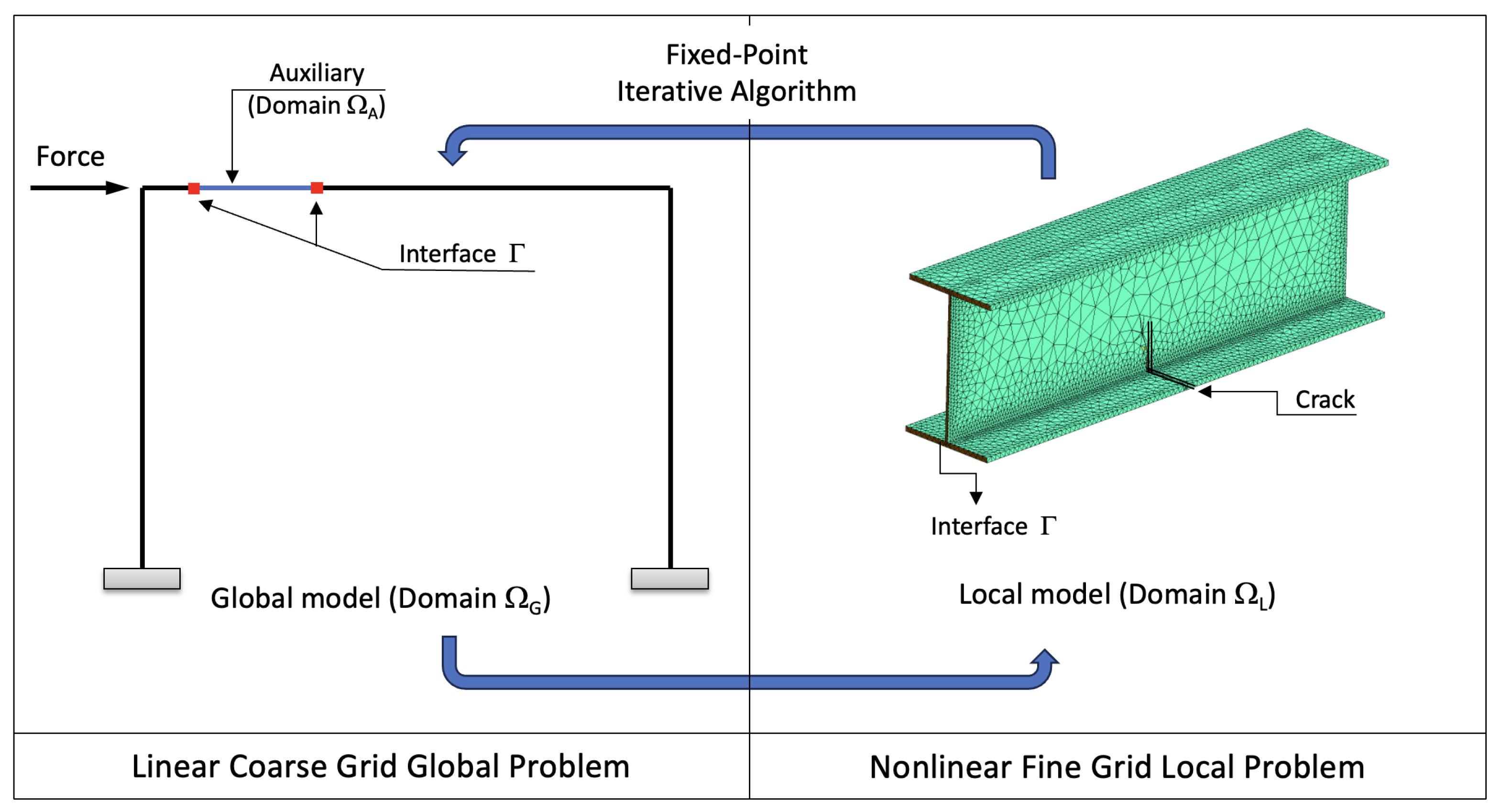
18]. New types of analysis have been studied, involving an iterative solution between local non-linear models coupled with global linear models, called global–local non-intrusive analysis [
19].
Global–local non-intrusive analysis uses previously optimized linear and non-linear solvers available in commercial software. These solutions are introduced into the linear model of the structure in the form of displacements and/or forces without the need to modify it [
18].
This analysis has been used to estimate crack propagation, non-linear hardening behavior, and non-linear contact, among other complex behaviors, with less computational time compared to a non-decomposed model (also known as a monolithic model) [
20,
21,
22,
23,
24,
25].
The global–local non-intrusive methodology has great advantages, but its convergence depends on the size of the domain of the local model. For example, global–local analysis with mesh refinement was performed in [
26,
27,
28]. A local domain size with a large number of degrees of freedom is preferable since it ensures convergence and results in a better solution; however, it would increase computational costs.
In the implementation of global–local non-intrusive analysis with 1D-to-3D coupling performed in [
25], it can be seen that the convergence depends on the length of the local model, which is determined by changing the number of iterations and their errors. Therefore, it is necessary to know the optimal dimensions to ensure the convergence of the methodology.
One way to determine the optimal size of the local model is to use machine learning (ML) techniques. ML is a class of artificial intelligence that seeks to make predictions from available datasets and algorithms [
29]. ML techniques have been used to predict the strength of structural elements, for example, the shear strength in beams [
30,
31,
32] and joints [
33,
34]. Also, they have been used to determine the axial resistance in steel [
35,
36,
37] and concrete elements [
38,
39,
40]. Other ML applications include damage detection [
41,
42,
43,
44,
45] and structural analysis and design [
46,
47,
48,
49], among others.
There are three main stages in the development of an ML model [
29]:
Prepare the database: The data used to build models are presented in the form of input variables (features) and output variables (labels, categories, or classes). In the case of structures, geometric dimensions and material properties can be classified as features, whereas resistance and deflection are used as labels. In this step, it is important to perform a classification analysis in order to identify the main features among different experiments and to group large amounts of data, considering certain variables that adequately explain certain analyzed behaviors. The features of the initial data and the performance of the learning algorithm affect the accuracy of ML models.
Learn: This step aims to train some of the existing ML algorithms using the data obtained from the previous step.
Evaluate the model: With the ML model trained, the performance is evaluated using a loss function as a performance indicator.
Some of the ML algorithms used for structural design problems and performance evaluation include linear regression, kernel regression, tree-based algorithms, logistic regression, support vector machines, k-nearest neighbors, discriminant analysis, and artificial neural networks and their variants [
50].
Linear and quadratic discriminant analysis [
51,
52] are appealing because they have closed-form solutions that are easy to compute, are inherently multiclass, and have no hyperparameters to fit, achieving good accuracy. Some applications can be found in [
53,
54,
55].
Therefore, this work applies machine learning techniques in the area of finite-element methods applied to global–local analysis and is organized as follows. The methodology section presents a summary of the global–local non-intrusive methodology, the different cases to be studied, and the mathematical formulation of the categorical discriminant analyses to be used. In the results section, the convergence of the cases is presented, as well as the results of the discriminant analysis. The validation cases using complete structures and the decision function are also introduced, i.e., a functional relationship between the length of the local model and the crack position. Finally, the discussion section summarizes the research and the results obtained, concluding with possible future studies on this topic.
3. Results
From all the cases analyzed using the global–local non-intrusive analysis, considering three propagation steps, a maximum number of iterations of 50, and a convergence tolerance of
=
, the results presented in
Table 5 were obtained.
