

Modeling and Simulation of an Integrated Synchronous Generator Connected to an Infinite Bus through a Transmission Line in Bond Graph

 , and
, and 
Abstract
1. Introduction
- A bond graph can determine models of linear, nonlinear, time-varying systems with concentrated or distributed parameters in a clear and simple way.
- A bond graph allows for knowing the linearly independent or dependent state variables from the causality of the storage elements, while in other modeling methods they are not clear.
- The properties of structural controllability and structural observability are obtained from causal trajectories without requiring the mathematical model of the system.
- The steady state response of the state variables for a linear system or for a class of nonlinear systems requires calculating the inverse matrix of states; in a bond graph, this inverse matrix is obtained by changing the causality of the storage elements.
- If there is a change in the system configuration in a bond graph, it only requires including those changes, and in traditional methods, it is generally necessary to obtain the model from the beginning. This feature is very interesting for the analysis of system failures.
- Model reduction in a bond graph is obtained by knowing the causal relationships between the elements, while in traditional methods, it can be carried out with an in-dept knowledge of the model.
- A bond graph allows for obtaining models formed by systems with various energy domains (electrical, mechanical, hydraulic, thermal, magnetic) such as the synchronous generator, which is an electromechanical system, and the relationships of the electrical and mechanical variables can be directly known.
- Although the scientific community knows bond graph modeling, the properties have not been fully disseminated and its application sometimes requires an in-depth knowledge of bond graph.
- Some systems may have problems in the application of causality and this may lead to introducing auxiliary elements to the system that are only known by bond graph experts.
- Systems with switching elements such as power electronics require careful consideration in the choice of switching elements.
- Due to the unified characteristics that the bond graph uses (momentum, displacement, effort and flow), obtaining other variables is not direct and care is required.
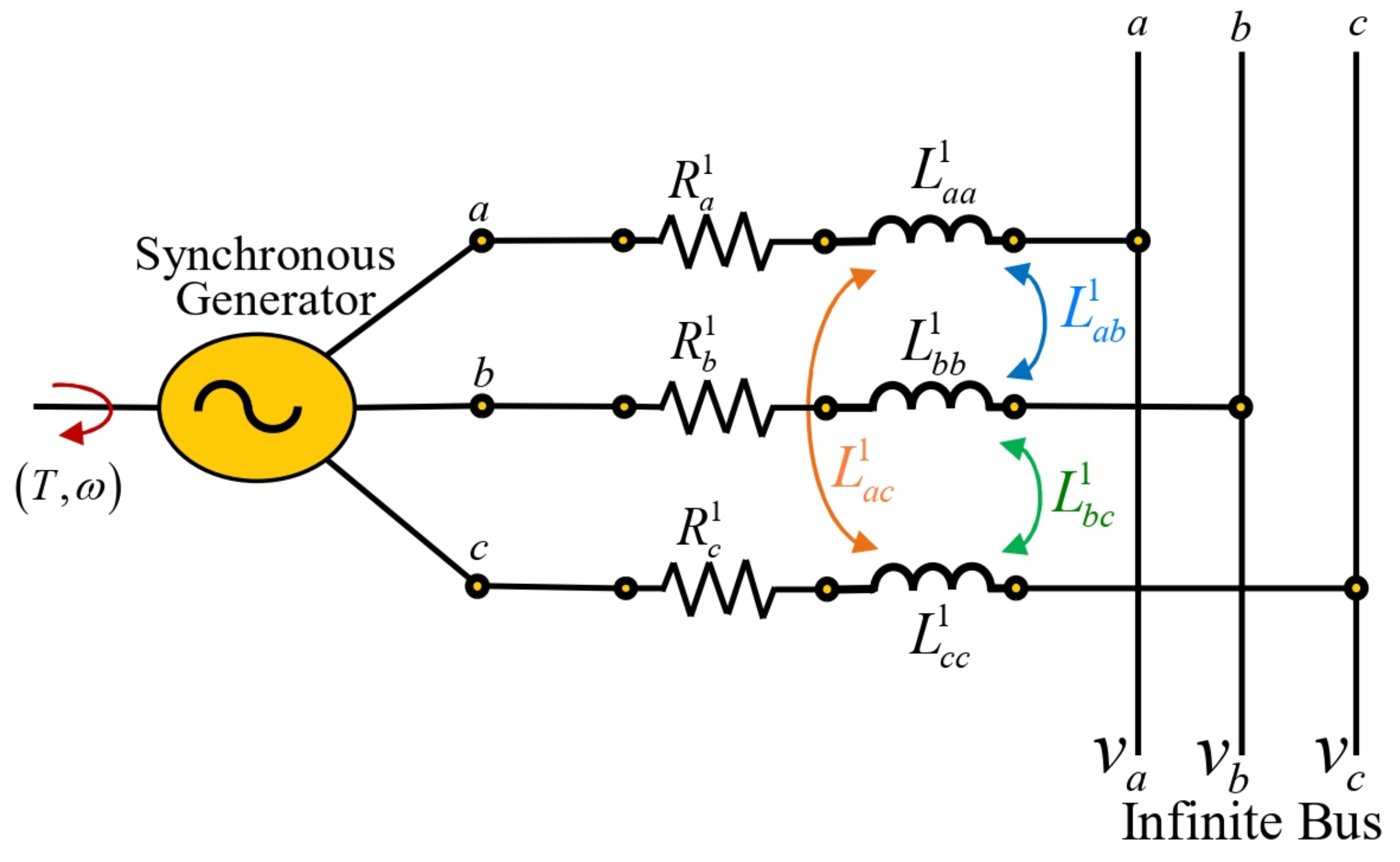
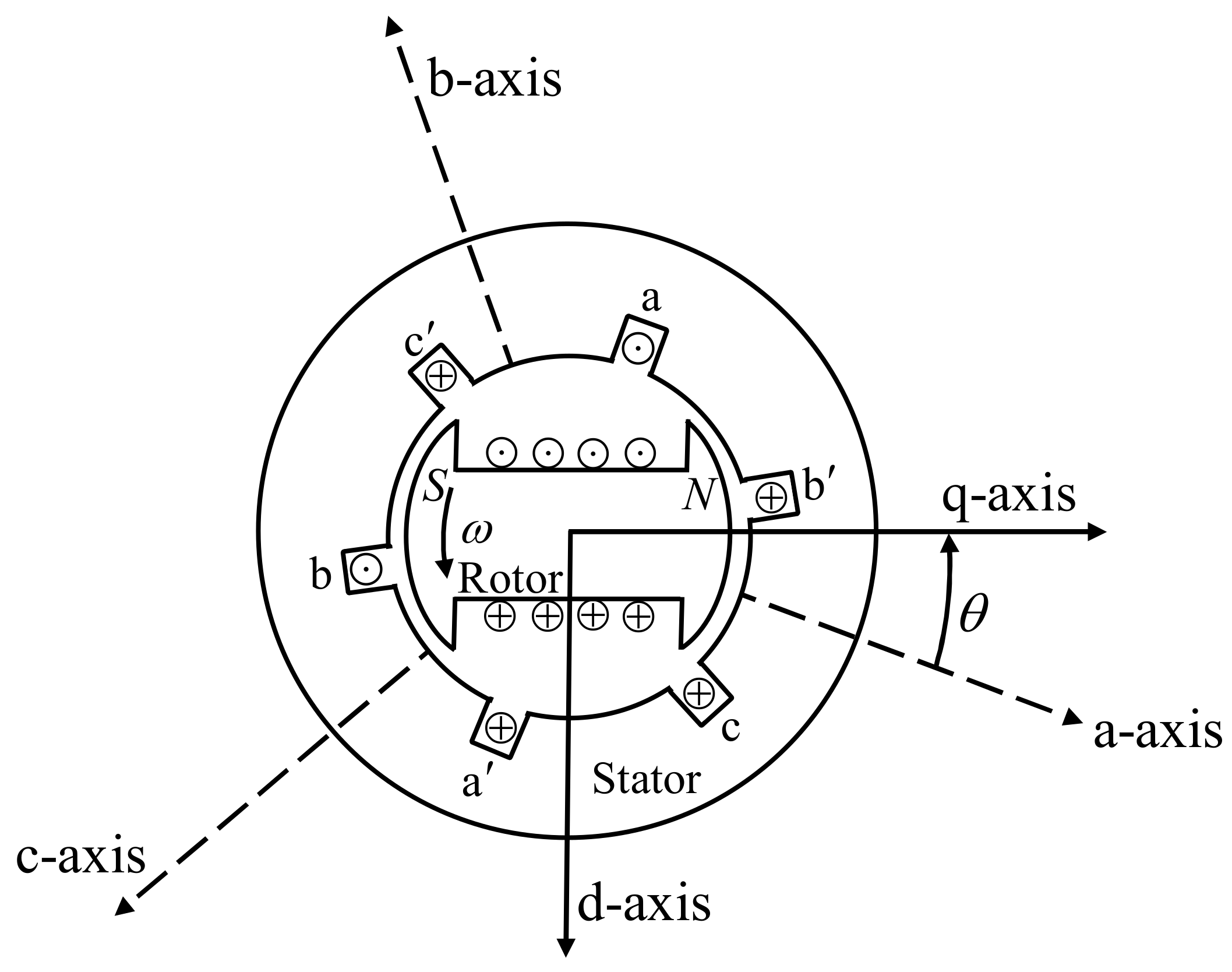
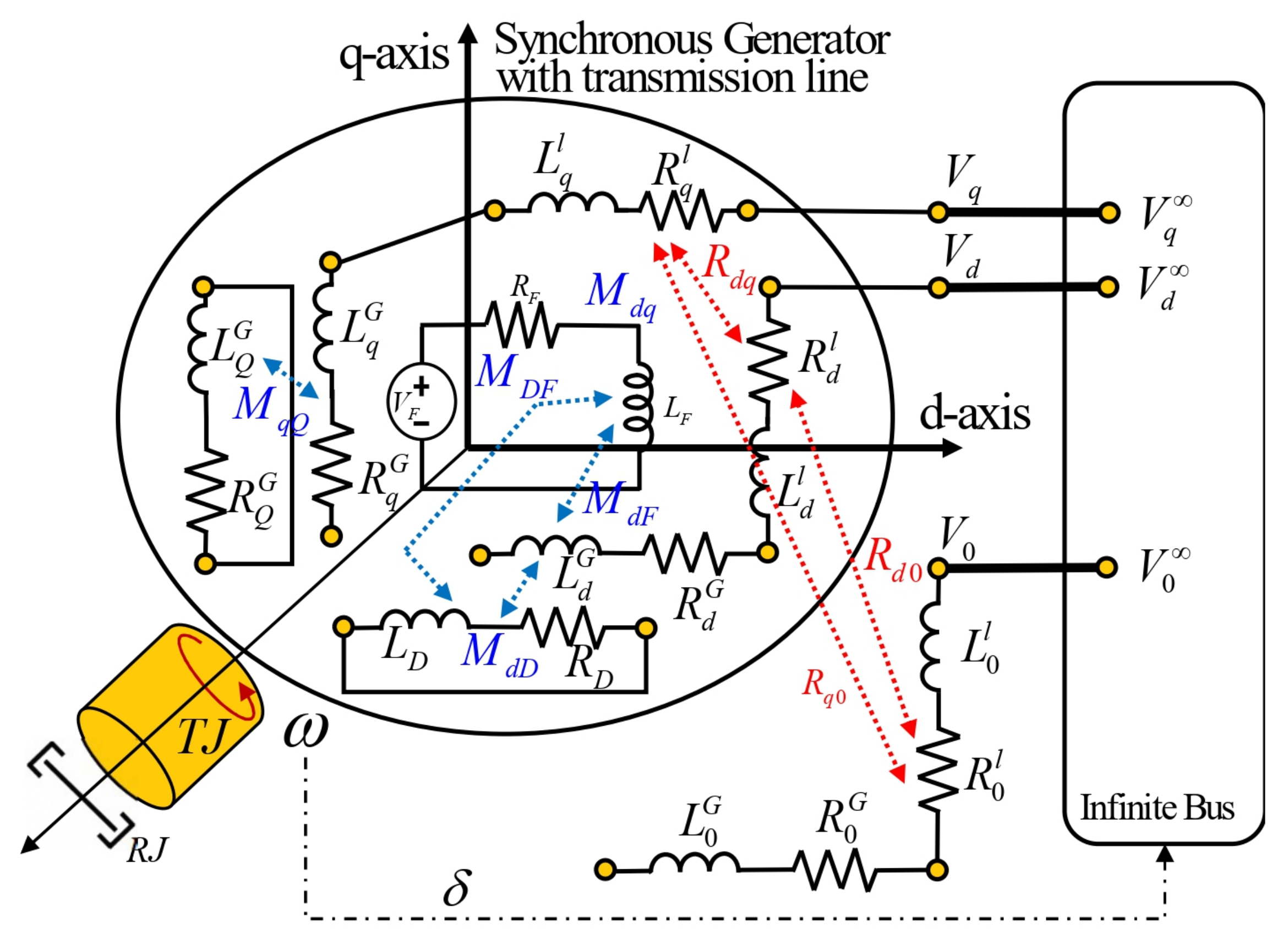
2. Classical Modeling of a Synchronous Generator—Infinite Bus
- In the air gap path, the stator windings have a sinusoidal distribution.
