Abstract
There are several versions of the damped form of the celebrated Pinney equation, which is the natural partner of the undamped time-dependent harmonic oscillator. In this work, these dissipative versions of the Pinney equation are briefly reviewed. We show that Noether’s theorem for the usual time-dependent harmonic oscillator as a guiding principle for derivation of the Pinney equation also works in the damped case, selecting a Noether symmetry-based damped Pinney equation. The results are extended to general nonlinear damped Ermakov systems. A certain time-rescaling always allows to remove the damping from the final equations.
1. Introduction
The Pinney equation [1] is the natural partner of the time-dependent harmonic oscillator (TDHO) equation, as was recognized from its relevance for the construction of the Ermakov invariant [2]. It is reasonable to ask what a distinguished dissipative version of such a model look like, if one existed. Indeed, the subject caught attention in the literature, and there are some alternative versions of the damped Pinney equation. The present work strictly follows the Noether theorem as a guiding principle for the derivation of the Pinney equation, both in damped and undamped cases. The results found suggest an extension to general dissipative nonlinear Ermakov systems, as we shall show.
The proposal of symmetry principles for time-dependent dissipative systems certainly is not new. For instance, Cariñena and de Lucas considered Lie systems for certain dissipative Ermakov systems [3]. Brazier and Leach [4] have applied Noether’s theorem for the Lagrangians of the kind
and nonlinear generalizations (also see [5]), and derived a damped version of the Pinney equation, to be reviewed here. The quadratic potential in Equation (1) has also been treated elsewhere, as in [6,7,8,9].
Some different models consider, for instance, approximate solutions for the simplest damped Pinney equation, obtained just by adding a damping term linear in the velocity [10]. Dissipative harmonic oscillator systems with a quadratic dependence on the velocity together with non-standard Lagrangians can also be enumerated [11,12,13]. Generalized damped Ermakov systems have been derived by means of Sundman transformations [14]. Dissipative Ermakov–Milne–Pinney systems with Liénard-type equations can also be derived, by means of nonlocal transformations [15]. Integrable equations with Ermakov–Pinney nonlinearities and Chiellini damping have been found [16], and also in the treatment of barotropic FRW cosmological models [17].
This study considers only Noether point symmetries as a guiding principle for derivation of the dissipative Pinney equation and the corresponding invariants. Obviously, this does not imply any criticism of the available alternative versions of damped Pinney and Ermakov equations. The presented treatment herein follows a progressive route, starting from the simplest to the more complex cases. Section 2 presents the undamped case and basic methods. Section 3 details the physically important case of a constant linear in velocity damping term. Section 4 unveils the more general case of a damping term linear in the velocity and also admitting time dependence. The known results in the literature are then reviewed. Section 5 extends the previous results to general nonlinear damped Ermakov systems. It is also shown that the damping term in the symmetry-generated damped Pinney and Ermakov equations and dissipative TDHO equation can always be removed by means of a rescaling of time. Section 6 is reserved for the conclusions.
2. Pinney Equation from Noether Symmetry of the Time-Dependent Harmonic Oscillator
The TDHO equation
is derivable from the Lagrangian
The existence of a variational principle allows the search for first integrals following Noether’s theorem.
According to Noether’s theorem, the invariance of the action functional (up to the addition of a numerical constant) can be associated with a constant of motion. For a Lagrangian , consider a general point symmetry generator
where and . The corresponding generator of the first extended group is then
where
The Noether symmetry condition is
where for a point transformation one has a gauge function . The associated Noether invariant is
Inserting the Lagrangian from Equation (3) into the symmetry condition (7) yields a third-order polynomial in the velocity, whose monomials corresponding to different powers of should all be zero. Solving the resulting equations is a simple subject, yielding
where
Details on the procedure and the explicit realization of the symmetry algebra can be found in [18], with application to graphene models. From Equation (8) the resulting Noether invariant is
At this moment, one can set , where is a function to be determined. Integrating the linear homogeneous third-order Equation (10) once yields the Pinney equation
where k is the integration constant, a first integral for Equation (10) in this context [19]. A simple algebra allows us to rewrite the Noether invariant (12) as
after setting disregarding the Wronskian part. The first integral in Equation (12) is known as Ermakov invariant [2] and appears in many areas. In this sense, the partner Equation (13) for the TDHO equation follows from Noether symmetry. This provides a symmetry principle for the derivation of Pinney’s equation. It can be remarked that the invariant (14) can be directly deduced after eliminating between Equations (2) and (14), without reference to symmetry invariance [1] (also see, e.g., [20]). Moreover, the Ermakov invariant is invariant under the transformation group, namely as readily found—this is a general property, i.e., the form invariance of the Noether invariant under Noether symmetry [21]. Also notice that actually Equation (12) contains five invariants, corresponding to the linearly independent solutions of the systems (10) and (11). Moreover, the group of Noether point symmetries is a subgroup of the full point symmetry group of the TDHO [22]. A recent review on Ermakov systems and their symmetries appears in [23].