As evident in
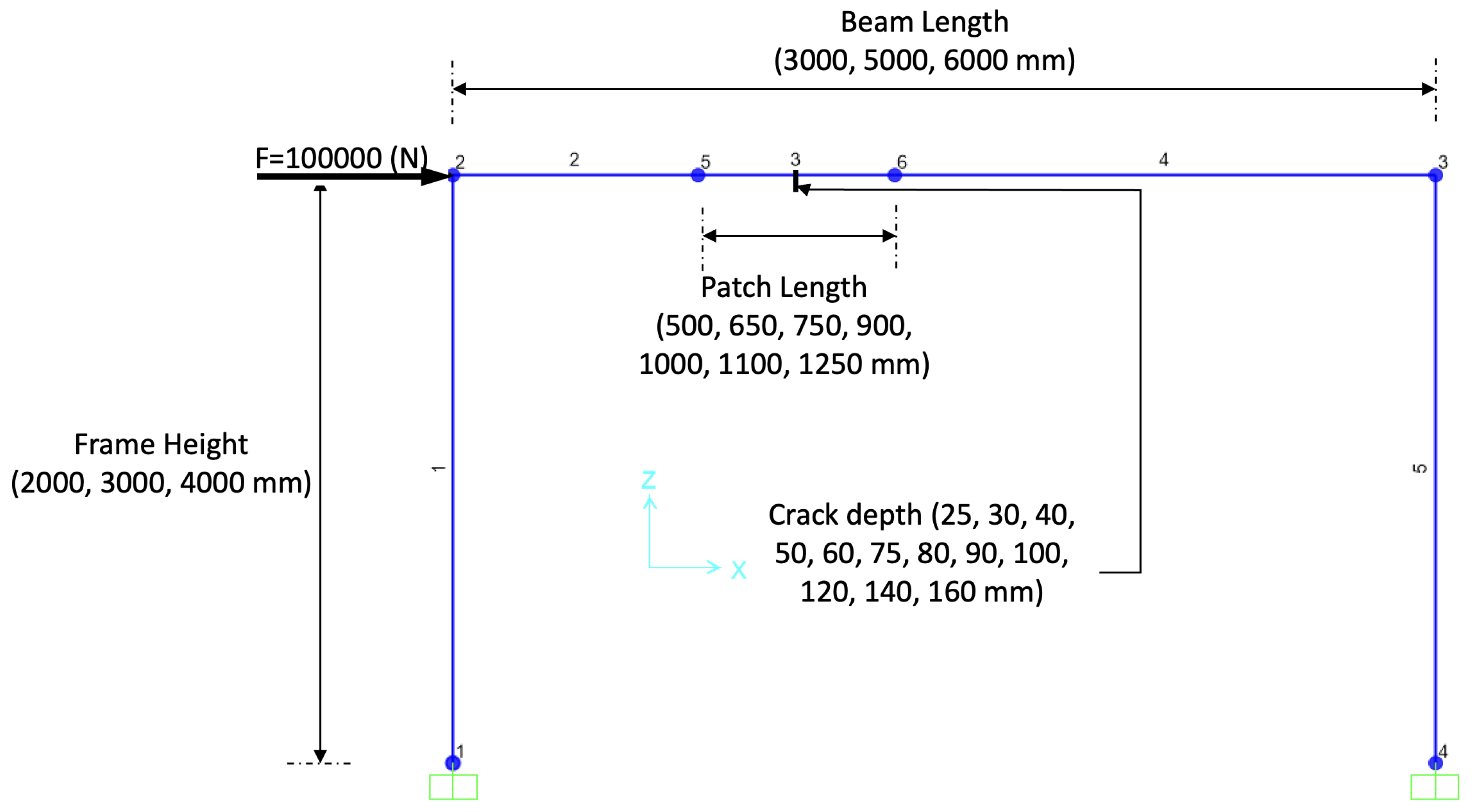
Table 5, the convergence depended on the patch length, as well as the depth of the crack with respect to the initial height of the section. In addition, two distinct features were identified:
The convergence strongly depended on the patch length. According to Saint Venant’s principle, the discontinuity (crack position) must be far from the interface to neglect the non-linear effects at the end of the local model.
The convergence status of the method was observed to depend on the length of the overall beam. This is because a very flexible patch in relation to the auxiliary model can negatively affect the convergence of the method.
Is important to mention that in accordance with the governing equations of fracture mechanics for flexure problems, the second moment of area, the area, the length of the element, and the thickness, or in this case, the area, must be considered [
67,
68]. In this case, the patch length affected the convergence of the method, as explained by Saint Venant’s principle. Another factor to consider is the relation between the length of the patch and the original beam due to the relation of the stiffness of these elements. This affected the convergence when the local model stiffness was considerably larger with respect to the global model in the non-intrusive global–local coupling. Additionally, the stress intensity factors used for crack propagation in Code_Aster depended on the geometry of the crack and the geometrical properties of the cross-section of the element being analyzed [
69].
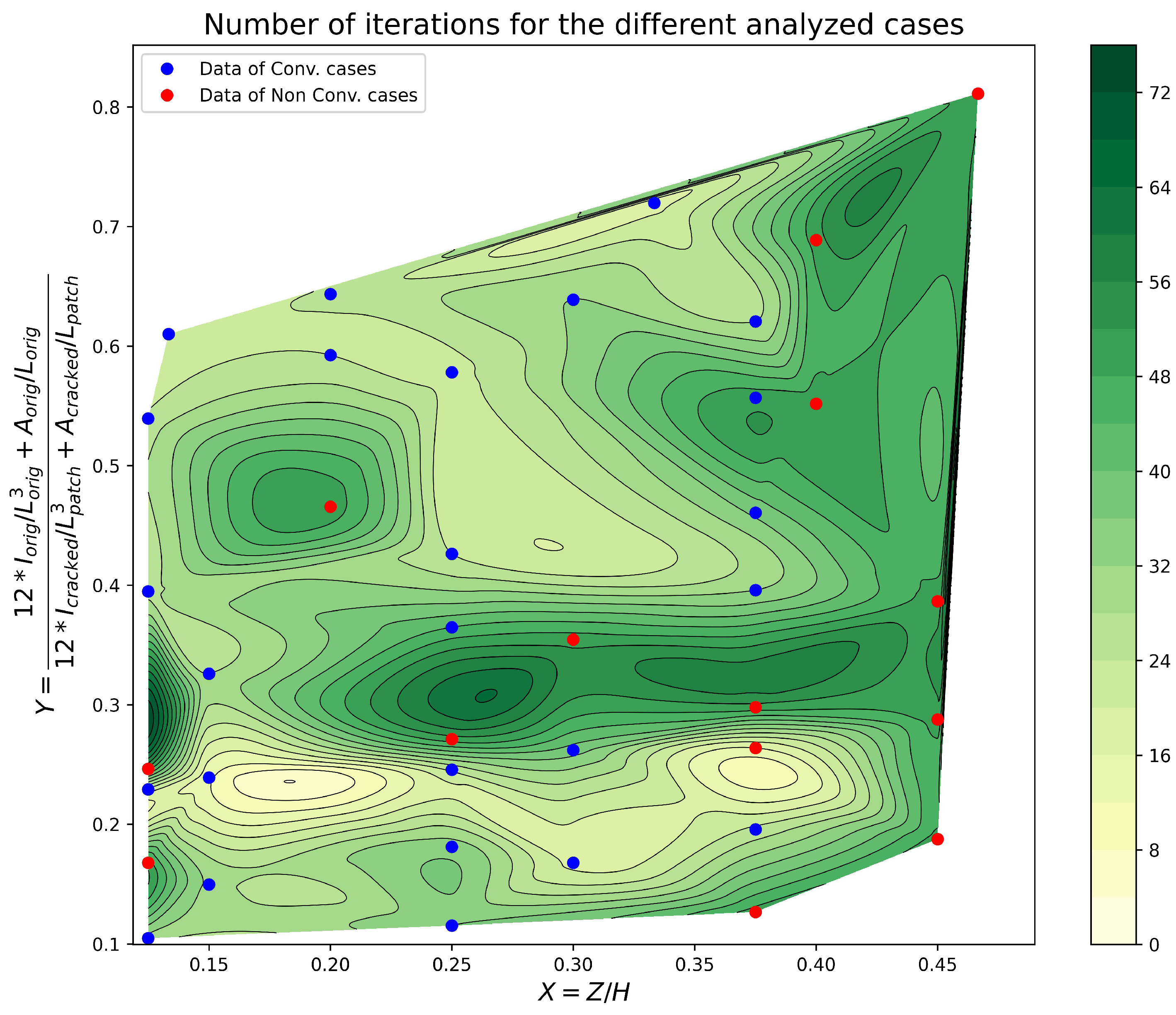
A physics-based analysis of the results indicated that the stiffness of the beam with respect to the original beam and the location of the crack with respect to the original height of the section should be considered. Hence, the variables to analyze from the different cases are presented in Equations (
11) and (
12).
