
The Properties of Structures with Two Planes of Symmetry



1
Department of Mechanical Engineering, Transilvania University of Brasov, B-dul Eroilor, 29, 500036 Brașov, Romania
2
Technical Sciences Academy of Romania, B-dul Dacia, 26, 030167 Bucharest, Romania
*
Author to whom correspondence should be addressed.
Symmetry 2024, 16(8), 1075; https://doi.org/10.3390/sym16081075
Submission received: 14 July 2024
/
Revised: 4 August 2024
/
Accepted: 13 August 2024
/
Published: 20 August 2024
(This article belongs to the Special Issue Applications Based on Symmetry/Asymmetry in Structural Dynamics)
Abstract
:In the domain of civil engineering, the structures encountered usually present symmetries of different types. The causes that determine the use of these symmetries are diverse, starting from esthetic motivations but also dictated by practical reasons, such as the reduction in construction time and costs. These geometric symmetries lead to specific properties that, in certain situations, can help to simplify the calculation of these structures. They can be identified both in the static analysis and the deformability of the structure, as well as in the dynamic analysis in the study of vibrations. If these properties are used, it is possible to reduce the analysis time, and the designer can obtain a quick estimate of the behavior of the structure. Starting from these considerations, this work will determine some of the properties specific to the natural vibrations of certain structures with identical parts in their components (structures that present two planes of symmetry) and will demonstrate how these properties can contribute to reducing the time required for dynamic analysis. An example will be used to exemplify the presented methods. This work allows for further developments and makes possible the development of the existing finite element software by adding some modules to identify such situations by analyzing the input data and using the properties described in the newly introduced algorithms.
1. Introduction
Symmetry occurs in the real world in almost all areas of life. In engineering, it often happens that the systems we operate with have identical parts or different types of symmetry.
In the field of civil engineering, symmetries have played an important role since the beginning of the development of this industry, being frequently encountered in all types of buildings and constructions. In modern constructions, symmetries have become a common element and are often used in structures with large roofs or other modern facilities. We can find them in warehouses, exhibition halls, stadiums, performance halls or those for sports competitions, train stations, airports, etc. The use of these symmetries from the design stage offers numerous advantages to builders [1]. From the designer’s point of view, an analysis is performed on the substructures, reducing the design and calculation time [2]. For example, in static analysis, it has been known for a long time that for the resistance of materials, the strain and stress analysis can be performed; for the case of symmetrical structures, only half of the structure requires analysis while paying attention to the boundary conditions introduced. Obviously, the number of operations and the calculation time are reduced by more than half in these cases. Users of the finite element method (FEM) have long noticed these advantages and used them empirically in their applications.
To realize a building with symmetric parts, the number of different construction elements used decreases. Logistical and labor costs also decrease. An analysis of the vibrations of such a structure used in construction can be performed more easily, faster, and with a low computational effort [3,4]. So, in the end, the costs are low.
The information needed to define a system with symmetries is less. This implies a reduction in design effort and the volume of calculations required and facilitates static and dynamic analysis [5]. The advantages of using symmetries and the properties that certain systems with symmetries have were presented by a specialized study [6]. But in general, these observations focused more on the mathematical formalism that is simplified by the existence of symmetries and on the way in which they can obtain, with less effort, the equations of motion. Obviously, symmetries can appear in all industrial branches, such as automotive, aerospace, and transport engineering, where a product can have symmetrical, identical, or repetitive parts. The aeronautical industry has long noticed the existence of identical parts in the construction of an aircraft and uses in the design stage the condensation and analysis of some substructures of the main project, thus saving design time and cost. In this way, it is easier to approach the entire structure [7]. The analysis of free and forced vibrations of such a system will finally provide a system of differential equations. Solving it will give us a dynamic answer. Taking symmetries into account makes it easier to obtain the dynamic response [8].
The modern solutions offered by civil engineering for the coverage of large spaces, such as warehouses, exhibition halls, stadiums, concert halls, or other modern buildings, are layered spatial networks (two or three-layer configurations). They show a high degree of symmetry, both at the modular level and at the overall level. In [9], such an analysis is conducted using a group theoretical approach to the study of vibrations.
