

Symmetry-Optimized Dynamical Analysis of Optical Soliton Patterns in the Flexibly Supported Euler–Bernoulli Beam Equation: A Semi-Analytical Solution Approach



Abstract
1. Introduction
2. Formulation of the Problem
- Neglect of deformation within the same plane.
- Dismissal of transverse shear forces (resulting in cross-section rotation solely caused by bending).
- The incompressibility condition, which suggests the absence of transverse typical strains.
3. The Traveling Wave Solutions
- 1: If and , then:
- 2: If and , then:
- 3: If and , then:
- 4: If and , then:
- 5: If and , then:
- 6: If and , then:
- 7: If , then
- 8: If , , , then
- 9: If , then
- 10: If , then
- 11: If and , then
- 12: If , , , then
3.1. Strengths and Weaknesses
3.1.1. Strengths
- Direct method: Possibly producing quicker and more effective results, the modified Khater method looks for solutions directly rather than using iterative methods.
- Multiple exact solutions: It can often compute more than 1 exact solution to the same PDE. This gives you flexibility in how to analyze the behavior of your system and explore different scenarios.
3.1.2. Weaknesses
- Limited applicability: Not all nonlinear PDEs can be solved by the modified Khater approach. Especially complicated equations or ones with certain nonlinearities might not work well with it.
- Limited theoretical framework: The modified Khater approach may have a less developed theoretical framework than some well-known analytical techniques with a solid theoretical basis.
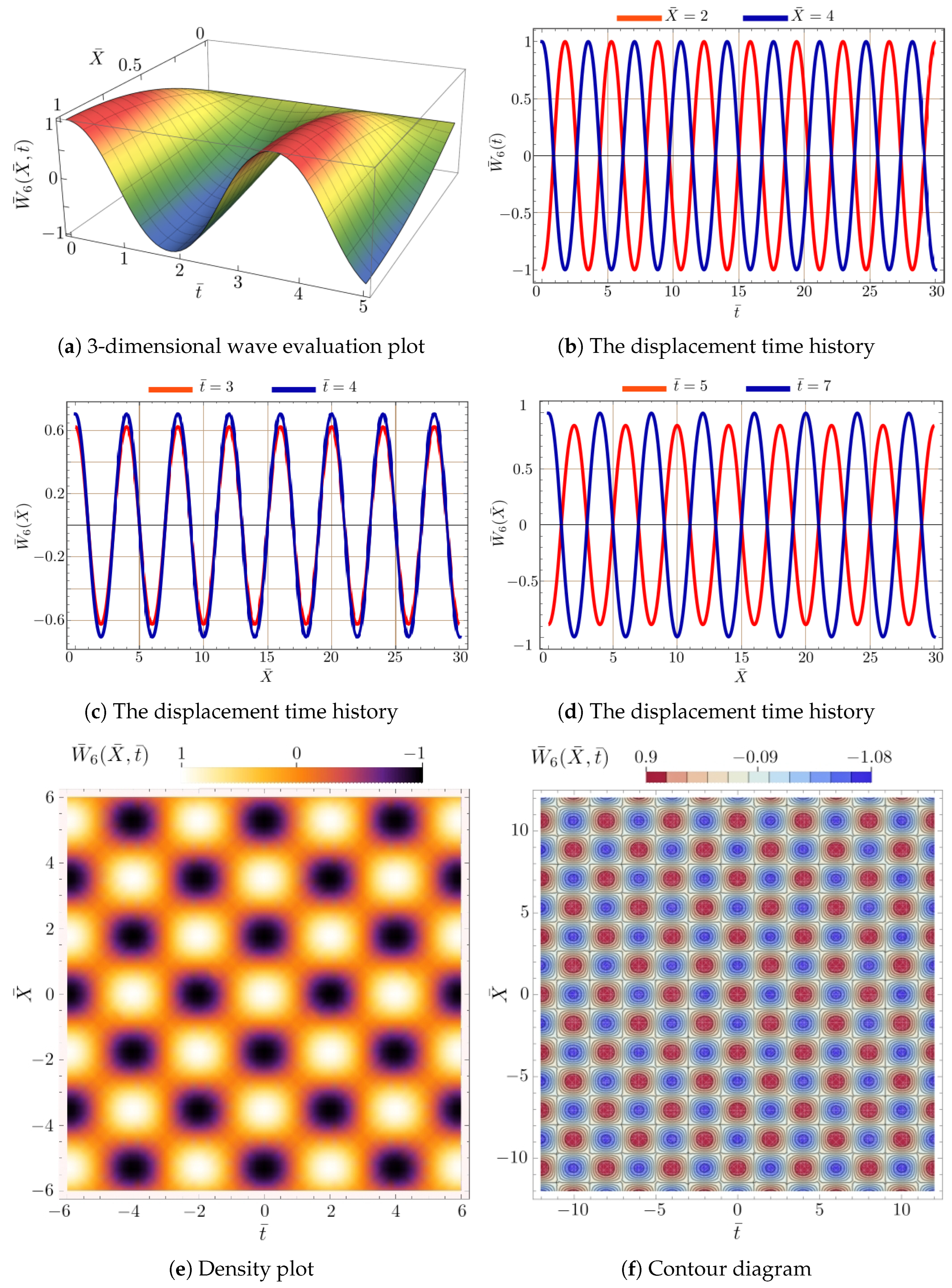
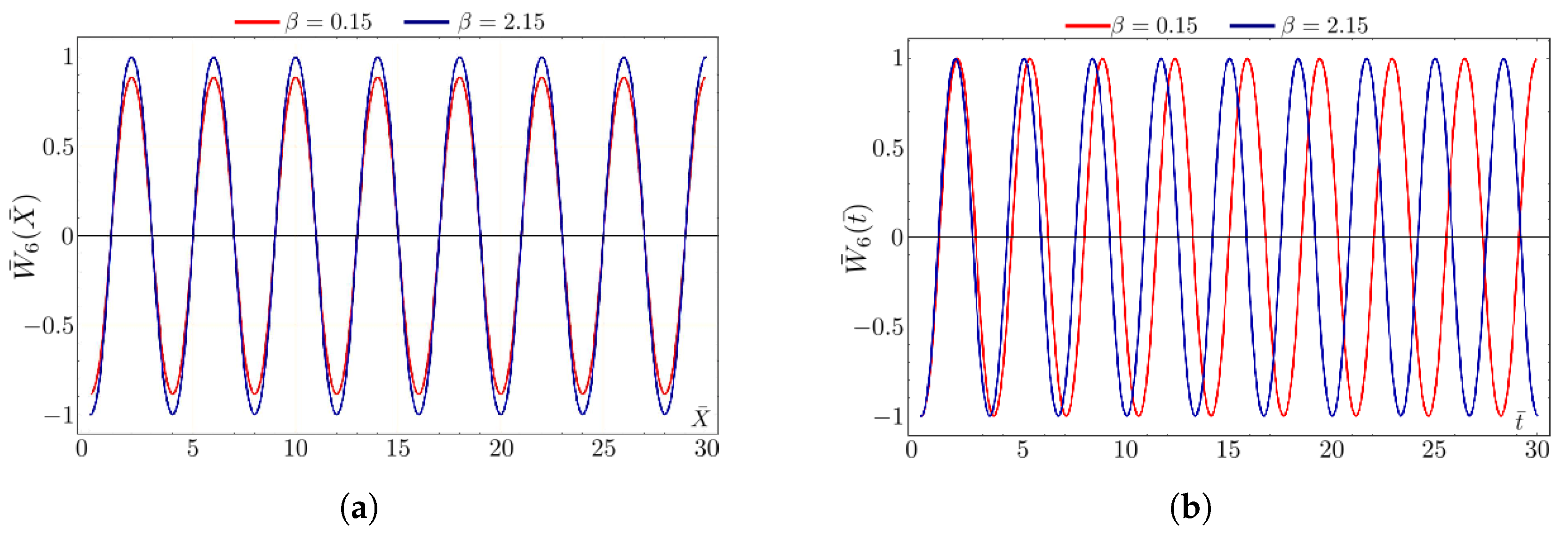
4. Visualization and Discussion of the Symmetric Wave Patterns
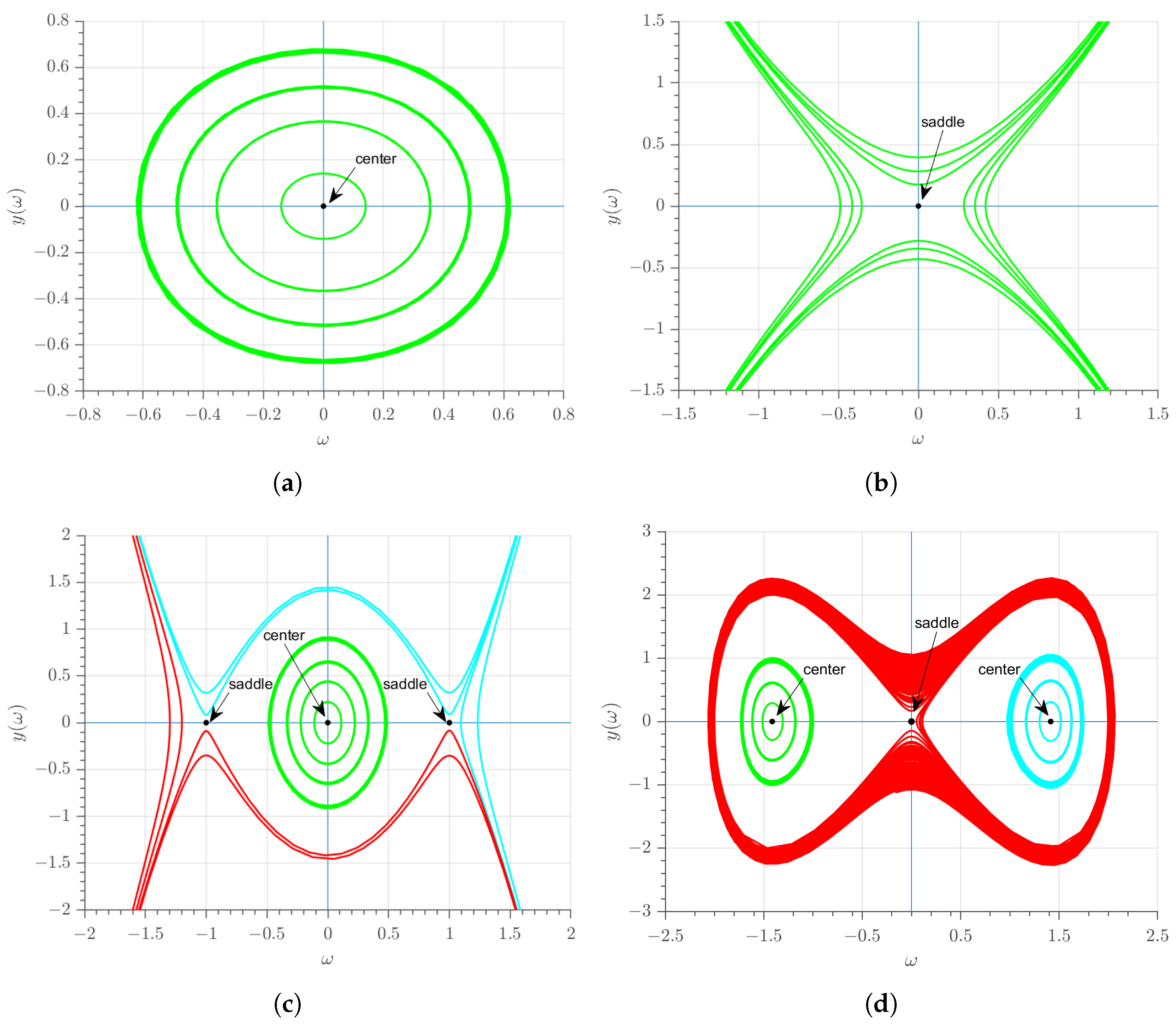
5. Dynamical Analysis
5.1. Computation and Analysis of Equilibrium Points
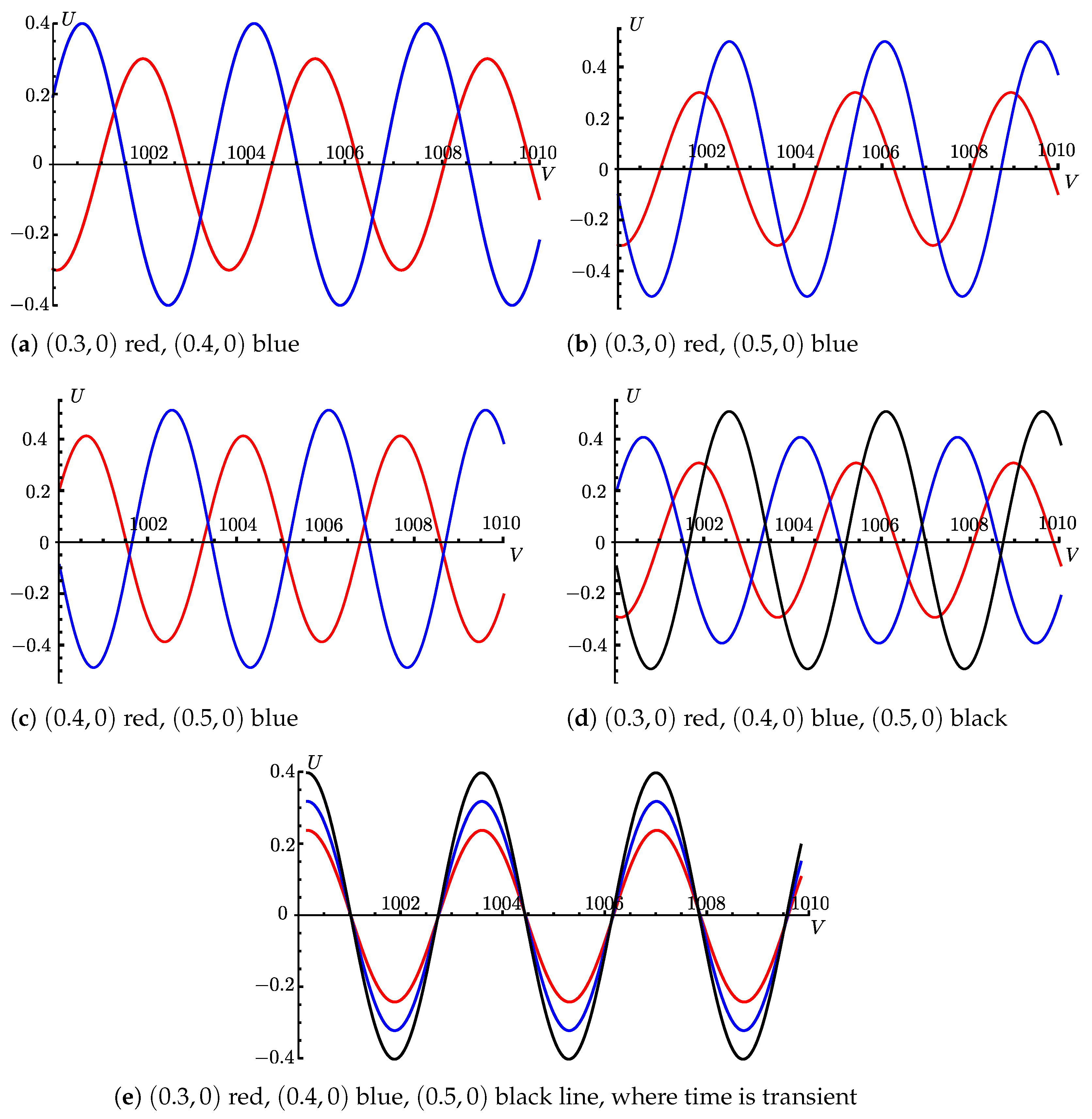
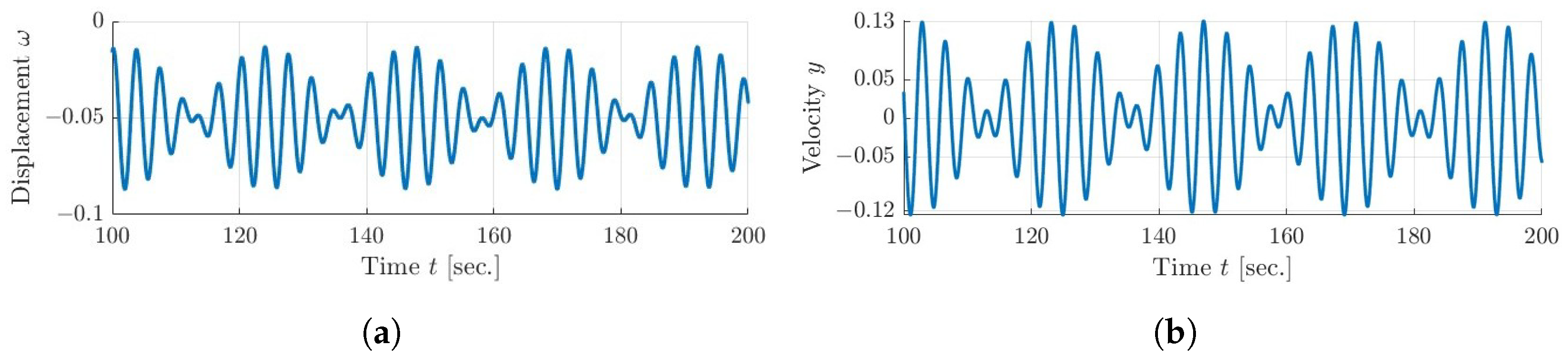
5.2. The Sensitivity Analysis
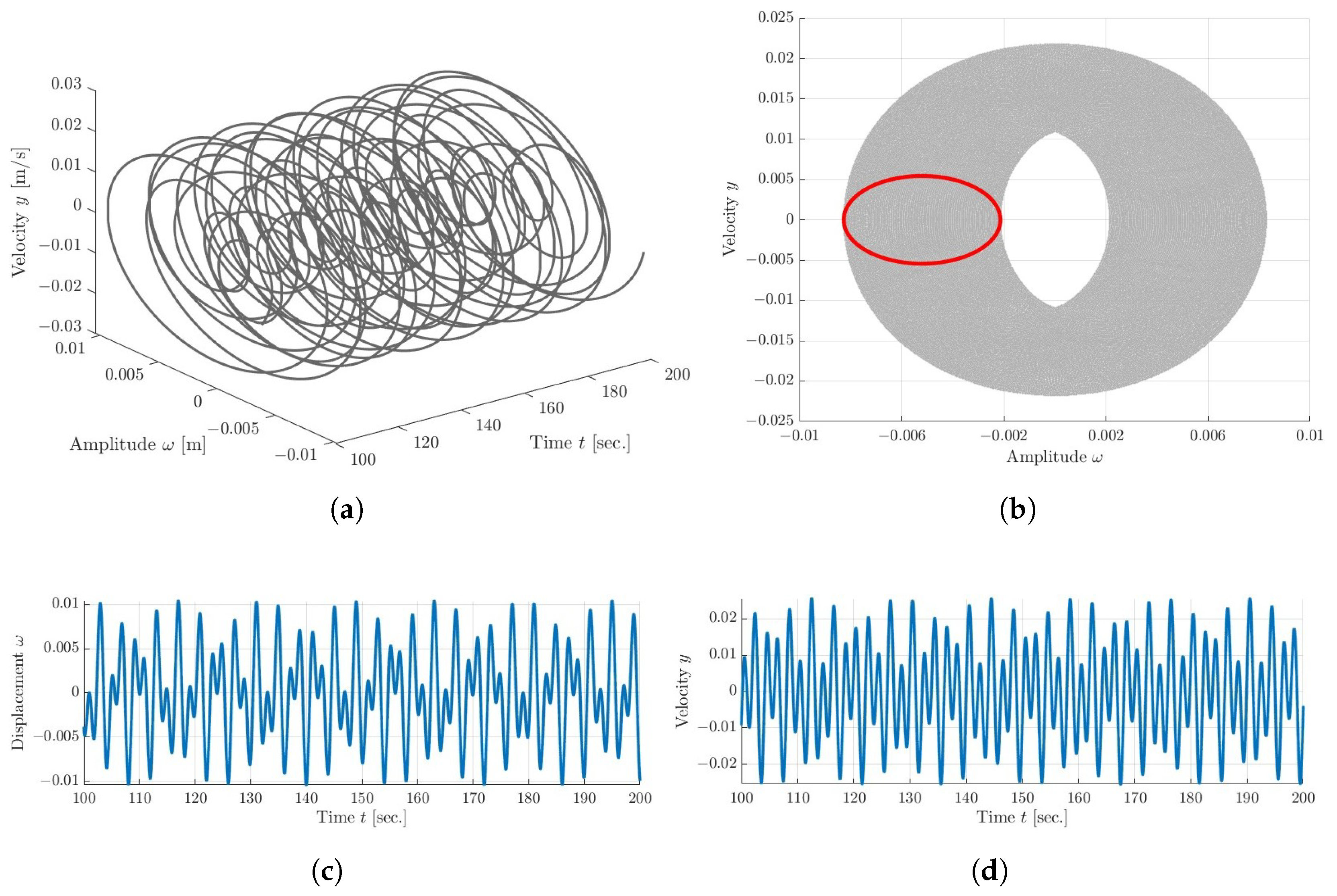
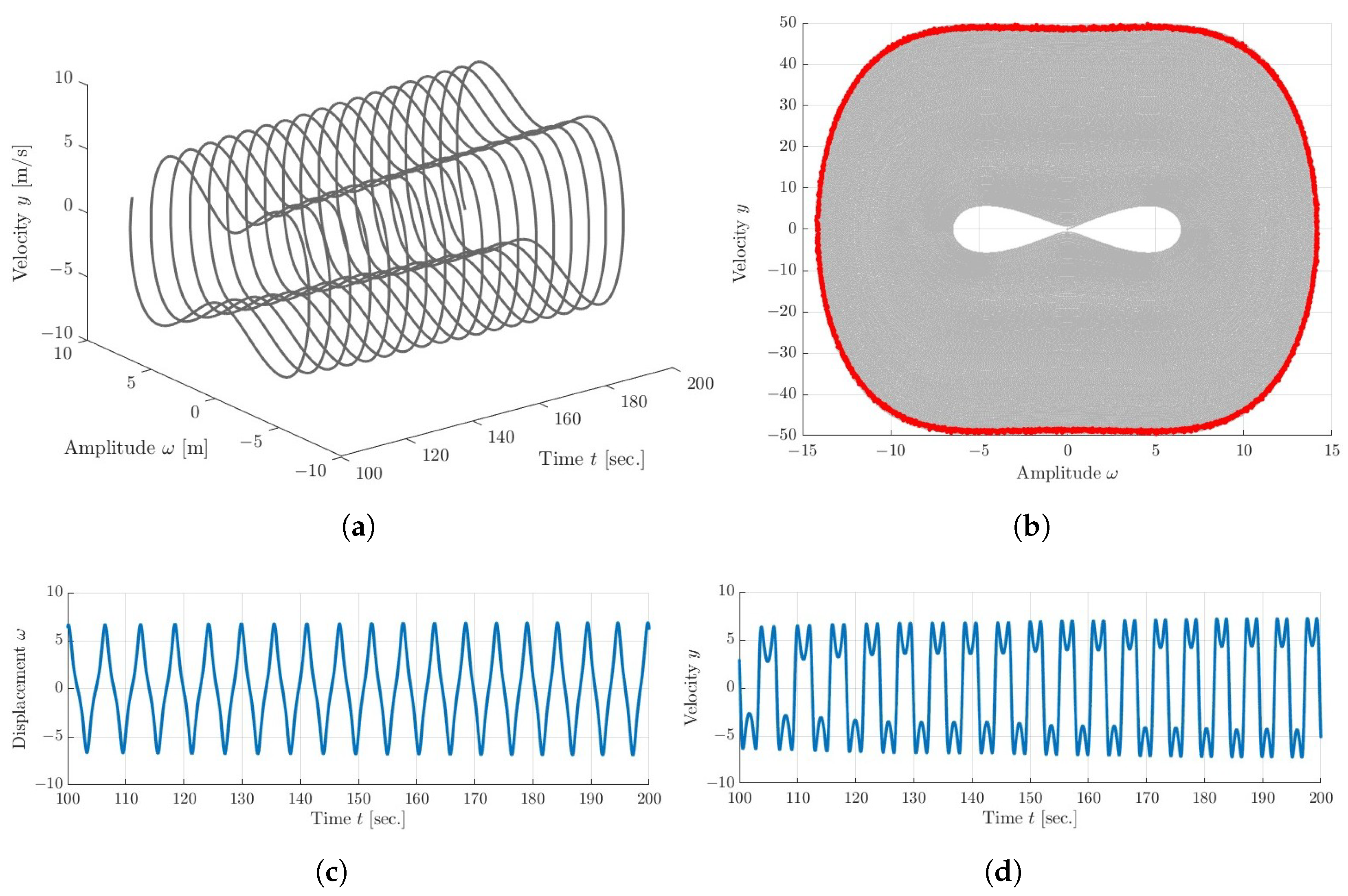
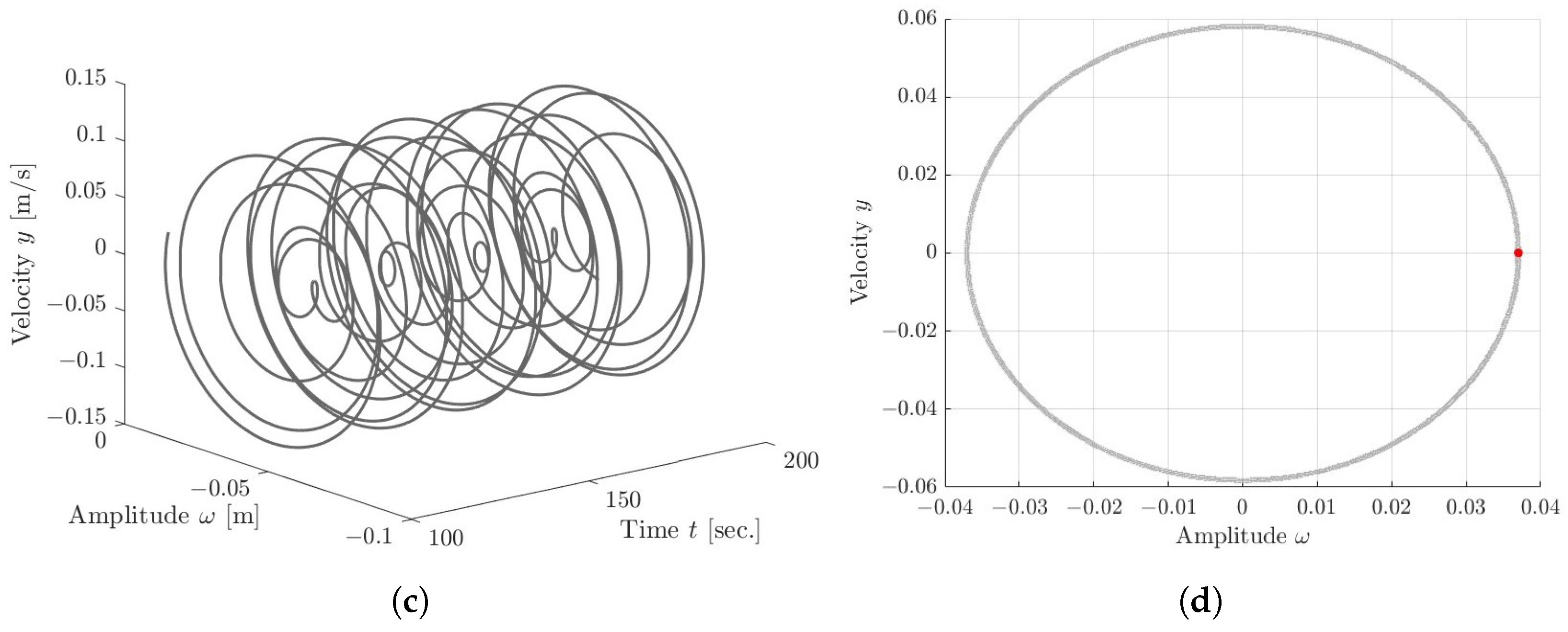
5.3. Quasi-Periodic and Chaotic Dynamics
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| Spatial coordinate along the length of the beam | |
| Time variable | |
| Length of the beam | |
| Cross-sectional area of the beam | |
