
Flow Effects and Propulsion Performance on Various Single Expansion Ramp Nozzle Configurations of Scramjet Engine
Abstract
:1. Introduction
2. Methods
2.1. Conservation Equations
2.1.1. Flow Dynamic Model
2.1.2. Turbulent Model
2.2. Computational Methods
2.2.1. Time Discretization
2.2.2. Space Discretization
2.3. Mesh Design, Computational Conditions, and Boundary Conditions
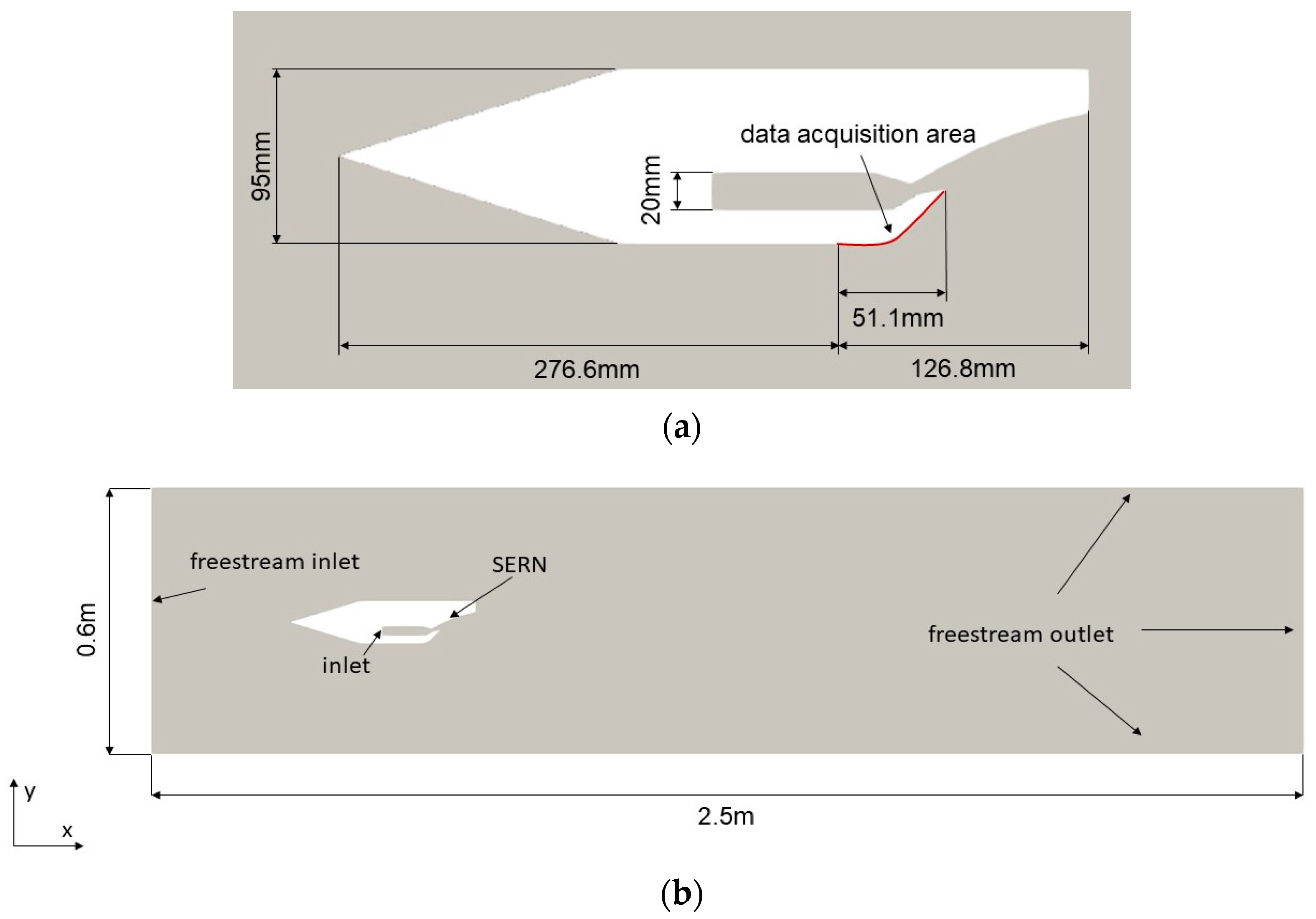
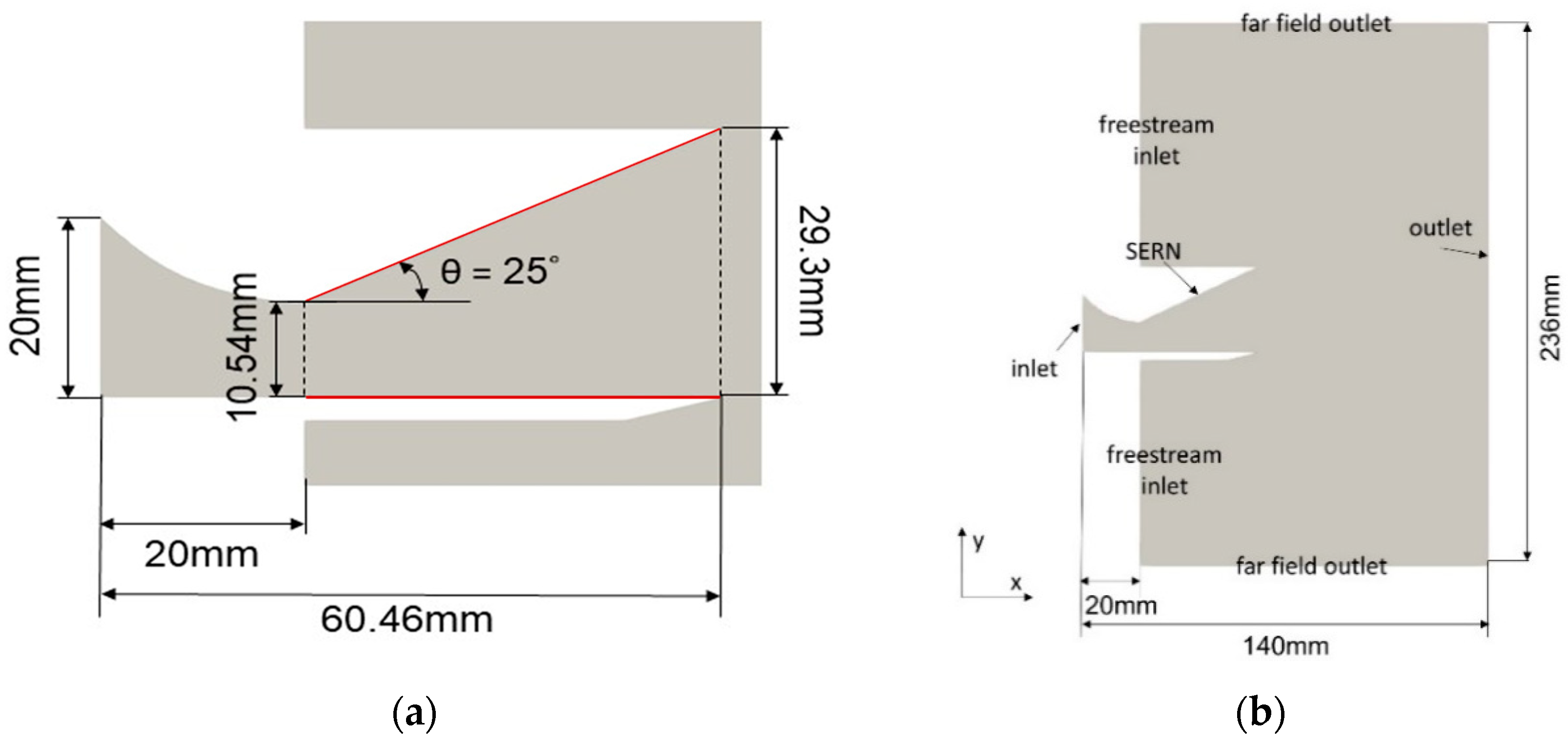
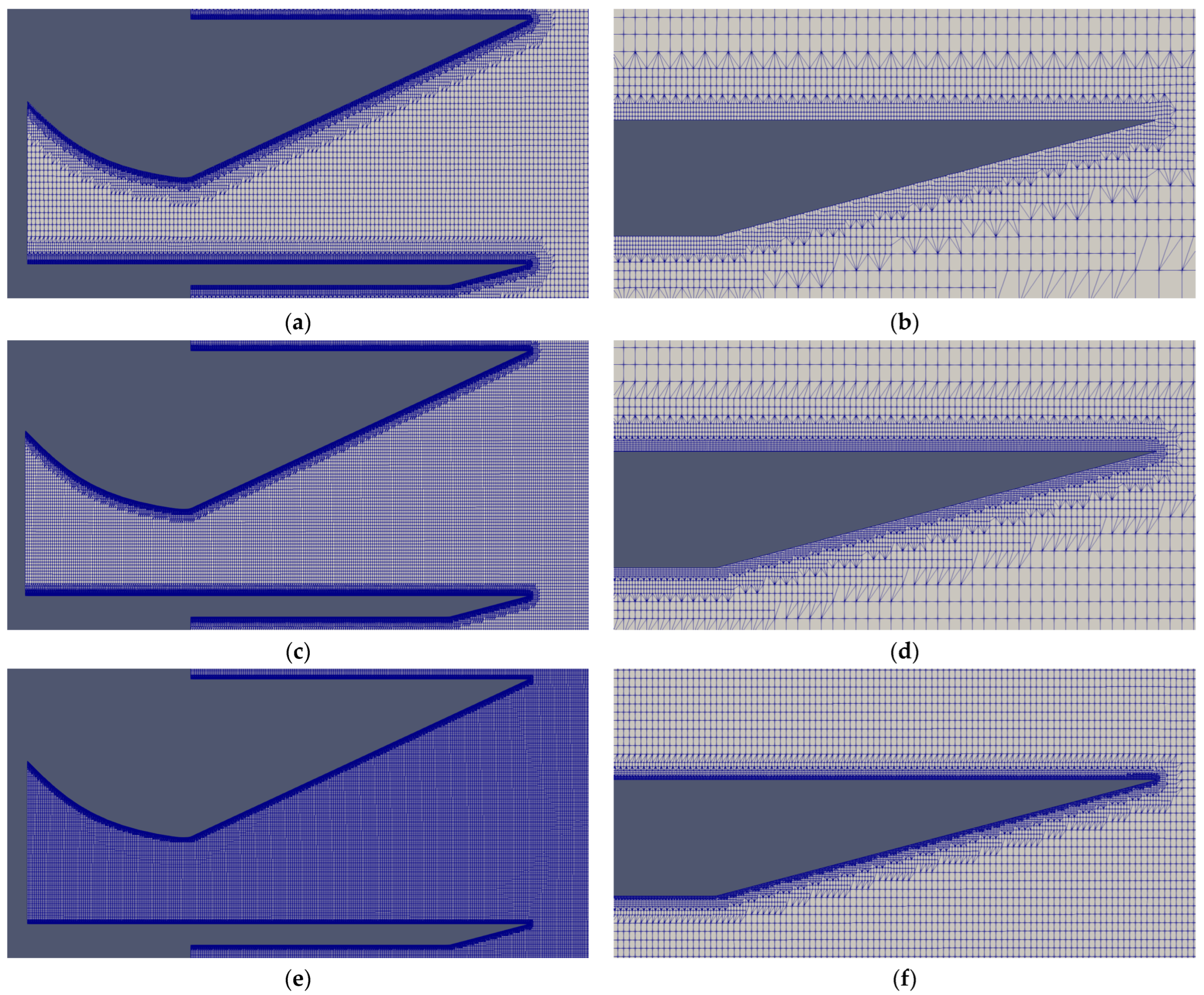