On a human level, symmetry provides a sense of harmony and balance and is sought after by human beings. It is expressed in the case of construction by the distribution of building parts and bodies and the surrounding spaces [10]. The concretization of the ideas of symmetry in a certain period of time is determined by the cultural influences and trends of the period. In the construction of structures, its role is well defined. Thus, it was found that a building with symmetries tends to be more stable in response to various anthropic activities or natural phenomena. Obviously, such a construction is more attractive to the eye and has esthetic qualities. But at the same time, it offers specific properties of the system that make the calculation easier [11]. There are studies concerning different aspects of the problem and the mathematical aspects are presented in [12,13,14]. The study of a multilevel structure is presented in [15]. The results concerning engineering aspects of symmetry can be found in [16].
In construction practice, different types of symmetries are used, such as bilateral symmetry, rotational symmetry, chiral symmetry, and axial symmetry [17,18,19]. This paper will deal with cases of bilateral symmetry, which is present in structures with identical halves along an axis. This type of symmetry is widely found in the construction of buildings (i.e., the Taj Mahal mosque). The axis of symmetry can be horizontal or vertical.
The concept of symmetry, widespread in all fields of human knowledge, is used in common practice in two senses. The first approach to symmetries refers to the esthetic aspect of an object, buildings, and cars. Proportionality and harmony are analyzed as human beings naturally and instinctively seek symmetry in nature. There is, however, a practical engineering aspect that uses geometric or other regularities to facilitate certain design, calculation, and product manufacturing activities, or to provide simple explanations in the description of a process/pattern of repetition in an activity or within a certain phenomenon. Simply explained, symmetry is equivalent to harmony in the dimensions, proportions, and arrangement of objects [20,21,22,23,24,25,26,27,28].
In this paper, the properties of the equations of motion of systems with multiple symmetries will be presented, properties that can lead to easing the effort required for the dynamic analysis of such structures. An application of the calculation of a chiller support structure will illustrate the results obtained.
2. Methods
Let us consider a mechanical system with elastic elements and damping subject to external loads. The equations of motion of such a structure have the following classical form [29,30]:
Let us now consider a mechanical system that can be subjected to vibrations and that is made up of two identical parts attached to a third (Figure 1).
The equations of motion for the systems (left, right) and the system taken independently are as follows:
A more detailed explanation of the writing of the motion equations is provided in [31]. The vectors and represent the external forces applied to the systems and . For the entire system, if the links between the three mechanical systems are also taken into account, the equations of motion become as follows:
where:
- —the inertial matrix for the subsystems ;
- —the inertial coupling matrix between the two identical parts and the system ;
- —the inertial matrix for the subsystem ;
- —the stiffness matrix for the subsystems ;
- —the stiffness coupling matrix between the two identical parts and the system ;
- —the stiffness matrix for the subsystem ;
- —the damping matrix for the subsystems ;
- —the damping coupling matrix between the two identical parts and the system ;
- —the damping matrix for the subsystem ;
- —the vector of independent coordinates for the subsystem on the left side;
- —the vector of independent coordinates for the subsystem on the right side;
- —the vector of independent coordinates for the subsystem .
The system of equations of undamped free vibrations is as follows:
If we denote with p the eigenvalue, considering Equation (6), solving the eigenvalue problem comes down to solving the following characteristic equation:
For the substructure , the eigenvalue problem comes back to solving the following characteristic equation:
In the following, fundamental results regarding such systems are presented in a unitary form [32,33]. The main result regarding such systems is the following.
Let us consider the most general case with a matrix made up of matrices with complex coefficients of size n, denoted as A and Z = On; the square matrix is C, and the matrices B and L are chosen so that the matrix M is square:
In this case, det(M) is divisible by det(A). A demonstration of the result is presented in [34]. So, really, in our case, having the system with two identical systems in the component shows that the eigenvalues of one of the identical systems are found among the eigenvalues of the whole system. Then, in the next step, we have two identical systems + , and the result is repeated. From this result, the following conclusions are immediately obtained in such cases:
P1. The eigenvalues for a half structure are also the eigenvalues for the whole structure. (This result was argued in the sentence above.)
P2. For identical eigenvalues for half of the structure and for the whole structure, the eigenmodes are of the following form:
(The eigenmodes corresponding to the identical parts are skew-symmetric.)
P3. For the other eigenvalues, the eigenvectors are of the following form:
(For the other eigenvalues of the system, the components of the eigenmodes corresponding to the identical parts are identical).