- The rotor inductances with respect to the position of the machine axis do not vary due to the stator slots.
- Magnetic saturation effects are not taken into account.
- The effects of magnetic hysteresis are negligible.
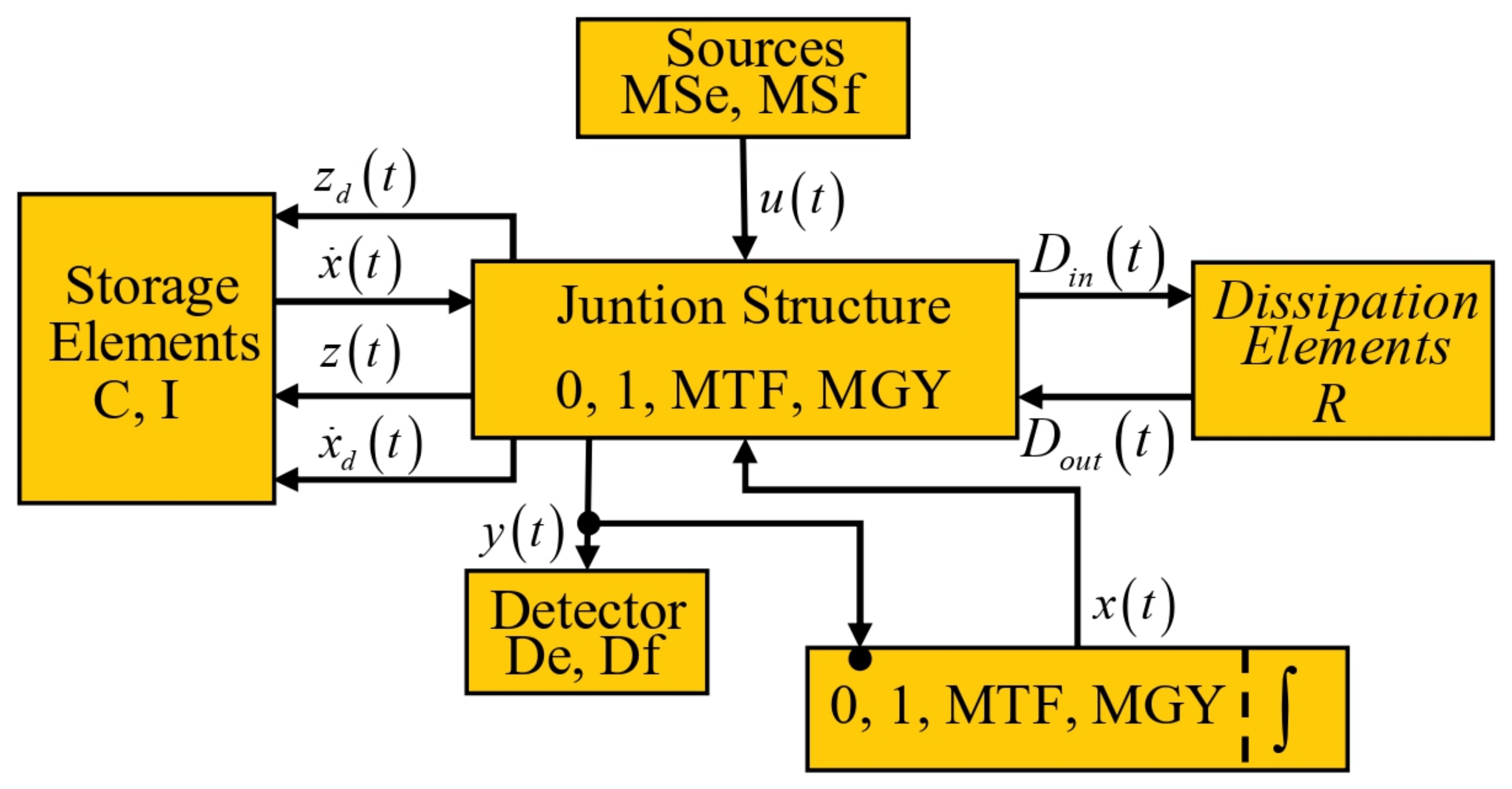
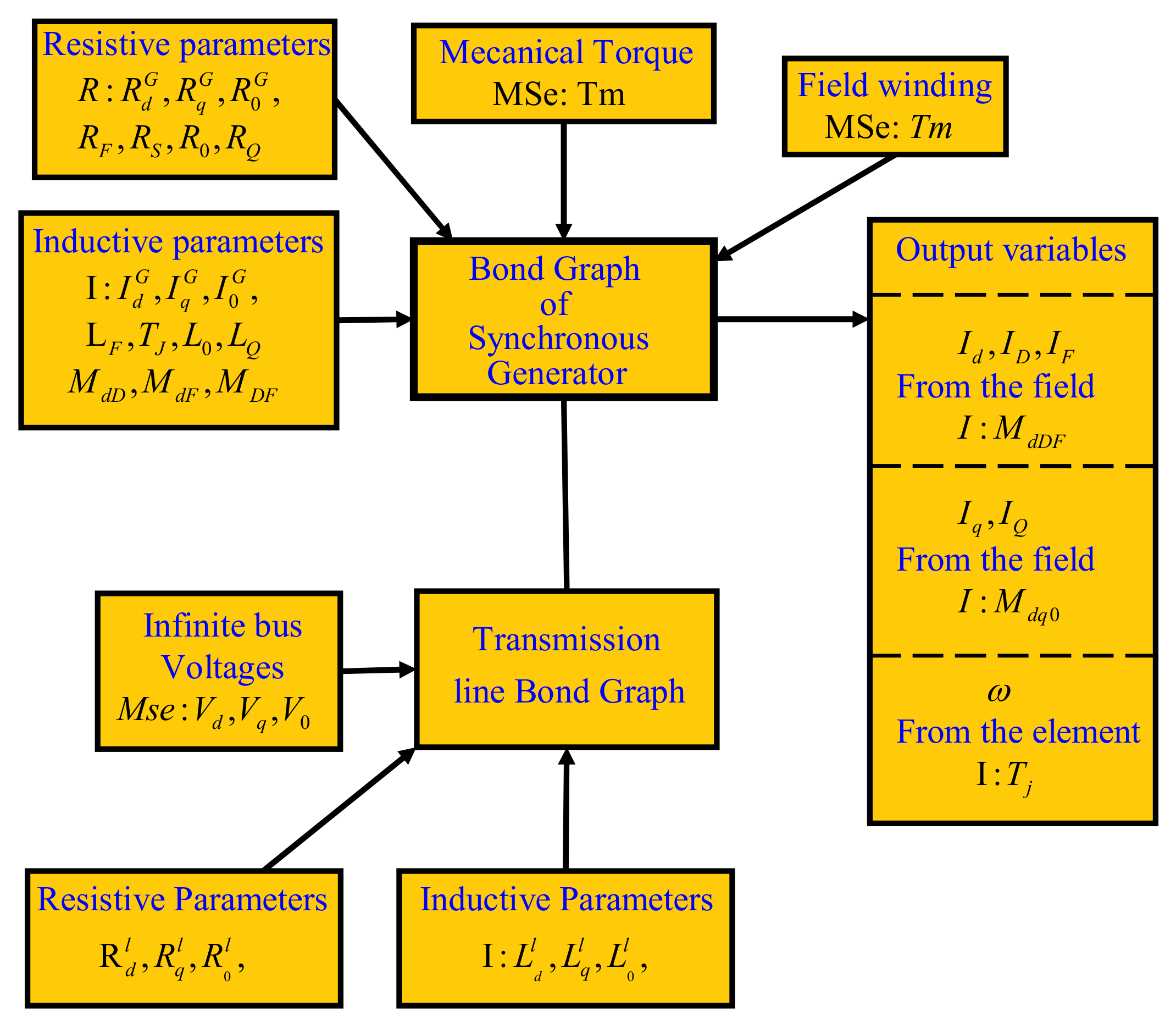
3. Synchronous Generator—Infinite Bus in a Bond Graph Approach
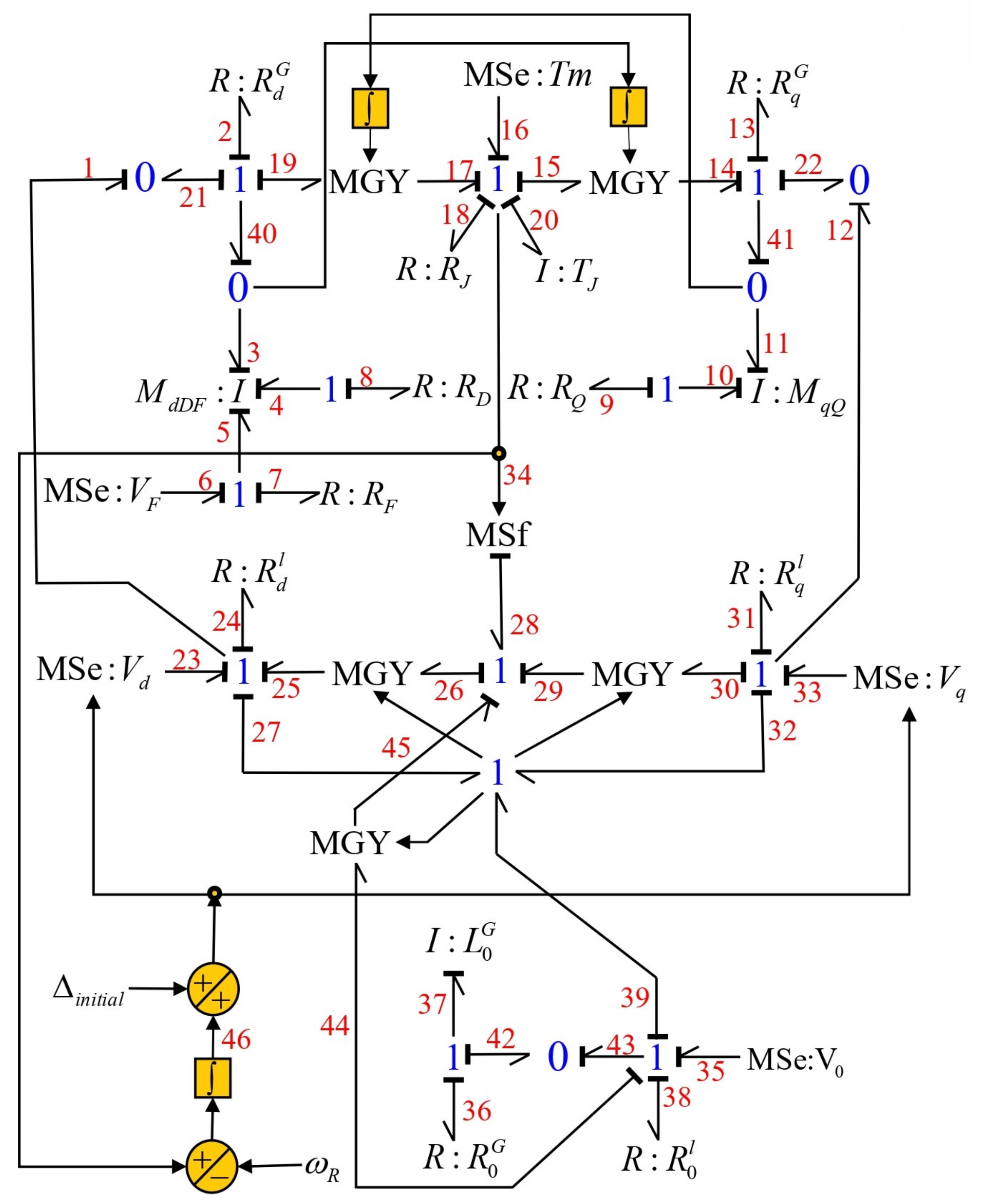
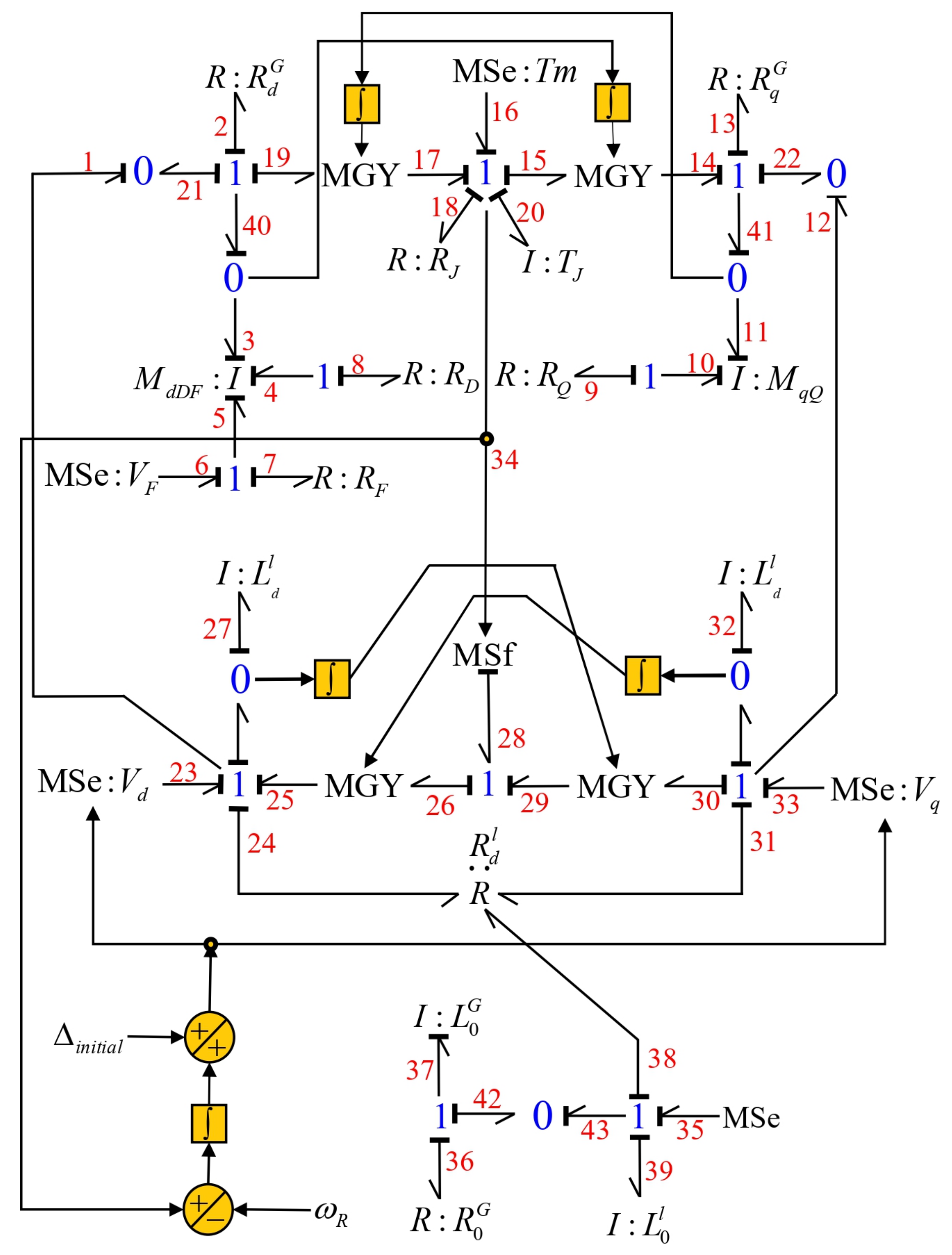
- Power supply is through the source field with input vector .
- The linearly independent state variables are obtained from the storage elements in integral causality assignment that determine the energy and co-energy defined by .
