

Gain-Scheduled Energy-to-Peak Approach for Vehicle Sideslip Angle Filtering

 , ,
, ,  , , and
, , and
Abstract
1. Introduction
- The sideslip angle filtering problem is solved using a novel approach.
- New results for energy-to-peak optimization of LPV systems are provided, focusing on low frequencies.
- These results include new stability conditions for LPV systems in low frequencies.
2. Problem Statement and Preliminaries
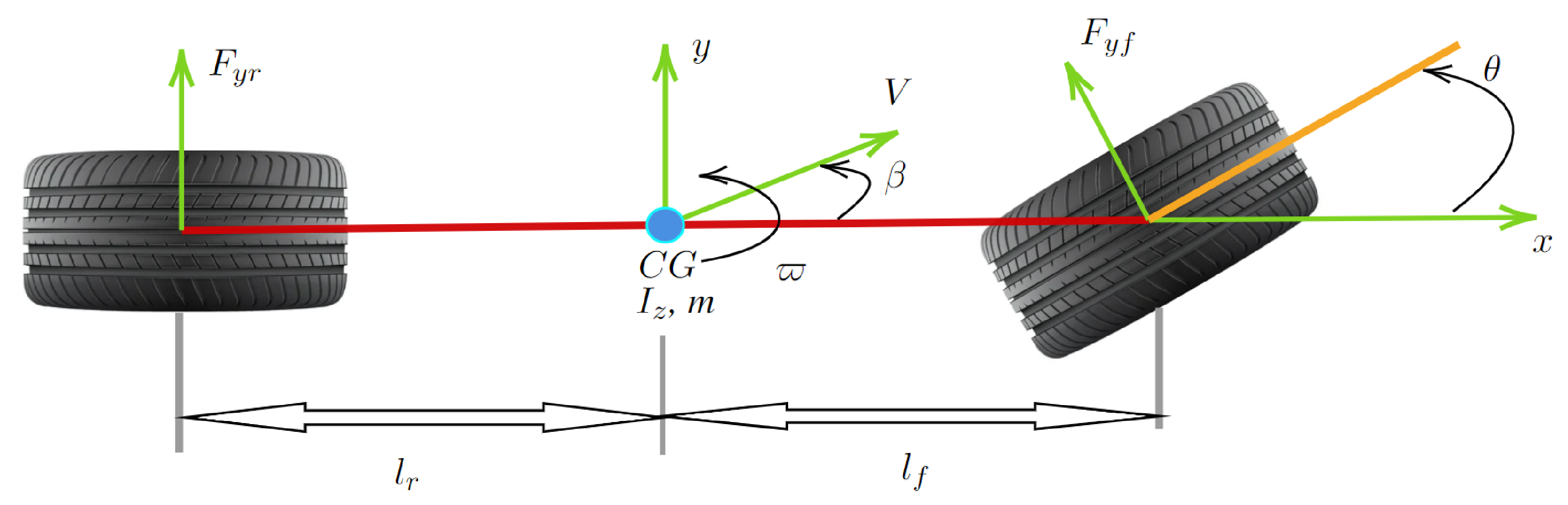
2.1. Lateral Dynamics Model
- The lateral dynamics of the vehicle correspond to the two-degree-of-freedom system presented in Figure 1.
- The two-degree-of-freedom lateral dynamics can be represented by the LPV model in Equation (2).
- The tire cornering stiffness may be represented by the model in Equation (1), with uncertain parameters.
2.2. Objectives of the Filter
- The augmented filtering system (7) is asymptotically stable when = 0.
2.3. Preliminaries
- 1.
- < 0, , .
- 2.
- < 0.
- 3.
- : < 0.
- 4.
- : < 0.
3. The Strategy of the FF LPV Filtering
3.1. Analysis Conditions for a FF LPV Filtering
- ∇ = ,
- Σ = ,
- = ,
- = ,
- = , = .