2.3.1. Configuration Design and Mesh Construction Approach
2.3.2. Flow Domain and Mesh
Verification Configurations
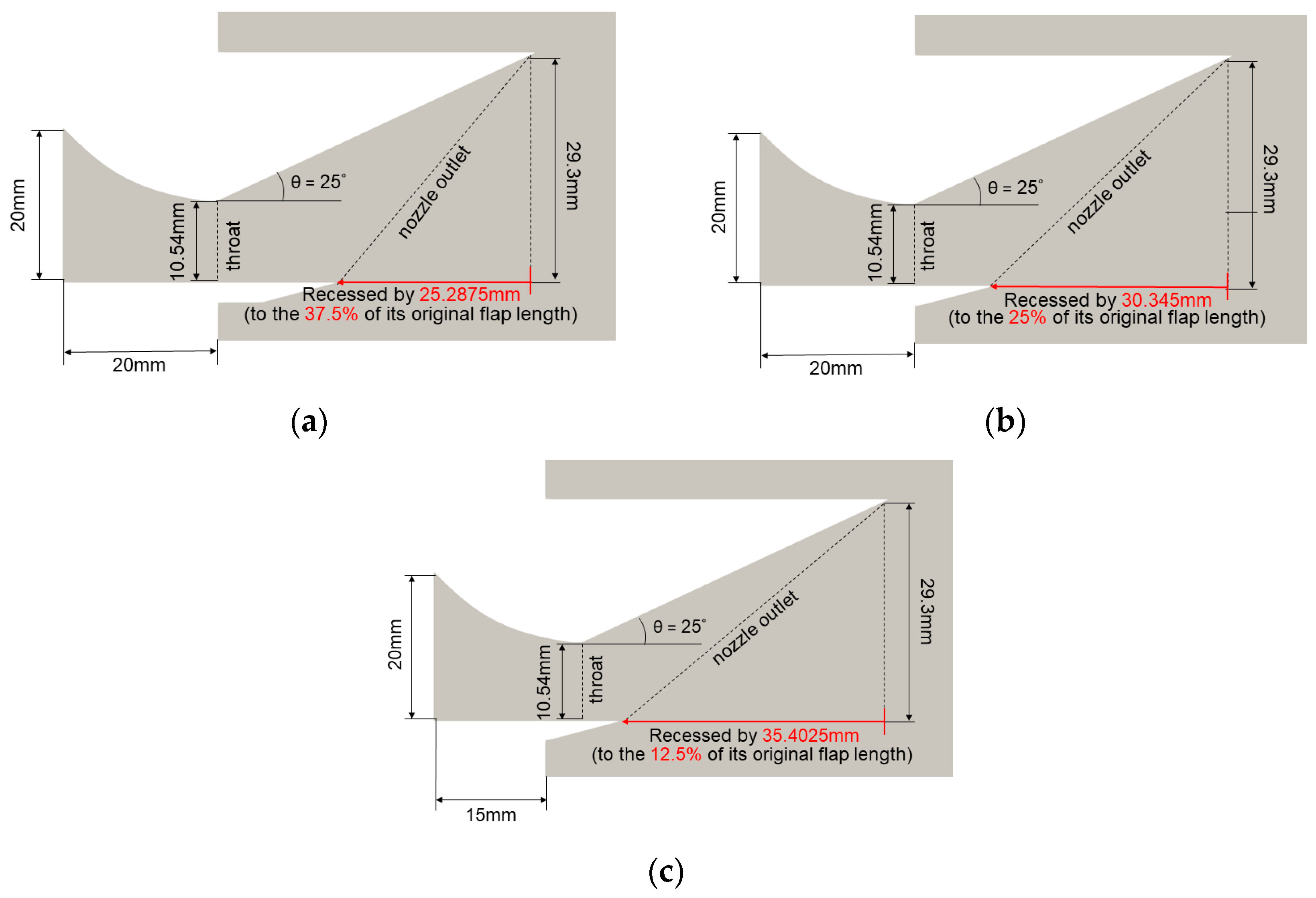
Studied Configurations
2.3.3. Boundary Conditions
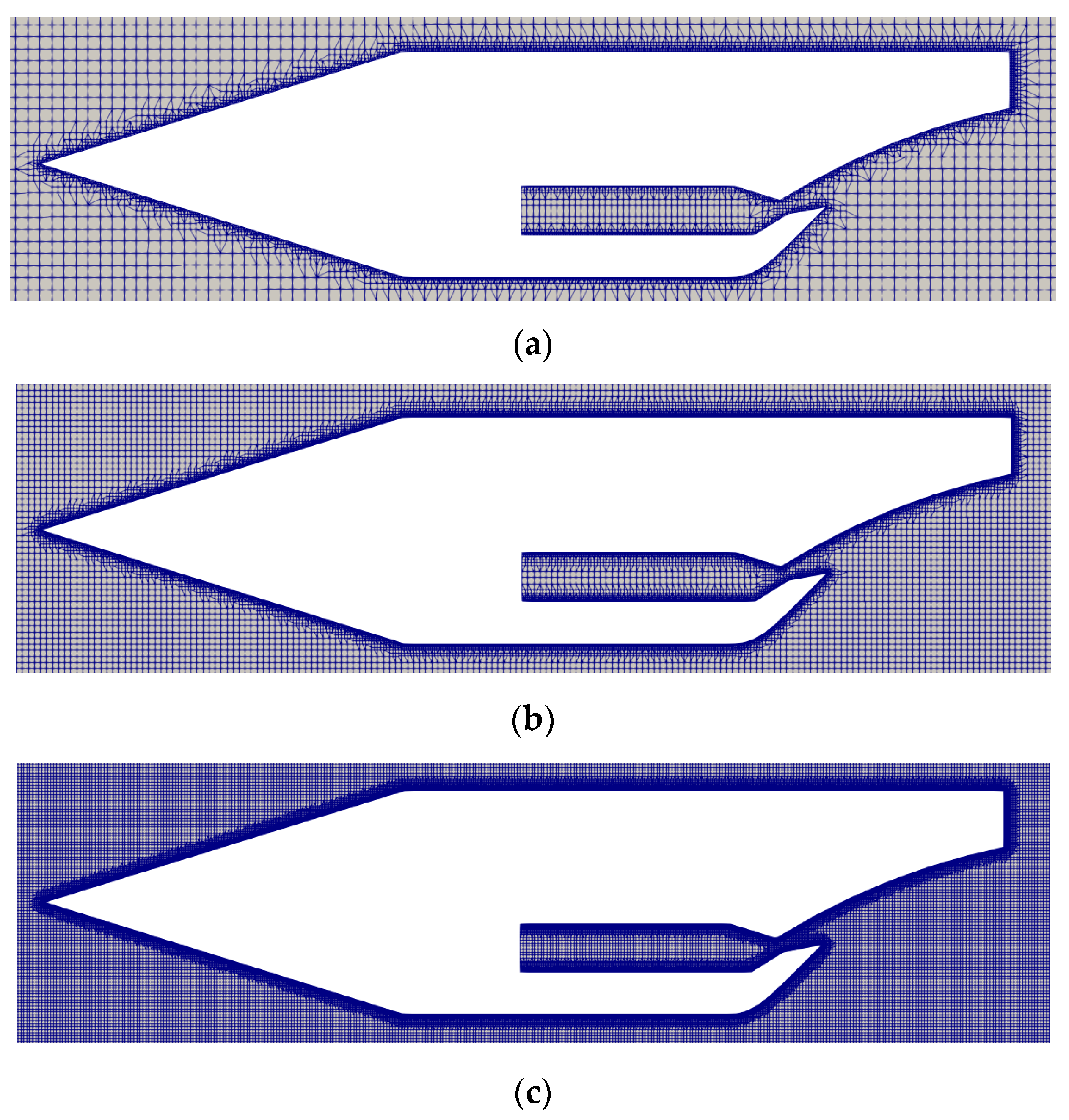
2.3.4. Mesh Verification Conditions for Configuration 1
2.3.5. Mesh Verification Conditions for Configuration 2
3. Results and Discussion
3.1. Mesh Verification
3.1.1. Mesh Verification Results for Configuration 1
Pressure Coefficient Verification
