
Modelling Symmetric Ion-Acoustic Wave Structures for the BBMPB Equation in Fluid Ions Using Hirota’s Bilinear Technique
 ,
,  ,
,  and
and 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
Discussion of the Model and Wave Structures
2. Glimpse of the Method
3. Finding the Solutions of the Wave Structures
- 1.
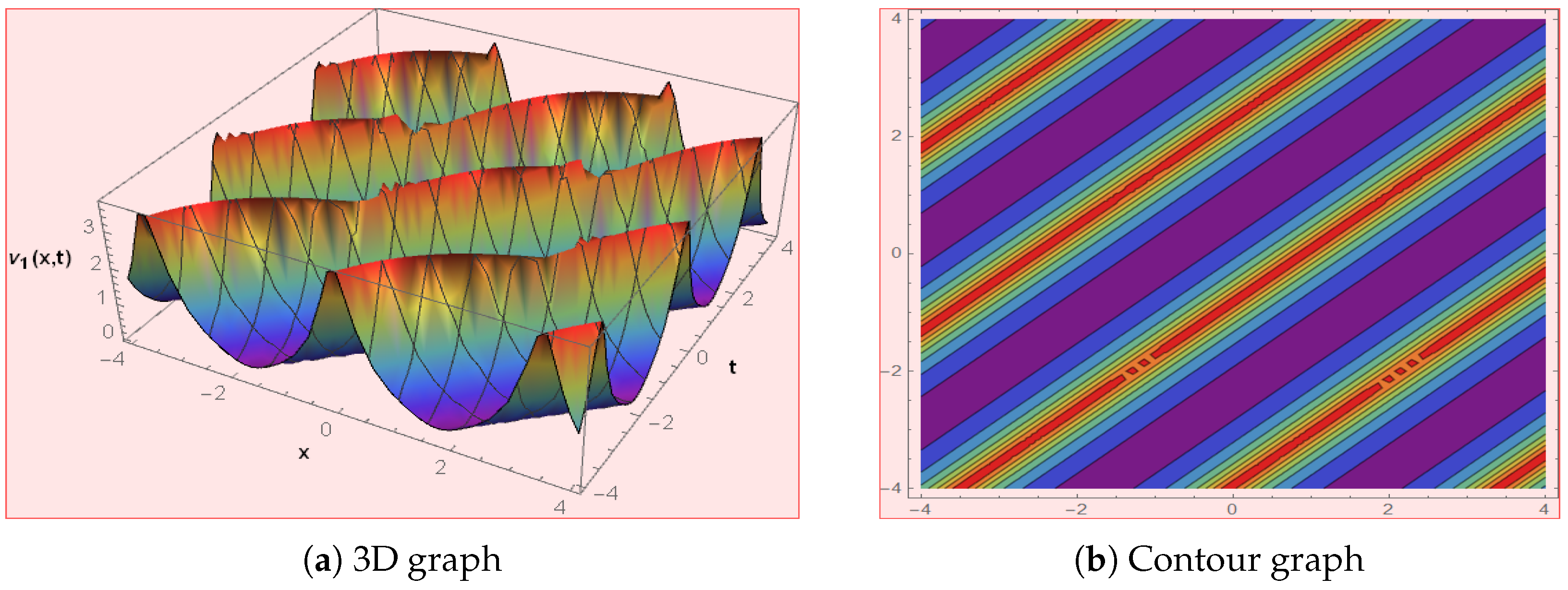
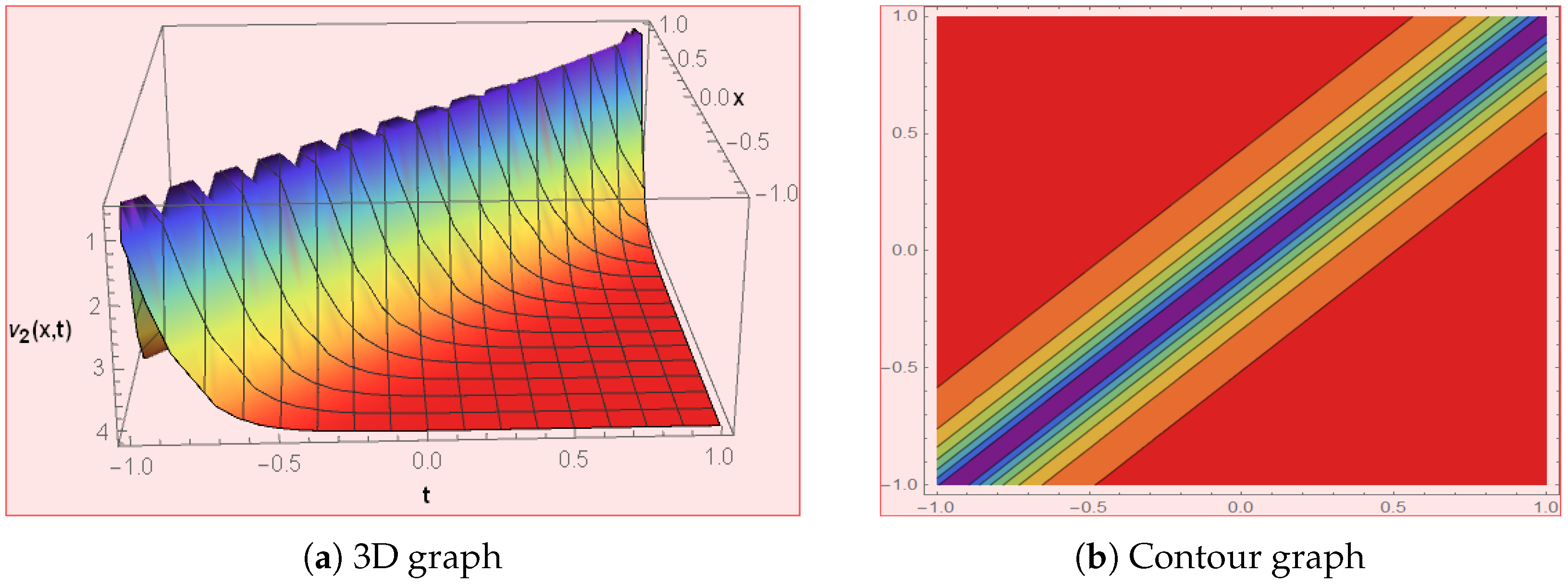
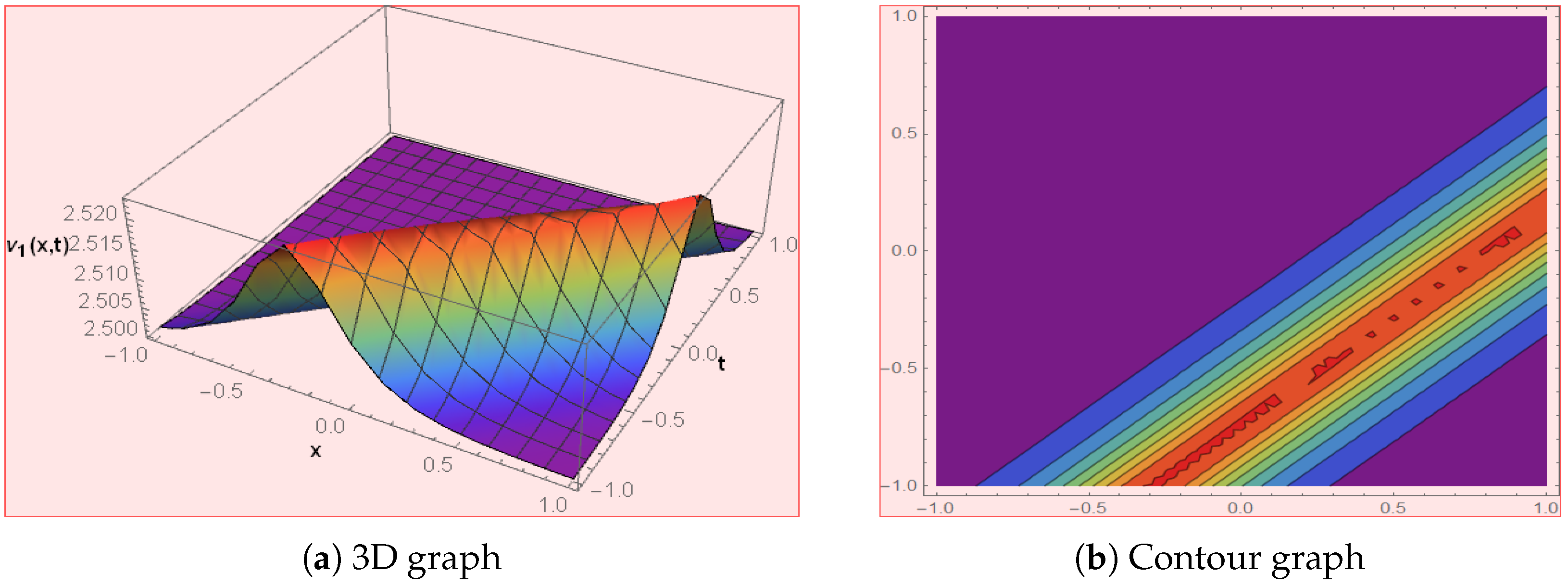
- Multiwave solutions: With the help of the following transformation [1], we are able to use the three wave hypothesis to generate different types of solutions:Substituting Equation (8) in Equation (7), simplifying and collecting similar terms with trigonometric and hyperbolic functions, and equating the coefficients of each obtained expression to zero, we obtained a system of equations and simplified it with the help of Mathematica to gain the following different sets of unknown constants:The multiwave solution of Equation (1) is extracted asThe multiwave solution of Equation (1) is extracted as
- 2.
- Interaction via double exponential form: With the help of the following transformation [1], we generate different types of solutions:Substituting Equation (13) in Equation (5), simplifying and collecting similar terms with exponential functions, and equating the coefficients of each obtained expression to zero, we obtained a system of equations and simplified it with the help of Mathematica to gain the following different sets of unknown constants:Thus, the solution of Equation (1) is extracted asThus, the solution of Equation (1) is extracted asThus, the solution of Equation (1) is extracted as
- 3.
