
Stability and Numerical Simulation of a Nonlinear Hadamard Fractional Coupling Laplacian System with Symmetric Periodic Boundary Conditions


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Preliminaries
- If , then , and is increasing with respect to z;
- For all , ;
- If , then , for all ;
- For all , ;
- ;
- ;
- .
3. Existence and Uniqueness of Solutions
- and are some constants, , ;
- There are two constants , such that for all , ;
- There exist some continuous functions , such that for all , , , ;
- , where , .
4. GUH Stability
- (1)
- and ;
- (2)
- , ;
- (3)
- , ;
- (4)
- .
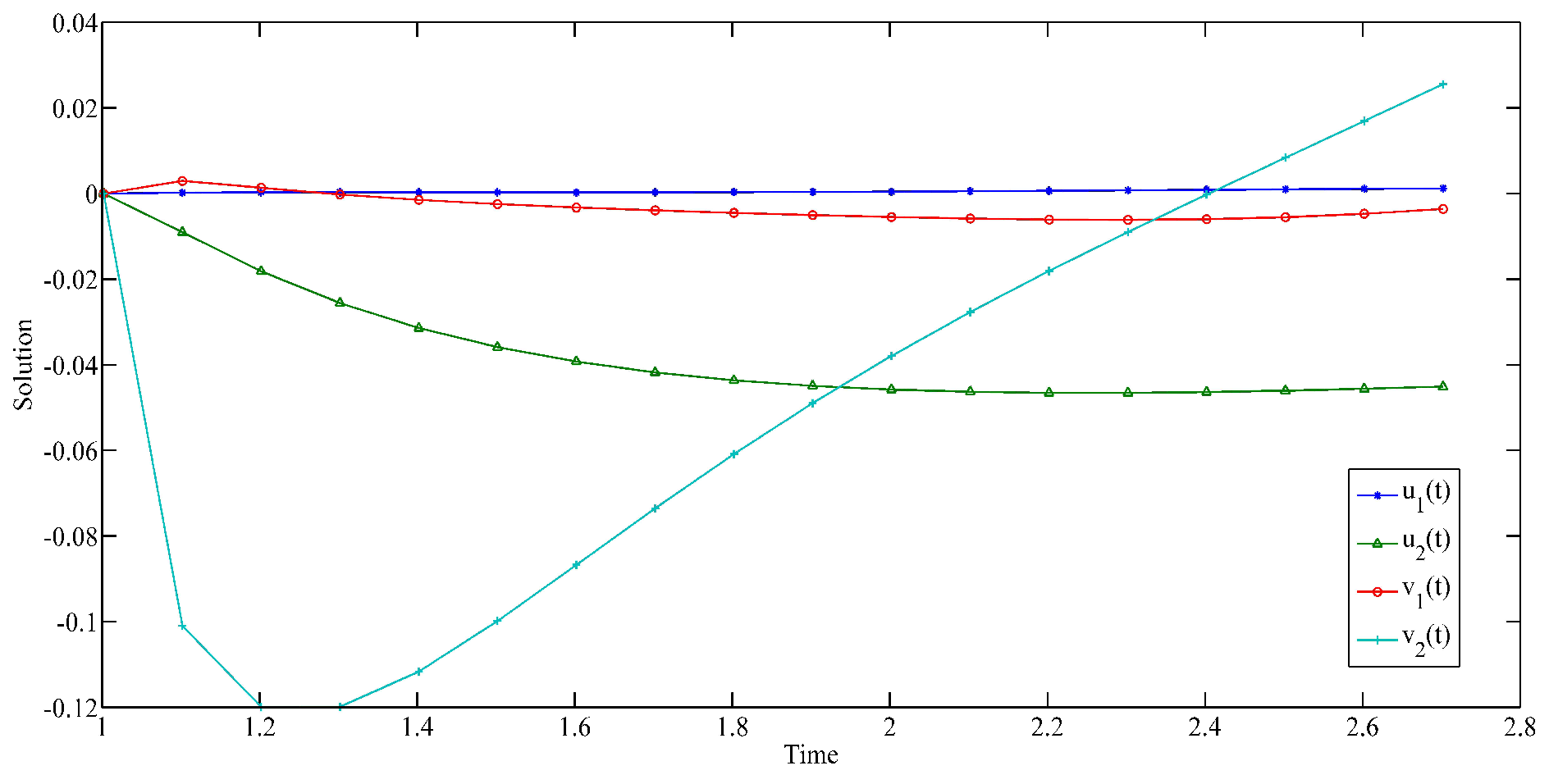
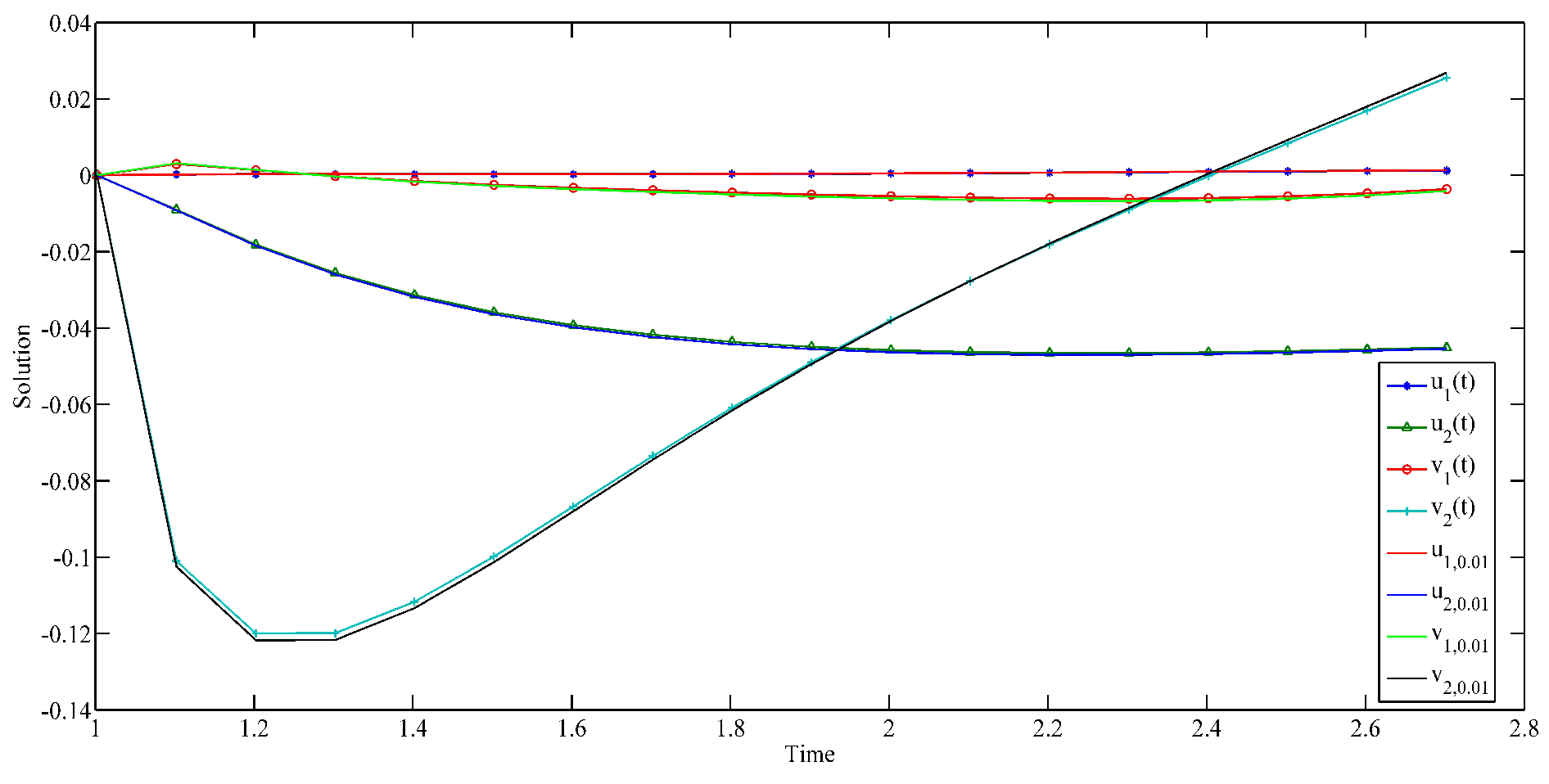
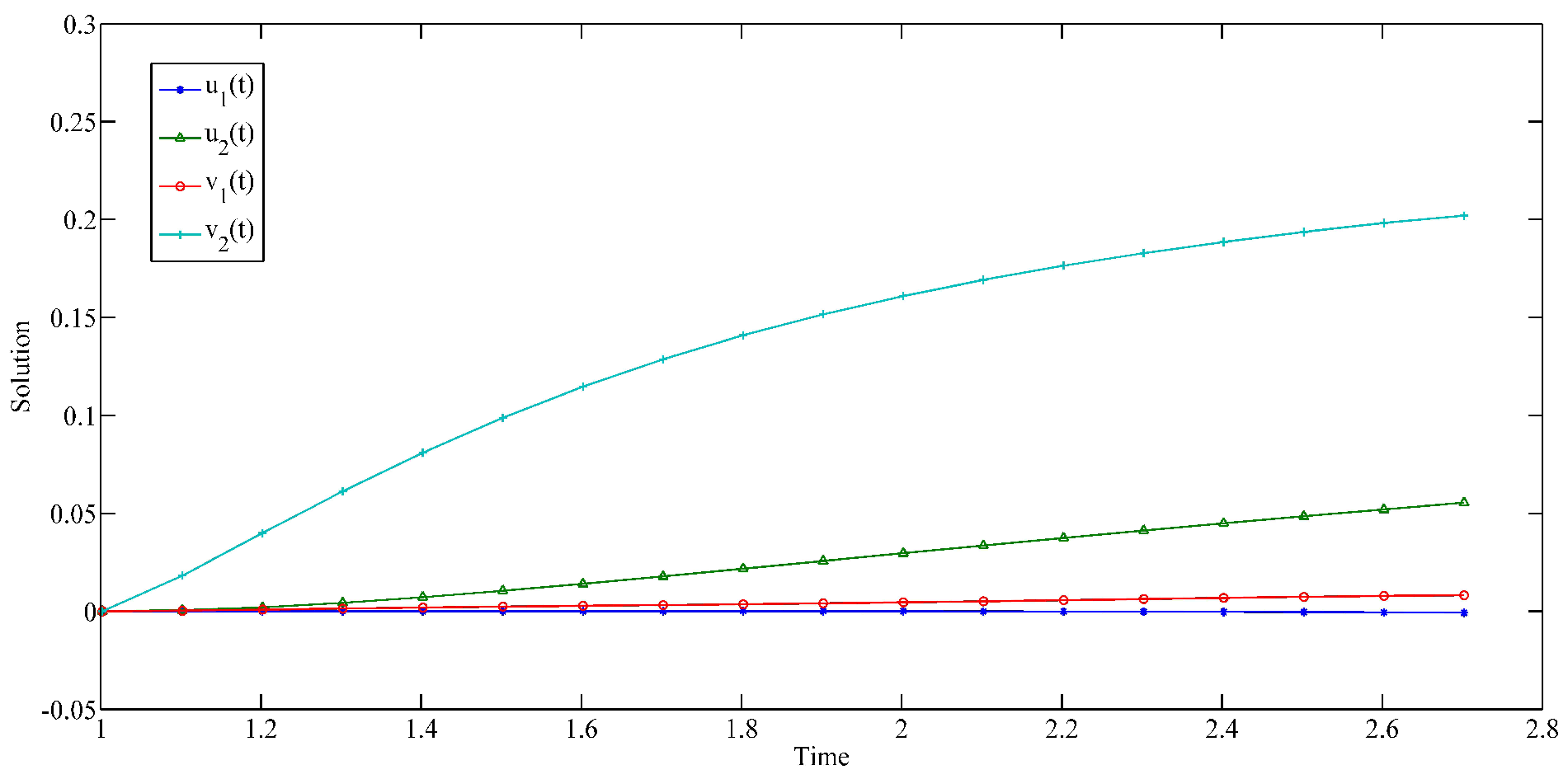
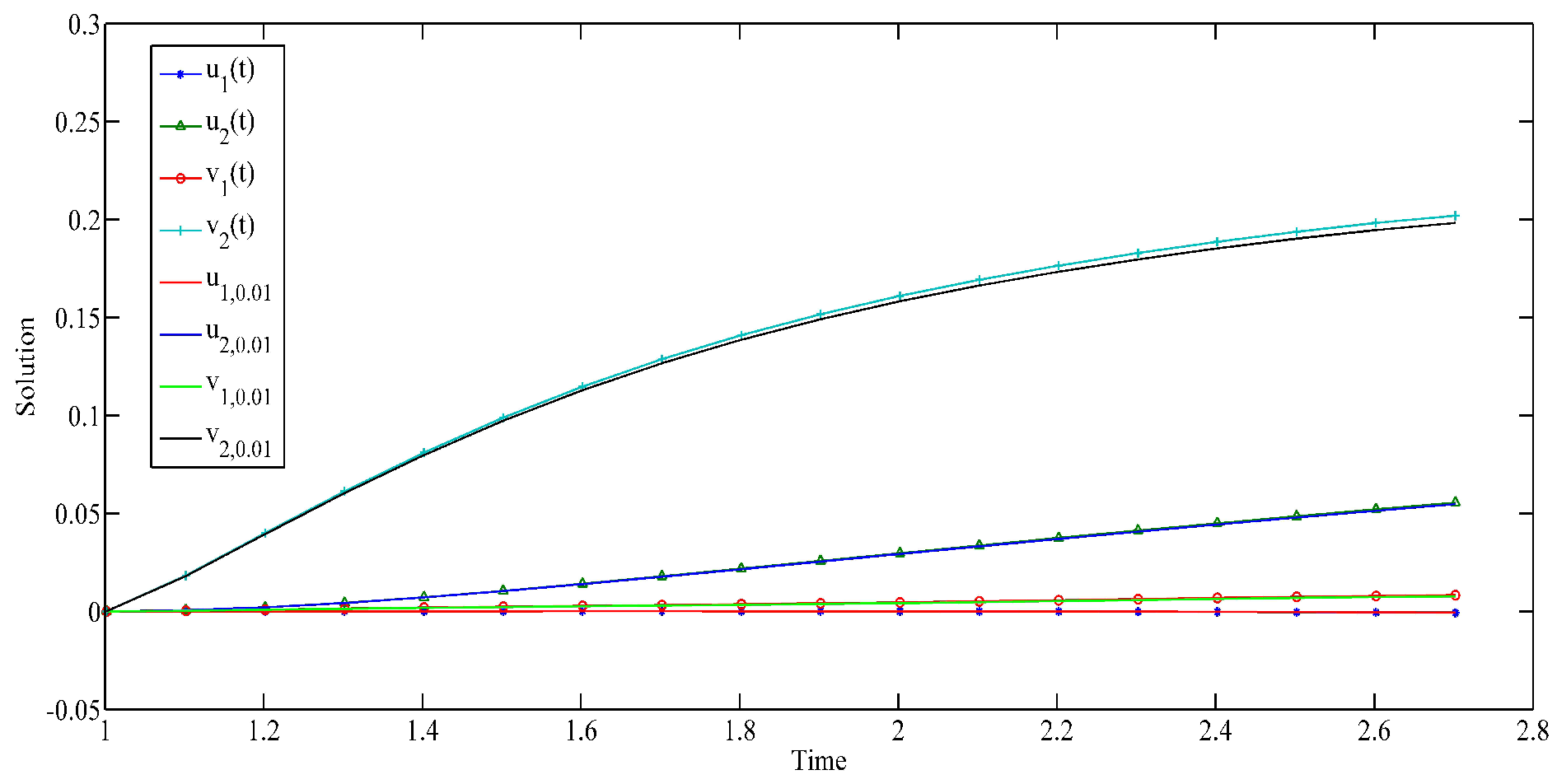
5. Three Examples and Simulations
6. Conclusions
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Hadamard, J. Essai sur l’étude des fonctions données par leur développment de Taylor. J. Math. Pures Appl. 1892, 8, 101–186. [Google Scholar]
- Ahmad, B.; Alsaedi, A.; Ntouyas, S.; Tariboon, J.J. Hadamard-Type Fractional Differential Equations, Inclusions and Inequalities; Springer: Berlin/Heidelberg, Germany, 2017. [Google Scholar]
- Kilbas, A.; Srivastava, H.M.; Trujillo, J.J. Theory and Applications of Fractional Differential Equations; Elsevier: Amsterdam, The Netherlands, 2006. [Google Scholar]
- Baleanu, D.; Diethelm, K.; Scalas, E.; Trujillo, J.J. Fractional Calculus: Models and Numerical Methods; World Scientific: Singapore, 2012. [Google Scholar]
- Miller, K.; Ross, B. An introduction to the Fractional Calculus and Differential Equations; Wiley: New York, NY, USA, 1993. [Google Scholar]