| Mass per unit length of the beam | |
| Axial force | |
| Viscous Damping coefficient (set to zero in this context) | |
| Foundation modulus | |
| Young’s modulus (modulus of elasticity) of the beam material | |
| Moment of inertia of the beam’s cross-section | |
| An unknown function, often used to denote the deflection of a beam | |
| Distributed load in the transverse direction (set to zero in this context) |
Appendix A. Analytical Solution Using the Modified Khater Method
- 1: If and , then:
- 2: If and , then:
- 3: If and , then:
- 4: If and , then:
- 5: If and , then:
- 6: If and , then:
- 7: If , then
- 8: If , , , then
- 9: If , then
- 10: If , then
- 11: If and , then
- 12: If , , , then
References
- Shi, Y.; Mei, C. A finite element time domain modal formulation for large amplitude free vibrations of beams and plates. J. Sound Vib. 1996, 193, 453–464. [Google Scholar] [CrossRef]
- Sarma, B.S.; Varadan, T.K. Lagrange-type formulation for finite element analysis of non-linear beam vibrations. J. Sound Vib. 1983, 86, 61–70. [Google Scholar] [CrossRef]
- Qaisi, M.I. Application of the harmonic balance principle to the nonlinear free vibration of beams. Appl. Acoust. 1993, 40, 141–151. [Google Scholar] [CrossRef]
- Azrar, L.; Benamar, R.; White, R.G. Semi-analytical approach to the non-linear dynamic response problem of S-S and C-C beams at large vibration amplitudes part I: General theory and application to the single mode approach to free and forced vibration analysis. J. Sound Vib. 1999, 224, 183–207. [Google Scholar] [CrossRef]
- Arvin, H.; Bakhtiari-Nejad, F. Non-linear modal analysis of a rotating beam. Int. J. Non-Linear Mech. 2011, 46, 877–897. [Google Scholar] [CrossRef]
- Bahrami, M.N.; Arani, M.K.; Saleh, N.R. Modified wave approach for calculation of natural frequencies and mode shapes in arbitrary non-uniform beams. Sci. Iran. 2011, 18, 1088–1094. [Google Scholar] [CrossRef]
- Freno, B.A.; Cizmas, P.G.A. A computationally efficient non-linear beam model. Int. J. Non-Linear Mech. 2011, 46, 854–869. [Google Scholar] [CrossRef]
- Zohoor, H.; Kakavand, F. Vibration of Euler-Bernoulli and Timoshenko beams in large overall motion on flying support using finite element method. Sci. Iran. 2012, 19, 1105–1116. [Google Scholar] [CrossRef]