3.1.2. Mesh Verification Results for Configuration 2
Pressure Coefficient Verification
Analysis of Flow Field and Propulsion Performance
3.2. Research Model
3.2.1. Analysis of Propulsion Performance for Conical-Shaped SERNs with Different Flap Lengths
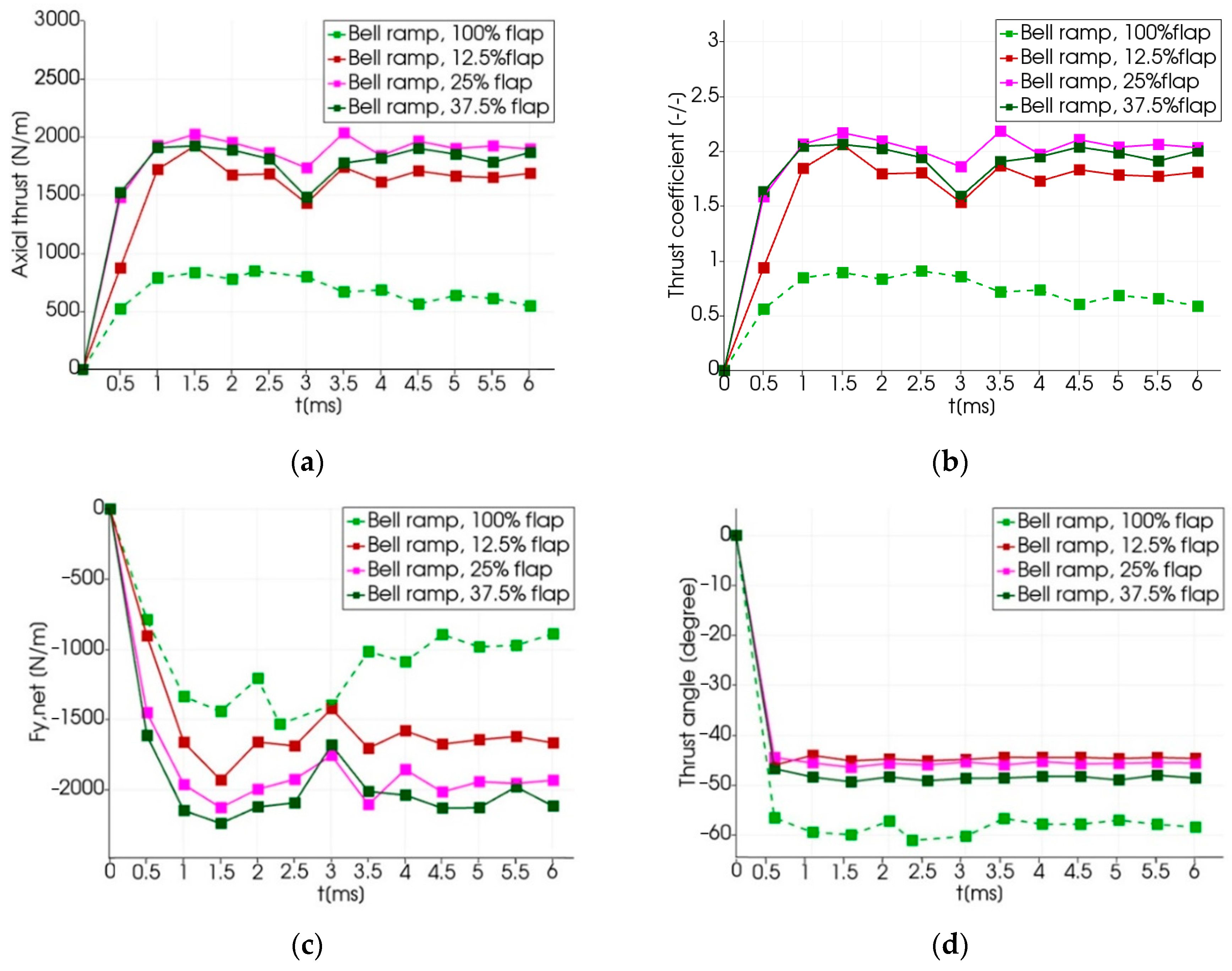
3.2.2. Analysis of Propulsion Performance of Bell-Shaped SERNs with Different Flap Lengths
Analysis of Propulsion Performance in RSS State between Conical-Shaped and Bell-Shaped Configurations with Equal Flap Length