- Homoclinic breather approach: With the help of the following transformation [1], we generate different types of solutions:Substituting Equation (20) in Equation (7), simplifying and collecting similar terms with exponential, trigonometric, and exponential–trigonometric functions, and equating the coefficients of each obtained expression to zero, we obtained a system of equations and simplified it with the help of Mathematica to gain the following different sets of unknown constants:Thus, the homoclinic breather solution of Equation (1) is extracted asSet 2: Setting and putting them in Equation (20) and then in Equation (5), we obtainwhere . Thus, the homoclinic breather solution of Equation (1) is extracted aswhere .Thus, the homoclinic breather solution of Equation (1) is extracted as
- 4.
- Mixed-type solutions: With the help of the following transformation [1], we generate different types of solutions:Substituting in Equation (27) and then in Equation (7), simplifying and collecting similar terms with exponential, trigonometric, and exponential–trigonometric functions, and equating the coefficients of each obtained expression to zero, we obtained a system of equations and simplified it with the help of Mathematica to gain the following different sets of unknown constants:The mixed-type solution of Equation (1) is extracted aswhere .The mixed-type solution of Equation (1) is extracted as
- 5.
- Periodic cross kink: With the help of the following transformation [1], we generate different types of solutions:Substituting Equation (32) in Equation (7), simplifying and collecting similar terms with exponential, trigonometric, and exponential–trigonometric functions, and equating the coefficients of each obtained expression to zero, we obtained a system of equations and simplified it with the help of Mathematica to gain the following different sets of unknown constants:Thus, the periodic cross-kink solution of Equation (1) is extracted aswhere .The periodic cross-kink solution of Equation (1) is extracted asThus, the periodic cross-kink solution of Equation (5) is extracted as
- 6.