- The linearly dependent state variables that determine energy are obtained from the storage elements in derivative causality assignment, and the co-energy of these elements is given by .
- The energy dissipation elements are expressed by and .
- The system outputs are obtained from the detection field .
- The main junction structure that determines the interconnection of the different fields of the bond graph is formed by the junctions and by the modulated transformers and gyrators
- The junction substructure is required to be the variables that modulate .
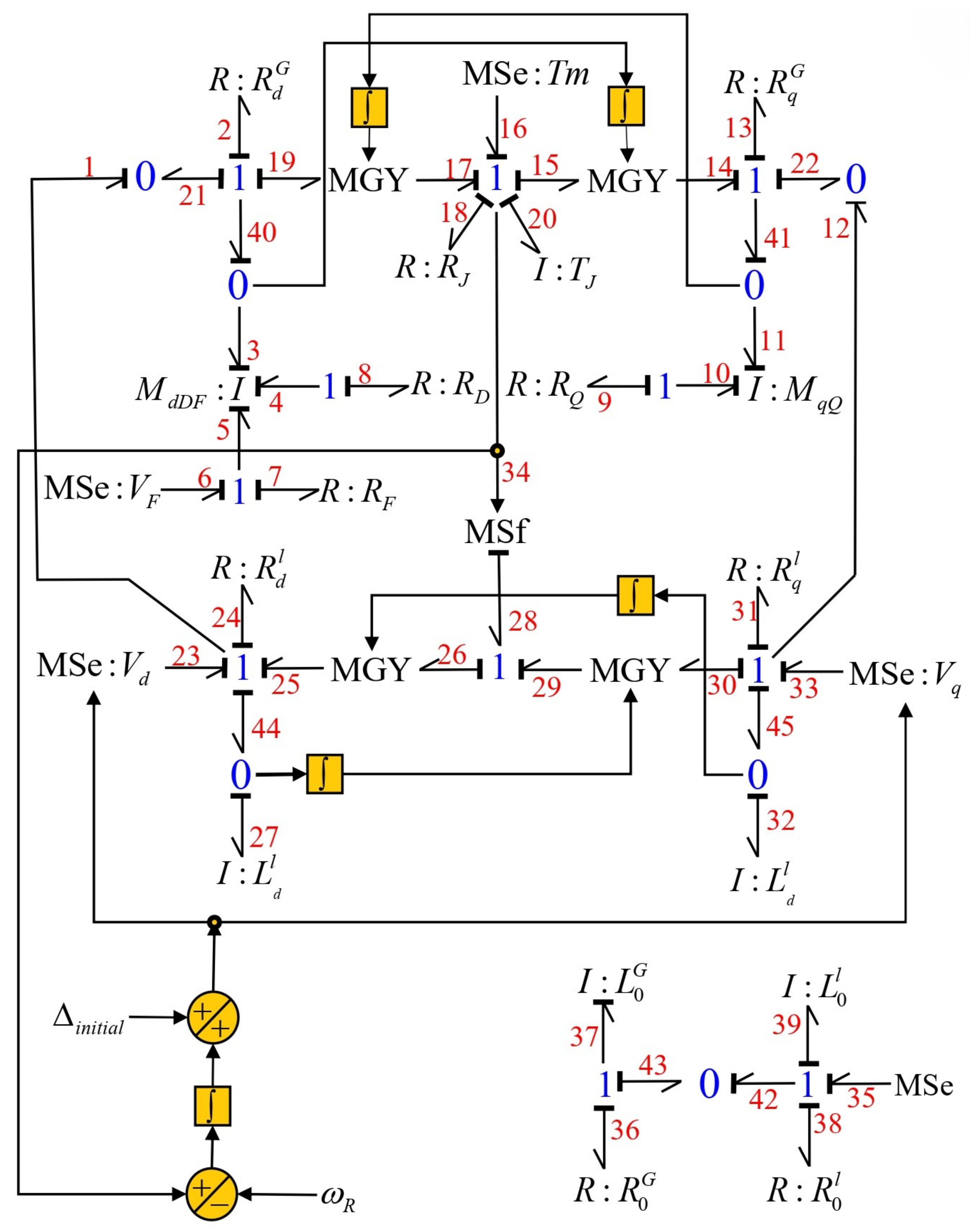
3.1. Case 1: Symmetrical Transmission Line
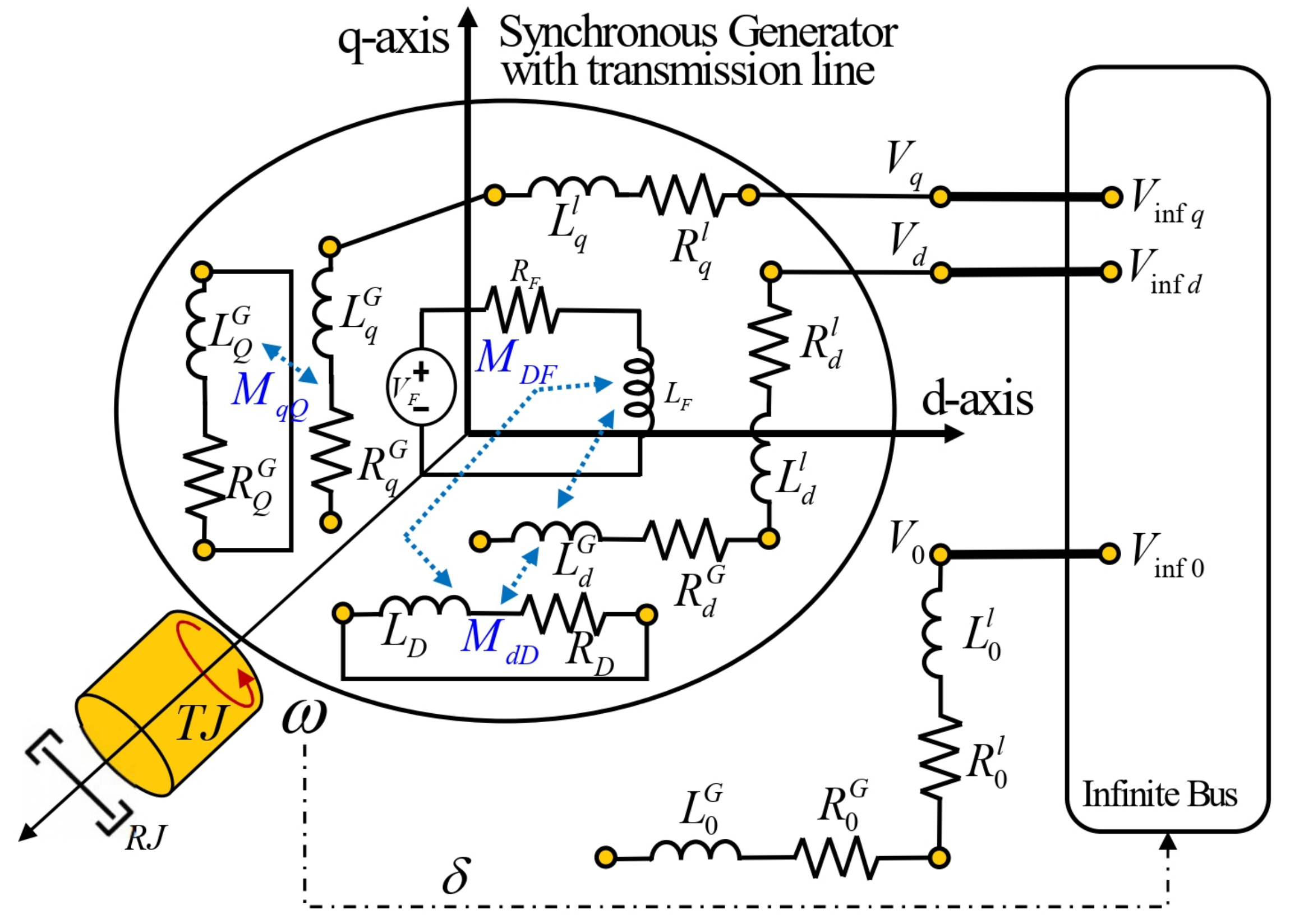
- , and denote the resistances in coordinates , respectively.