3.2. LPV Filter Synthesis Conditions
- ; ;
- ; ;
- ; ;
- ;
- ; ;
- ; ;
- ;
- ;
- ;
- ;
- ; ;
- ;
- ;
- ;
- ; ;
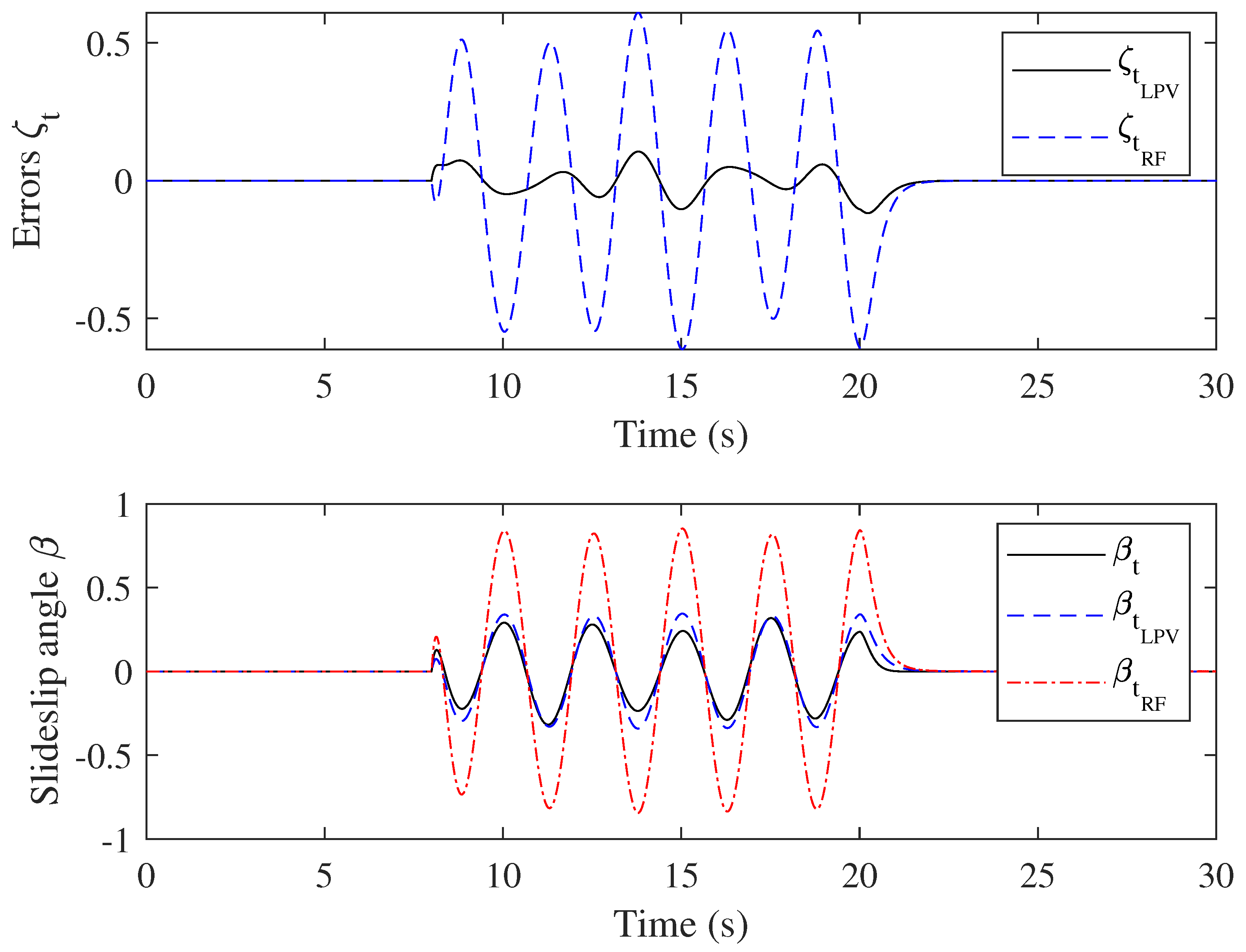
- A robust filter focuses on maintaining the performance despite system uncertainties and model inaccuracies, handling worst-case disturbances.
- A gain-scheduled filter dynamically adjusts its gain parameters based on the system’s operating conditions, making it effective for systems with predictable changes in dynamics.