- Cross-kink rational wave solution: With the help of the following transformation [31], we generate different types of solutions:Substituting Equation (39) in Equation (7), simplifying and collecting similar terms with exponential functions and equating the coefficients of each obtained expression to zero, we obtained a system of equations and simplified it with the help of Mathematica to gain the following different sets of unknown constants:Thus, the cross-kink rational wave solution of Equation (1) is extracted asThus, the cross-kink rational wave solution of Equation (1) is extracted asThus, the cross-kink rational wave solution of Equation (1) is extracted as
- 7.
- M-shaped rational wave solution: With the help of the following transformation [31], we generate different types of solutions:Substituting Equation (46) in Equation (7), simplifying and collecting similar terms, and equating the coefficients of each obtained expression to zero, we obtained a system of equations and simplified it with the help of Mathematica to gain the following different sets of unknown constants:Thus, the M-shaped rational wave solution of Equation (1) is extracted aswhere .Thus, the M-shaped rational wave solution of Equation (1) is extracted asThus, the M-shaped rational wave solution of Equation (1) is extracted as
- 8.
- M-shaped rational wave solution with one kink wave: With the help of the following transformation [31], we generate different types of solutions:Substituting Equation (53) in Equation (7), simplifying and collecting similar terms with exponential functions, and equating the coefficients of each obtained expression to zero, we obtained a system of equations and simplified it with the help of Mathematica to gain the following different sets of unknown constants:Thus, the solution of Equation (1) is extracted asThus, the solution of Equation (1) is extracted asThus, the solution of Equation (1) is extracted as
- 9.
- M-shaped rational wave solution with two kink waves: With the help of the following transformation [31], we generate different types of solutions:Substituting Equation (60) in Equation (7), simplifying and collecting similar terms with exponential functions, and equating the coefficients of each obtained expression to zero, we obtained a system of equations and simplified it with the help of Mathematica to gain the following different sets of unknown constants:Thus, the solution of Equation (1) is extracted asThus, the solution of Equation (1) is extracted aswhere .Thus, the solution of Equation (1) is extracted as