- Zhou, Y. Basic Theory of Fractional Differential Equations; World Scientific: Singapore, 2014. [Google Scholar]
- Aljoudi, S.; Ahmad, B.; Nieto, J.; Alsaedi, A. A coupled system of Hadamard type sequential fractional differential equations with coupled strip conditions. Chaos Soliton. Fract. 2016, 91, 39–46. [Google Scholar] [CrossRef]
- Benchohra, M.; Bouriah, S.; Graef, J. Boundary value problems for nonlinear implicit Caputo-Hadamard-type fractional differential equations with impulses. Mediterr. J. Math. 2017, 14, 206. [Google Scholar] [CrossRef]
- Huang, H.; Zhao, K.; Liu, X. On solvability of BVP for a coupled Hadamard fractional systems involving fractional derivative impulses. AIMS Math. 2022, 7, 19221–19236. [Google Scholar] [CrossRef]
- Mouy, M.; Boulares, H.; Alshammari, S.; Alshammari, M.; Laskri, Y.; Mohammed, W.W. On averaging principle for Caputo-Hadamard fractional stochastic differential pantograph equation. Fractal Fract. 2023, 7, 31. [Google Scholar] [CrossRef]
- Ortigueira, M.; Bohannan, G. Fractional scale calculus: Hadamard vs. Liouville. Fractal Fract. 2023, 7, 296. [Google Scholar] [CrossRef]
- Zhao, K. Existence and UH-stability of integral boundary problem for a class of nonlinear higher-order Hadamard fractional Langevin equation via Mittag–Leffler functions. Filomat 2023, 37, 1053–1063. [Google Scholar] [CrossRef]
- Nyamoradi, N.; Ahmad, B. Hadamard fractional differential equations on an unbounded domain with integro-initial conditions. Qual. Theor. Dyn. Syst. 2024, 23, 183. [Google Scholar] [CrossRef]
- Alruwaily, Y.; Venkatachalam, K.; El-hady, E. On some impulsive fractional integro-differential equation with anti-periodic conditions. Fractal Fract. 2024, 8, 219. [Google Scholar] [CrossRef]