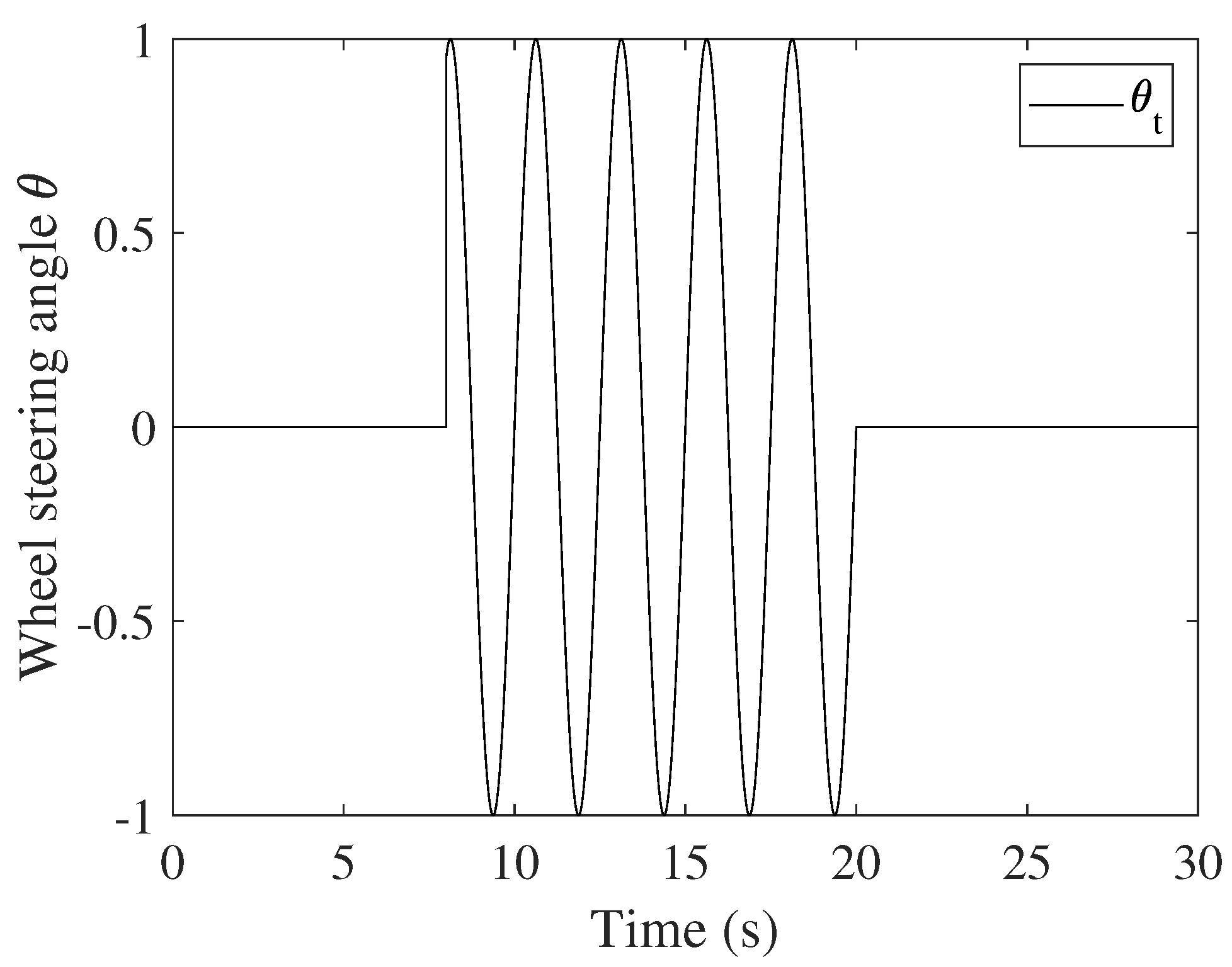
4. Simulation Examples
- ;
- ;
- .