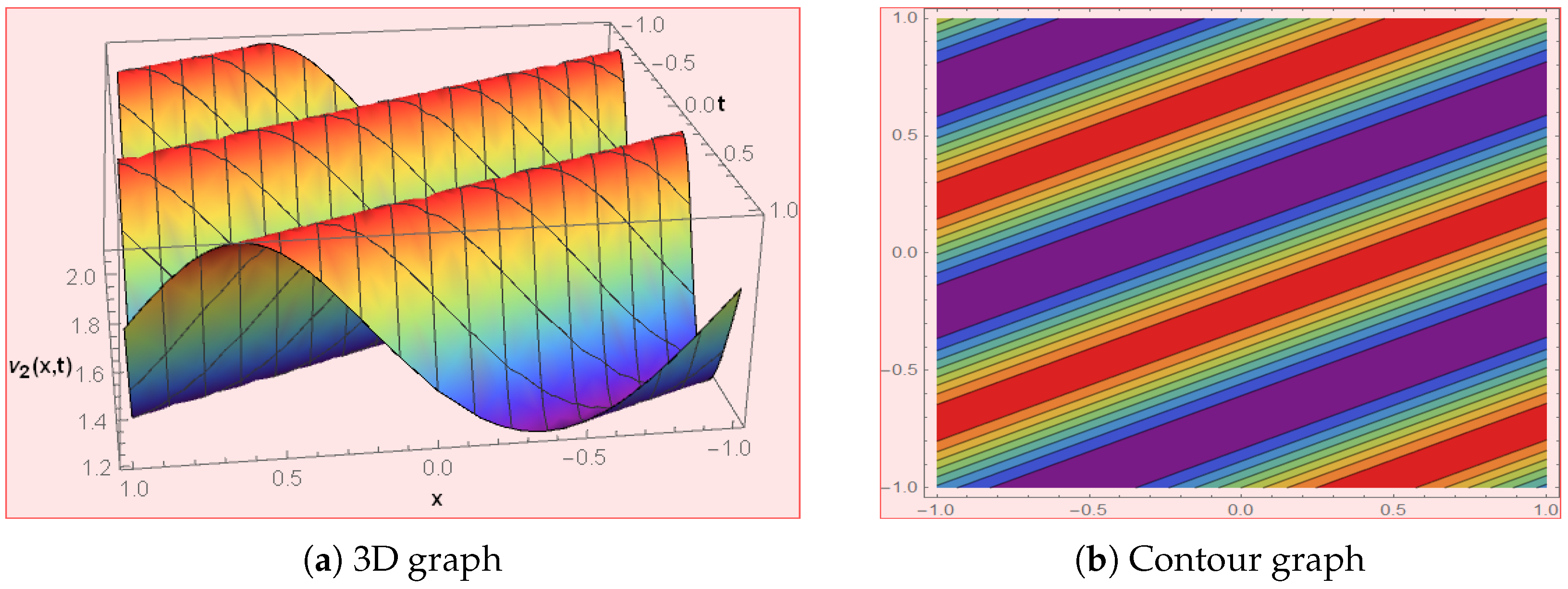
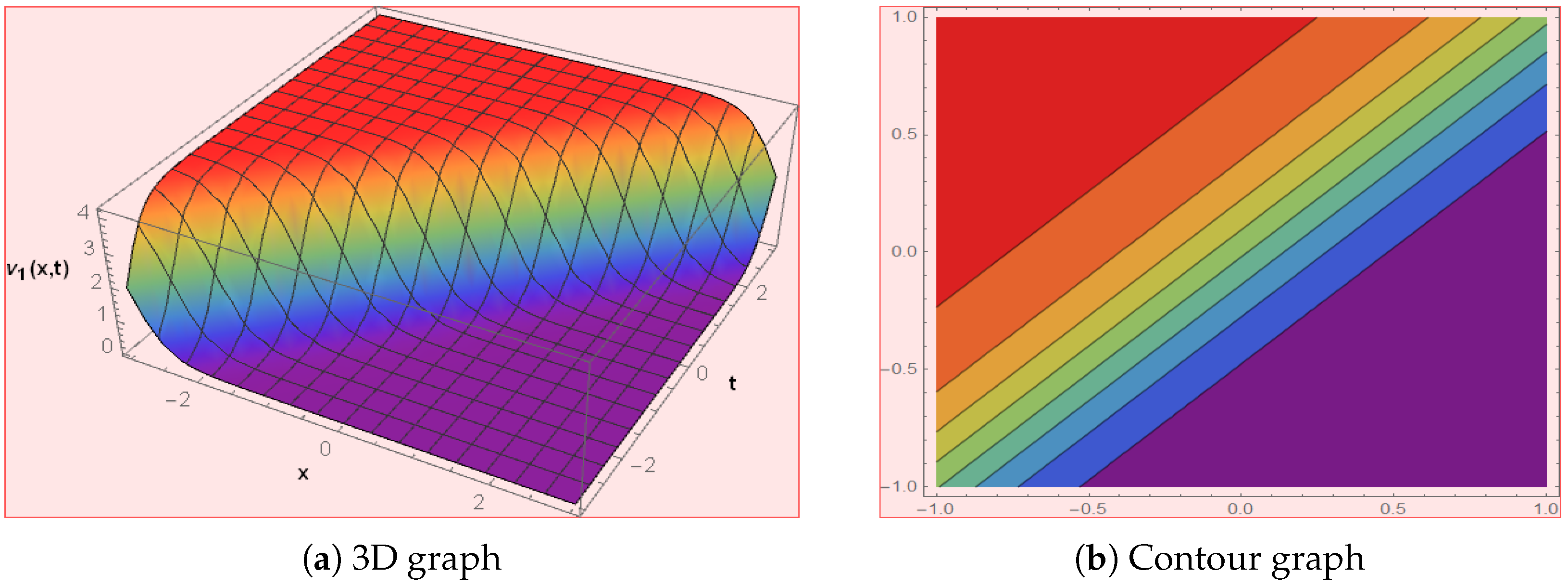
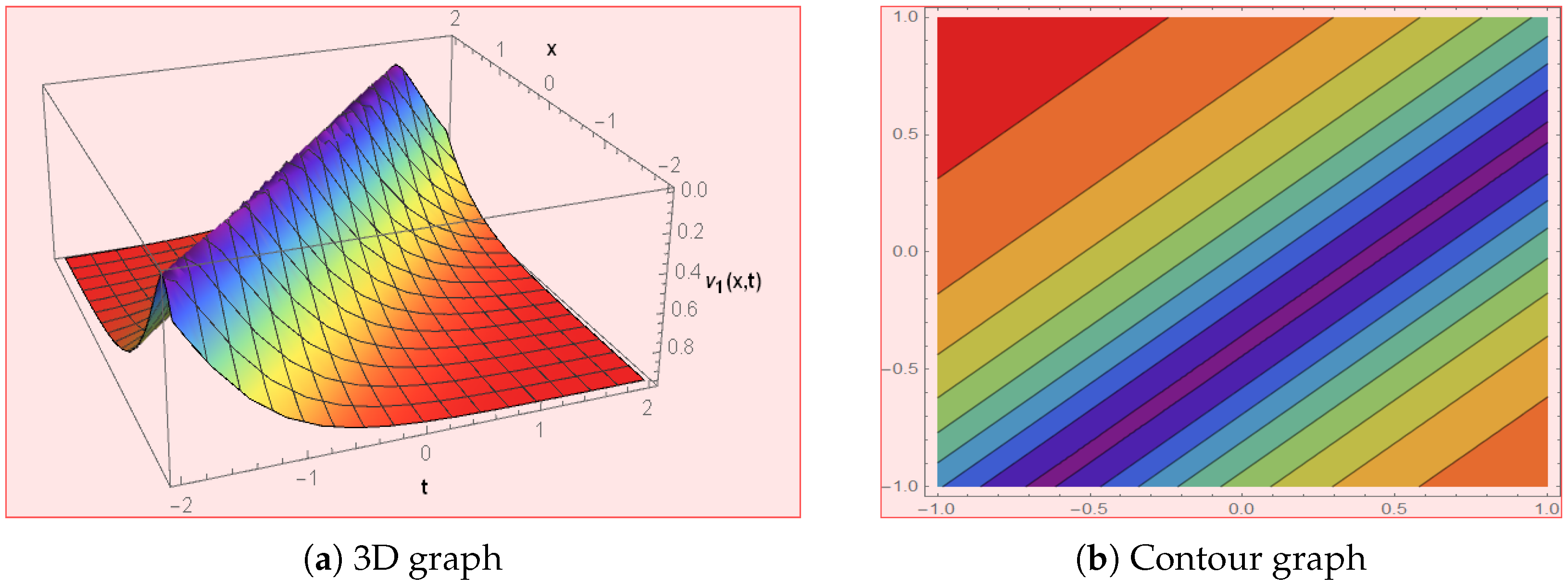
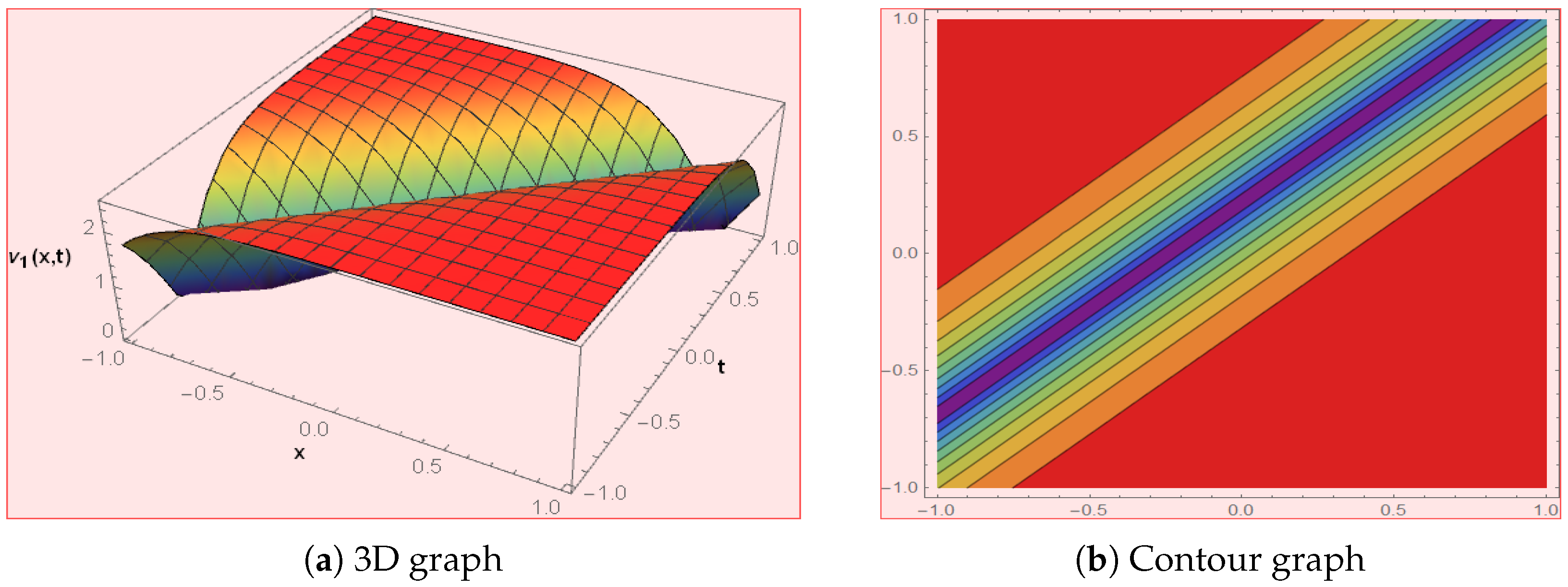
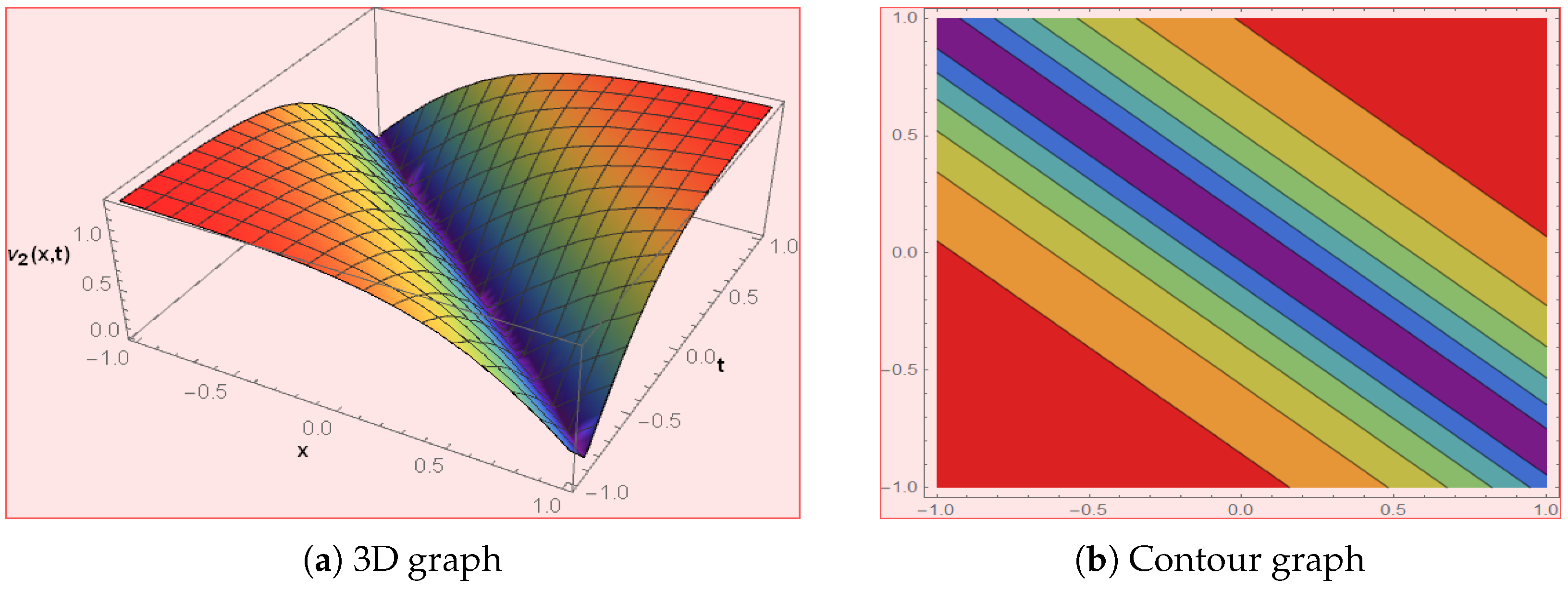
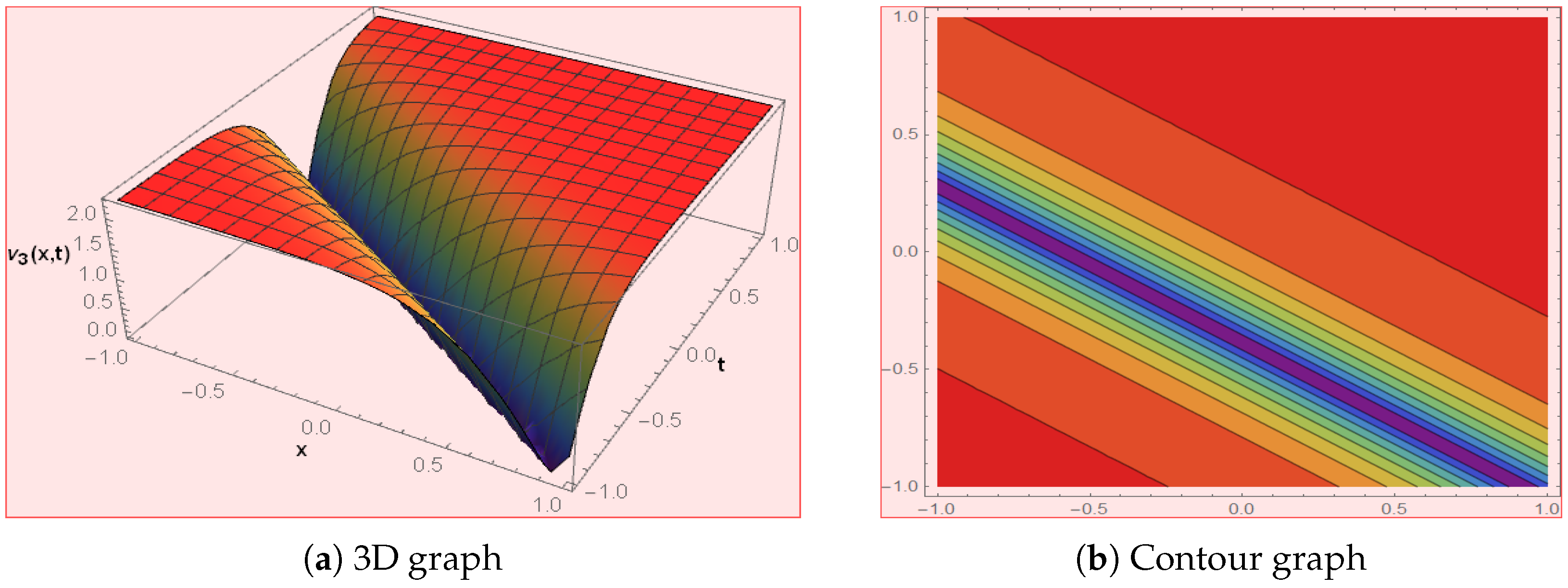
4. Graphical Presentations
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Younas, U.; Ren, J.; Baber, M.Z.; Yasin, M.W.; Shahzad, T. Ion-acoustic wave structures in the fluid ions modeled by higher dimensional generalized Korteweg-de Vries–Zakharov–Kuznetsov equation. J. Ocean Eng. Sci. 2022, 7, 1–13. [Google Scholar] [CrossRef]
- Goswami, A.; Singh, J.; Kumar, D.; Gupta, S. An efficient analytical technique for fractional partial differential equations occurring in ion acoustic waves in plasma. J. Ocean Eng. Sci. 2019, 4, 85–99. [Google Scholar] [CrossRef]
- Dubinov, A.E. Gas-dynamic approach to the theory of non-linear ion-acoustic waves in plasma with Kaniadakis’ distributed species. Adv. Space Res. 2023, 71, 1108–1115. [Google Scholar] [CrossRef]
- Usman, M.; Hussain, A.; Zaman, F.D.; Khan, I.; Eldin, S.M. Reciprocal Bäcklund transformations and travelling wave structures of some nonlinear pseudo-parabolic equations. Partial Differ. Equ. Appl. Math. 2023, 7, 100490. [Google Scholar] [CrossRef]
- Lipatov, A.S. The Hybrid Multiscale Simulation Technology: An Introduction with Application to Astrophysical and Laboratory Plasmas; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2002. [Google Scholar]
- Xiang, C.; Wang, H. New Exact Solutions for Benjamin-Bona-Mahony-Burgers Equation. Open J. Appl. Sci. 2020, 10, 543–550. [Google Scholar] [CrossRef]
- Yang, L. Application of classification of traveling wave solutions to the Zakhrov-Kuznetsov-Benjamin-Bona-Mahony equation. Appl. Math. 2014, 5, 1432. [Google Scholar] [CrossRef]