- Chen, J.S.; Chen, Y.K. Steady state and stability of a beam on a damped tensionless foundation under a moving load. Int. J. Non-Linear Mech. 2011, 46, 180–185. [Google Scholar] [CrossRef]
- Andreaus, U.; Placidi, L.; Rega, G. Soft impact dynamics of a cantilever beam: Equivalent SDOF model versus infinite-dimensional system. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2011, 225, 2444–2456. [Google Scholar] [CrossRef]
- Jang, T.S.; Baek, H.S.; Paik, J.K. A new method for the non-linear deflection analysis of an infinite beam resting on a non-linear elastic foundation. Int. J. Non-Linear Mech. 2011, 46, 339–346. [Google Scholar] [CrossRef]
- Sapountzakis, E.J.; Dikaros, I.C. Non-linear flexural-torsional dynamic analysis of beams of arbitrary cross section by BEM. Int. J. Non-Linear Mech. 2011, 46, 782–794. [Google Scholar] [CrossRef]
- Campanile, L.F.; Jahne, R.; Hasse, A. Exact analysis of the bending of wide beams by a modified elastic approach. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2011, 225, 2759–2764. [Google Scholar] [CrossRef]
- Bayat, M.; Pakar, I.; Bayat, M. Analytical study on the vibration frequencies of tapered beams. Lat. Am. J. Solids Struct. 2011, 8, 149–162. [Google Scholar] [CrossRef]
- He, J.H. Max-min approach to nonlinear oscillators. Int. J. Nonlinear Sci. Numer. Simul. 2008, 9, 207–210. [Google Scholar] [CrossRef]
- Sedighi, H.M.; Shirazi, K.H.; Zare, J. An analytic solution of transversal oscillation of quintic non-linear beam with homotopy analysis method. Int. J. Non-Linear Mech. 2012, 47, 777–784. [Google Scholar] [CrossRef]
- Liao, S.J. An analytic approximate approach for free oscillations of self-excited systems. Int. J. Non-Linear Mech. 2004, 39, 271–280. [Google Scholar] [CrossRef]
- Eigoli, A.K.; Vossoughi, G.R. A periodic solution for friction drive microrobots based on the iteration perturbation method. Sci. Iran. 2011, 18, 368–374. [Google Scholar] [CrossRef]
- Noghrehabadi, A.; Ghalambaz, M.; Ghanbarzadeh, A. A new approach to the electrostatic pull-in instability of nanocantilever actuators using the ADM-Pade technique. Comput. Math. Appl. 2012, 64, 2806–2815. [Google Scholar] [CrossRef]