- and are the two damper windings on the d and q axes, respectively.
- The rotor circuit, called the field winding, is formed by the resistance and inductances and , respectively, and the supply voltage to this winding .
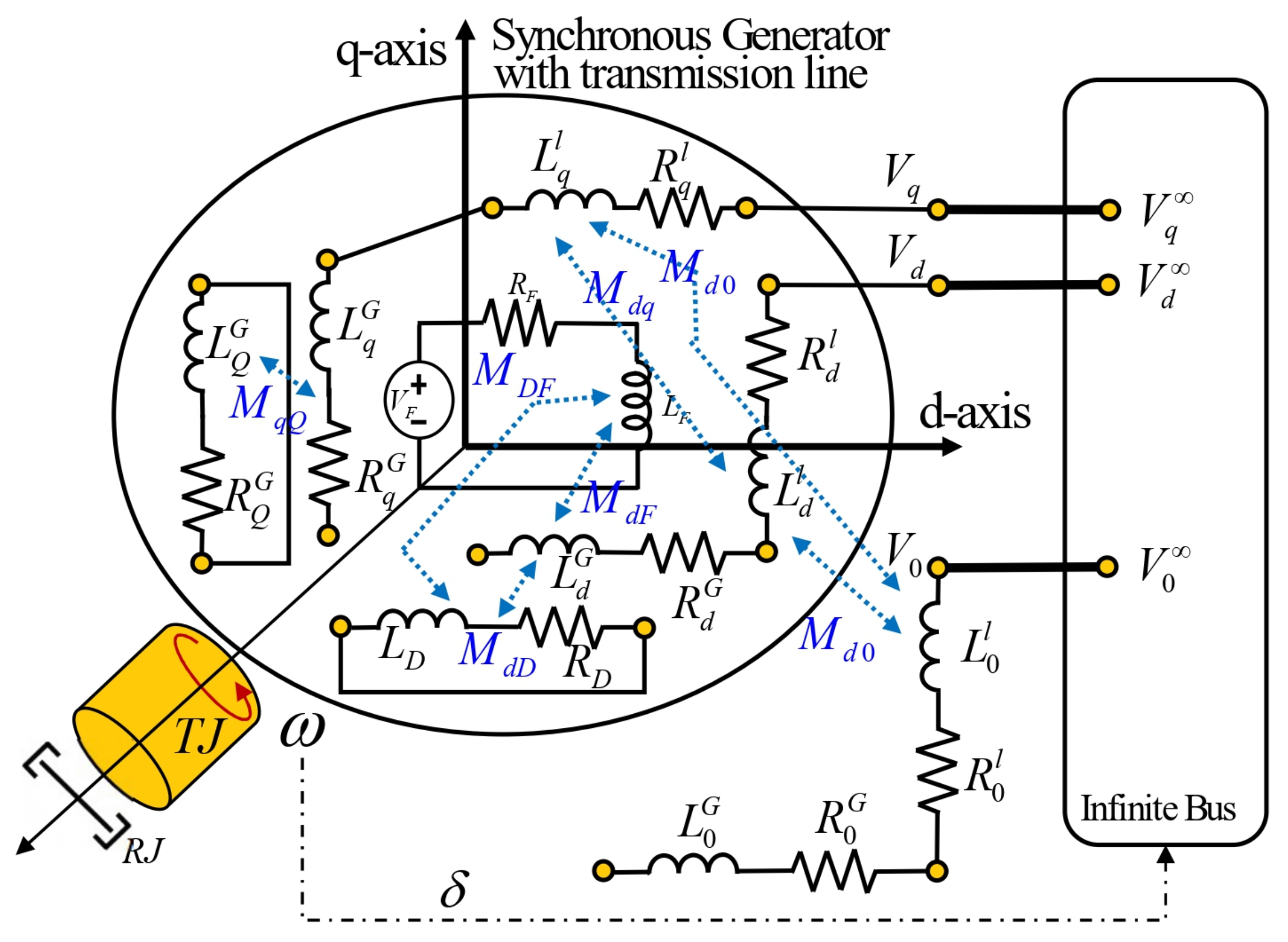
- The field of the storage elements for the generator on the d axis is defined by the constitutive relation given in (42) and contains the self-inductances , and and the mutual inductances , and .
- The field of the storage elements for the generator on the q axis is defined by the constitutive relation given in (43) and contains the self-inductances and and the mutual inductance .
- In the mechanical subsystem, is denoted as the inertia of the generator, as the friction with the air and is the input torque to the generator.
- The elements of the transmission line are and ; they denote the resistances and inductances in the coordinates , respectively.
- The supply voltages on the infinite bus are in the coordinates , respectively.
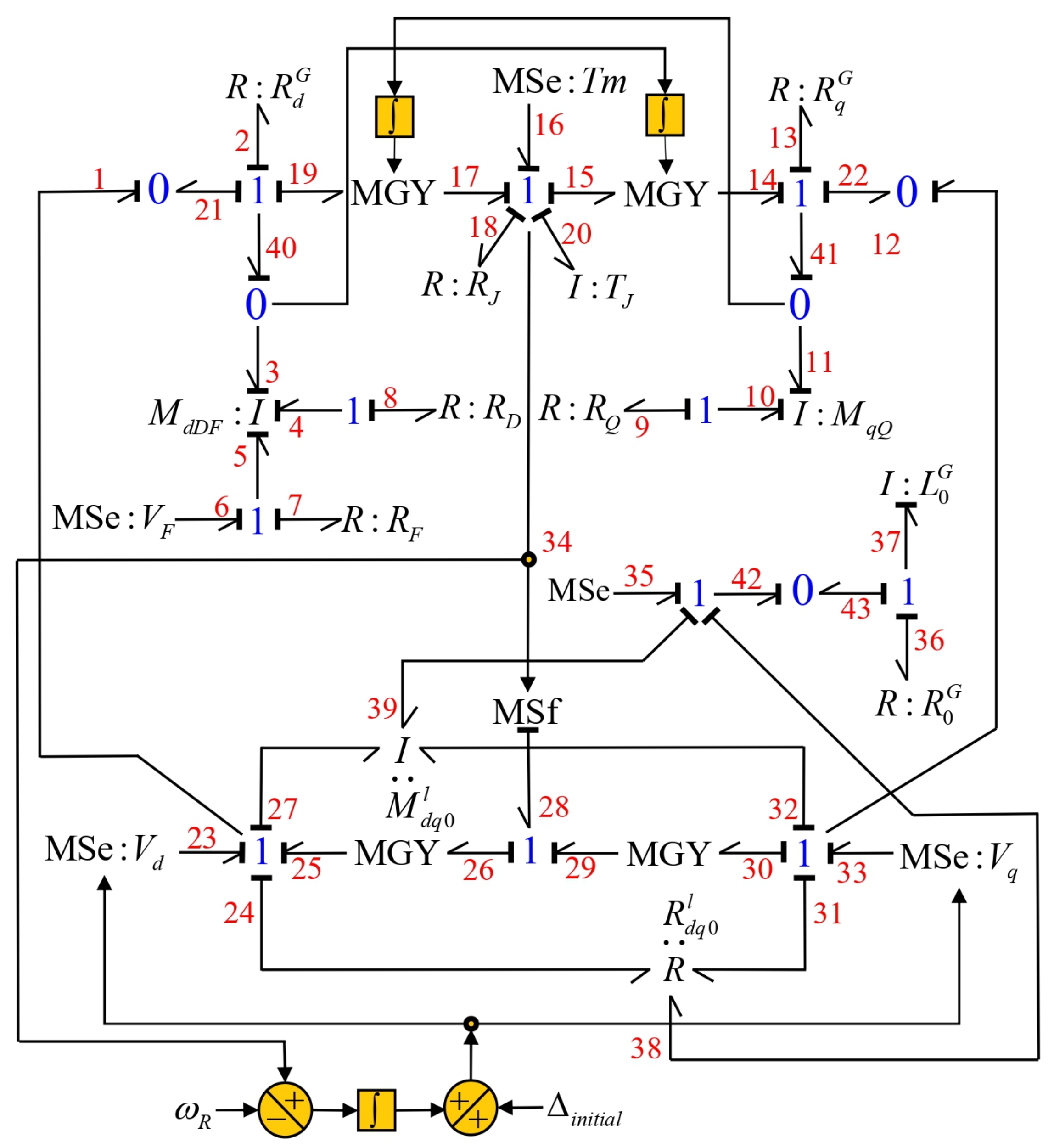
3.2. Case 2: Variable Inductances
3.3. Case 3: Transmission Line with Non-Symmetrical Resistances
3.4. Case 4: Resistances and Inductances of the Non-Symmetrical Transmission Line
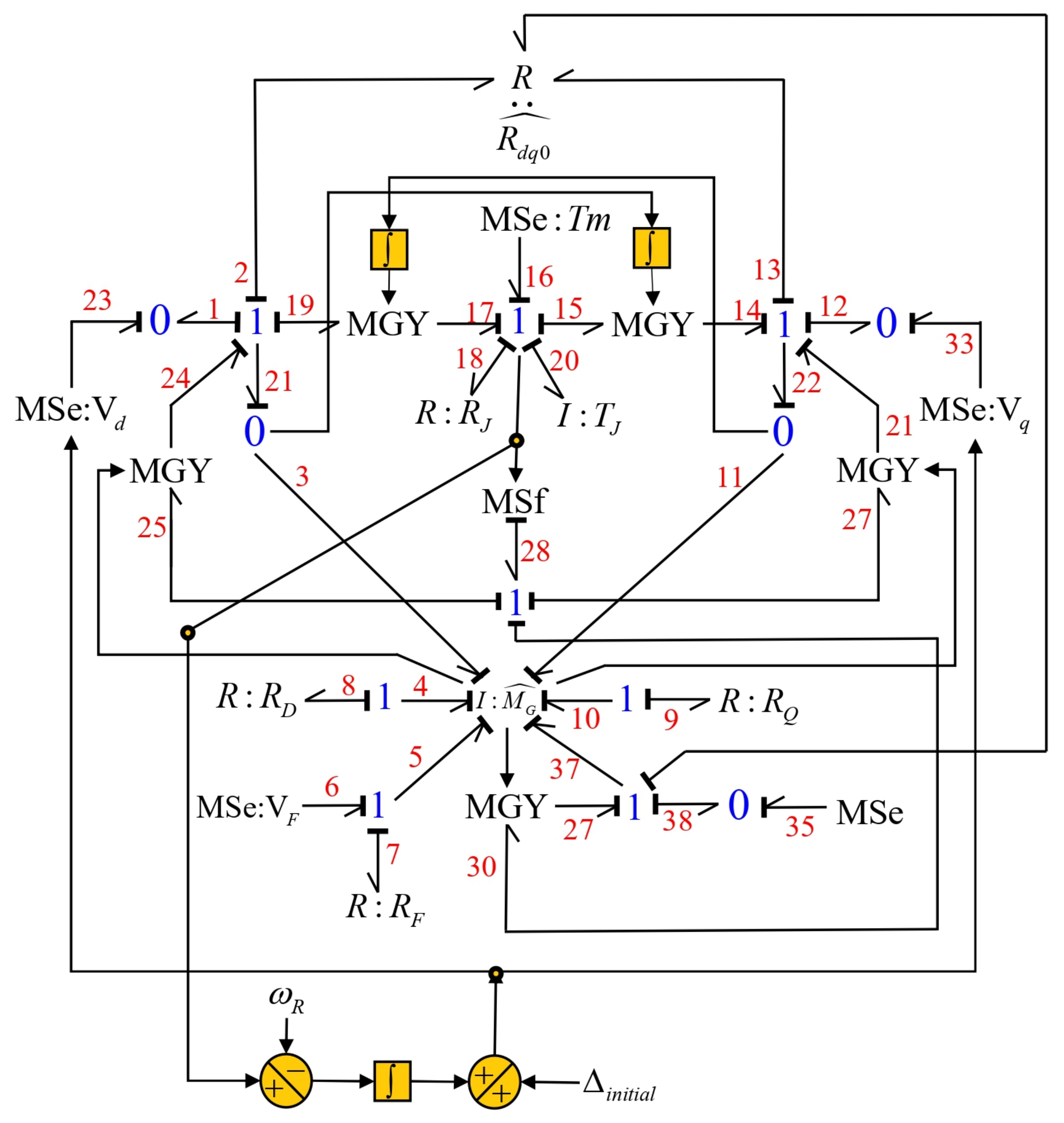
3.5. Novelty of the Proposed Reduction Method
- In the BG area:
- -
- The modeling of an SG connected to a transmission line and the infinite bus, showing how different schemes of the line can be obtained depending on its characteristics (symmetrical or non-symmetrical in resistance and/or inductance) and that independent elements of R or I, or R or I fields can be determined.