- Akcagil, S.; Aydemir, T.; Gozukizil, O.F. Exact travelling wave solutions of nonlinear pseudoparabolic equations by using the Expansion Method. New Trends Math. Sci. 2016, 4, 51–66. [Google Scholar] [CrossRef]
- Liu, J.G.; Du, J.Q.; Zeng, Z.F.; Ai, G.P. Exact periodic cross-kink wave solutions for the new (2+1)-dimensional KdV equation in fluid flows and plasma physics. Chaos Interdiscip. J. Nonlinear Sci. 2016, 26, 103114. [Google Scholar] [CrossRef]
- Song, L.M.; Yang, Z.J.; Li, X.L.; Zhang, S.M. Coherent superposition propagation of Laguerre–Gaussian and Hermite–Gaussian solitons. Appl. Math. Lett. 2020, 102, 106114. [Google Scholar] [CrossRef]
- Shen, S.; Yang, Z.J.; Pang, Z.G.; Ge, Y.R. The complex-valued astigmatic cosine-Gaussian soliton solution of the nonlocal nonlinear Schrödinger equation and its transmission characteristics. Appl. Math. Lett. 2022, 125, 107755. [Google Scholar] [CrossRef]
- Shen, S.; Yang, Z.; Li, X.; Zhang, S. Periodic propagation of complex-valued hyperbolic-cosine-Gaussian solitons and breathers with complicated light field structure in strongly nonlocal nonlinear media. Commun. Nonlinear Sci. Numer. Simul. 2021, 103, 106005. [Google Scholar] [CrossRef]
- Li, X.L.; Guo, R. Interactions of Localized Wave Structures on Periodic Backgrounds for the Coupled Lakshmanan–Porsezian–Daniel Equations in Birefringent Optical Fibers. Ann. Phys. 2023, 535, 2200472. [Google Scholar] [CrossRef]
- Zou, Z.; Guo, R. The Riemann–Hilbert approach for the higher-order Gerdjikov–Ivanov equation, soliton interactions and position shift. Commun. Nonlinear Sci. Numer. Simul. 2023, 124, 107316. [Google Scholar] [CrossRef]
- Zhang, S.; Zhu, F.; Xu, B. Localized Symmetric and Asymmetric Solitary Wave Solutions of Fractional Coupled Nonlinear Schrödinger Equations. Symmetry 2023, 15, 1211. [Google Scholar] [CrossRef]
- Taghizadeh, N.; Mirzazadeh, M. The direct algebraic method to complex nonlinear partial differential equations. Int. J. Appl. Math. Comput. 2013, 5, 12–16. [Google Scholar]
- Sulaiman, T.A.; Younas, U.; Younis, M.; Ahmad, J.; Rehman, S.U.; Bilal, M.; Yusuf, A. Modulation instability analysis, optical solitons and other solutions to the (2+ 1)-dimensional hyperbolic nonlinear Schrodinger’s equation. Comput. Methods Differ. Equ. 2022, 10, 179–190. [Google Scholar]