- Hammad, H.; Aydi, H.; Kattan, D. Integro-differential equations implicated with Caputo-Hadamard derivatives under nonlocal boundary constraints. Phys. Scr. 2024, 99, 025207. [Google Scholar] [CrossRef]
- Kassim, M. Convergence to logarithmic-type functions of solutions of fractional systems with Caputo-Hadamard and Hadamard fractional derivatives. Fract. Calc. Appl. Anal. 2024, 27, 281–318. [Google Scholar] [CrossRef]
- Zhang, K.; Xu, J. Solvability for a system of Hadamard-type hybrid fractional differential inclusions. Demonstr. Math. 2023, 56, 20220226. [Google Scholar] [CrossRef]
- Ciftci, C.; Deren, F. Analysis of p-Laplacian Hadamard fractional boundary value problems with the derivative term involved in the nonlinear term. Math. Method. Appl. Sci. 2023, 46, 8945–8955. [Google Scholar] [CrossRef]
- Rafeeq, A.; Thabet, S.; Mohammed, M.; Kedim, I.; Vivas-Cortez, M. On Caputo-Hadamard fractional pantograph problem of two different orders with Dirichlet boundary conditions. Alex. Eng. J. 2024, 86, 386–398. [Google Scholar] [CrossRef]
- Leibenson, L. General problem of the movement of a compressible uid in a porous medium. Izv. Akad. Nauk Kirg. SSR Ser. Biol. Nauk 1983, 9, 7–10. [Google Scholar]
- Zhao, K. Solvability, Approximation and Stability of Periodic Boundary Value Problem for a Nonlinear Hadamard Fractional Differential Equation with p-Laplacian. Axioms 2023, 12, 733. [Google Scholar] [CrossRef]
- Zhao, K. Study on the stability and its simulation algorithm of a nonlinear impulsive ABC-fractional coupled system with a Laplacian operator via F-contractive mapping. Adv. Contin. Discret. Models 2024, 2024, 5. [Google Scholar] [CrossRef]