- Shadloo, M.S.; Kimiaeifar, A. Application of homotopy perturbation method to find an analytical solution for magnetohydrodynamic flows of viscoelastic fluids in converging/diverging channels. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2011, 225, 347–353. [Google Scholar] [CrossRef]
- Soroush, R.; Koochi, A.; Kazemi, A.S.; Noghrehabadi, A.; Haddadpour, H.; Abadyan, M. Investigating the effect of Casimir and van der Waals attractions on the electrostatic pull-in instability of nano-actuators. Phys. Scr. 2010, 82, 045801. [Google Scholar] [CrossRef]
- He, J.H. Preliminary report on the energy balance for nonlinear oscillations. Mech. Res. Commun. 2002, 29, 107–111. [Google Scholar] [CrossRef]
- Bayat, M.; Shahidi, M.; Barari, A.; Domairry, G. Analytical evaluation of the nonlinear vibration of coupled oscillator systems. Z. Naturforschung A 2011, 66, 67–74. [Google Scholar] [CrossRef]
- Evirgen, F.; Ozdemir, N. Multistage adomian decomposition method for solving NLP problems over a nonlinear fractional dynamical system. J. Comput. Nonlinear Dyn. 2011, 6, 021003. [Google Scholar] [CrossRef]
- Khosrozadeh, A.; Hajabasi, M.A.; Fahham, H.R. Analytical approximations to conservative oscillators with odd nonlinearity using the variational iteration method. J. Comput. Nonlinear Dyn. 2013, 8, 014502. [Google Scholar] [CrossRef]
- He, J.H. A short remark on fractional variational iteration method. Phys. Lett. A 2011, 375, 3362–3364. [Google Scholar] [CrossRef]
- Hasanov, A. Some new classes of inverse coefficient problems in non-linear mechanics and computational material science. Int. J. Non-Linear Mech. 2011, 46, 667–684. [Google Scholar] [CrossRef]
- He, J.H. Hamiltonian approach to nonlinear oscillators. Phys. Lett. A 2010, 374, 2312–2314. [Google Scholar] [CrossRef]
- Naderi, A.; Saidi, A.R. Buckling analysis of functionally graded annular sector plates resting on elastic foundations. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2011, 225, 312–325. [Google Scholar] [CrossRef]
- Baferani, A.H.; Saidi, A.R.; Jomehzadeh, E. An exact solution for free vibration of thin functionally graded rectangular plates. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2011, 225, 526–536. [Google Scholar] [CrossRef]