- -
- The transmission line is linearly dependent on the SG according to the causality of the storage elements.
- -
- The nonlinear terms of the system are clearly known with the gyrators modulated by state variables.
- In the field of electrical systems:
- -
- The influence of the flow links of the transmission line is known and determines a voltage drop in the R and I elements in each of the d, q and 0 axes.
- -
- The inductances of the transmission line are linearly dependent elements of the SG due to its derivative causality, which allows these inductances to be reduced.
- -
- When the transmission line is not symmetrical, there is a way to represent it with fields in BG, which, in the traditional approach, only determines equations.
- -
- The influence of each coordinate of the SG and the transmission line with the model in BG is known.
- -
- For future work, the elements of the system can be modeled in more detail since in BG, we have each element individually and its implications in the complete system.
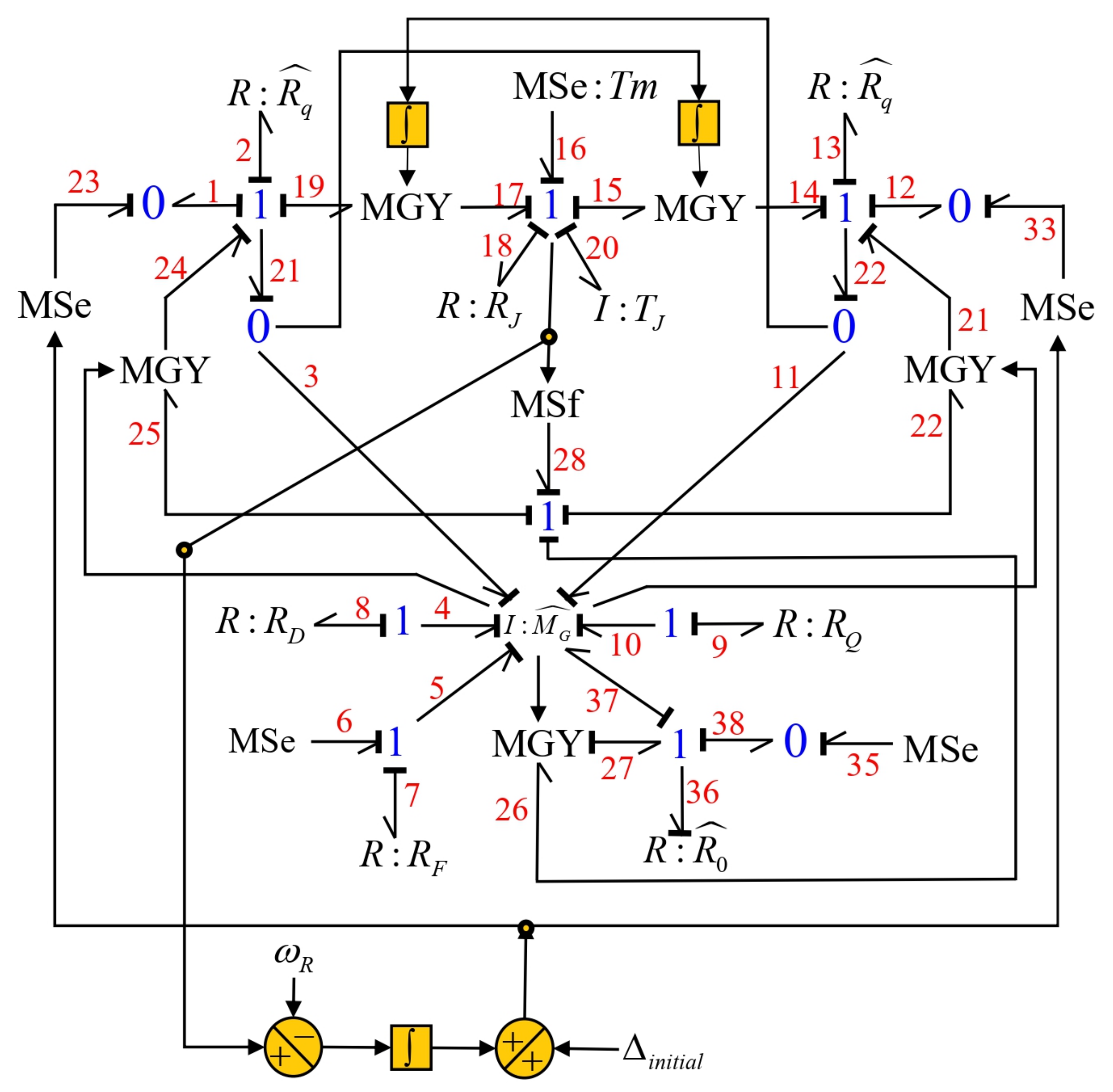
- In the areas of BG and electrical systems: the RBG proposal of the SG that includes the transmission line allows us to show how derivative causality can be included in the elements in integral causality; this causes model reduction and has computational advantages since derivative causality can cause problems in numerical simulation methods. The structure of the SG model in the reduced model with the line is preserved; there are only slight changes and these changes are only reflected in the coordinates of the SG, while the field winding, damping windings and mechanical subsystem do not require any change.
- The BG model of the SG of the system connected to the infinite bus retains the same structure, that is, all its bonds and elements are maintained.
- The values of the resistances and inductances of the SG are the sums of the resistances and inductances of the SG and the transmission line in each axis: d, q and 0.
- For the case of a non-symmetrical transmission line, new causal trajectories are added that are formed in the following way:
- -
- It starts from a modulated flow source whose value is the velocity of the SG and this is obtained from an active bond of 1-junction of the mechanical subsystem.
- -
- The source bond enters a modulated gyrator with a value that is the flux link corresponding to the transmission line gyrator of the complete BG.
- -
- The output bond of the gyrator is connected to 1-junction of the axis that corresponds to it.
- -
- The I-fields of the SG are changed for a single I-field, whose constitutive relationship is defined by the matrix .
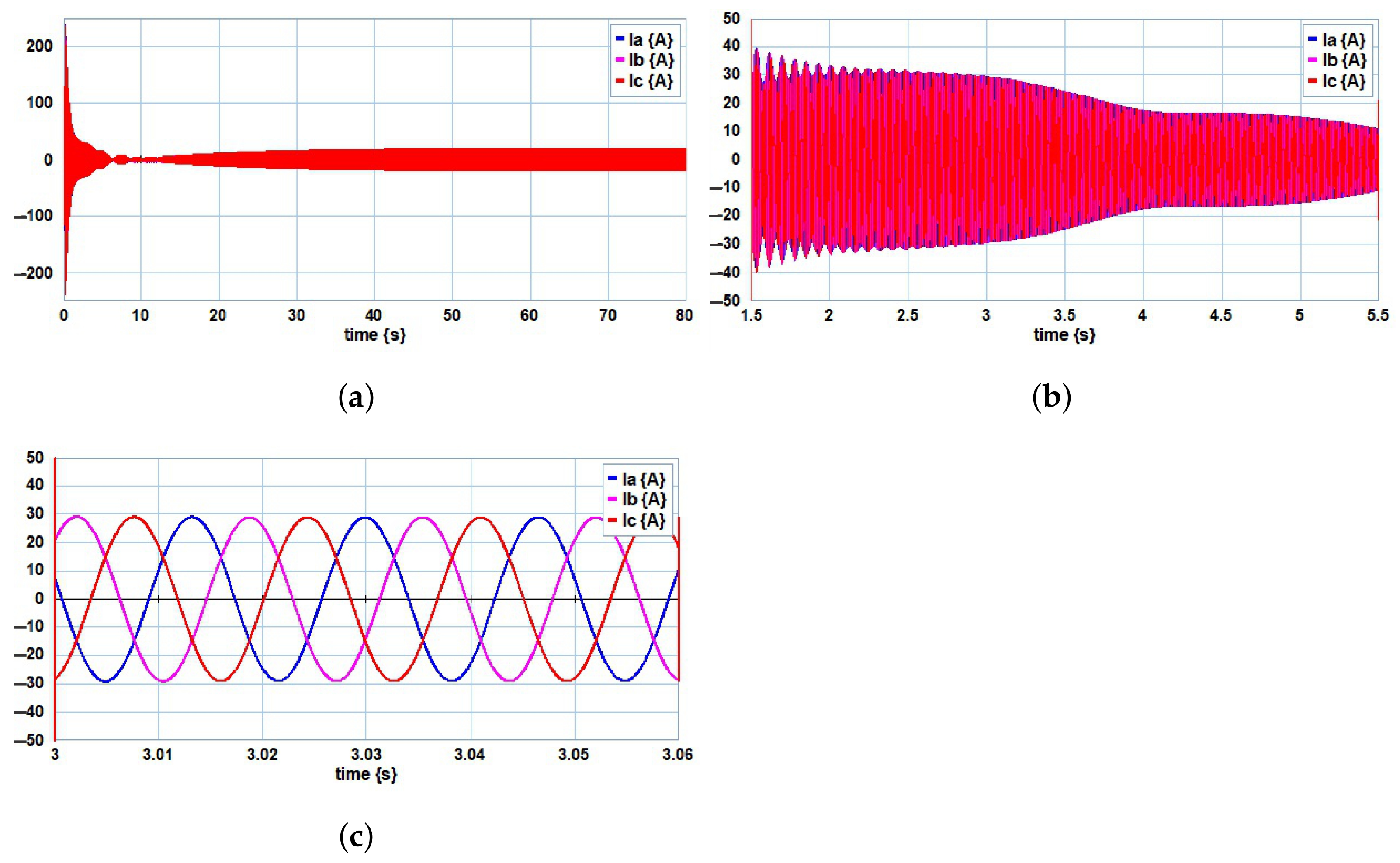
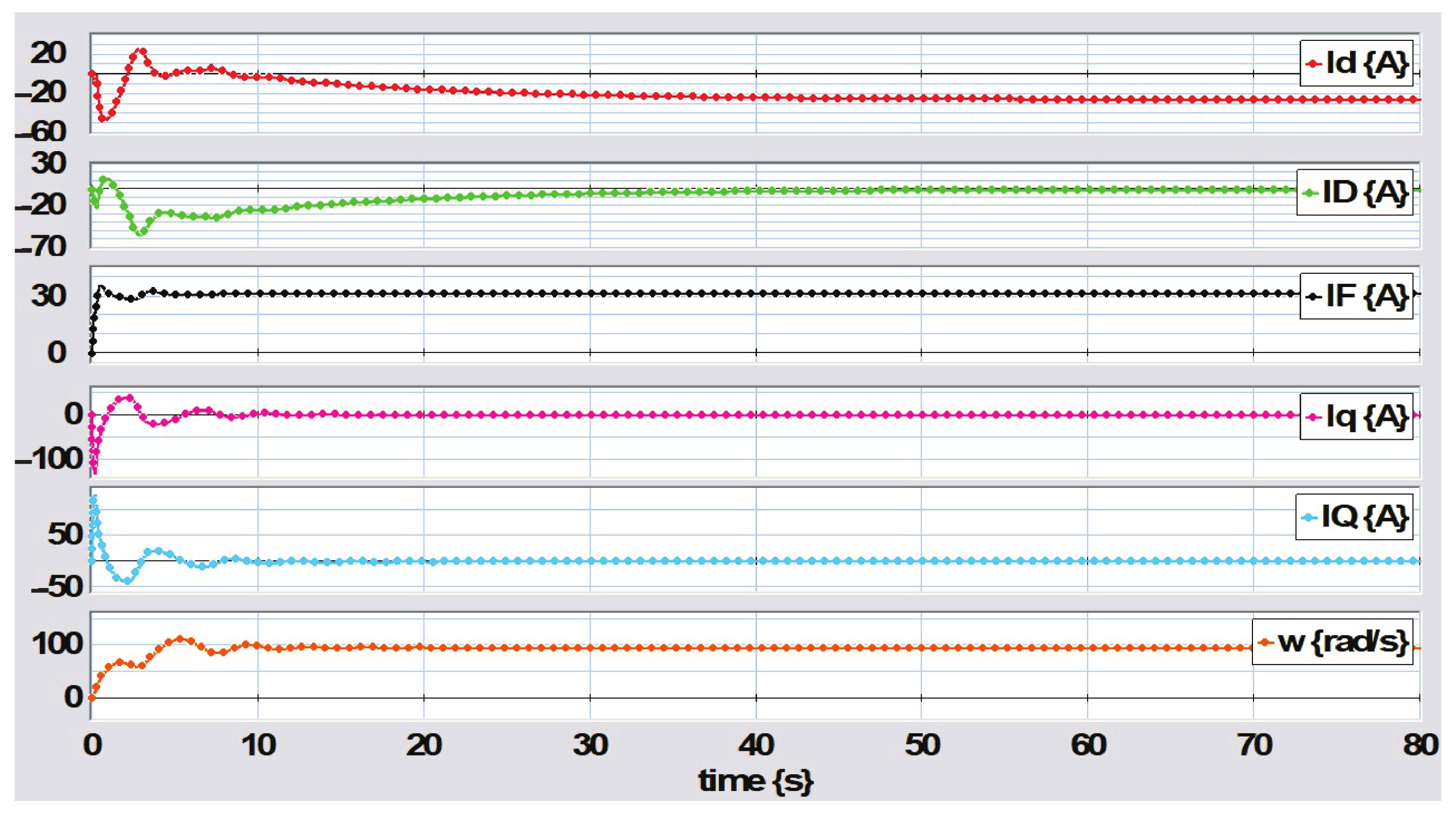
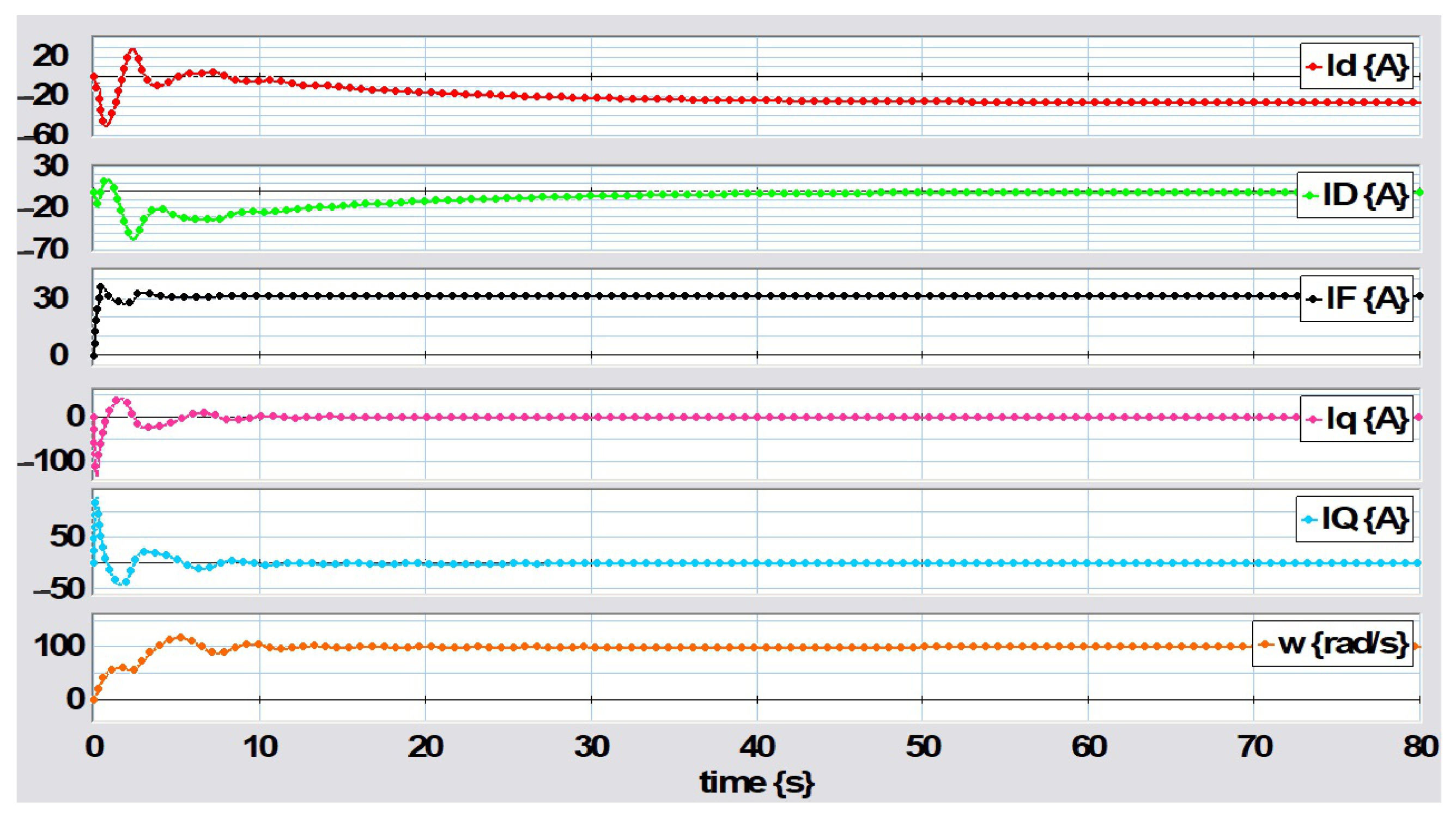
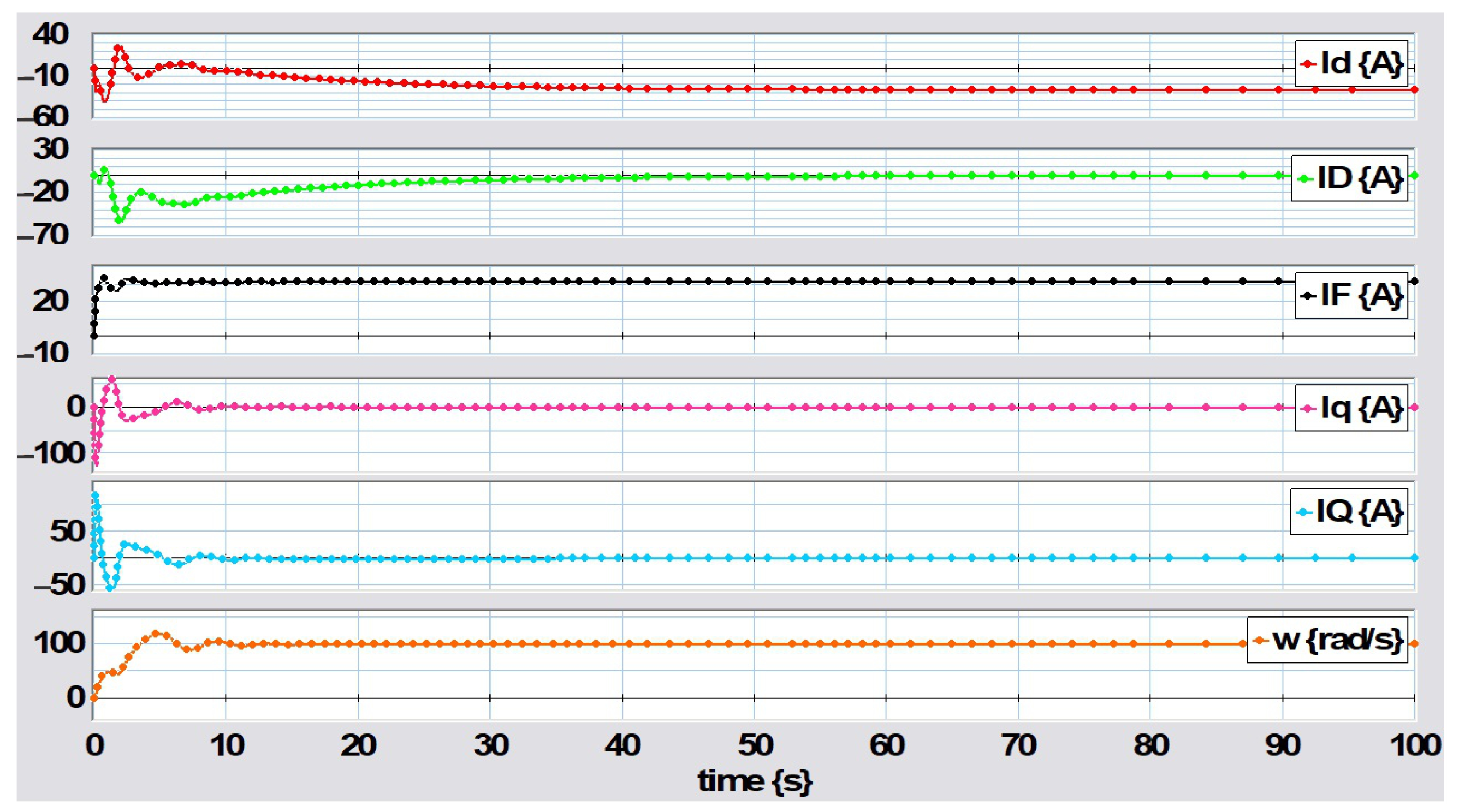
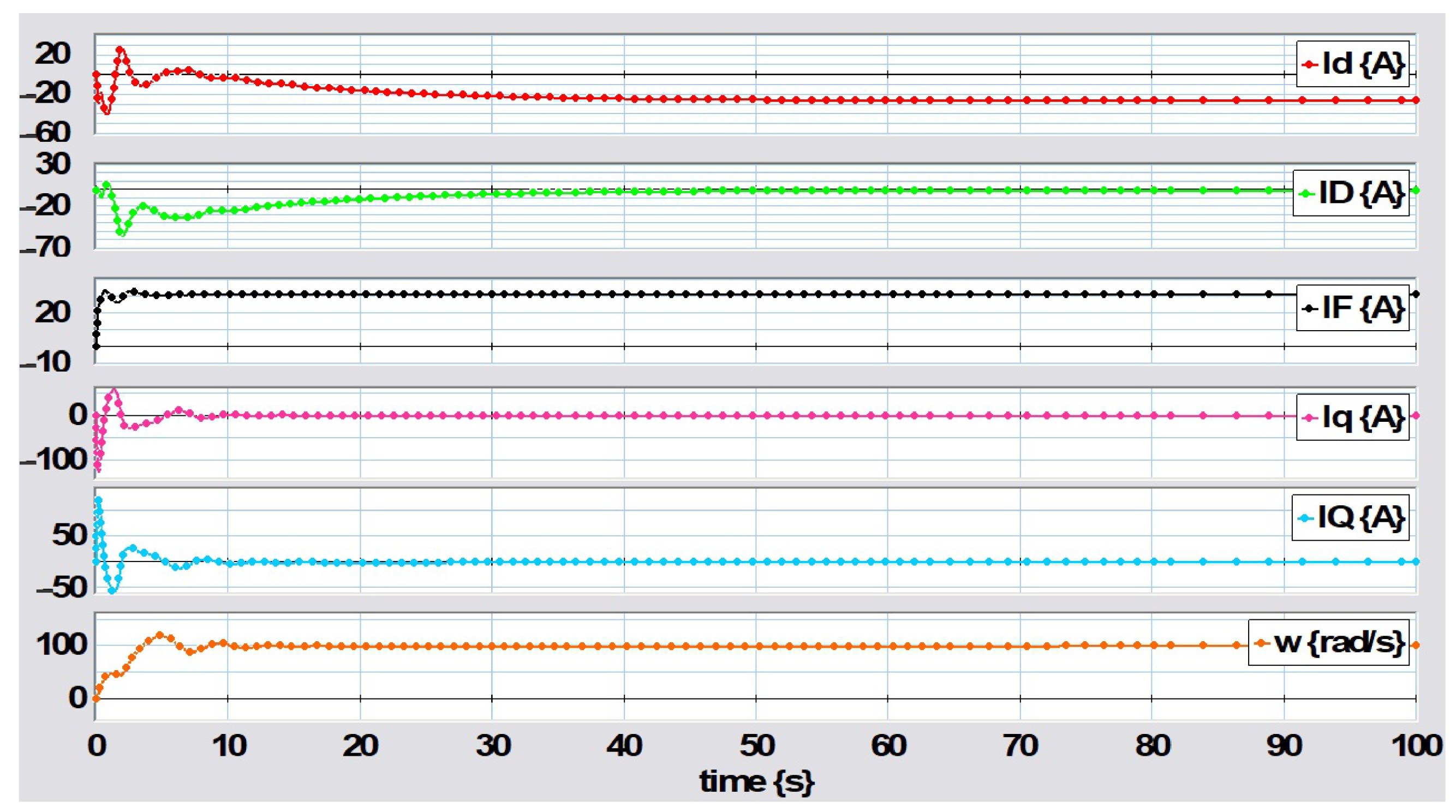
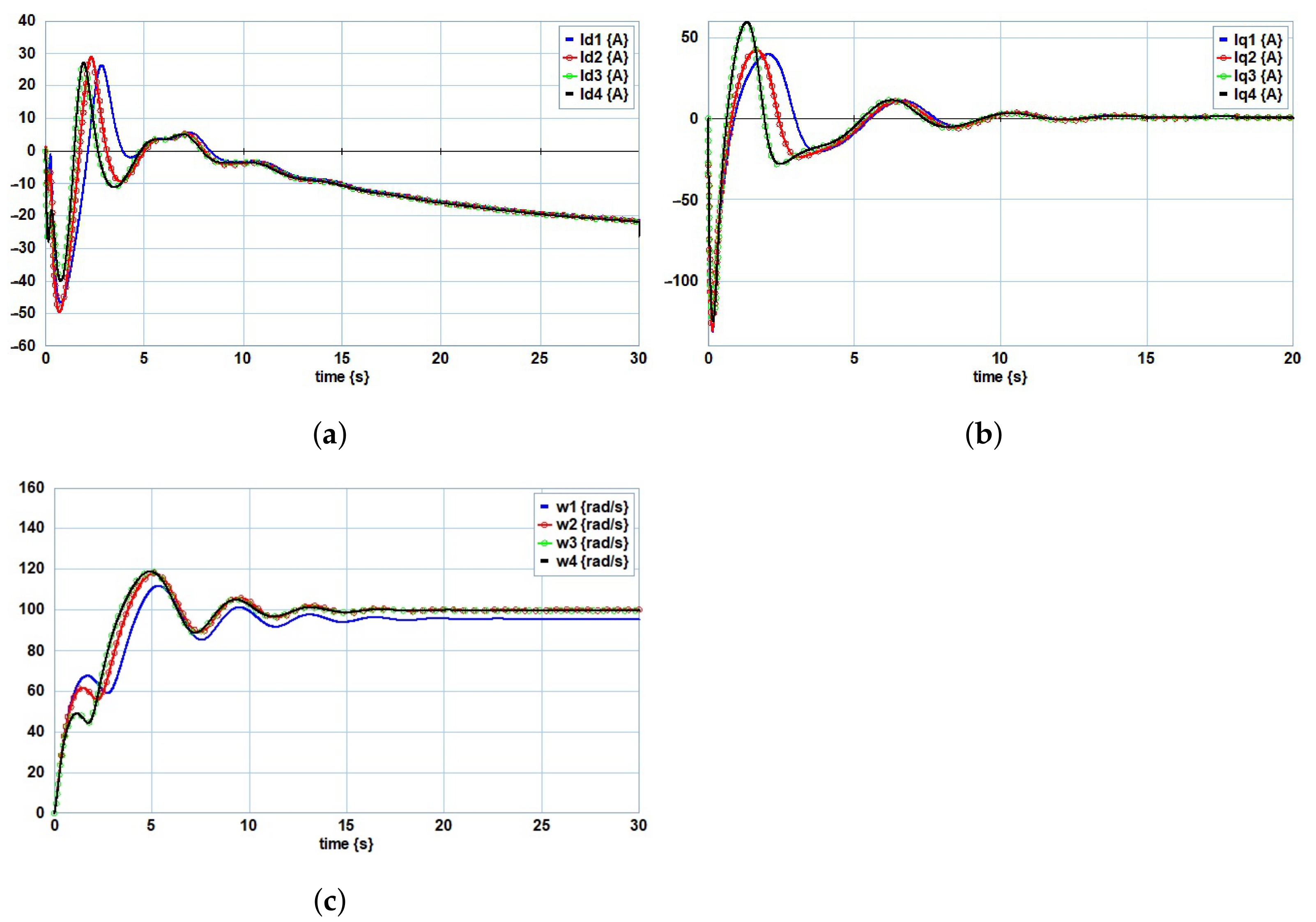
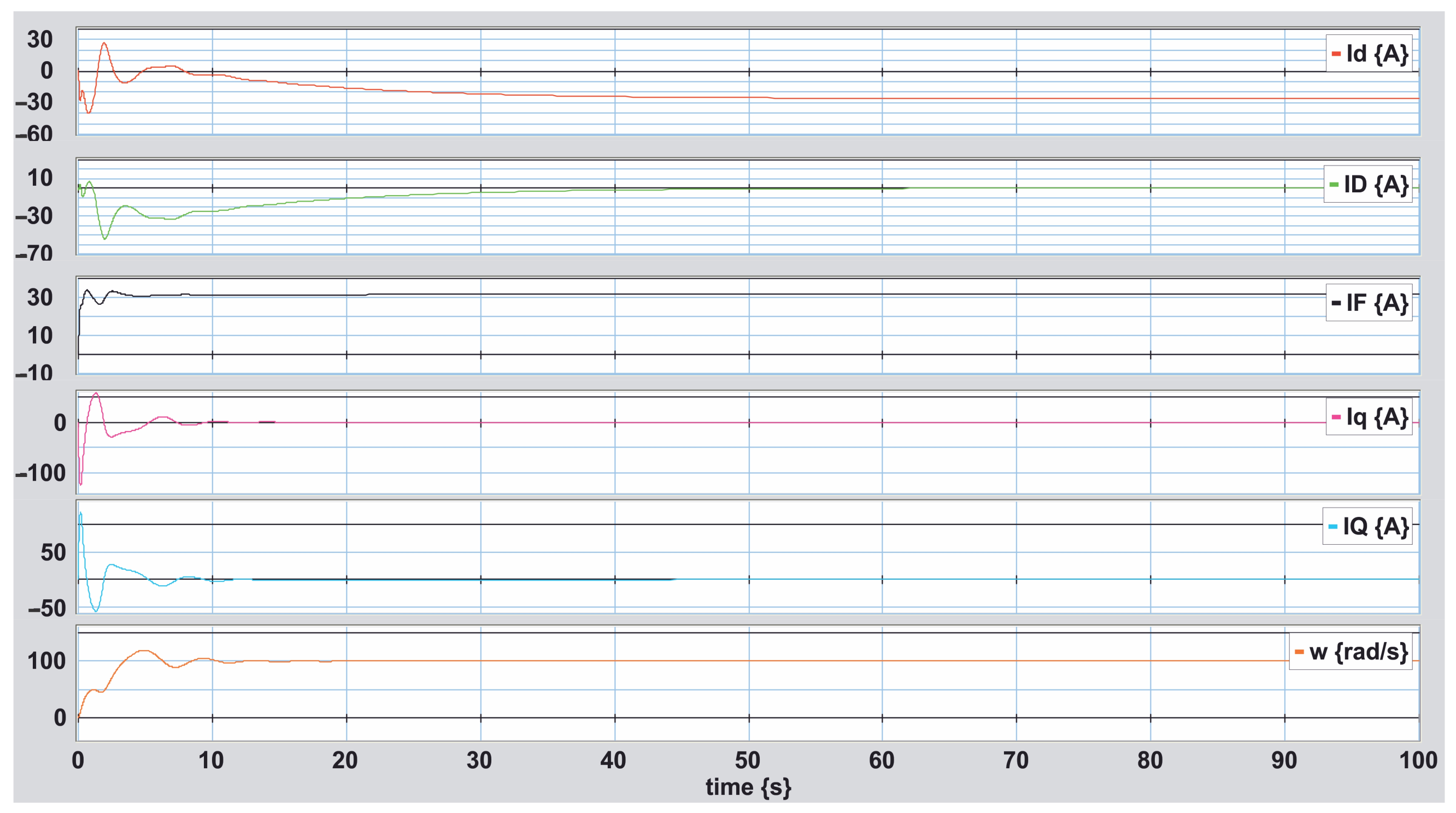
4. Simulation Results
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Anderson, P.M. Power System Control and Stability; The Iowa State University Press: Ames, IA, USA, 1977. [Google Scholar]
- Kundur, J.R. Power System Stability and Control; Mc. Graw-Hill: New York, NY, USA, 1994. [Google Scholar]
- Krause, P.C.; Wasynczuk, O.; Sudhoff, S.D. Analysis of Electrical Machinery and Drive Systems; IEEE Press, Wiley-Interscience: Piscataway, NJ, USA, 2002. [Google Scholar]
- Demiroren, A.; Zeynelgil, H.L. Modelling and simulation of synchronous machine transient analysis using SIMULINK. Int. J. Electr. Eng. Educ. 2002, 39, 337–346. [Google Scholar] [CrossRef]
- Unamuno, E.; Suul, J.A.; Molinas, M.; Barrena, J.A. Comparative Eigenvalue Analysis of Synchronous Machine Emulations and Synchronous Machines. In Proceedings of the IECON 2019-45th Annual Conference of the IEEE Industrial Electronics Society, Lisbon, Portugal, 14–17 October 2019; pp. 3863–3870. [Google Scholar]