- Rao, S.; Ahmadini, A. Multiple positive solutions for system of mixed Hadamard fractional boundary value problems with (p1,p2)-Laplacian operator. AIMS Math. 2023, 8, 14767–14791. [Google Scholar] [CrossRef]
- Alkhazzan, A.; Al-Sadi, W.; Wattanakejorn, V.; Khan, H.; Sitthiwirattham, T.; Etemad, S.; Rezapour, S. A new study on the existence and stability to a system of coupled higher-order nonlinear BVP of hybrid FDEs under the p-Laplacian operator. AIMS Math. 2022, 7, 14187–14207. [Google Scholar] [CrossRef]
- Khan, H.; Chen, W.; Sun, H. Analysis of positive solution and Hyers-Ulam stability for a class of singular fractional differential equations with p-Laplacian in Banach space. Math. Methods Appl. Sci. 2018, 41, 3430–3440. [Google Scholar] [CrossRef]
- Li, S.; Zhang, Z.; Jiang, W. Multiple positive solutions for four-point boundary value problem of fractional delay differential equations with p-Laplacian operator. Appl. Numer. Math. 2021, 165, 348–356. [Google Scholar] [CrossRef]
- Ulam, S. A Collection of Mathematical Problems. Interscience Tracts in Pure and Applied Mathmatics; Interscience: New York, NY, USA, 1906. [Google Scholar]
- Hyers, D. On the stability of the linear functional equation. Proc. Natl. Acad. Sci. USA 1941, 27, 2222–2240. [Google Scholar] [CrossRef] [PubMed]
- Ali, Z.; Zada, A.; Shah, K. On Ulam’s stability for a coupled systems of nonlinear implicit fractional differential equations. Bull. Malays. Math. Sci. Soc. 2019, 42, 2681–2699. [Google Scholar] [CrossRef]
- Ahmad, M.; Zada, A.; Ghaderi, M.; George, R.; Rezapour, S. On the existence and stability of a neutral stochastic fractional differential system. Fractal Fract. 2022, 6, 203. [Google Scholar] [CrossRef]