- He, J.H. Modified Lindstedt-Poincare methods for some strongly non-linear oscillations: Part I: Expansion of a constant. Int. J. Non-Linear Mech. 2002, 37, 309–314. [Google Scholar] [CrossRef]
- Rezazadeh, H.; Inc, M.; Baleanu, D. New solitary wave solutions for variants of (3 + 1)-dimensional Wazwaz-Benjamin-Bona-Mahony equations. Front. Phys. 2020, 8, 332. [Google Scholar] [CrossRef]
- Jin, S.; Liu, N.; Yu, Y. Time complexity analysis of quantum algorithms via linear representations for nonlinear ordinary and partial differential equations. J. Comput. Phys. 2023, 487, 112149. [Google Scholar] [CrossRef]
- Ullah, N.; Rehman, H.U.; Imran, M.A.; Abdeljawad, T. Highly dispersive optical solitons with cubic law and cubic-quintic-septic law nonlinearities. Results Phys. 2020, 17, 103021. [Google Scholar] [CrossRef]
- Zhao, D.; Lu, D.; Salama, S.A.; Khater, M.M. Stable novel and accurate solitary wave solutions of an integrable equation: Qiao model. Open Phys. 2021, 19, 742–752. [Google Scholar] [CrossRef]
- Baishya, C.; Rangarajan, R. A new application of G′/G-expansion method for travelling wave solutions of fractional PDEs. Int. J. Appl. Eng. Res. 2018, 13, 9936–9942. [Google Scholar]
- Younas, U.; Baber, M.Z.; Yasin, M.W.; Sulaiman, T.A.; Ren, J. The generalized higher-order nonlinear Schrodinger equation: Optical solitons and other solutions in fiber optics. Int. J. Mod. Phys. B 2023, 37, 2350174. [Google Scholar] [CrossRef]
- Biswas, A.; Yildirim, Y.; Yasar, E.; Zhou, Q.; Moshokoa, S.P.; Belic, M. Optical solitons for Lakshmanan-Porsezian-Daniel model by modified simple equation method. Optik 2018, 160, 24–32. [Google Scholar] [CrossRef]
- Zayed, E.M.; Alngar, M.E. Optical solitons in birefringent fibers with Biswas-Arshed model by generalized Jacobi elliptic function expansion method. Optik 2020, 203, 163922. [Google Scholar] [CrossRef]
- Raslan, K.R.; Ali, K.K.; Shallal, M.A. The modified extended tanh method with the Riccati equation for solving the space-time fractional EW and MEW equations. Chaos Solitons Fractals 2017, 103, 404–409. [Google Scholar] [CrossRef]
- Akbari, M. Application of Kudryashov method for the Ito equations. Appl. Appl. Math. Int. J. AAM 2017, 12, 9. [Google Scholar]