- Safar, H. Power Transmission Line Analysis Using Exact, Nominal, and Modified Models. In Proceedings of the 2nd International Conference on Computer and Automation Engineering (ICCAE), Singapore, 26–28 February 2010; pp. 128–134. [Google Scholar]
- Oliveira, L.M.R.; Cardoso, A.J.M. Modelling and Simulation of Three-Phase Power Transformers. In Proceedings of the 6th International Conference on Modelling and Simulation of Electrical Machines, Converters and Systems, (ELECTRIMACS 99), Lisbon, Portugal, 14–16 September 1999; pp. 257–262. [Google Scholar]
- Milanovic, J.V.; Hiskens, I.A. Oscillatory interaction between synchronous generator and local voltage-dependent load. IEE Proc.-Gener. Transm. Distrib. 1995, 142, 473–480. [Google Scholar] [CrossRef]
- Jain, H.; Parchure, A.; Broadwater, R.P.; Dilek, M.; Woyak, J. Three-Phase Dynamic Simulation of Power Systems Using Combined Transmission and Distribution System Models. IEEE Trans. Power Syst. 2016, 31, 4517–4524. [Google Scholar] [CrossRef]
- Lu, S.; Zhu, Y.; Dong, L.; Na, G.; Hao, Y.; Zhang, G.; Zhang, W.; Cheng, S.; Yang, J.; Sui, Y. Small- Signal Stability Research of Grid-Connected Virtual Synchronous Generators. Energies 2022, 15, 7158. [Google Scholar] [CrossRef]
- Chennakesavan, C.; Nalandha, P. Multi-Machine Small Signal Stability Analysis for Large Scale Power System. Indian J. Sci. Technol. 2014, 7, 40–47. [Google Scholar] [CrossRef]
- Obe, E.S. Small Signal Analysis of Load Angle Governing and Excitation Control of AC Generators. Niger. J. Technol. 2005, 24, 19–33. [Google Scholar]
- Bellan, D. Analytical Investigation of the Properties of Transients in Unbalanced Three-Phase Four-Wire Networks. Energies 2022, 15, 9122. [Google Scholar] [CrossRef]
- Qin, X.; Liu, N.; Zhao, L. Study on the Physical Mechanism and the Fast Algorithm of ATC Constrained by Transient Stability for the Point- to- grid Transmission System. In Proceedings of the 2015 IEEE Power & Energy Society General Meeting, Denver, CO, USA, 26–30 July 2015. [Google Scholar]
- Chavez, J.J.; Madrigal, M.; Dinavahi, V. Real-Time Simulation of Three-Phase Transmission Lines Modeled in the Dynamic Harmonic Domain. In Proceedings of the International Conference on Power Systems Transients (IPST 2011), Delf, The Netherlands, 14–17 June 2011. [Google Scholar]
- Xu, H.; Zhang, R.; Li, X.; Yan, Y. Fault Tripping Criteria in Stability Control Device Adapting to Half-Wavelenght AC Transmission Line. IEEE Trans. Power Deliv. 2019, 14, 1619–1625. [Google Scholar] [CrossRef]
- Chaban, A.; Lis, M.; Szafraniec, A.; Levoniuk, V. Mathematical Modelling of Transient Processes in a Three Phase Electric Power System for a Single Phase Short-Circuit. Energies 2022, 15, 1126. [Google Scholar] [CrossRef]
- Elmetwaly, A.H.; ElDesouky, A.A.; Omar, A.I.; Saad, M.A. Operation control, energy management, and power quality enhacement for a cluster of isolated microgrids. Ain Shams Eng. J. 2022, 13, 101737. [Google Scholar] [CrossRef]
- Kermani, M.; Adelmanesh, B.; Shirdare, E.; Sima, C.A.; Carni, D.L.; Martirano, L. Intelligent energy management based on SCADA system in a real Microgrid for smart building applications. Renew. Energy 2021, 171, 1115–1127. [Google Scholar] [CrossRef]
- Subramanian, D.P.; Harinee, K. Small Signal Stability Analysis of Multi-Machine Power Systems Interfaced with Micro Grid. Int. J. Eng. Res. Technol. (IJERT) 2014, 3, 299–306. [Google Scholar]
- Izumi, S.; Karakawa, Y.; Xin, X. Analysis of samll-signal stability of power systems with photovoltaic generators. Electr. Eng. 2019, 101, 321–331. [Google Scholar] [CrossRef]
- Benedetti, L.; Papadopoulos, P.N.; Alvarez, A.E. Small Signal Interactions Involving a Synchronous Machine and a Grid Forming Converter. In Proceedings of the 2021 IEEE Madrid PowerTech, Madrid, Spain, 28 June–2 July 2021. [Google Scholar]
- Firdaus, A.; Anwar, A. Effect of Alternator’s Inertia Constant H on Small Signal Oscillations in Power System. Int. J. Electron. Electr. Eng. 2014, 7, 567–572. [Google Scholar]
- Chu, T.; Xu, M.; Wang, S.; Li, D.; Liu, G. Small-Signal Stability Analysis of the Power System Based on Active Support of REnewable Energy VSCs. Front. Energy Res. 2022, 10, 907790. [Google Scholar] [CrossRef]