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| GSF | Gain-scheduled filter |
| RF | Robust filter |
| LPV | Linear parameter-varying |
| FF | Finite frequency |
| EF | Entire frequency |
| E2P | Energy-to-peak |
References
- Lenzo, B.; Zanchetta, M.; Sorniotti, A.; Gruber, P.; De Nijs, W. Yaw rate and sideslip angle control through single input single output direct yaw moment control. IEEE Trans. Control. Syst. Technol. 2020, 29, 124–139. [Google Scholar] [CrossRef]
- Zheng, B.; Anwar, S. Yaw stability control of a steer-by-wire equipped vehicle via active front wheel steering. Mechatronics 2009, 19, 799–804. [Google Scholar] [CrossRef]
- Zhang, H.; Wang, R.; Wang, J. Sideslip angle estimation of an electric ground vehicle via finite-frequency H∞ approach. In Robust Gain-Scheduled Estimation and Control of Electrified Vehicles via LPV Technique; Springer: Berlin/Heidelberg, Germany, 2023; pp. 75–95. [Google Scholar]
- Liu, C.; Yao, J. Sideslip Angle Estimation for Lateral Vehicle Control with Delayed Output Measurements. In Proceedings of the 2022 International Conference on Advanced Robotics and Mechatronics (ICARM), Guilin, China, 9–11 July 2022; IEEE: Piscataway, NJ, USA, 2022; pp. 866–869. [Google Scholar]
- Zhang, H.; Zhang, G.; Wang, J. Sideslip Angle Estimation of an Electric Ground Vehicle via Finite-Frequency H∞ Approach. IEEE Trans. Transp. Electrif. 2015, 2, 200–209. [Google Scholar] [CrossRef]
- Chang, X.H.; Liu, Y. Robust H∞ Filtering for Vehicle Sideslip Angle With Quantization and Data Dropouts. IEEE Trans. Veh. Technol. 2020, 69, 10435–10445. [Google Scholar] [CrossRef]
- Hellani, D.E.; Hajjaji, A.E.; Ceschi, R.; Aitouche, A. Sideslip Angle Estimation of Ground Vehicles in a Finite Frequency Domain Through H∞ Approach. In Proceedings of the 2018 26th Mediterranean Conference on Control and Automation (MED), Zadar, Croatia, 19–22 June 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 1–9. [Google Scholar]
- El Hellani, D.; El Hajjaji, A.; Ceschi, R. Finite frequency H∞ filter design for TS fuzzy systems: New approach. Signal Process. 2018, 143, 191–199. [Google Scholar] [CrossRef]
- Iwasaki, T.; Hara, S. Generalized KYP Lemma: Unified frequency domain inequalities with design applications. IEEE Trans. Autom. Control 2005, 50, 41–59. [Google Scholar] [CrossRef]
- Frezzatto, L.; Oliveira, R.C.; Peres, P.L. L2-gain filter design for continuous-time LPV systems in finite frequency domain. IFAC-PapersOnLine 2018, 51, 161–166. [Google Scholar] [CrossRef]
- Gao, H.; Li, X. Robust Filtering for Uncertain Systems; Springer: Berlin/Heidelberg, Germany, 2016. [Google Scholar]
- Zhang, H.; Mehr, A.S.; Shi, Y. Improved robust energy-to-peak filtering for uncertain linear systems. Signal Process. 2010, 90, 2667–2675. [Google Scholar] [CrossRef]
- Wilson, D.A. Convolution and Hankel operator norms for linear systems. IEEE Trans. Autom. Control 1989, 34, 94–97. [Google Scholar] [CrossRef]
- Gyurkovics, É.; Takács, T. Robust energy-to-peak filter design for a class of unstable polytopic systems with a macroeconomic application. Appl. Math. Comput. 2021, 420, 126729. [Google Scholar] [CrossRef]