- Seadawy, A.R.; Younis, M.; Baber, M.Z.; Rizvi, S.T.; Iqbal, M.S. Diverse acoustic wave propagation to confirmable time–space fractional KP equation arising in dusty plasma. Commun. Theor. Phys. 2021, 73, 115004. [Google Scholar] [CrossRef]
- Shahzad, T.; Baber, M.Z.; Ahmad, M.O.; Ahmed, N.; Akgül, A.; Ali, S.M.; Ali, M.; El Din, S.M. On the analytical study of predator–prey model with Holling-II by using the new modified extended direct algebraic technique and its stability analysis. Results Phys. 2023, 51, 106677. [Google Scholar] [CrossRef]
- Baber, M.Z.; Seadway, A.R.; Iqbal, M.S.; Ahmed, N.; Yasin, M.W.; Ahmed, M.O. Comparative analysis of numerical and newly constructed soliton solutions of stochastic Fisher-type equations in a sufficiently long habitat. Int. J. Mod. Phys. 2023, 37, 2350155. [Google Scholar] [CrossRef]
- Younas, U.; Sulaiman, T.A.; Ren, J. On the optical soliton structures in the magneto electro-elastic circular rod modeled by nonlinear dynamical longitudinal wave equation. Opt. Quantum Electron. 2022, 54, 688. [Google Scholar] [CrossRef]
- Feng, Q. A new approach for seeking coefficient function solutions of conformable fractional partial differential equations based on the Jacobi elliptic equation. Chin. J. Phys. 2018, 56, 2817–2828. [Google Scholar] [CrossRef]
- Hirota, R. The Direct Method in Soliton Theory (No. 155); Cambridge University Press: Cambridge, UK, 2004. [Google Scholar]
- Ghosh, S.; Bharuthram, R. Ion acoustic solitons and double layers in electron–positron–ion plasmas with dust particulates. Astrophys. Space Sci. 2008, 314, 121–127. [Google Scholar] [CrossRef]
- Petviashvili, V.I.; Pokhotelov, O.A. Solitary Waves in Plasmas and in the Atmosphere; Taylor & Francis: London, UK, 1992. [Google Scholar]
- Yuan, W.; Xiao, B.; Wu, Y.; Qi, J. The general traveling wave solutions of the Fisher type equations and some related problems. J. Inequal. Appl. 2014, 2014, 1–15. [Google Scholar] [CrossRef]
- Wang, X.; Cao, J.; Chen, Y. Higher-order rogue wave solutions of the three-wave resonant interaction equation via the generalized Darboux transformation. Phys. Scr. 2015, 90, 105. [Google Scholar] [CrossRef]