- Ding, L.; Liu, X.; Tan, J. Small-Signal Stability Analysis of Low- Inertia Power Grids with Inverter-Based Resources and Synchronous Condensers. In Proceedings of the IEEE PES Innovative Smart Grid Technologies Conference (ISGT NA), New Orleans, LA, USA, 21–24 February 2022. [Google Scholar]
- Shivam, G.; Kumar, T.D. Modelling and Simulation of 3-Phase Grid connected Solar PV System with Power Quality Analysis. Res. Quantum Comput. Phys. Syst. 2018, 1, 1–5. [Google Scholar]
- Mayoral, E.H.; Reyes, E.D.; Cortez, R.I.; Mercado, E.C.; Garcia, V.T.; Gosebruch, R.U. Modeling and Validation of the Switching Techniques Applied to Back-to-Back Power Converter Connected to a DFIG-Based Wind Turbine for Harmonic Analysis. Electronics 2021, 10, 3046. [Google Scholar] [CrossRef]
- Costa, I.D.L.; Brandao, D.I.; Junior, L.M.; Simoes, M.G.; Morais, L.M.F. Analysis of Stationary- and Synchronous- Reference Frames for Three-Phase Three-Wire Grid-Connected Converter AC Current Regulators. Energies 2021, 14, 8348. [Google Scholar] [CrossRef]
- Karnopp, D.C.; Rosenberg, R.C. Systems Dynamics: A Unified Apprach; Wiley John & Sons: Hoboken, NJ, USA, 2000. [Google Scholar]
- Gawthrop, P.; Smith, L. Metamodelling; Prentice-Hall: Hoboken, NJ, USA, 1989. [Google Scholar]
- Brown, F.T. Engineering System Dynamics; Dekker: New York, NY, USA, 1989. [Google Scholar]
- Dauphin-Tanguy, G. Les Bond Graphs; Hermes Science Europe: London, UK, 2000. [Google Scholar]
- Thoma, J.; Bouamama, B.O. Modelling and Simulation in Thermal and Chemical Engineering a Bond Graph Approach; Springer: Berlin/Heidelberg, Germany, 2000. [Google Scholar]
- Dauphin-Tanguy, G.; Rahmani, A.; Sueur, C. Bond graph aided design of controlled systems. Simul. Pract. Theory 1999, 7, 493–513. [Google Scholar] [CrossRef]
- Brown, F.T. Hamiltonian and Lagrangian Bond Graphs. J. Frankl. Inst. 1991, 328, 809–831. [Google Scholar] [CrossRef]
- Xu, J.; Yan, H.; Liu, S.; Zhang, Y.; Tan, W. Bond Graph-Based Approach to Modeling Variable-Speed Gearboxes with Multi-Type Clutches. Appl. Sci. 2022, 12, 6181. [Google Scholar] [CrossRef]
- Phillips, J.R.; Amirouche, F. Bond-graph Representation of Ideal Constraints via the Principle of Virtual Power. ECCOMAS Thematic. In Proceedings of the Conference on Multibody Dynamics, Lisbon, Portugal, 24–28 June 2023. [Google Scholar]
- Zrafi, R.; Ghedira, S.; Besbes, K. A Bond Graph Approach for the Modeling and Simulation of a Buck Conerter. J. Low Power Electron. Appl. 2018, 8, 2. [Google Scholar] [CrossRef]
- Mahmoudi, A.; Roshandel, E.; Kahourzade, S.; Vakilipoor, F.; Drake, S. Bond graph model of line-start permanent-magnet synchronous motors. Electr. Eng. 2024, 106, 1667–1681. [Google Scholar] [CrossRef]
- Badoud, A.E.; Merahi, F.; Bouamama, B.O.; Mekhilef, S. Bond Graph modeling, design and experimental validation of a photovoltaic/ fuel cell/ electrolyzer/ battery hybrid power system. Int. J. Hydrogen Energy 2021, 46, 24011–24027. [Google Scholar] [CrossRef]
- Vali, S.H.; Kiranmayi, R. Design of Zero Voltage Switching Boost DC-DC Converter Using Bond Graph Model. EMITTER Int. Eng. Technol. 2020, 8, 426–441. [Google Scholar] [CrossRef]
- Mohammed, A.; Sirahbizu, B.; Lemu, H.G. Optimal Rotary Wind Turbine Blade Modeling with Bond Graph Approach for Specific Local Sites. Energies 2022, 15, 6858. [Google Scholar] [CrossRef]
- Fang, Z.; Wang, J.; Xiong, F.; Xie, X. Research on the dynamic characteristics of the acquisittion mechanism of the oscillating flapping wing wave energy power generation device based on the bond graph. J. Phys. 2021, 2125, 012050. [Google Scholar]
- Sahm, D. A two-axis bond graph model of the dynamics of synchronous electrical machine. J. Frankl. Inst. 1979, 308, 205–218. [Google Scholar] [CrossRef]
- Hernandez, I.N.; Breeveld, P.C.; Weustink, P.B.T.; Gonzalez, G. A phasor analysis of a synchronous generator: A bond graph approach. Int. J. Electr. Comput. Electron. Commun. Eng. 2014, 8, 1086–1092. [Google Scholar]