- Ahmadova, A.; Mahmudov, N. Ulam-Hyers stability of Caputo type fractional stochastic neutral differential equations. Stat. Probabil. Lett. 2021, 168, 108949. [Google Scholar] [CrossRef]
- Li, M.; Wang, J. Existence results and Ulam type stability for conformable fractional oscillating system with pure delay. Chaos Soliton. Fract. 2022, 161, 112317. [Google Scholar] [CrossRef]
- Zhao, K. Stability of a nonlinear Langevin system of ML-Type fractional derivative affected by time-varying delays and differential feedback control. Fractal Fract. 2022, 6, 725. [Google Scholar] [CrossRef]
- Rizwan, R.; Liu, F.; Zheng, Z.; Park, C.; Paokanta, S. Existence theory and Ulam’s stabilities for switched coupled system of implicit impulsive fractional order Langevin equations. Bound. Value Probl. 2023, 2023, 115. [Google Scholar] [CrossRef]
- Priyadharsini, J.; Balasubramaniam, P. Hyers-Ulam stability result for hilfer fractional integrodifferential stochastic equations with fractional noises and non-instantaneous impulses. Evol. Equ. Control. Theory 2024, 13, 173–193. [Google Scholar] [CrossRef]
- Thabet, S.; Vivas-Cortez, M.; Kedim, I.; Samei, M.E.; Ayari, M.I. Solvability of a ϱ-Hilfer fractional snap dynamic system on unbounded domains. Fractal Fract. 2023, 7, 607. [Google Scholar] [CrossRef]
- Shah, S.; Rizwan, R.; Xia, Y.; Zada, A. Existence, uniqueness, and stability analysis of fractional Langevin equations with anti-periodic boundary conditions. Math. Methods Appl. Sci. 2023, 46, 17941–17961. [Google Scholar] [CrossRef]
- Zhao, K. Solvability and GUH-stability of a nonlinear CF-fractional coupled Laplacian equations. AIMS Math. 2023, 8, 13351–13367. [Google Scholar] [CrossRef]