- Feng, D.; Luo, G. The improved Fan sub-equation method and its application to the SK equation. Appl. Math. Comput. 2009, 215, 1949–1967. [Google Scholar] [CrossRef]
- Mahak, N.; Akram, G. Exact solitary wave solutions by extended rational sine-cosine and extended rational sinh-cosh techniques. Phys. Scr. 2019, 94, 115212. [Google Scholar] [CrossRef]
- Raza, N.; Rafiq, M.H. Abundant fractional solitons to the coupled nonlinear Schrodinger equations arising in shallow water waves. Int. J. Mod. Phys. B 2020, 34, 2050162. [Google Scholar] [CrossRef]
- Qin, M.; Wang, Y.; Yuen, M. Optimal System, Symmetry Reductions and Exact Solutions of the (2+ 1)-Dimensional Seventh-Order Caudrey-Dodd-Gibbon-KP Equation. Symmetry 2024, 16, 403. [Google Scholar] [CrossRef]
- Younas, U.; Sulaiman, T.A.; Ren, J. Dynamics of optical pulses in fiber optics with stimulated Raman scattering effect. Int. J. Mod. Phys. B 2023, 37, 2350080. [Google Scholar] [CrossRef]
- Riaz, M.B.; Jhangeer, A.; Martinovic, J.; Kazmi, S.S. Dynamics and Soliton Propagation in a Modified Oskolkov Equation: Phase Plot Insights. Symmetry 2023, 15, 2171. [Google Scholar] [CrossRef]
- Rafiq, M.H.; Jhangeer, A.; Raza, N. The analysis of solitonic, supernonlinear, periodic, quasiperiodic, bifurcation and chaotic patterns of perturbed Gerdjikov-Ivanov model with full nonlinearity. Commun. Nonlinear Sci. Numer. Simul. 2023, 116, 106818. [Google Scholar] [CrossRef]
- Jhangeer, A.; Raza, N.; Rezazadeh, H.; Seadawy, A. Nonlinear self-adjointness, conserved quantities, bifurcation analysis and travelling wave solutions of a family of long-wave unstable lubrication model. Pramana 2020, 94, 1–9. [Google Scholar] [CrossRef]
- Jhangeer, A.; Rezazadeh, H.; Seadawy, A. A study of travelling, periodic, quasiperiodic and chaotic structures of perturbed Fokas-Lenells model. Pramana 2021, 95, 1–11. [Google Scholar] [CrossRef]
- Jhangeer, A.; Hussain, A.; Junaid-U-Rehman, M.; Baleanu, D.; Riaz, M.B. Quasi-periodic, chaotic and travelling wave structures of modified Gardner equation. Chaos Solitons Fractals 2021, 143, 110578. [Google Scholar] [CrossRef]
- Imran, M.; Jhangeer, A.; Ansari, A.R.; Riaz, M.B.; Ghazwani, H.A. Investigation of space-time dynamics of perturbed and unperturbed Chen-Lee-Liu equation: Unveiling bifurcations and chaotic structures. Alex. Eng. J. 2024, 97, 283–293. [Google Scholar] [CrossRef]