4. Conclusions
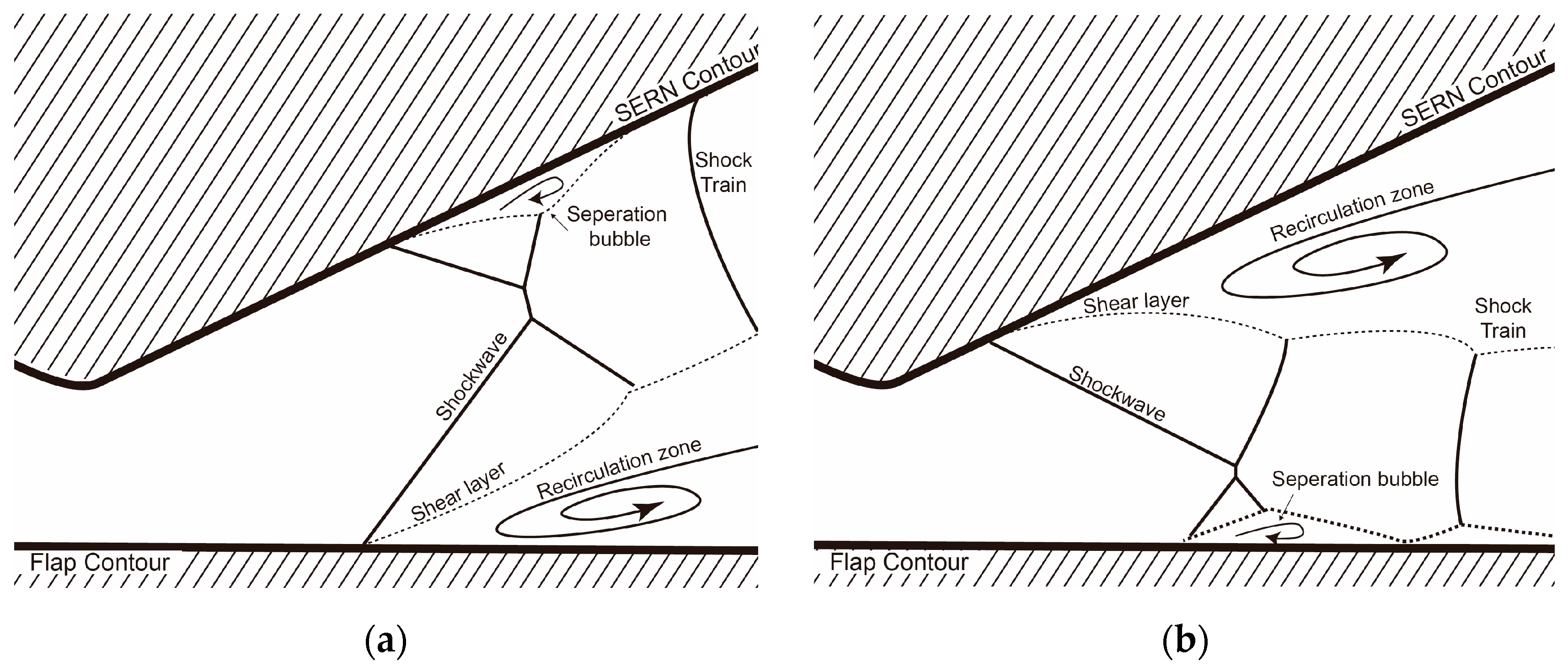
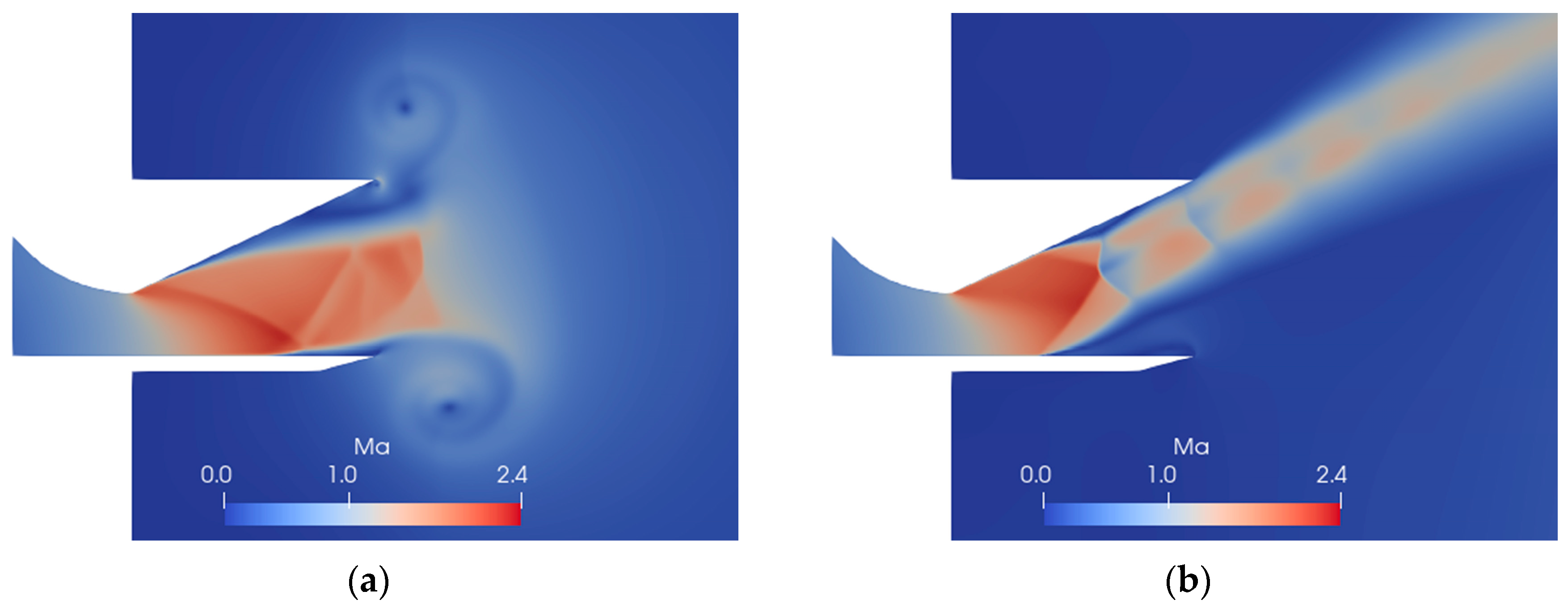
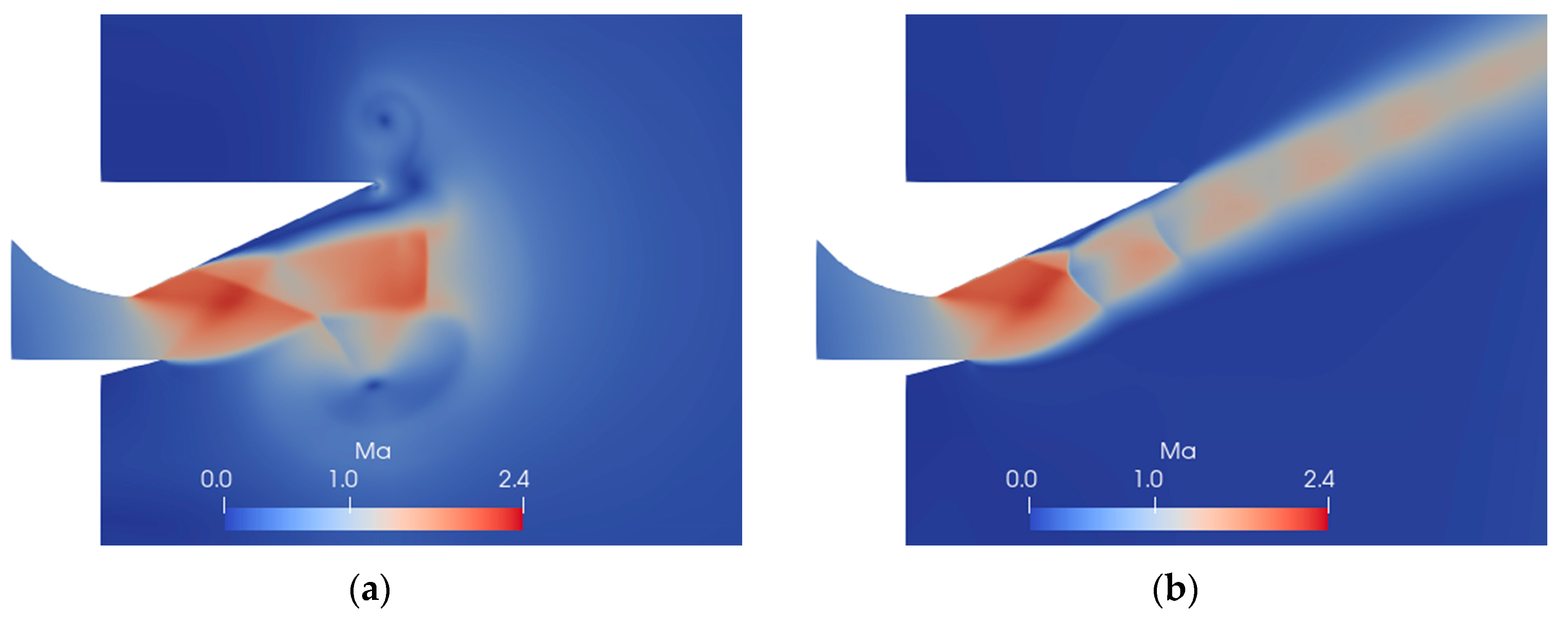
- The SERN configurations investigated in this research universally initiate with an FSS state, a consequence of the shockwave originating from the throat. This FSS state, while transient in nature under static conditions, evolves into a more stable RSS pattern due to the influence of viscous effects. Comparatively, the FSS state exhibits an elevated axial thrust