where the ratio
is a dimensionless value corresponding to the percentage of the section initially cracked.
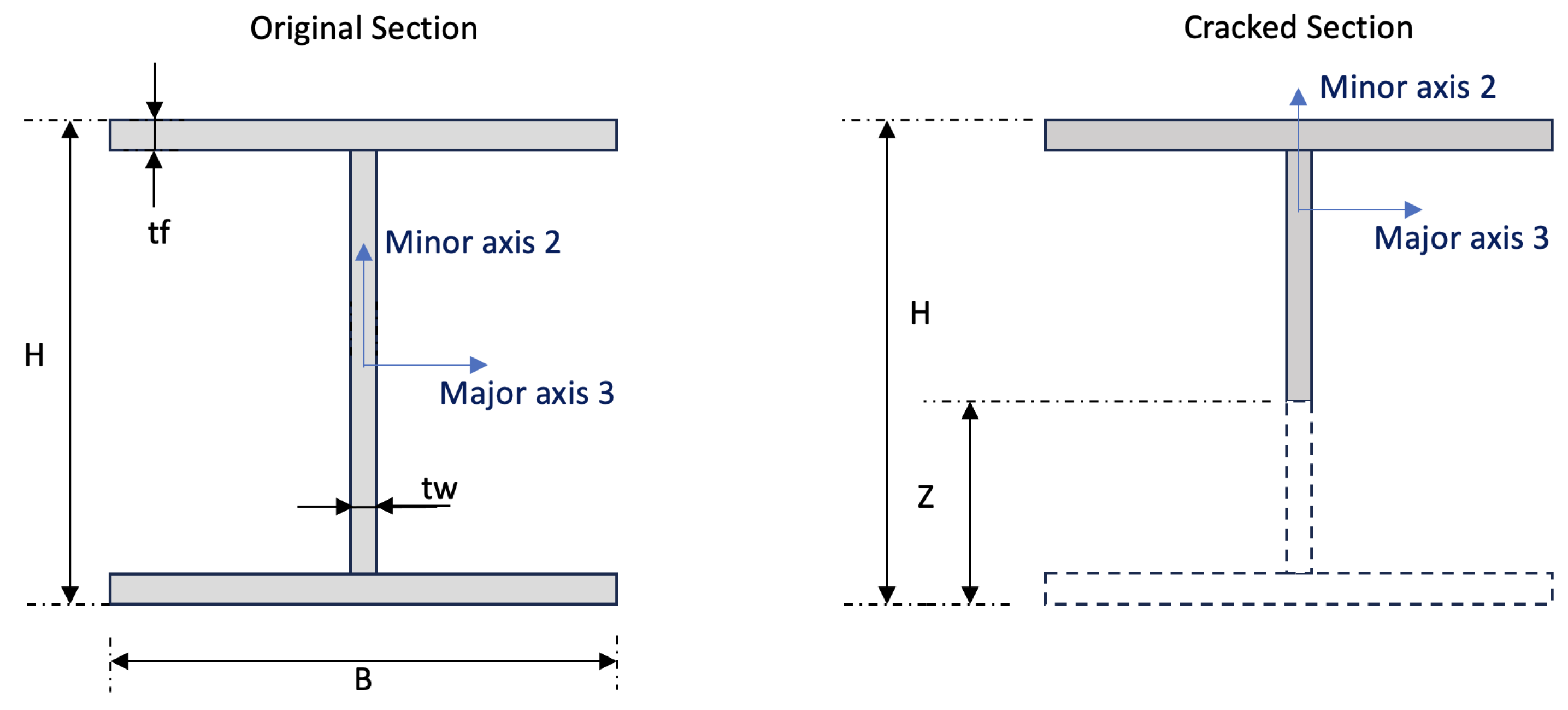
where the numerator in the equation for the dimensionless
Y value corresponds to the stiffness contribution of the original non-cracked beam, and the denominator corresponds to the stiffness contribution of the cracked patch, considering only major flexure and axial stresses (based on the original problem). The terms in Equation (
12) are the following:
is the non-cracked second-moment area of the cross-section,
is the complete beam length of the non-cracked beam,
corresponds to the cross-section area of the non-cracked section,
is the major axis second-moment area of the cracked beam,
is the cross-section area of the cracked beam, and
is the length of the patch used in the analysis.
It is important to highlight that Young’s modulus
E in the stiffness contribution in Equation (
12) was simplified between the terms of the numerator and the denominator, obtaining the mentioned equation.
The results of the iterations for both features analyzed are presented in
Figure 5.
Both discriminant analyses were performed with the analyzed features and the categorical classes, i.e., convergence or non-convergence, and considering that for these cases, no reduction and centering were performed on the data prior to the training of the different discriminant analyses.