- Zhang, H.; Wang, J. Robust gain-scheduling control of vehicle lateral dynamics through AFS/DYC. In Modeling, Dynamics and Control of Electrified Vehicles; Elsevier: Amsterdam, The Netherlands, 2018; pp. 339–368. [Google Scholar]
- Liao, S. Robust H∞ filtering and time-varying delay compensation for car suspension systems: A comprehensive approach to reduced disturbance and enhanced estimation. Multiscale Multidiscip. Model. Exp. Des. 2024, 7, 2343–2357. [Google Scholar] [CrossRef]
- Zhang, H.; Huang, X.; Wang, J.; Karimi, H.R. Robust energy-to-peak sideslip angle estimation with applications to ground vehicles. Mechatronics 2015, 30, 338–347. [Google Scholar] [CrossRef]
- Cao, X.; Xu, T.; Tian, Y.; Ji, X. Gain-scheduling LPV synthesis H∞ robust lateral motion control for path following of autonomous vehicle via coordination of steering and braking. Veh. Syst. Dyn. 2023, 61, 968–991. [Google Scholar] [CrossRef]
- Aslam, M.S.; Bilal, H.; Anjum, Z. Gain-scheduled filter design with different time delays for TS fuzzy systems. Trans. Inst. Meas. Control 2024, 01423312241274009. [Google Scholar] [CrossRef]
- Li, X.J.; Yang, G.H. Finite Frequency L2 − L∞ Filtering of TS Fuzzy Systems With Unknown Membership Functions. IEEE Trans. Syst. Man Cybern. Syst. 2016, 47, 1884–1897. [Google Scholar] [CrossRef]
- Todorov, M.G. A New Approach to the Energy-to-Peak Performance Analysis of Continuous-Time Markov Jump Linear Systems. IEEE Control Syst. Lett. 2024, 8, 1024–1029. [Google Scholar] [CrossRef]
- Yu, H.; Hu, J.; Song, B.; Liu, H.; Yi, X. Resilient energy-to-peak filtering for linear parameter-varying systems under random access protocol. Int. J. Syst. Sci. 2022, 53, 2421–2436. [Google Scholar] [CrossRef]
- van Waarde, H.J.; Camlibel, M.K. A matrix Finsler’s lemma with applications to data-driven control. In Proceedings of the 2021 60th IEEE Conference on Decision and Control (CDC), Austin, TX, USA, 13–17 December 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 5777–5782. [Google Scholar]
- Hu, J.; Chen, W.; Wu, Z.; Chen, D.; Yi, X. Design of protocol-based finite-time memory fault detection scheme with circuit system application. IEEE Trans. Syst. Man Cybern. Syst. 2024, 54, 3110–3123. [Google Scholar] [CrossRef]
- Lozia, Z. Vehicle dynamics and motion simulation versus experiment. SAE Trans. 1998, 107, 344–360. [Google Scholar]
- Kutluay, E.; Winner, H. Validation of vehicle dynamics simulation models—A review. Veh. Syst. Dyn. 2014, 52, 186–200. [Google Scholar] [CrossRef]
- Kim, J. Effect of vehicle model on the estimation of lateral vehicle dynamics. Int. J. Automot. Technol. 2010, 11, 331–337. [Google Scholar] [CrossRef]
- Das, S.; Shrudhanidhi. Vehicle Dynamics Modelling: Lateral and Longitudinal. In Proceedings of the 2021 8th International Conference on Signal Processing and Integrated Networks (SPIN), Noida, India, 26–27 August 2021; pp. 407–412. [Google Scholar] [CrossRef]
- Geromel, J.C.; Colaneri, P. Robust stability of time varying polytopic systems. Syst. Contro. Lett. 2006, 55, 81–85. [Google Scholar] [CrossRef]
- Iwasaki, T.; Hara, S.; Fradkov, A.L. Time domain interpretations of frequency domain inequalities on (semi) finite ranges. Syst. Control Lett. 2005, 54, 681–691. [Google Scholar] [CrossRef]