and axial thrust coefficient and diminished vertical thrust magnitude and thrust angle magnitude, in contrast to the RSS state.
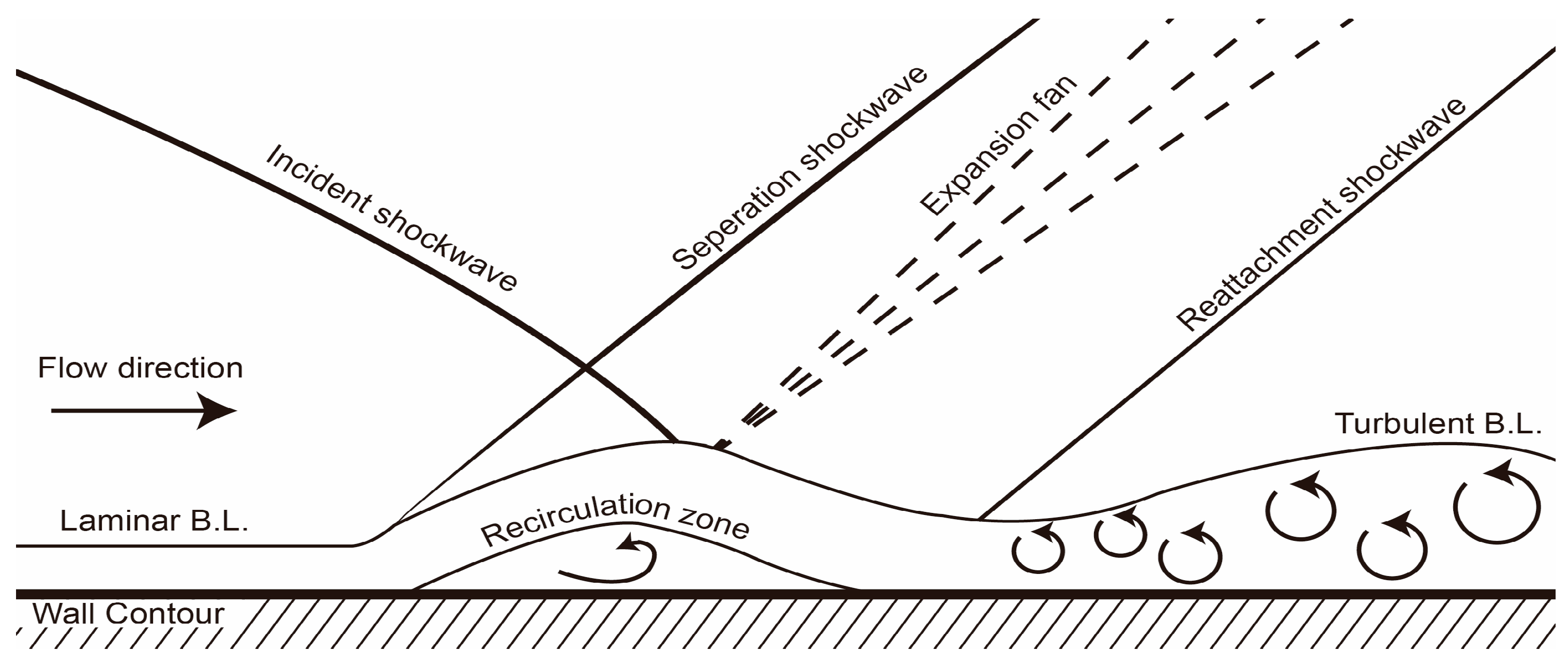
- In the static startup phase, a shockwave originates from the upper wall of the throat. Then, the shockwave occurs on the flap wall if the flap’s length permits; otherwise, it engages with the separation vortex. In cases where the shockwave interacts with the flap wall, this event characterizes the typical “incident shockwave”.