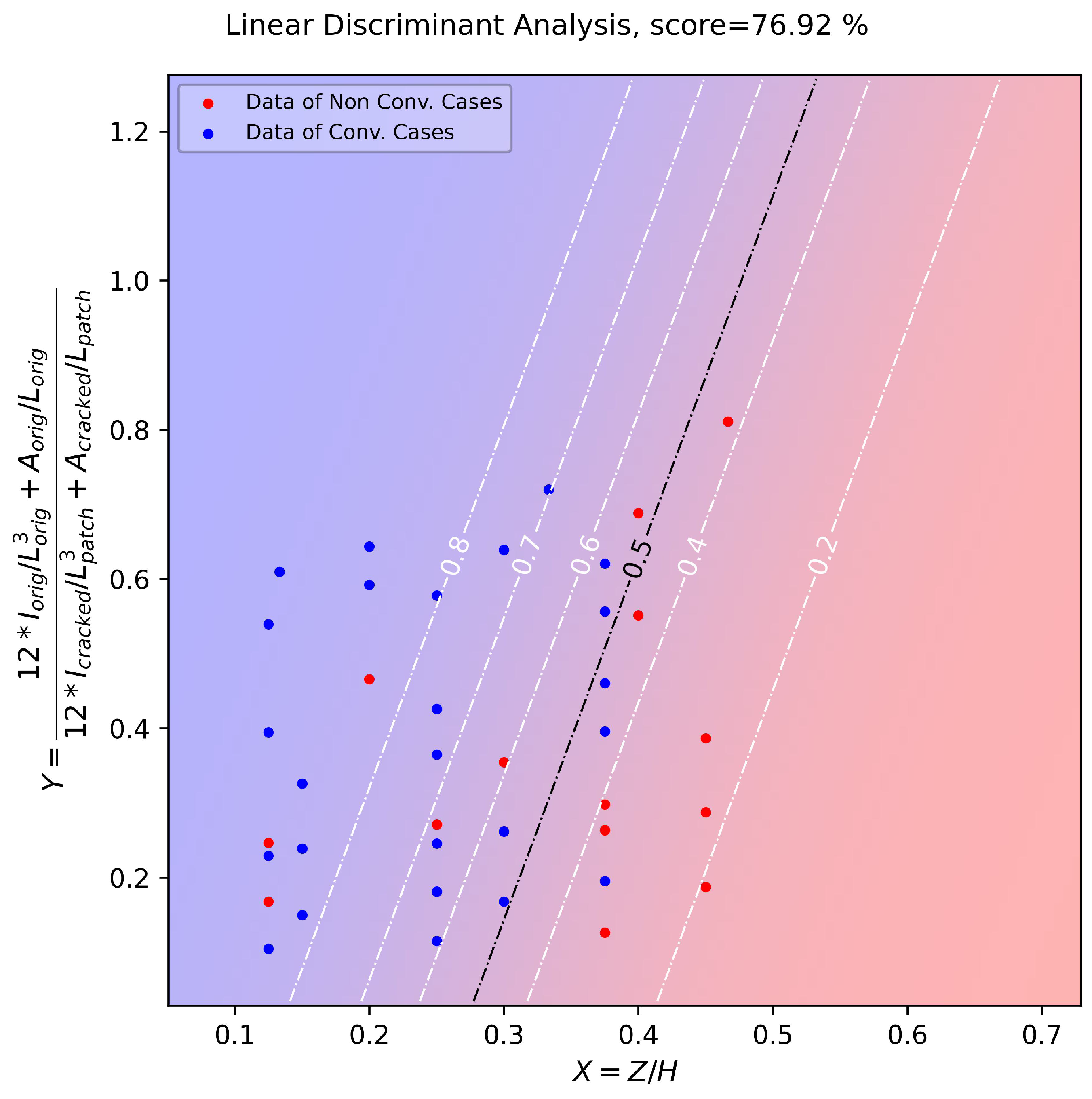
For the linear discriminant analysis presented in
Figure 6, the line indicating a 50% probability of convergence is marked in black, representing a score or accuracy of 76.92%, using the features obtained from the data analysis.
Different precision metrics or scores were considered when evaluating the results of the classification performed using linear discriminant analysis, as follows:
Micro-Score: This metric is calculated by summing the results of all the classes and calculating the metric over all the datasets. This is the score presented in
Figure 6, which is calculated as follows:
Macro-Score: This metric is calculated for each class separately to obtain a simple average of each metric. Each class contributes equally to the calculation of the macro-score, independent of its size.
Weighted Score: For this case, the size of each class is considered when calculating the weighted average of each metric. This implies that larger classes have a bigger impact on the final score.
The results are as follows:
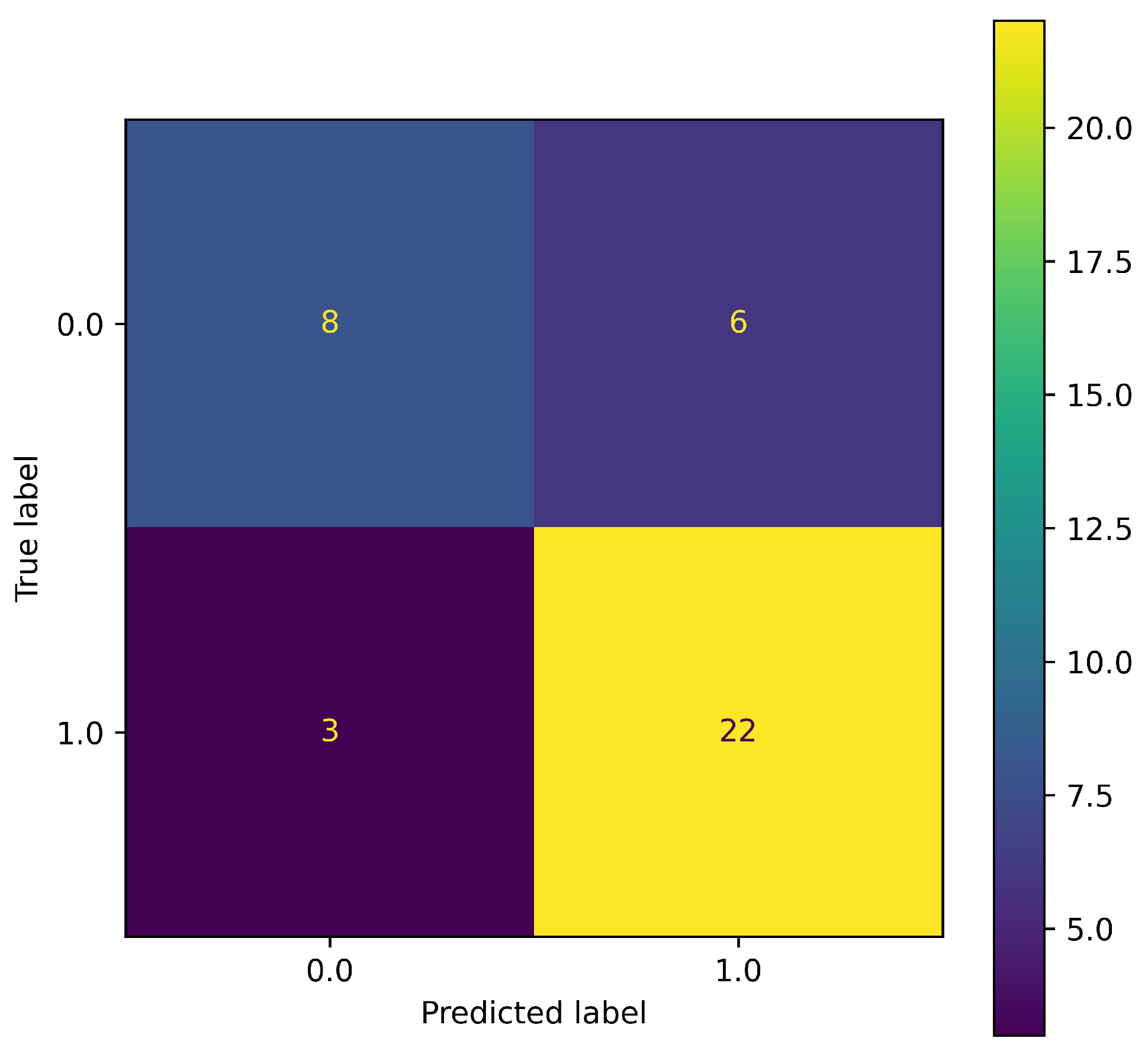
Micro-score: 0.7692
Macro-score: 0.7594
Weighted score: 0.7647
For this case, the weighted metric for the LDA model was considered more relevant due to the consideration of the size of each class when the weighted average was calculated.