- Gorbunov-Posadov, M.I. Design of structure upon elastic foundations. Proc. VICSMFE 1961, 1, 643–648. [Google Scholar]
- Soldatos, K.P.; Selvadurai, A.P.S. Flexure of beams resting on hyperbolic elastic foundations. Int. J. Solids Struct. 1985, 21, 373–388. [Google Scholar] [CrossRef]
- Al-Hosani, K.; Fadhil, S.; El-Zafrany, A. Fundamental solution and boundary element analysis of thick plates on Winkler foundation. Comput. Struct. 1999, 70, 325–336. [Google Scholar] [CrossRef]
- Wu, T.Y.; Liu, G. A differential quadrature as a numerical method to solve differential equations. Comput. Mech. 1999, 24, 197–205. [Google Scholar] [CrossRef]
- Kopmaz, O.; Gundogdu, O. On the curvature of an Euler-Bernoulli beam. Int. J. Mech. Eng. Educ. 2003, 31, 132–142. [Google Scholar] [CrossRef]
- Pirbodaghi, T.; Ahmadian, M.T.; Fesanghary, M. On the homotopy analysis method for non-linear vibration of beams. Mech. Res. Commun. 2009, 36, 143–148. [Google Scholar] [CrossRef]
- Burgreen, D. Free vibrations of a pin-ended column with constant distance between pin ends. J. Appl. Mech. 2021, 18, 135–139. [Google Scholar] [CrossRef]
- Malla, A.; Natarajan, S. Fragile points method for Euler–Bernoulli beams. Eur. J. Mech.-A/Solids 2024, 106, 105319. [Google Scholar] [CrossRef]
- Fudlailah, P.; Allen, D.H.; Cordes, R. Verification of Euler–Bernoulli beam theory model for wind blade structure analysis. Thin-Walled Struct. 2024, 202, 111989. [Google Scholar] [CrossRef]
- Ataman, M.; Szcześniak, W. Influence of Inertial Vlasov Foundation Parameters on the Dynamic Response of the Bernoulli-Euler Beam Subjected to A Group of Moving Forces-Analytical Approach. Materials 2022, 15, 3249. [Google Scholar] [CrossRef] [PubMed]
- He, X.; Song, Y.; Han, Z.; Zhang, S.; Jing, P.; Qi, S. Adaptive inverse backlash boundary vibration control design for an Euler-Bernoulli beam system. J. Frankl. Inst. 2020, 357, 3434–3450. [Google Scholar] [CrossRef]
- Wang, Z.; Wu, W.; Görges, D.; Lou, X. Sliding mode vibration control of an Euler-Bernoulli beam with unknown external disturbances. Nonlinear Dyn. 2022, 110, 1393–1404. [Google Scholar] [CrossRef]