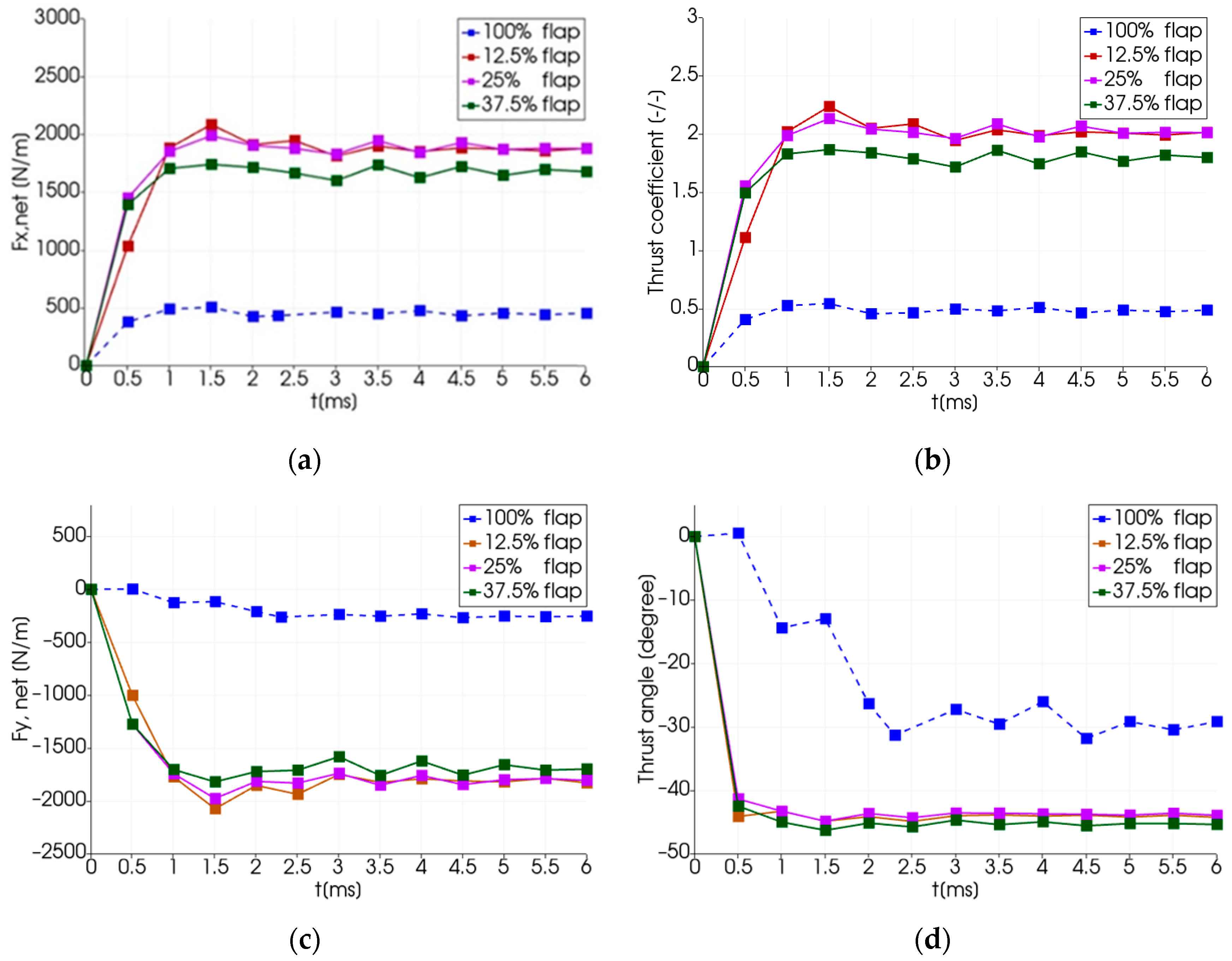
- The modified short flap configurations demonstrate accelerated separation speeds when compared to the original long flap configuration due to the emergence of a detachment vortex. A shorter flap is able to preclude backflow region creation and leads to a phenomenon akin to the attitude compensation seen in aerospike engines. Additionally, the total thrust is augmented, primarily due to an enlargement in the horizontal projection area of the thrust exit. However, this augmentation primarily amplifies the vertical net thrust and the thrust angle, with a 25° ramp potentially resulting in thrust angles of around −45°.