In the following, the presented properties will be expanded for systems that present two levels of bilateral symmetry (Figure 2).
for the left side and for the right half, the equation is as follows:
If we consider the structure formed by two such substructures and if we neglect the structural damping and other types of proportional damping that may occur, then the equations of motion of the free vibrations are as follows:
where, if we also take into account the second level of symmetry, existing on the left and right sides of the mechanical system, the following is noted:
The modeling of the two systems was performed in this paper using the finite element method (FEM). The program used for the calculation was ABAQUS.
After a reordering of the equations so that the quantities associated with the systems , , and appear in the first positions, the motion equations are of the form of Equation (1), where the matrices that intervene in the equations are as follows:
The characteristic equation for this mechanical system is as follows:
or
For ease of calculations, we note the following:
With these notations, the systems of Equations (20)–(26) become as follows:
Theorem 1.
If an eigenvalue for the system is also an eigenvalue for , then the eigenvector associated with this eigenvalue is of the following form:
Proof.
If , it can be found (eigenvector for system ) such that
In this case, the first system, Equation (27), becomes as follows:
Adding Equation (27) with Equation (28) gives the following:
If the conditions in (36) are taken into account, it results in the following:
from which the following is immediately obtained:
A similar reasoning for Equations (29) and (30) leads us to the following relation:
Equations (31) and (32) become
If Equation (42) is subtracted from Equation (41), we obtain the following:
Because, in general, when , it results in the following:
Adding (1), (2), (3), and (4), we obtain the following:
where
Inserting this into Equation (33) and because, in general, , it is immediately obtained that
Thus, the eigenmode of vibration will have the following form:
□
Theorem 2.
If the eigenpulsations are different from the eigenpulsations of the (S1) system, then the eigenvectors corresponding to these eigenpulsations have the following particular form:
Proof.
Subtracting Equation (28) from Equation (27) yields
Whence, since , it results in the following:
So,
Subtracting Equation (30) from Equation (29) yields
Its analogue is as follows:
Eliminating and from Equations (27)–(33), the system can be reduced to the following:
From Equations (55) and (56), it follows, successively, that
and
Inserting this into Equations (57) and (58), we obtain the following:
Subtracting Equations (62) and (63) gives
or
wherefrom
Entering these results into Equations (60) and (61), you immediately obtain the following:
Then, the corresponding eigenvector is made by Equation (49). □
3. Results
In what follows, we will study a metallic structure made up of a system of bars whose dimensions are shown below and which presents two planes of symmetry (Figure 3) realized to support a system of air conditioning. In what follows, a real structure, which is intended to support a chiller from a building complex, is analyzed from the point of view of the previously mentioned properties. The structure is made up of a series of four types of trusses welded together. The dimensions of the different parts of the structure are shown in Figure 3. The entire structure has 24 nodes connecting 56 bars. There are two median planes of the figure that connect two identical mirror substructures.
The dimensions are as follows:
- -
- The lower sole and the upper sole of the lattice beams are made of hot-rolled square pipe with a section of 30 × 2 mm;
- -
- The uprights—hot-rolled square pipe with a section of 20 × 2 mm;
- -
- The diagonals—hot-rolled square pipe with a section of 20 × 2 mm;
- -
- The uprights at the ends of the beams with lattices that also fulfill the role of pillars are made of hot-rolled square pipe with a section of 40 × 2.5 mm;
- -
- The other elements are made of laminated profiles with the U65 section.
All elements were made of S235JR steel and assembled by welding performed on the entire contact surface of the parts.
The air conditioning unit was placed on the metal structure and was attached to it with threaded assemblies.
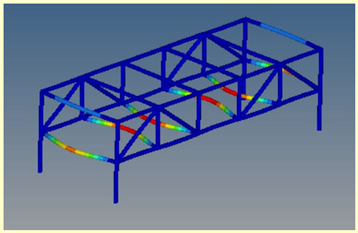
FEM is used to determine the natural frequencies and natural modes of vibration. For this system, a calculation of the natural frequencies and natural modes of vibration is made. It is noted that we are dealing with two types of modes: symmetric modes and antisymmetric modes. The two types of modes are due to the symmetry of the system, as was shown in the theoretical part.