- Rao, S.S. Vibration of Continuous Systems, 2nd ed.; John Wiley & Sons: Hoboken, NJ, USA, 2019. [Google Scholar]
- Tse, F.S.; Morse, I.E.; Hinkle, R.T. Mechanical Vibrations; Allyn and Bacon: Boston, MA, USA, 1963. [Google Scholar]
- Barari, A.; Kaliji, H.D.; Ghadimi, M.; Domairry, G. Non-linear vibration of Euler-Bernoulli beams. Lat. Am. J. Solids Struct. 2011, 8, 139–148. [Google Scholar] [CrossRef]
- Khater, M.M.; Seadawy, A.R.; Lu, D. Elliptic and solitary wave solutions for Bogoyavlenskii equations system, couple Boiti-Leon-Pempinelli equations system and Time-fractional Cahn-Allen equation. Results Phys. 2017, 7, 2325–2333. [Google Scholar] [CrossRef]
- Hussain, A.; Jhangeer, A.; Abbas, N.; Khan, I.; Sherif, E.S.M. Optical solitons of fractional complex Ginzburg-Landau equation with conformable, beta, and M-truncated derivatives: A comparative study. Adv. Differ. Equ. 2020, 2020, 612. [Google Scholar] [CrossRef]
- Riaz, M.B.; Awrejcewicz, J.; Jhangeer, A.; Junaid-U-Rehman, M. A Variety of New Traveling Wave Packets and Conservation Laws to the Nonlinear Low-Pass Electrical Transmission Lines via Lie Analysis. Fractal Fract. 2021, 5, 170. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Umer, M.; Olejnik, P. Symmetry-Optimized Dynamical Analysis of Optical Soliton Patterns in the Flexibly Supported Euler–Bernoulli Beam Equation: A Semi-Analytical Solution Approach. Symmetry 2024, 16, 849. https://doi.org/10.3390/sym16070849
Umer M, Olejnik P. Symmetry-Optimized Dynamical Analysis of Optical Soliton Patterns in the Flexibly Supported Euler–Bernoulli Beam Equation: A Semi-Analytical Solution Approach. Symmetry. 2024; 16(7):849. https://doi.org/10.3390/sym16070849
Chicago/Turabian StyleUmer, Muhammad, and Paweł Olejnik. 2024. "Symmetry-Optimized Dynamical Analysis of Optical Soliton Patterns in the Flexibly Supported Euler–Bernoulli Beam Equation: A Semi-Analytical Solution Approach" Symmetry 16, no. 7: 849. https://doi.org/10.3390/sym16070849
APA StyleUmer, M., & Olejnik, P. (2024). Symmetry-Optimized Dynamical Analysis of Optical Soliton Patterns in the Flexibly Supported Euler–Bernoulli Beam Equation: A Semi-Analytical Solution Approach. Symmetry, 16(7), 849. https://doi.org/10.3390/sym16070849