3. Pinney Equation from Noether Symmetry of the Damped Time-Dependent Harmonic Oscillator
The damped TDHO equation
where is a numerical constant derivable from the Caldirola–Kanai [24,25] Lagrangian
Inserting the Lagrangian from Equation (16) into the symmetry condition (7) yields a third-order polynomial in the velocity , whose monomials corresponding to different powers of should all be zero. Solving the resulting equations yields
where
From Equation (8), the Noether invariant is
Obviously, setting recovers the undamped case results.
At this moment, we can set , where is a function to be determined. Integrating the linear homogeneous third-order Equation (18) once yields
where k is an integration constant. Equation (21) is the legitimate damped Pinney equation as the natural partner of the damped TDHO equation, in the context of Noether symmetry principles.
A simple algebra allows to rewrite the Noether invariant (20) as
after setting disregarding the Wronskian part.
Equations (21) and (22) provide damped versions of the Pinney equation and Ermakov invariant, in the simplest case of a constant (in time) linear in velocity damping. Moreover, the Noether and Ermakov invariants in Equations (20) and (22) are both invariant under the transformation group, namely as readily found. Notice that (20) actually contains five invariants, corresponding to five linearly independent solutions of the systems (18) and (19). It can be verified that in the same way as in the undamped case.
In the same sense as that for the undamped case, the Noether invariant can also be deduced from eliminating between Equations (15) and (21), without reference to symmetry invariance. After a short manipulation, this procedure yields
which can be integrated producing the invariant in Equation (22), set for the undamped limit. Notice the time dependence of the nonlinear term is essential in the damped Pinney Equation (21) for the existence of the constant of motion.
4. Time-Dependent Linear in Velocity Damping
Starting from the Lagrangian (1) yields
where is a time-dependent damping coefficient, generalizing the previous models. This case can be interpreted as a TDHO with a time-dependent mass—the previous section corresponds to a exponentially growing mass.
The analysis of Noether symmetries for this problem is well known [4]. In terms of the present notation, the results are
where
The Noether invariant is
Now setting where is a function to be determined gives
where k is a numerical constant found reducing the order of Equation (26). Setting disregarding the Wronskian part, the first integral in Equation (28) assumes the compact form
Similar remarks from the previous sections apply here, including the Ermakov invariant (30) being derivable eliminating the frequency between Equations (24) and (29). The previous results are all re-obtained setting either (undamped TDHO) or (for a constant damping coefficient ).
Equation (29) is the proper Pinney equation in the case of a time-dependent linear in velocity damped TDHO, derived from Noether symmetry. It was also derived in this context by Brazier and Leach [4]. This damped Pinney equation and the invariant (30) were found using different alternative approaches in many opportunities, for instance, in the treatment of Berry phases [26], parametric anharmonic oscillators [27], energy exchanges in the dissipative TDHO [28], from a canonical transformation method for the variable-mass TDHO [29], and quantum harmonic oscillators with time-dependent mass and frequency from a perturbative potential method [30]. It has also been identified from perturbations of Lagrangian systems based on the preservation of subalgebras of Noether symmetries [31].