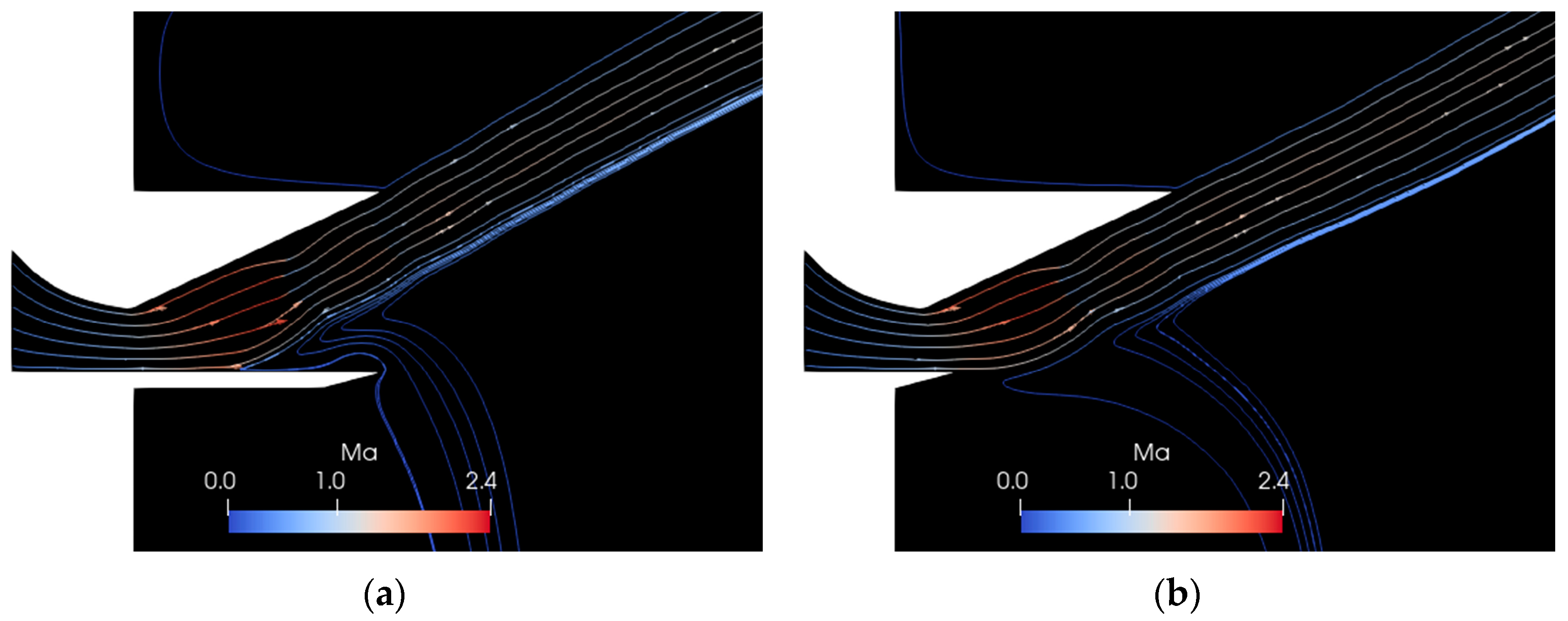
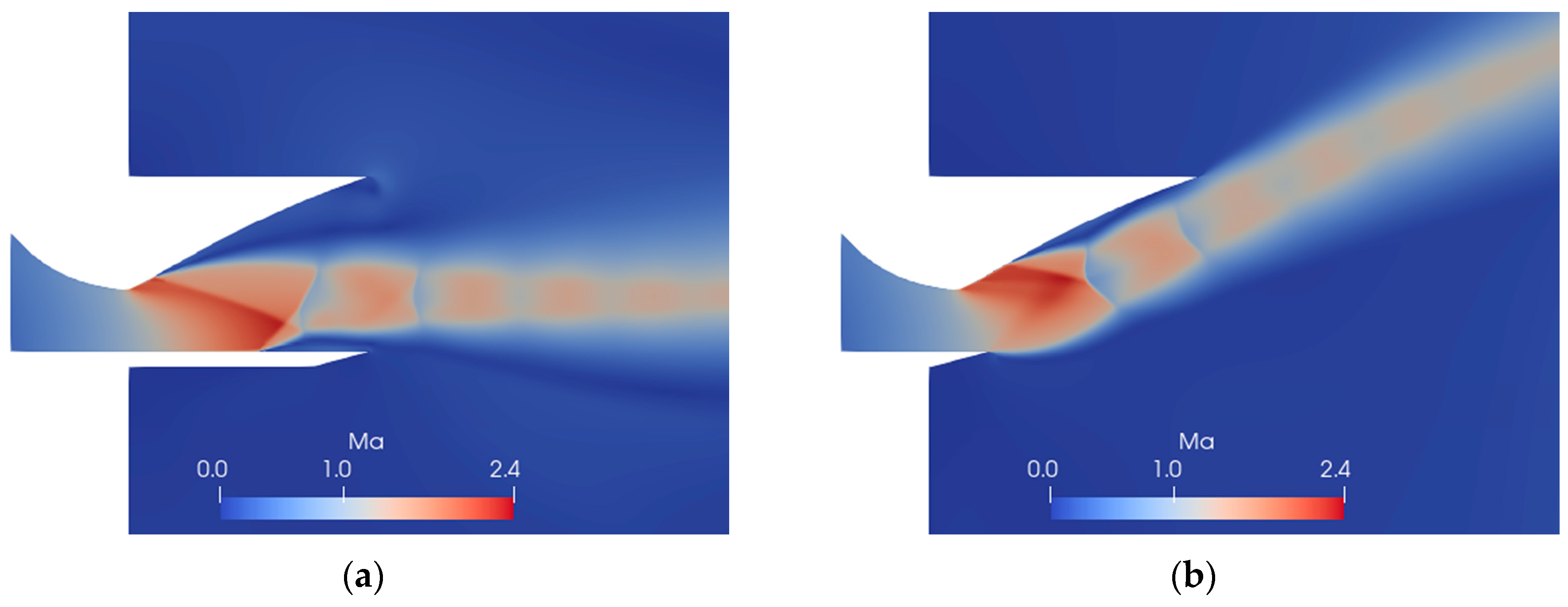
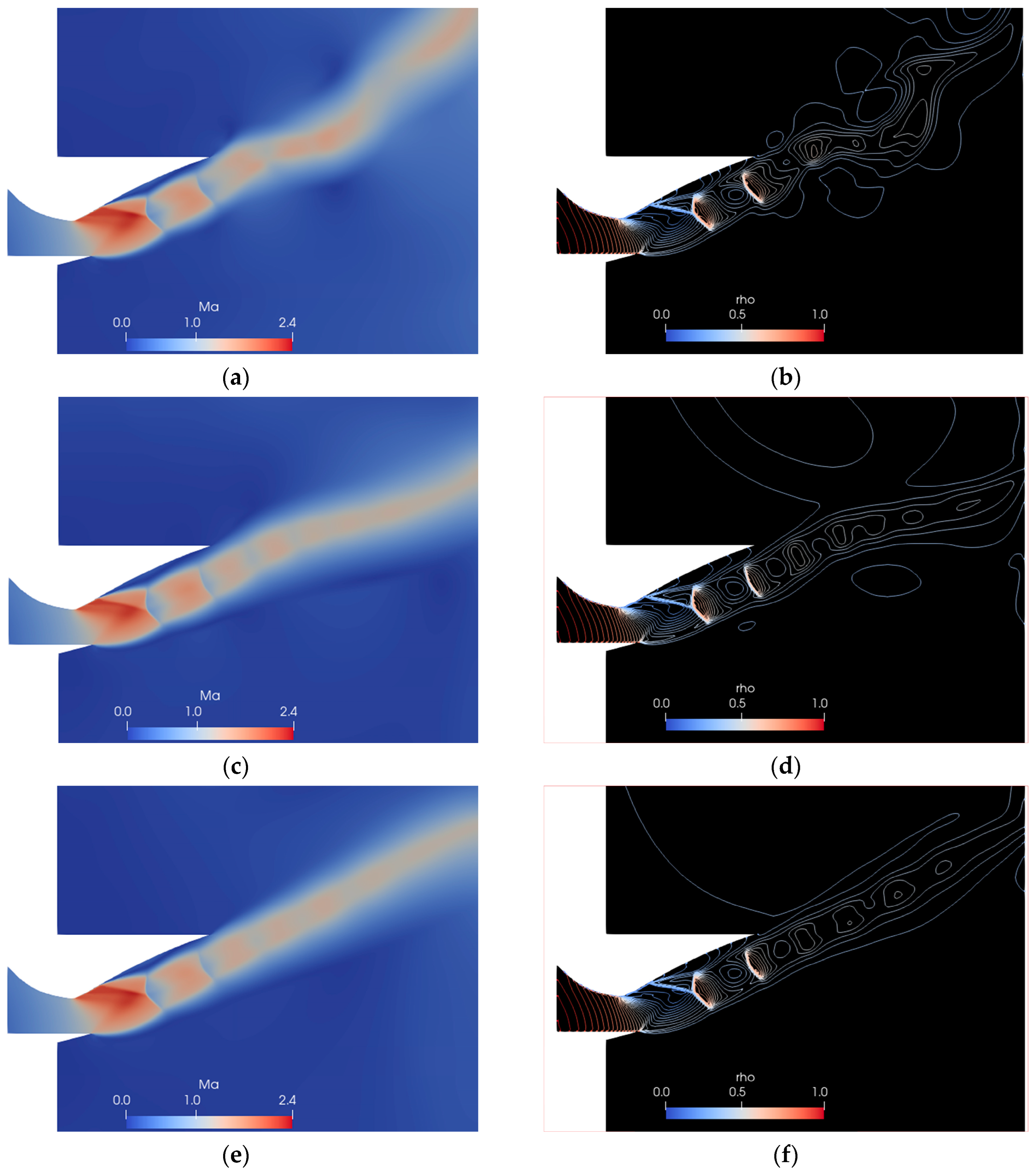
- Modifying the ramp profiles within this study yields three significant outcomes: Firstly, it is observed that altering the ramp profile can induce changes in the flow patterns during the steady state. Secondly, the introduction of a bell-shaped ramp profile tends to generate a larger separation bubble, particularly evident when the RSS(SERN) separation pattern occurs. Thirdly, while both conical-shaped and bell-shaped ramps display instances of jet bounce phenomena, the bell-shaped ramps exhibit a more pronounced bounce phenomenon.