- Alam, M.; Khalid, K. Analysis of q-fractional coupled implicit systems involving the nonlocal Riemann–Liouville and Erdelyi-Kober q-fractional integral conditions. Math. Methods Appl. Sci. 2023, 46, 12711–12734. [Google Scholar] [CrossRef]
- Khan, T.; Markarian, C.; Fachkha, C. Stability analysis of new generalized mean-square stochastic fractional differential equations and their applications in technology. AIMS Math. 2023, 8, 27840–27856. [Google Scholar] [CrossRef]
- Kiskinov, H.; Milev, M.; Cholakov, S.; Zahariev, A. Fundamental matrix, integral representation and stability analysis of the solutions of neutral fractional systems with derivatives in the Riemann–Liouville sense. Fractal Fract. 2024, 8, 195. [Google Scholar] [CrossRef]
- Bensassa, K.; Dahmani, Z.; Rakah, M.; Sarikaya, M.Z. Beam deflection coupled systems of fractional differential equations: Existence of solutions, Ulam-Hyers stability and travelling waves. Anal. Math. Phys. 2024, 14, 29. [Google Scholar] [CrossRef]
- Zhao, K. Generalized UH-stability of a nonlinear fractional coupling (p1,p2)-Laplacian system concerned with nonsingular Atangana-Baleanu fractional calculus. J. Inequal. Appl. 2023, 2023, 96. [Google Scholar] [CrossRef]
- Shah, K.; Sarwar, M.; Abdeljawad, T.; Shafiullah. Sufficient criteria for the existence of solution to nonlinear fractal-fractional order coupled system with coupled integral boundary conditions. J. Appl. Math. Comput. 2024, 70, 1771–1785. [Google Scholar] [CrossRef]
- Zhang, L.; Liu, X.; Jia, M.; Yu, Z. Piecewise conformable fractional impulsive differential system with delay: Existence, uniqueness and Ulam stability. J. Appl. Math. Comput. 2024, 70, 1543–1570. [Google Scholar] [CrossRef]