- Gonzalez, G.; Barrera, N.; Ayala, G.; Padilla, J.A.; Alvarado, D. Dynamic performance of a Skystream wind turbine: A bond Graph approach. Cogent Eng. 2019, 6, 1709361. [Google Scholar] [CrossRef]
- Gonzalez, G.; Ayala, G.; Barrera, N.; Padilla, J.A. Linearization of a class of non-linear systems modelled by multibond graphs. Math. Comput. Model. Dyn. Syst. 2019, 25, 284–332. [Google Scholar] [CrossRef]
- Gonzalez, G.; Barrera, N.; Ayala, G.; Padilla, J.A. Modeling and Simulation in Multibond Graphs Applied to Three-Phase Electrical Systems. Appl. Sci. 2023, 13, 5880. [Google Scholar] [CrossRef]
- Kadiman, S.; Yuliani, O. Comparison performance study of singly-fed and doubly-fed induction generators-based bond graph wind turbines model. Int. J. Electr. Comput. (IJECE) 2024, 14, 3592–3606. [Google Scholar] [CrossRef]
- Boum, A.T.; Tatchou, D.G. Modeling, Simulation and Fault Diagnosis of a Doubly Fed Induction Generator using Bond Graph. Int. J. Control. Syst. Robot. 2020, 5, 34–40. [Google Scholar]
- Hamza, W.; Jamel, B.S.; Najeh, L.M. Application of Bond Graph of Renewable Energy Sources in Smart Grids. J. Electr. Electron. Eng. 2020, 13, 97–102. [Google Scholar]
- Mezghani, D.; Mami, A.; Dauphin-Tanguy, G. Bond graph modelling and control enhacement of an off-grid hybrid pumping system by frequency optimization. Int. J. Numer. Model. Electron. Netw. Devices Fields 2020, 33, e2717. [Google Scholar] [CrossRef]
- Lenz, R.; D-Olek, A.; Kugi, A.; Kemmetmuller, W. Optimal fault-tolerant control with radial force compensation for multiple open-circuit faults in multiphase PMSMs - A comparison of n-phase and multiple three-phase systems. Control Eng. Pract. 2024, 147, 105924. [Google Scholar] [CrossRef]
- Musca, R.; Longatt, F.G.; Sanchez, C.G. Power System Oscillations with Different Prevalence of Grid-Following and Grid-Forming Converters. Energies 2022, 15, 4273. [Google Scholar] [CrossRef]
- Smadi, I.A.; Ibrahim, I.E.A.A.A. An Improved Delayed Signal Cancelation for Three-Phase Grid Synchronization with DC Offset Immunity. Energies 2023, 16, 2873. [Google Scholar] [CrossRef]
- Jayarajan, R.; Fernando, N.; Mahmoudi, A.; Ullah, N. Magnetic Equivalent Circuit Modelling of Synchronous Reluctance Motors. Energies 2022, 15, 4122. [Google Scholar] [CrossRef]
- Hong, J.-S.; Lee, H.-K.; Nah, J.; Kim, K.-H.; Shin, K.-H.; Choi, J.-Y. Semi-3D Analysis of a Permanent Magnet Synchronous Generator Considering Bolting and Overhang Structure. Energies 2022, 15, 4374. [Google Scholar] [CrossRef]
- Xu, Z. Three Technical Challenges Faced by Power Systems in Transition. Energies 2022, 15, 4473. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| V | H | H | |
| V | H | H | |
| V | H | H | |
| V | H | H | |
| N· m | N· m· s | H | N· m· s2 |
| w (rad/s) | ||||||
|---|---|---|---|---|---|---|
| Case 1 | ||||||
| Case 2 | ||||||
| Case 3 | ||||||
| Case 4 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gonzalez-Avalos, G.; Ayala-Jaimes, G.; Gallegos, N.B.; Garcia, A.P. Modeling and Simulation of an Integrated Synchronous Generator Connected to an Infinite Bus through a Transmission Line in Bond Graph. Symmetry 2024, 16, 1335. https://doi.org/10.3390/sym16101335
Gonzalez-Avalos G, Ayala-Jaimes G, Gallegos NB, Garcia AP. Modeling and Simulation of an Integrated Synchronous Generator Connected to an Infinite Bus through a Transmission Line in Bond Graph. Symmetry. 2024; 16(10):1335. https://doi.org/10.3390/sym16101335
Chicago/Turabian StyleGonzalez-Avalos, Gilberto, Gerardo Ayala-Jaimes, Noe Barrera Gallegos, and Aaron Padilla Garcia. 2024. "Modeling and Simulation of an Integrated Synchronous Generator Connected to an Infinite Bus through a Transmission Line in Bond Graph" Symmetry 16, no. 10: 1335. https://doi.org/10.3390/sym16101335
APA StyleGonzalez-Avalos, G., Ayala-Jaimes, G., Gallegos, N. B., & Garcia, A. P. (2024). Modeling and Simulation of an Integrated Synchronous Generator Connected to an Infinite Bus through a Transmission Line in Bond Graph. Symmetry, 16(10), 1335. https://doi.org/10.3390/sym16101335