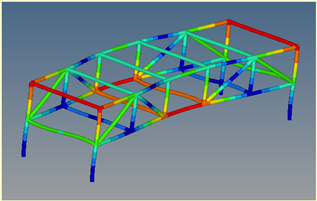
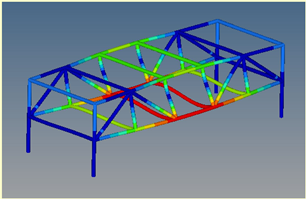
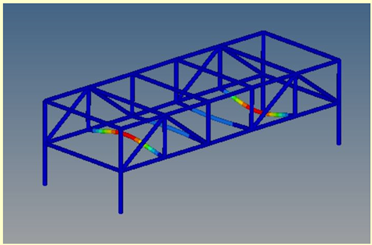
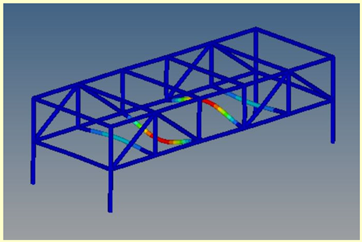
Four cases will be analyzed in the following: the whole structure, then two substructures obtained by sectioning with a plane of symmetry the assembly, and finally, a quarter of the structure that can be obtained by sectioning with a plane of symmetry one of the two considered substructures (see Figure 4).
The eigenfrequencies are determined and presented for all four cases in Table 1.
In Table 1, the properties presented in Section 2 can be identified. So, if it is considered a half structure with the symmetry plane yOz (called Half X), all 20 eigenfrequencies calculated can be found among the eigenfrequencies of the whole structure. This property remains valid, too, for the second type of half structure (called Half Z) with the symmetry plan xOy. If it is considered now a quarter of the structure, at the second level of symmetry, it is easy to observe that the eigenfrequencies of the quarter structure can be found among the frequencies of the Half X, Half Z, and full structures. If the representation of the eigenmodes of vibration is analyzed, it is possible to see that Theorems 1 and 2 are respected. So, the calculations made validate our theoretical results.
Based on Table 1, a representation of the natural modes of vibration for the symmetric modes is presented in Table 2. In Table 2, the first column presents the eigenmodes of the entire system that have a counterpart in the parts of the structure considered separately. Columns 2, 3, and 4 present the coincident modes from the considered substructure parts.
4. Discussion
In this paper, the FEM was used for the calculation of the natural frequencies and natural modes of vibration for a real structure of a cooling installation made in the physics department. The studied mechanical system is a system made up of four types of standardized bars rigidly connected to each other by welding. For the presented and physically realized system, a calculation of the natural vibration frequencies and natural vibration modes was made. During the analysis, it was found that we are dealing with two types of vibration modes: symmetric modes and skew-symmetric modes. The two types of modes are in accordance with the properties shown. Experimental results that confirm similar calculations made can be found in [35].
The types of finite elements used, the mechanical properties of the elements used, and the way of joining between elements can lead to (generally insignificant) variations in the value of the natural frequencies. However, these do not qualitatively influence the presented results. The accuracy of the numerical calculations can be rated as excellent, because when calculating the frequencies on the entire structure and on the component substructures, we obtain, in most cases, up to six significant figures.
5. Conclusions
Symmetries mean that the different parts of a construction are identical. The information required for the identification of the respective part is reduced in this way, and as a consequence, there is an economic aspect to the analysis, design, and manufacture of the respective part. Logistic expenses also decrease due to having a smaller number of different parts. The design stage of such structures becomes simpler, the necessary calculations are reduced in volume, and the costs necessary to complete such projects decrease. For the field of study of a vibrating structure, which is the object of this work, the advantages that appear are significant. It is possible to reduce the calculation effort, with the consequence of reducing the necessary time and costs. It is possible to perform the calculation on halves of the structure, eliminate the known eigenvalues from the characteristic equation, and determine the unknown ones from a simpler equation, with less effort.
In the present work, several properties were presented that refer to systems with multiple symmetries. We presented and justified some of the important vibration properties that symmetrical mechanical systems have. Only a symmetrical part of the system can be analyzed (which means reduced calculations in the first phase), and then, the eigenfrequencies thus determined are removed from the general equations of the system’s vibrations. Then, a reduced system is analyzed to determine the other eigenfrequencies. So, in the end, there is a significant saving of time, potentially leading to cost savings on several levels.
In the end, the obtained results could be used by software developers to identify systems that present symmetries and to modify the calculation algorithm so that these symmetries can be used to reduce the necessary calculation time. For structural applications, where the calculation time is high, the advantages offered can be significant.
Author Contributions
Conceptualization, S.V. and C.I.; methodology, S.V. and C.I.; software, C.I.; validation, S.V. and C.I.; formal analysis, S.V. and C.I.; investigation, S.V. and C.I.; resources, S.V.; data curation, C.I.; writing—original draft preparation, S.V.; writing—review and editing, S.V.; visualization, S.V. and C.I.; supervision, S.V. and C.I.; project administration, S.V. and C.I.; funding acquisition, S.V. and C.I. All authors have read and agreed to the published version of the manuscript.