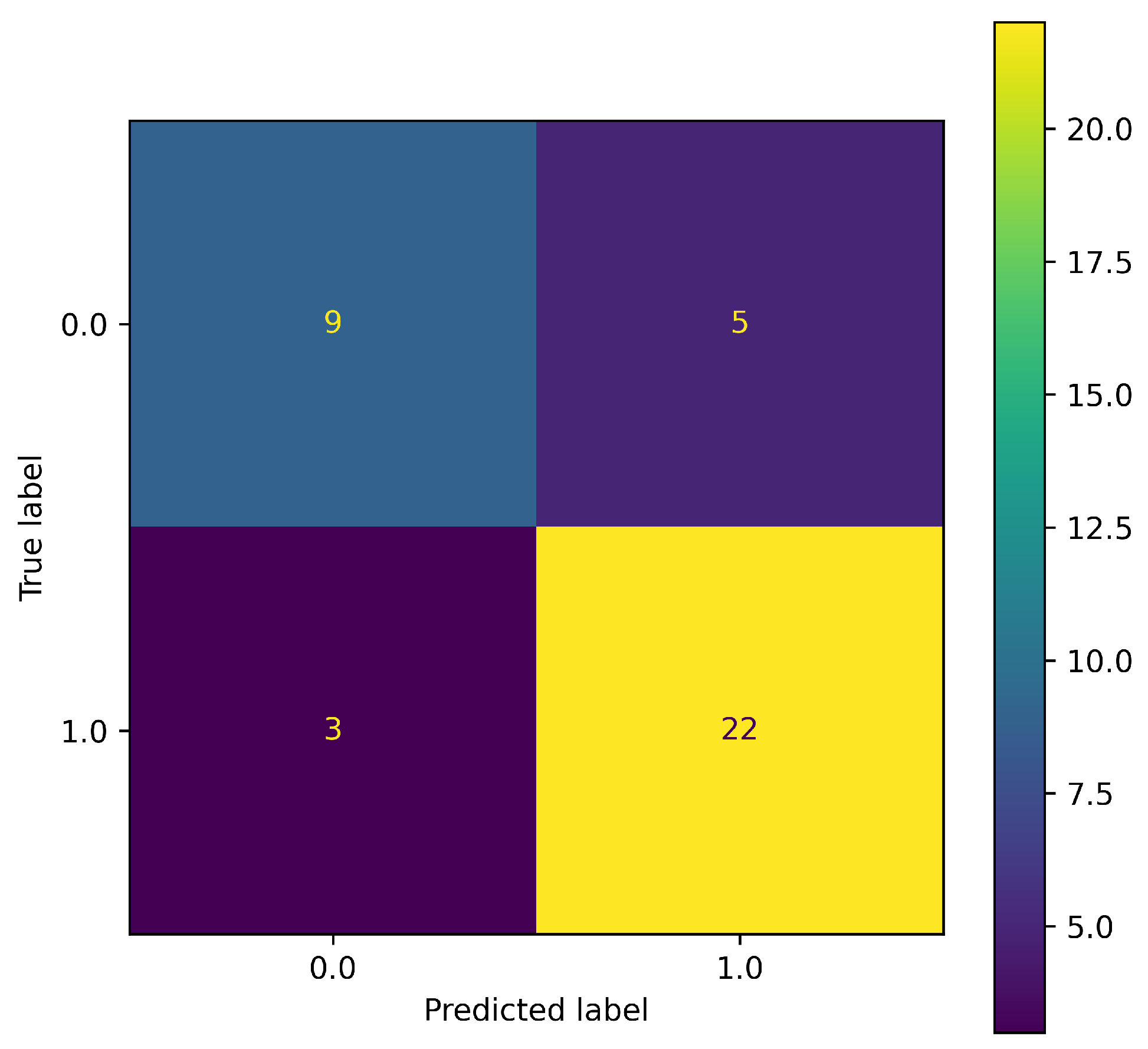
The confusion matrix of the LDA is presented in
Figure 7.
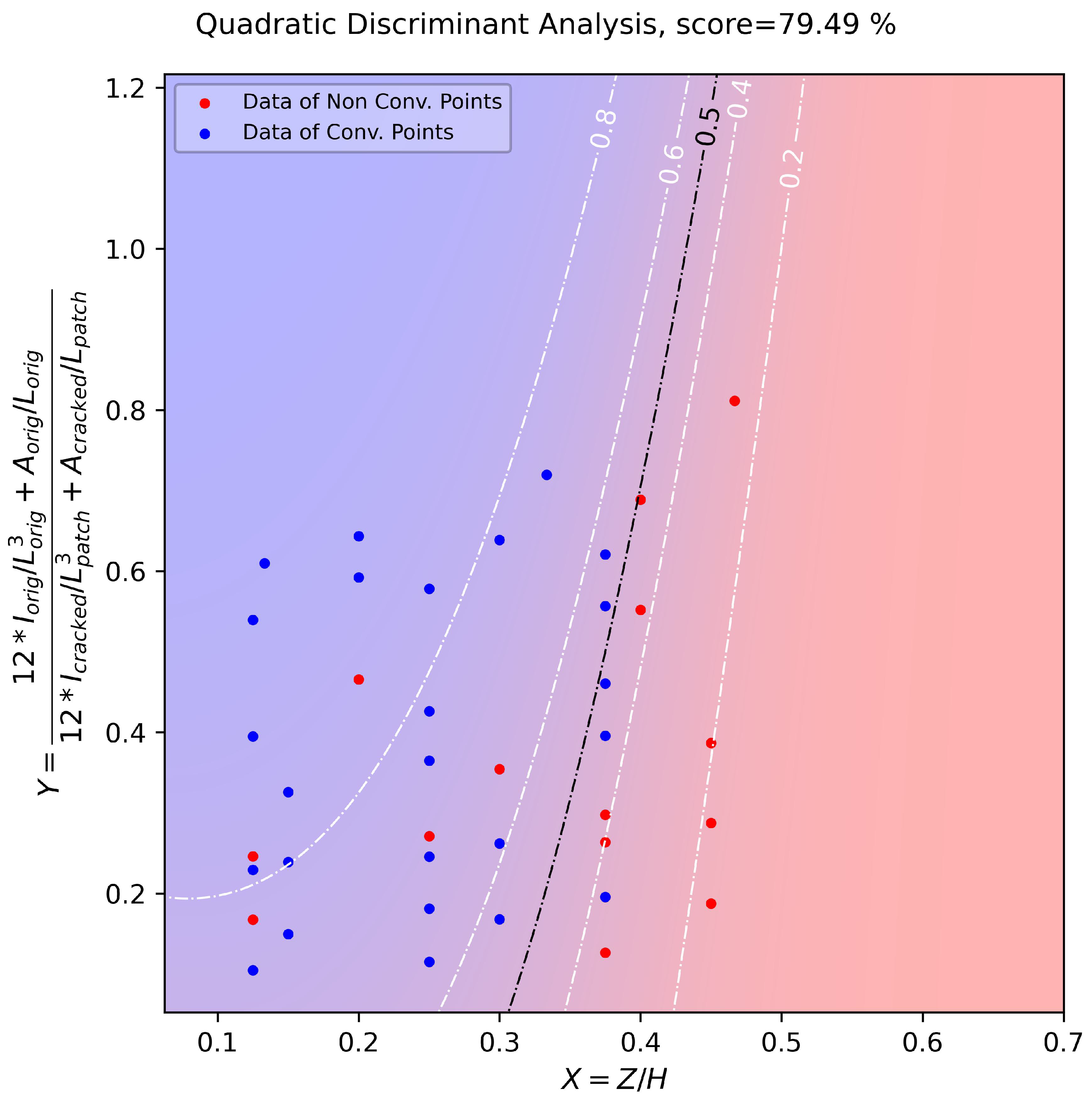
For the QDA presented in
Figure 8, the line indicating a 50% probability of convergence is marked in black, representing a score or accuracy of 79.42%, using the features obtained from the data analysis.