- Both modifications involving shortening the flap and adjusting the bell-shaped ramp manifest similar effects, leading to an enhanced total thrust in over-expansion conditions. Nonetheless, most of the thrust enhancement is directed vertically. Furthermore, it is worth noting that flap shortening exhibits a more pronounced effect compared to the bell-shaped modification.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Seleznev, R.K. History of Scramjet Propulsion Development. In Proceedings of the Journal of Physics: Conference Series, Moscow, Russia, 21–24 November 2017; Institute of Physics Publishing: Bristol, UK, 4 May 2018; Volume 1009. [Google Scholar]
- Drummond, J.P.; Bouchez, M.; Mcclinton, C.R. Chapter 1: Overview of NATO Background on Scramjet Technology; NATO Science and Technology Organization: Laspezia, Italy, 2010. [Google Scholar]
- Urzay, J. Annual Review of Fluid Mechanics Supersonic Combustion in Air-Breathing Propulsion Systems for Hypersonic Flight. Annu. Rev. Fluid Mech. 2018, 50, 593–627. [Google Scholar] [CrossRef]
- Li, R.; Xu, J.; Yu, K.; Lv, Z.; Cheng, K. Design and Analysis of the Scramjet Nozzle with Contact Discontinuity. Aerosp. Sci. Technol. 2021, 113, 106695. [Google Scholar] [CrossRef]
- Yu, Y.; Xu, J.; Mo, J.; Wang, M. Principal Parameters in Flow Separation Patterns of Over-Expanded Single Expansion Ramp Nozzle. Eng. Appl. Comput. Fluid Mech. 2014, 8, 274–288. [Google Scholar] [CrossRef]
- Yu, K.; Chen, Y.; Huang, S.; Xu, J. Inverse Design Method on Scramjet Nozzles Based on Maximum Thrust Theory. Acta Astronaut. 2020, 166, 162–171. [Google Scholar] [CrossRef]
- Yu, K.; Xu, J.; Lv, Z.; Song, G. Inverse Design Methodology on a Single Expansion Ramp Nozzle for Scramjets. Aerosp. Sci. Technol. 2019, 92, 9–19. [Google Scholar] [CrossRef]
- Ridgway, A.; Sam, A.A.; Pesyridis, A. Modelling a Hypersonic Single Expansion Ramp Nozzle of a Hypersonic Aircraft through Parametric Studies. Energies 2018, 11, 3449. [Google Scholar] [CrossRef]
- Houghton, E.L.; Carpenter, P.W.; Collicott, S.H.; Daniel, T. Valentine Aerodynamics for Engineering Students, 6th ed.; Elsevier: Amsterdam, The Netherlands, 2016; ISBN 9780080966328. [Google Scholar]
- Ligrani, P.M.; McNabb, E.S.; Collopy, H.; Anderson, M.; Marko, S.M. Recent Investigations of Shock Wave Effects and Interactions. Adv. Aerodyn. 2020, 2, 4. [Google Scholar] [CrossRef]
- Gaitonde, D.V. Progress in Shock Wave/Boundary Layer Interactions. Prog. Aerosp. Sci. 2015, 72, 80–99. [Google Scholar] [CrossRef]
- OpenFOAM v6 User Guide. Available online: https://doc.cfd.direct/openfoam/user-guide-v6/contents (accessed on 31 July 2021).
- Kurganov, A.; Noelle, S.; Petrova, G. Semi-Discrete Central-Upwind Schemes for Hyperbolic Conservation Laws and Hamilton-Jacobi Equations. Soc. Ind. Appl. Math. 2001, 23, 1461–1488. [Google Scholar]
- Greenshields, C.J.; Weller, H.G.; Gasparini, L.; Reese, J.M. Implementation of Semi-Discrete, Non-Staggered Central Schemes in a Colocated, Polyhedral, Finite Volume Framework, for High-Speed Viscous Flows. Int. J. Numer. Methods Fluids 2010, 63, 1–21. [Google Scholar] [CrossRef]
- Shieh, T.H.; Li, M.R.; Li, Y.T. Study of New Accurate Supplementary Energy Modeling With Multi-Components Based on Newly Developed High Resolution Scheme. Int. Commun. Heat Mass Transf. 2019, 107, 121–140. [Google Scholar] [CrossRef]
- Nessyahu, H.; Tadmor, E. Non-Oscillatory Central Differencing for Hyperbolic Conservation Laws. J. Comput. Phys. 1990, 87, 408–463. [Google Scholar] [CrossRef]
- Gruhn, P. Einfluss Einer Heckklappe Die Düsenströmung Im Hyperschall. Ph.D. Dissertation, Rheinisch-Westfälischen Technischen Hochschule Aachen, Aachen, Germany, 2004. [Google Scholar]
- Naveen Kumar, K.; Gopalsamy, M.; Antony, D.; Krishnaraj, R.; Viswanadh, C.B.V. Design and Optimization of Aerospike Nozzle Using CFD. In Proceedings of the IOP Conference Series: Materials Science and Engineering, Coimbatore, India, 3–4 March 2017; Institute of Physics Publishing: Bristol, UK, 16 October 2017; Volume 247. [Google Scholar]
- Rao, G.V.R. Exhaust Nozzle Contour for Optimum Thrust. J. Jet Propuls. 2012, 28, 377–382. [Google Scholar] [CrossRef]
- Lee, C.; Choi, K.; Kim, C.; Han, S. Computational Investigation of Flow Separation in a Thrust-Optimized Parabolic Nozzle during High-Altitude Testing. Comput. Fluids 2020, 197, 104363. [Google Scholar] [CrossRef]
- Niezdodka, J. Druckverteilungsmessungen zur Simulation der Interferenz des Triebwerksstrahls Auf das Heck der Sänger-Unterstufe; DLR-WT-WK: Cologne, Germany, 1993. [Google Scholar]
- Esch, T.; Bauer, A.; Rick, H. Simulation and Nozzle/Afterbody Integration of Hypersonic Propulsion Systems. Z. Flugwiss. Weltraumforsch. 1995, 19, 19–28. [Google Scholar]
- Weinand, K. Numerische Berechnung der Strömung in Einem Windkanalheckteilmodell Mit Einem Finite-Elemente-Verfahren; University Aachen: Aachen, Germany, 1994. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Boundary Conditions | Velocity (m/s) | Pressure (Pa) | Temperature (K) |
|---|---|---|---|
| Freestream inlet | = 0 | 7100 | 55.7 |
| Freestream outlet | “waveTransmissive” | 7100 | 55.7 |
| Nozzle inlet | “zeroGradient” | 350,500 | 269.3 |
| Wall | “zeroGradient” | “zeroGradient” |
| Boundary Name | Velocity (m/s) | Pressure (Pa) | Temperature (K) |
|---|---|---|---|
| Nozzle inlet | “zeroGradient” | “zeroGradient” | “zeroGradient” |
| Freestream outlet | “waveTransmissive” | “waveTransmissive” | “waveTransmissive” |
| Freestream inlet | “slip” | “zeroGradient” | “zeroGradient” |
| Case | Coarse Mesh | Medium Mesh | Fine Mesh |
|---|---|---|---|
| Mesh number | 35,076 | 130,414 | 524,445 |
| Case | Coarse Mesh | Medium Mesh | Fine Mesh |
|---|---|---|---|
| Mesh number | 60,278 | 183,563 | 646,718 |
| Category | Case | Shape of the Nozzle | Length of the Nozzle |
|---|---|---|---|
| Verification configuration | Mesh verification configuration 1 | Bell-shaped | The same as the reference [17] |
| Mesh verification configuration 2 (Conical, 100% flap length configuration) | 40.46 mm [5] | ||
| Research configuration | Conical, 12.5% flap length configuration | 5.0575 mm | |
| Conical, 25% flap length configuration | 60% proportion bell-shaped | 10.115 mm | |
| Conical, 37.5% flap length configuration | 15.1725 mm | ||
| Bell-shaped, 100% flap length configuration | 40.46 mm |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shieh, T.-H.; Lin, K.-W.; Li, Y.-T. Flow Effects and Propulsion Performance on Various Single Expansion Ramp Nozzle Configurations of Scramjet Engine. Symmetry 2024, 16, 1044. https://doi.org/10.3390/sym16081044
Shieh T-H, Lin K-W, Li Y-T. Flow Effects and Propulsion Performance on Various Single Expansion Ramp Nozzle Configurations of Scramjet Engine. Symmetry. 2024; 16(8):1044. https://doi.org/10.3390/sym16081044
Chicago/Turabian StyleShieh, Tzong-Hann, Kuei-Wen Lin, and Yu-Tso Li. 2024. "Flow Effects and Propulsion Performance on Various Single Expansion Ramp Nozzle Configurations of Scramjet Engine" Symmetry 16, no. 8: 1044. https://doi.org/10.3390/sym16081044