- Liu, J.G.; Du, J.Q.; Zeng, Z.F.; Nie, B. New three-wave solutions for the (3+1)-dimensional Boiti–Leon–Manna–Pempinelli equation. Nonlinear Dyn. 2017, 88, 655–661. [Google Scholar] [CrossRef]
- Mihalache, D. Localized structures in optical and matter-wave media: A selection of recent studies. Rom. Rep. Phys. 2021, 73, 403. [Google Scholar]
- Ma, H.; Zhang, C.; Deng, A. New periodic wave, cross-kink wave, breather, and the interaction phenomenon for the (2+ 1)-dimensional Sharmo–Tasso–Olver equation. Complexity 2020, 2020, 4270906. [Google Scholar] [CrossRef]
- Alsallami, S.A.; Rizvi, S.T.; Seadawy, A.R. Study of stochastic–fractional Drinfel’d–Sokolov–Wilson equation for M-shaped rational, homoclinic breather, periodic and Kink-Cross rational solutions. Mathematics 2023, 11, 1504. [Google Scholar] [CrossRef]
- Seadawy, A.R.; Rizvi, S.T.; Younis, M.; Ashraf, M.A. Breather, multi-wave, periodic-cross kink, M-shaped and interactions solutions for perturbed NLSE with quadratic cubic nonlinearity. Opt. Quantum Electron. 2021, 53, 1–14. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ceesay, B.; Baber, M.Z.; Ahmed, N.; Akgül, A.; Cordero, A.; Torregrosa, J.R. Modelling Symmetric Ion-Acoustic Wave Structures for the BBMPB Equation in Fluid Ions Using Hirota’s Bilinear Technique. Symmetry 2023, 15, 1682. https://doi.org/10.3390/sym15091682
Ceesay B, Baber MZ, Ahmed N, Akgül A, Cordero A, Torregrosa JR. Modelling Symmetric Ion-Acoustic Wave Structures for the BBMPB Equation in Fluid Ions Using Hirota’s Bilinear Technique. Symmetry. 2023; 15(9):1682. https://doi.org/10.3390/sym15091682
Chicago/Turabian StyleCeesay, Baboucarr, Muhammad Zafarullah Baber, Nauman Ahmed, Ali Akgül, Alicia Cordero, and Juan R. Torregrosa. 2023. "Modelling Symmetric Ion-Acoustic Wave Structures for the BBMPB Equation in Fluid Ions Using Hirota’s Bilinear Technique" Symmetry 15, no. 9: 1682. https://doi.org/10.3390/sym15091682
APA StyleCeesay, B., Baber, M. Z., Ahmed, N., Akgül, A., Cordero, A., & Torregrosa, J. R. (2023). Modelling Symmetric Ion-Acoustic Wave Structures for the BBMPB Equation in Fluid Ions Using Hirota’s Bilinear Technique. Symmetry, 15(9), 1682. https://doi.org/10.3390/sym15091682