For QDA, the same precision metrics presented in Equations (
13)–(
17) were considered. The results obtained were as follows:
Micro-score: 0.7948
Macro-score: 0.7824
Weighted score: 0.7915
For this case, the weighted metric was considered more relevant due to the consideration of the size of each class when the weighted average was calculated. Finally, the confusion matrix of the QDA is presented in
Figure 9.
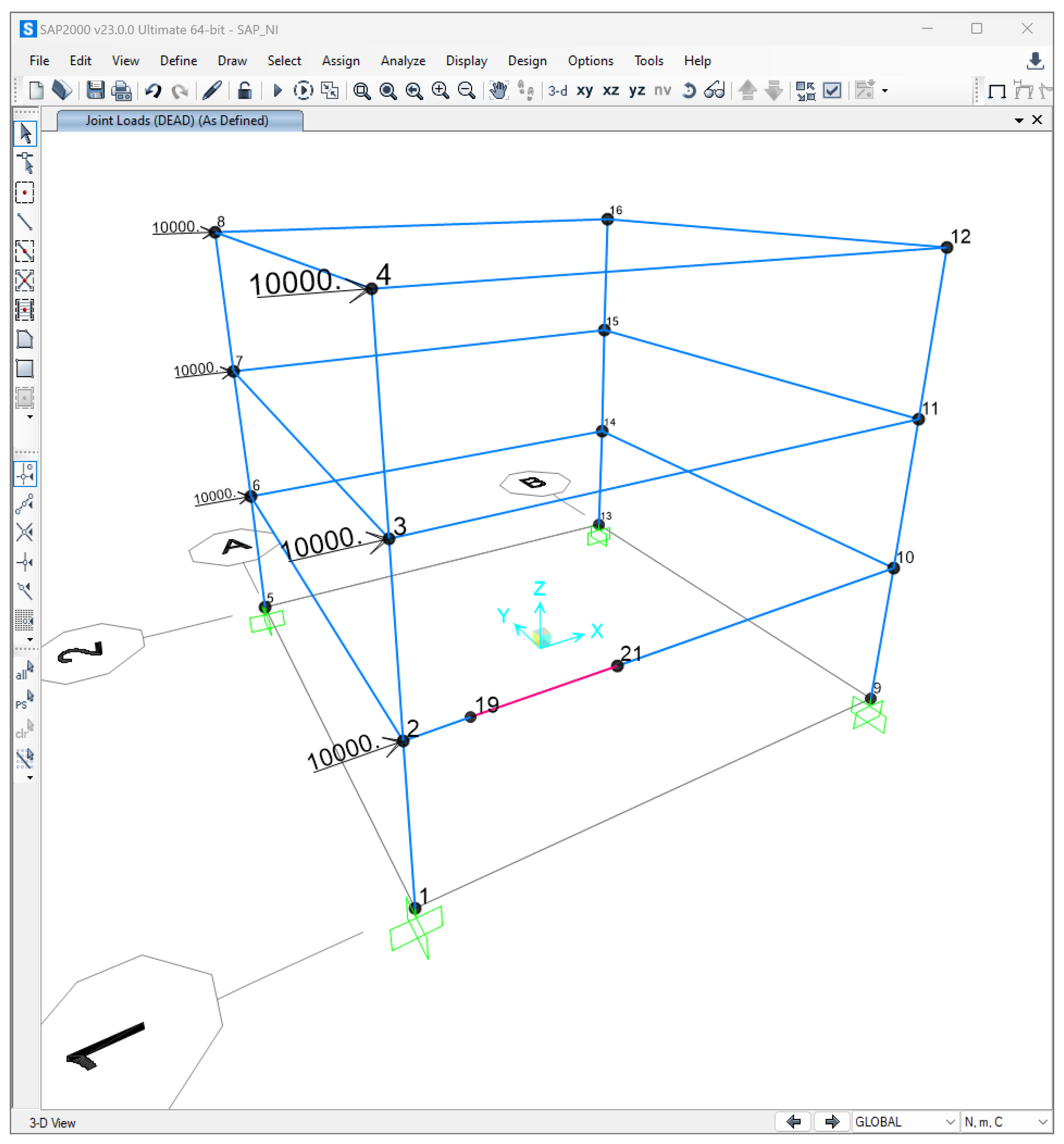
To validate the results of the discriminant analyses, the three-story building presented in [
25] with various patches was analyzed with the following properties:
A three-story steel structure with a height between floors of 3 m.
A span length of 10 m with rigid supports on the column bases.
Beam and column sections corresponding to a wide flange, with H = 300 mm, B = 200 mm, tf = 10, and tw = 6 mm.
The uncracked inertia in (mm), uncracked area in (mm), and complete beam length in (mm) were 95,109,333, 5680, and 10,000 (mm), respectively.
The cracked inertia in (mm) and cracked area in (mm) were 20,010,062 and 3440, respectively.
Four patches were analyzed with local lengths of 1000, 1500, 2000, and 2500 mm.
Each local model was analyzed with an initial crack length of 50 mm and three propagation steps.
The SAP2000 model of the software is presented in
Figure 10 and was obtained from [
25].
The different building cases used for validation are presented in
Table 6.
The building cases were incorporated into the discriminant analyses, obtaining different confidence intervals, to ensure the behavior of the global–local analysis.