5. Nonlinear Damped Ermakov Systems—Discussion and Generalization
The examination of the previous damped TDHO and damped Pinney equations suggests a nonlinear extension, based on the general Ermakov (or Ray–Reid) system [20], given by
where , , and are arbitrary functions of the indicated arguments.
Eliminating the frequency from Equations (31) and (32) and proceeding as before provides the invariant
which is a constant of motion, , as can be verified. Setting reduces to the traditional general Ermakov system [20]. Otherwise we have a realization of a damped general nonlinear Ermakov system. In spite of its simplicity, the systems (31) and (32) in connection with the invariant (33) are apparently new, to the best of our knowledge. Unlike for the derivation of damped Pinney equations, the present derivation is not based on symmetry principles but rather on the direct manipulation of the dynamical equations. Judicious choices of , and g encompass all the previous models.
It can be observed that a time-rescaling allows the elimination of the linear-in-velocity damping term. Defining a new time variable such that
converts Equations (35) and (36) into
where and a prime denotes the derivative with respect to the new time variable T. The Ermakov invariant becomes
all as if there was no damping at all, coming back to the traditional formulation [20]. The time-rescaling applies to all Noether symmetry-based Pinney equations and damped TDHOs considered here. In the case of a constant damping coefficient, this damping removal was performed in the treatment of dissipative Bose–Einstein condensates [32].
In practice, however, the formal removal of damping may not be so useful. For instance, consider a constant and a constant damping coefficient so that . In this case, one has , and finally
setting without a loss of generality. Therefore, the rescaled angular frequency comes from
which is asymptotically singular as . Therefore, the removal of damping comes at the expense of the introduction of singular terms (in time) in the equations of motion. The behavior of the new time from Equation (38) is shown in Figure 1.
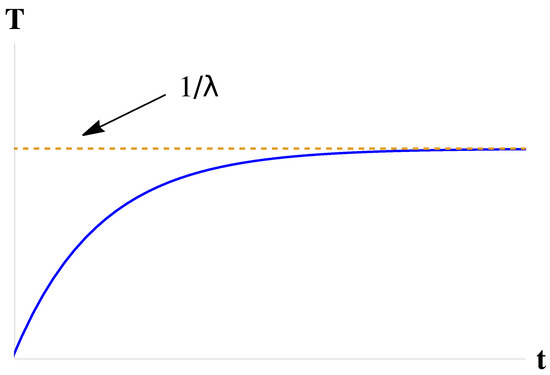
Figure 1.
Generic behavior of the new time T from Equation (38). Dashed: the asymptotic limit .
The presence of the factor on the right-hand side of Equations (31) and (32) is essential for the existence of the Ermakov invariant. The direct addition of linear in velocity damping terms would give the system
Eliminating the frequency between Equations (40) and (41) and defining
just yields
which is not a conservation law in general. Following Nassar [33], Equations (40) and (41) can be termed a damped non-Ermakov system, while Equations (31) and (32) can be termed a damped Ermakov system.
As a final, strong generalization, notice that the functions in Equations (31) and (32) do not need to be restricted to be functions of time only, without prejudice of the existence of the first integral in Equation (33), as long as . Indeed, the derivation of the invariant relies on the elimination of between the dynamical equations and the identification of the appropriate integrating factor. Consider the dynamical system
without specific details about the functions and m. The elimination procedure then yields
where I is the generalized Ermakov invariant in Equation (33), which is then a constant of motion provided .
As an illustration, suppose
so that
As demonstrated, the systems (44) and (45) admit the invariant (33), irrespective of the many details about besides Equation (47), provided respects Equation (48). In this particular case, the damping terms can have a quadratic dependence on the velocities .
To sum up, in principle, one has a new, large class of damped generalized Ermakov systems, which remains to be explored in more detail.