- Guo, D.; Lakshmikantham, V. Nonlinear Problems in Abstract Cone; Academic Press: Orlando, FL, USA, 1988. [Google Scholar]
- Zhao, K.; Liu, J.; Lv, X. A unified approach to solvability and stability of multipoint BVPs for Langevin and Sturm–Liouville equations with CH–fractional derivatives and impulses via coincidence theory. Fractal Fract. 2024, 8, 111. [Google Scholar] [CrossRef]
- Zhao, K. Global stability of a novel nonlinear diffusion online game addiction model with unsustainable control. AIMS Math. 2022, 7, 20752–20766. [Google Scholar] [CrossRef]

Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lv, X.; Zhao, K.; Xie, H. Stability and Numerical Simulation of a Nonlinear Hadamard Fractional Coupling Laplacian System with Symmetric Periodic Boundary Conditions. Symmetry 2024, 16, 774. https://doi.org/10.3390/sym16060774
Lv X, Zhao K, Xie H. Stability and Numerical Simulation of a Nonlinear Hadamard Fractional Coupling Laplacian System with Symmetric Periodic Boundary Conditions. Symmetry. 2024; 16(6):774. https://doi.org/10.3390/sym16060774
Chicago/Turabian StyleLv, Xiaojun, Kaihong Zhao, and Haiping Xie. 2024. "Stability and Numerical Simulation of a Nonlinear Hadamard Fractional Coupling Laplacian System with Symmetric Periodic Boundary Conditions" Symmetry 16, no. 6: 774. https://doi.org/10.3390/sym16060774
APA StyleLv, X., Zhao, K., & Xie, H. (2024). Stability and Numerical Simulation of a Nonlinear Hadamard Fractional Coupling Laplacian System with Symmetric Periodic Boundary Conditions. Symmetry, 16(6), 774. https://doi.org/10.3390/sym16060774