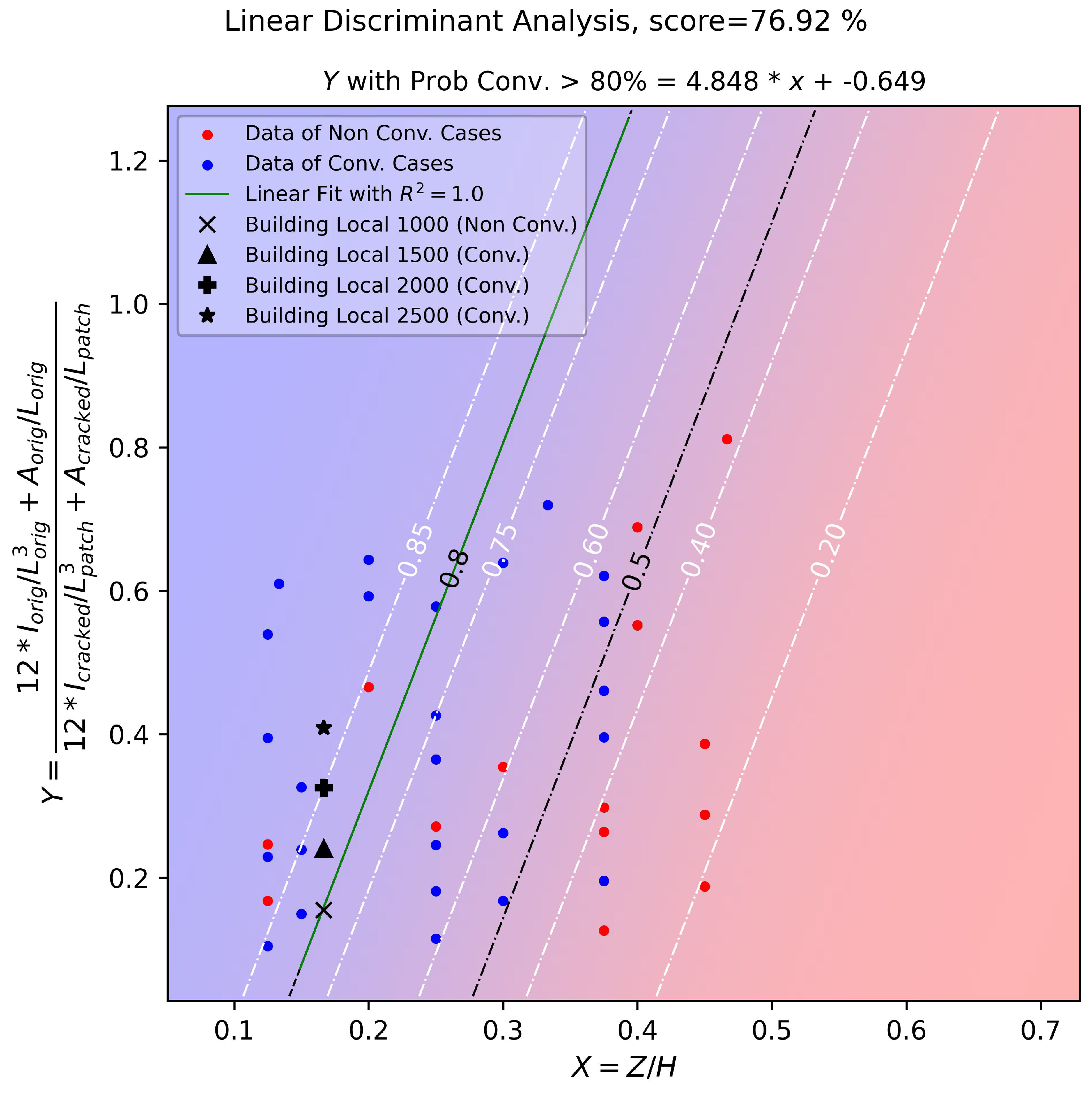
For the linear discriminant analysis, the results are presented in
Figure 11.
As presented in
Figure 11, to validate the global–local analysis of the building cases, considering a linear discriminant analysis using a contour of the probability of 80%, the convergence for the analyzed cases was achieved using the functional relation from Equation (
18) to numerically obtain the patch length:
where
X corresponds to the feature
, which relates the initial percentage of the initial crack with respect to the total height of the section. The previous equation is plotted in green in
Figure 11, resulting in a linear fit with
.
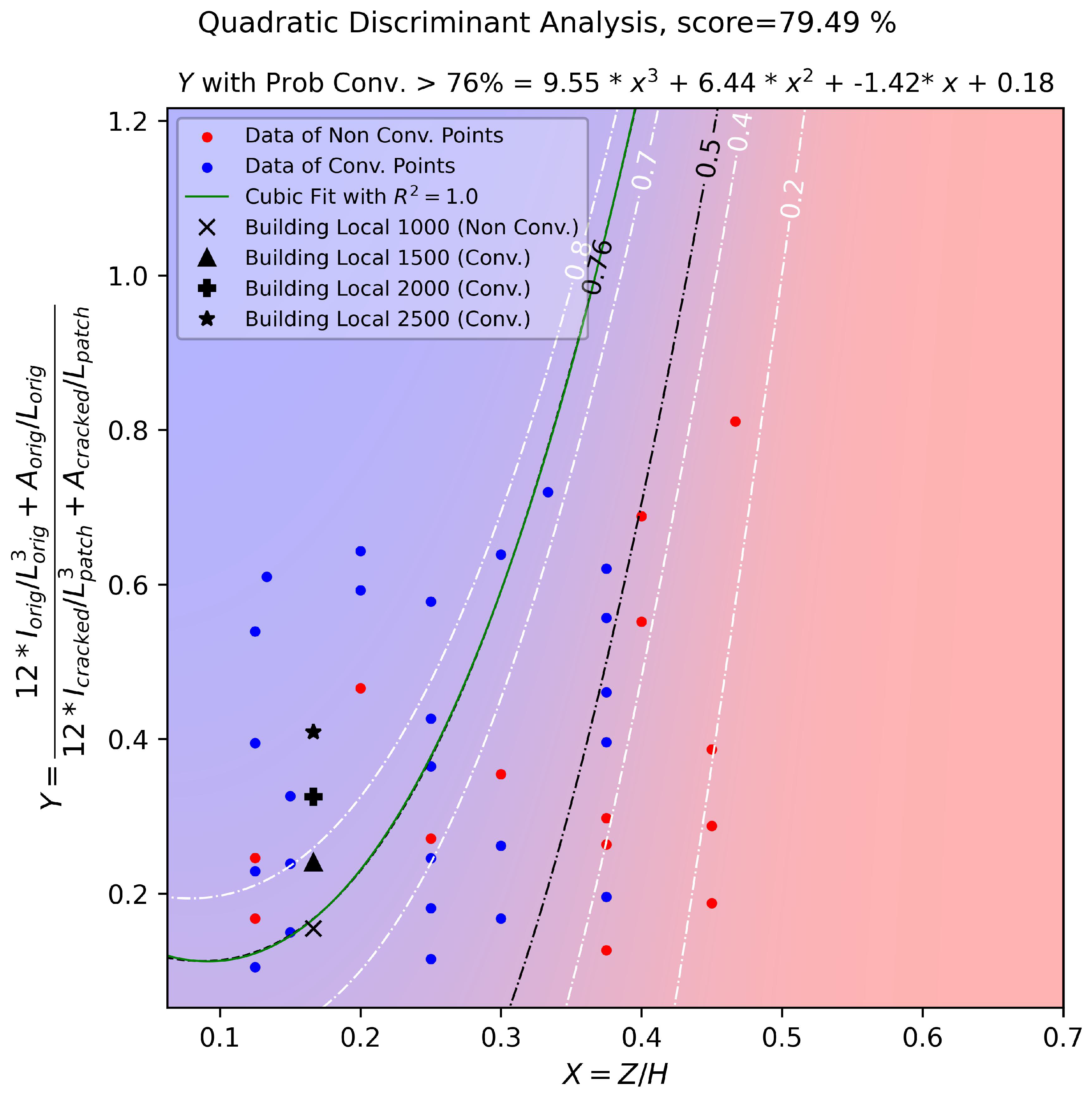
For the quadratic discriminant analysis, the results are presented in
Figure 12.
As presented in
Figure 12, to validate the quadratic discriminant analysis of the global–local non-intrusive analysis for the building cases, the convergence of the problem was achieved using a contour of the probability of 76%, obtaining the functional relation of Equation (
19), and solving for the patch length numerically:
where
X corresponds to the feature
, which relates the initial percentage of the initial crack with respect to the total height of the section. The previous equation is plotted in green in
Figure 12, resulting in a cubic polynomial fit with
.
For Equations (
18) and (
19),
is calculated using the following equation:
3.1. Convergence Analysis of the Building Cases
For the building cases, the converged cases were further analyzed in order to consider the execution times, number of iterations for convergence, number of degrees of freedom for the local patch/model, and distance from the 80% confidence line in the LDA and the 76% confidence line in the QDA, as presented in
Table 7.