6. Conclusions
The damped Pinney equation was discussed in detail, from the point of view of Noether symmetry derivations. The general Noether symmetry-based damped Pinney Equation (29) was definitely identified, together with the associated Ermakov invariant (30), with a review on the existing literature about it. Following the route of a progressive analysis—from the undamped TDHO, to the damped TDHO with a constant damping coefficient, to the damped TDHO with time-dependent linear in velocity term—it is natural to consider the extension of the results to damped general nonlinear Ermakov systems. A new, large class of damped nonlinear Ermakov systems was then proposed. The TDHO and Pinney equations are ubiquitous in physics, engineering, and beyond, for instance, in plasma physics, gravitation and quantum optics (see, e.g., Ref. [30] and references therein). Hence, for the more realistic scenario where some damping mechanism is present, the damped Pinney equation is expected to be useful, as in the case of generalized dissipative cosmological models [17]. Moreover, the new class of damped nonlinear Ermakov systems can have applications, for example, in the case of a pendulum whose mass depends not only on time, but also on space. It would be important to unveil the properties of this new system in more detail, for instance, regarding its integrability or chaos features, in spite of the existence of the Ermakov invariant (33), which is not a sufficient condition for complete integrability. Finally, the removal of the damping in some specific cases by a re-definition of the time variable was critically discussed.
Funding
This research was funded by CNPq (Conselho Nacional de Desenvolvimento Científico e Tecnológico)—no grant number.
Data Availability Statement
No new data were created or analyzed in this study.
Conflicts of Interest
The author declares no conflicts of interest.
References
- Pinney, E. The nonlinear differential equation y′′+p(x)y+cy−3=0. Proc. Am. Math. Soc. 1950, 1, 681. [Google Scholar] [CrossRef]
- Ermakov, V.P. Second-order differential equations. Conditions of complete integrability. Univ. Isz. Kiev Series III 1880, 9, 1–25. [Google Scholar] [CrossRef]
- Cariñena, J.F.; de Lucas, J. Applications of Lie systems in dissipative Milne-Pinney equations. Int. J. Geom. Meth. Mod. Phys. 2009, 6, 683–699. [Google Scholar] [CrossRef]
- Brazier, T.I.; Leach, P.G.L. Invariants for dissipative systems and Noether’s theorem. Rev. Mex. Fís. 1994, 40, 378–385. [Google Scholar]
- González-Acosta, E.; Corona-Galindo, M.G. Noether’s theorem and the invariants for dissipative and driven dissipative like systems. Rev. Mex. Fís. 1992, 38, 511–517. [Google Scholar]
- Profilo, G.; Soliana, G. Noether invariants and complete Lie-Point symmetries for equations of the Hill type. Prog. Theor. Phys. 1990, 84, 974–992. [Google Scholar] [CrossRef]
- Profilo, G.; Soliana, G. Group-theoretical approach to the classical and quantum oscillator with time-dependent mass and frequency. Phys. Rev. A 1991, 44, 2057–2065. [Google Scholar] [CrossRef]
- Dodonov, V.V.; Man’ko, V.I. Evolution of multidimensional systems. Magnetic properties of ideal gases of charged particles. In Proceedings of the Lebedev Physics Institute of the Academy of Sciences of the USSR; Nova Science: Cornrnack, NY, USA, 1987; Volume 183. [Google Scholar]
- Simic, S.S. A note on generalization of the Lewis invariant and the Ermakov systems. J. Phys. A Math. Gen. 2000, 33, 5435–5447. [Google Scholar] [CrossRef]
- Haas, F. The damped Pinney equation and its applications to dissipative quantum mechanics. Phys. Scr. 2010, 81, 025004. [Google Scholar] [CrossRef]
- Musielak, Z.E. Standard and non-standard Lagrangians for dissipative dynamical systems with variable coefficients. J. Phys. A Math. Theor. 2008, 41, 055205. [Google Scholar] [CrossRef]