- de Oliveira, M.C.; Skelton, R.E. Stability tests for constrained linear systems. In Perspectives in Robust Control; Springer: Berlin/Heidelberg, Germany, 2001; pp. 241–257. [Google Scholar]
- Khargonekar, P.P.; Petersen, I.R.; Zhou, K. Robust stabilization of uncertain linear systems: Quadratic stabilizability and H∞ control theory. IEEE Trans. Autom. Control 1990, 35, 356–361. [Google Scholar] [CrossRef]
- Zoulagh, T.; El Haiek, B.; Hmamed, A.; El Hajjaji, A. Homogenous polynomial H∞ filtering for uncertain discrete-time systems: A descriptor approach. Int. J. Adapt. Control Signal Process. 2018, 32, 378–389. [Google Scholar] [CrossRef]
- El Haiek, B.; Zoulagh, T.; Hmamed, A.; El Adel, E.M. Polynomial static output feedback H∞ control for continuous-time linear systems via descriptor approach. Int. J. Innov. Comput. Inf. Control 2017, 13, 941–952. [Google Scholar]
- Lofberg, J. YALMIP: A toolbox for modeling and optimization in MATLAB. In Proceedings of the 2004 IEEE international conference on robotics and automation (IEEE Cat. No. 04CH37508), New Orleans, LA, USA, 26 April–1 May 2004; IEEE: Piscataway, NJ, USA, 2004; pp. 284–289. [Google Scholar]
- Sturm, J.F. Using SeDuMi 1.02, a MATLAB toolbox for optimization over symmetric cones. Optim. Methods Softw. 1999, 11, 625–653. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
| Symbol | Variable | Units |
|---|---|---|
| Yaw rate | rad/s | |
| Sideslip angle | rad | |
| Wheel steering angle | rad | |
| Vehicle mass | 880 Kg | |
| Yaw inertia moment | 728 Kg.m2 | |
| Rear-wheel cornering stiffness | 15,000 N/rad | |
| Front-wheel cornering stiffness | 15,000 N/rad | |
| Distance from front axis to | 0.808 m | |
| Distance from rear axis to | 1.082 m |
| Method | |
|---|---|
| [7] | |
| Theorem 1 |
| 0.1 | 1 | ||
|---|---|---|---|
| 0.1 | GSF | 0.3982 | 0.8051 |
| RF | 0.8620 | 1.7248 | |
| 1 | GSF | 0.9254 | 1.3608 |
| RF | 1.6374 | 2.1607 | |
| 0.8 | GSF | 1.8152 | 3.2889 |
| RF | 2.1251 | 3.4080 | |
| 10 | GSF | 2.0771 | 3.5376 |
| RF | 2.6645 | 4.8216 | |
| EF | GSF | 2.0782 | 3.5415 |
| RF | 2.7669 | 5.0071 |
| 0.1 | 1 | 1.38 | 1.39 | 1.49 | 1.5 | |
|---|---|---|---|---|---|---|
| GSF | 1.8152 | 2.2889 | 6.30 | 6.41 | 8.1942 | Inf |
| RF | 2.1251 | 3.4080 | 7.3702 | Inf | Inf | Inf |
| RMSE | MSE | |
|---|---|---|
| GSF | 0.1847 | 0.4298 |
| RF | 9.6868 | 3.1124 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zoulagh, T.; El Aiss, H.; Tadeo, F.; El Haiek, B.; Barbosa, K.A.; Hmamed, A. Gain-Scheduled Energy-to-Peak Approach for Vehicle Sideslip Angle Filtering. Symmetry 2024, 16, 1627. https://doi.org/10.3390/sym16121627
Zoulagh T, El Aiss H, Tadeo F, El Haiek B, Barbosa KA, Hmamed A. Gain-Scheduled Energy-to-Peak Approach for Vehicle Sideslip Angle Filtering. Symmetry. 2024; 16(12):1627. https://doi.org/10.3390/sym16121627
Chicago/Turabian StyleZoulagh, Taha, Hicham El Aiss, Fernando Tadeo, Badreddine El Haiek, Karina A. Barbosa, and Abdelaziz Hmamed. 2024. "Gain-Scheduled Energy-to-Peak Approach for Vehicle Sideslip Angle Filtering" Symmetry 16, no. 12: 1627. https://doi.org/10.3390/sym16121627
APA StyleZoulagh, T., El Aiss, H., Tadeo, F., El Haiek, B., Barbosa, K. A., & Hmamed, A. (2024). Gain-Scheduled Energy-to-Peak Approach for Vehicle Sideslip Angle Filtering. Symmetry, 16(12), 1627. https://doi.org/10.3390/sym16121627