From the converged cases, it was observed that all differences with respect to the probabilistic discriminant analysis calculation of the Y feature allowed obtaining a ratio of at least 1.5, ensuring the convergence of the building cases. It was also observed that the difference between the local models was negligible relative to the first convergence, i.e., a patch length of 1500 mm, and the iterations. However, for the number of degrees of freedom, there was a difference of +16% and +37% for patch lengths of 2000 and 2500 mm, respectively. Regarding the execution time, there was a difference with respect to the 1500 mm patch of +13% and +16%, and patch lengths of 2000 and 2500 mm, respectively. It can be added that from the discriminant analysis of the building cases, a patch length of 1500 mm was suggested to be used (using the functional relation and a safety factor of 1.5, obtaining a patch length of 1490 mm using the LDA Y feature from Equation (
21) and 1555 mm using the QDA Y feature from Equation (
22), respectively).
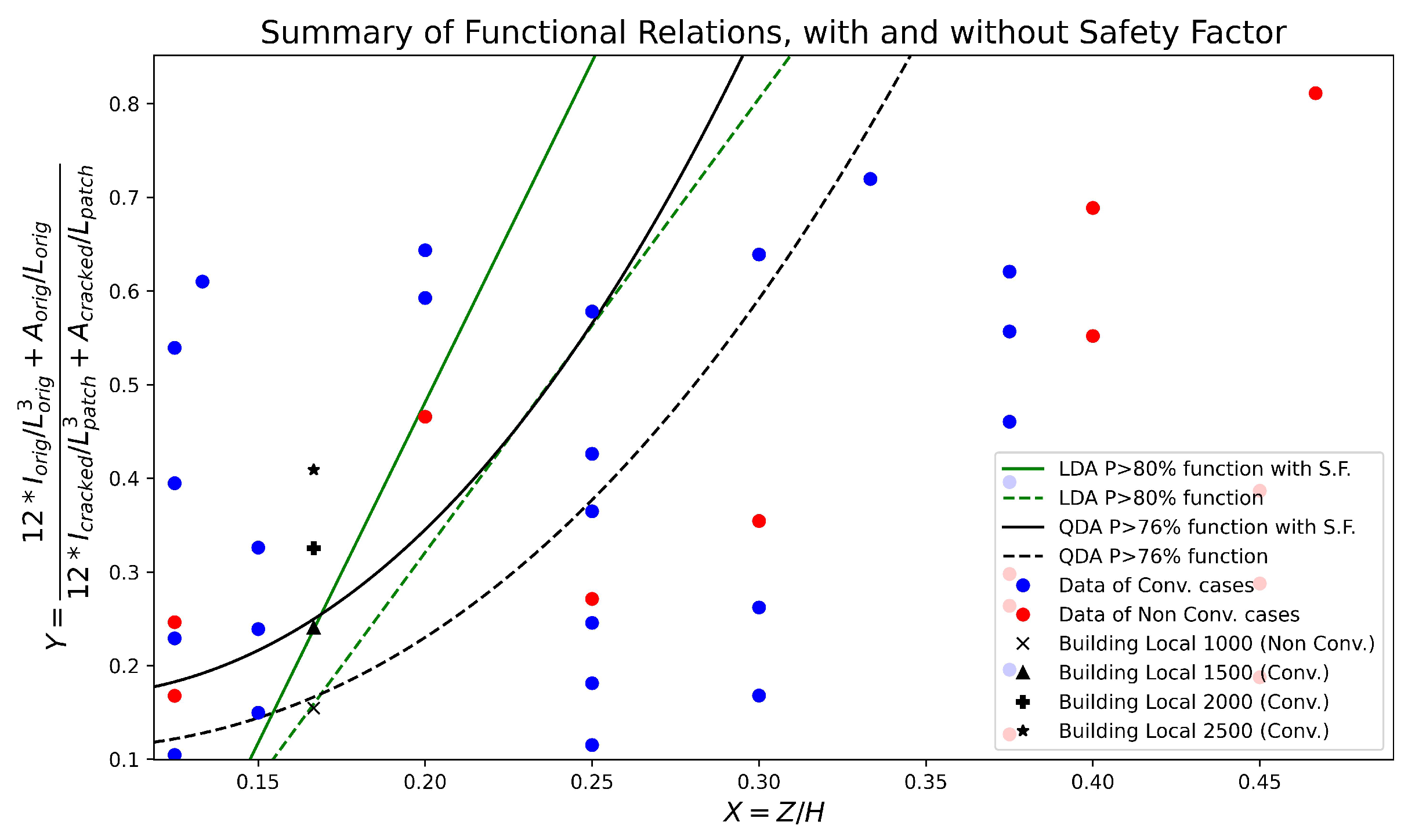
Finally, the equations, both with and without safety factors are presented in
Figure 13, summarizing the functional relations obtained in this work.
3.2. Summary of the Results
Performing linear discriminant analysis (LDA) and quadratic discriminant analysis (QDA) within the global–local non-intrusive method enables the training and generation of distinct probabilistic results. The results are presented as contours, facilitating the selection of the optimal patch length and ensuring convergence for doubly symmetric wide-flange elements. This machine learning technique serves as a starting point for solving the problem of defining the optimal patch length. The validation for both discriminant analyses was performed with a three-story building model with varying patch lengths, calculating a safety factor of 1.5 to ensure crack propagation within the local model while minimizing computational resources in the non-intrusive methodology. The presented decision variables take into account the difference in stiffness between the local and global models in the area of interest in order to determine the optimal patch length.
4. Discussion
Global–local non-intrusive analysis with 1D-to-3D coupling is a technique that allows us to more efficiently analyze localized discontinuities; however, the length of the local non-linear patch is unknown a priori. Therefore, discriminant analysis was performed using 39 one-bay one-story moment-resisting frames with lateral loads, three propagation steps, and different lengths of the local models or patches.
The categorical analysis was performed using linear and quadratic discriminants, resulting in an accuracy or score greater than 75% in both cases. Nevertheless, the quadratic discriminant analysis performed better, achieving an accuracy of 79%.
Out of the four building cases analyzed, three of them achieved convergence. A 75% confidence contour was considered for QDA, and an 80% confidence level was used for LDA, resulting in a good correlation with the different building models.
From the analysis, a safety factor of 1.5 was recommended to achieve convergence, avoiding excessive degrees of freedom in the local model, i.e., the length of the model was directly related to the number of d.o.f. of the model. This safety factor must be multiplied in the Y feature obtained from the analysis to ensure the expected behavior of the global–local analysis.
The execution time was also taken into account to consider the overall increase in time when larger patches were used relative to the suggested patch with a safety factor of 1.5. The execution time was observed to be 37% greater for the larger local patch compared to the recommended patch from the analysis.
Finally, from the linear and discriminant analyses, a functional relationship between the crack location and the overall height of the section was obtained, allowing for the extrapolation of the ratio between the axial and flexure stiffness of the patch and beam. This allowed us to easily obtain the length of the patch for the local model, ensuring the convergence of the model with a confidence level of 75% or greater.
In future research, more complex machine learning techniques could be used, such as neural networks, support vector machines, and feature selection, among others. More cases are also needed to apply these types of methods, including varying the crack positions, lengths of patches, and types of sections (channels, angles, tubulars, etc.) to be considered in these future analyses.

 ,
, 













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}