- Musielak, Z.E.; Roy, D.; Swift, L.D. Method to derive Lagrangian and Hamiltonian for a nonlinear dynamical system with variable coefficients. Chaos Solitons Fractals 2008, 38, 894–902. [Google Scholar] [CrossRef]
- Qian, S.-W.; Huang, B.-W.; Gu, Z.-Y. Ermakov invariant and the general solution for a damped harmonic oscillator with a force quadratic in velocity. J. Phys. A Math. Gen. 2001, 34, 5613–5617. [Google Scholar] [CrossRef]
- Guha, P.; Ghose-Choudhury, A. A note on generalization of the Ermakov–Lewis invariant and its demystification. Mod. Phys. Lett. A 2019, 34, 1950021. [Google Scholar] [CrossRef]
- Guha, P.; Ghose-Choudhury, A. Nonlocal transformations of the generalized Liénard type equations and dissipative Ermakov-Milne-Pinney systems. Int. J. Geom. Meth. Mod. Phys. 2019, 16, 1950107. [Google Scholar] [CrossRef]
- Mancas, S.C.; Rosu, H.C. Integrable equations with Ermakov-Pinney nonlinearities and Chiellini damping. Appl. Math. Comp. 2015, 259, 1–11. [Google Scholar] [CrossRef]
- Rosu, H.C.; Mancas, S.C.; Chen, P. Barotropic FRW cosmologies with Chiellini damping. Phys. Lett. A 2015, 379, 882–887. [Google Scholar] [CrossRef][Green Version]
- Haas, F. Noether symmetries and conservation laws of a reduced gauged bilayer graphene model. Phys. Lett. A 2023, 482, 129034–129039. [Google Scholar] [CrossRef]
- Leach, P.G.L.; Andriopoulos, K. The Ermakov equation: A comentary. Appl. Anal. Discr. Math. 2008, 2, 146–157. [Google Scholar] [CrossRef]
- Ray, J.R.; Reid, J.L. More exact invariants for the time dependent harmonic oscillator. Phys. Lett. A 1979, 71, 317–318. [Google Scholar] [CrossRef]
- Sarlet, W.; Cantrijn, F. Generalizations of Noether’s theorem in classical mechanics. SIAM Rev. 1981, 23, 467–494. [Google Scholar] [CrossRef]
- Leach, P.G.L. The complete symmetry group of the one-dimensional time-dependent harmonic oscillator. J. Math. Phys. 1980, 21, 300–304. [Google Scholar] [CrossRef]
- Cerveró, J.M.; Estévez, P.G. A review in Ermakov systems and their symmetries. Symmetry 2021, 13, 493. [Google Scholar] [CrossRef]
- Caldirola, P. Quantum theory of nonconservative systems. Il Nuovo Cimento B 1983, 77, 241–262. [Google Scholar] [CrossRef]
- Kanai, E. On the quantization of the dissipative systems. Prog. Theor. Phys. 1948, 77, 440–442. [Google Scholar] [CrossRef]
- Maamache, M. Ermakov systems, exact solution, and geometrical angles and phases. Phys. Rev. A 1995, 52, 936–940. [Google Scholar] [CrossRef]
- Gallegos, A.; Vargas-Rodríguez, Macías-Díaz, J. E. Ermakov-Lewis invariants for a class of parametric anharmonic oscillators. Rev. Mex. Fís. 2017, 63, 162–165. [Google Scholar]
- Guasti, M.F. Energy exchange in the dissipative time-dependent harmonic oscillator: Physical interpretation of the Ermakov invariant. Pramana J. Phys. 2022, 96, 221. [Google Scholar] [CrossRef]
- Pedrosa, I.A. Canonical transformations and exact invariants for dissipative systems. J. Math. Phys. 1987, 28, 2662–2664. [Google Scholar] [CrossRef]
- Dantas, C.M.A.; Pedrosa, I.A.; Baseia, B. Harmonic oscillator with time-dependent mass and frequency and a perturbative potential. Phys. Rev. A 1992, 45, 1320–1324. [Google Scholar] [CrossRef]
- Campoamor-Stursberg, R. Perturbations of Lagrangian systems based on the preservation of subalgebras of Noether symmetries. Acta Mech. 2016, 227, 1941–1956. [Google Scholar] [CrossRef]
- Schuch, D.; Kaushal, R.S. Some remarks on dissipative Ermakov systems and damping in Bose–Einstein condensates. J. Phys. Conf. Ser. 2011, 306, 012032. [Google Scholar] [CrossRef]
- Nassar, A.B. Ermakov and non-Ermakov systems in quantum dissipative models. J. Math. Phys. 1986, 27, 755–758. [Google Scholar] [CrossRef]

Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).