Funding
The APC was funded by Transilvania University of Brasov. HBS 2536/2024.
Data Availability Statement
The data are contained within the article.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Meirovitch, L. Analytical Methods in Vibrations; McMillan: New York, NY, USA, 1967. [Google Scholar]
- Den Hartog, J.P. Mechanical Vibrations; Dover Publications: Mineola, NY, USA, 1985. [Google Scholar]
- Douglas, T. Structural Dynamics and Vibrations in Practice: An Engineering Handbook; CRC Press: Boca Raton, FL, USA, 2012. [Google Scholar]
- Vlase, S.; Marin, M.; Öchsner, A. Considerations of the transverse vibration of a mechanical system with two identical bars. Proc. Inst. Mech. Eng. Part L J. Mater. Des. Appl. 2019, 233, 1318–1323. [Google Scholar] [CrossRef]
- Lin, J.; Jin, S.; Zheng, C.; Li, Z.M.; Liu, Y.H. Compliant assembly variation analysis of aeronautical panels using unified substructures with consideration of identical parts. Comput.-Aided Des. 2014, 57, 29–40. [Google Scholar] [CrossRef]
- Shi, C.Z.; Parker, R.G. Modal structure of centrifugal pendulum vibration absorber systems with multiple cyclically symmetric groups of absorbers. J. Sound Vib. 2013, 332, 4339–4353. [Google Scholar] [CrossRef]
- Celep, Z. On the axially symmetric vibration of thick circular plates. Arch. Appl. Mech. 1978, 47, 411–420. [Google Scholar] [CrossRef]
- Elkin, V.I. General-Solutions of Partial-Differential Equation Systems with Identical Principal Parts. Differ. Equ. 1985, 21, 952–959. [Google Scholar]
- Zingoni, A. On the symmetries and vibration modes of layered space grids. Eng. Struct. 2005, 7, 629–638. [Google Scholar] [CrossRef]
- Chen, Y.; Feng, J. Group-Theoretic Exploitations of Symmetry in Novel Prestressed Structures. Symmetry 2018, 10, 229. [Google Scholar] [CrossRef]
- Harth, P.; Beda, P.; Michelberger, P. Static analysis and reanalysis of quasi-symmetric structure with symmetry components of the symmetry groups C-3v and C-1v. Eng. Struct. 2017, 152, 397–412. [Google Scholar] [CrossRef]
- He, J.H.; Latifizadeh, H. A general numerical algorithm for nonlinear differential equations by the variational iteration method. Int. J. Numer. Methods Heat Fluid Flow 2020, 30, 4797–4810. [Google Scholar] [CrossRef]
- He, C.H.; Liu, C.; Gepreel, K.A. Low frequency property of a fractal vibration model for a concrete beam. Fractals 2021, 29, 2150117. [Google Scholar] [CrossRef]
- Bratu, P.; Nitu, M.C.; Tonciu, O. Effect of Vibration Transmission in the Case of the Vibratory Roller Compactor. Rom. J. Acoust. Vib. 2023, 20, 67–72. [Google Scholar]
- Rugina, C.; Sireteanu, T.; Chiroiu, V.; Munteanu, L.; Mitu, A.M. Experimental and Numerical Simulation of a Multilevel Structure Behaviour Subjected to Transient Loads. Rom. J. Acoust. Vib. 2023, 20, 147–156. [Google Scholar]
- Seeram, M.; Kumar, P. Free Vibration Analysis of Symmetric and Asymmetric RCC Structures. IOP Conf. Ser. Mater. Sci. Eng. 2023, 1273, 012010. [Google Scholar] [CrossRef]
- Itu, C.; Bratu, P.; Borza, P.; Vlase, S.; Lixandroiu, D. Design and Analysis of Inertial Platform Insulation of the ELI-NP Project of Laser and Gamma Beam Systems. Symmetry 2020, 12, 1972. [Google Scholar] [CrossRef]
- Negrean, I.; Crisan, A.V.; Vlase, S. A New Approach in Analytical Dynamics of Mechanical Systems. Symmetry 2020, 12, 95. [Google Scholar] [CrossRef]
- Sharma, A.K.; Bensal, S. Free Vibration Analysis of Square Structure Plate with Different Boundary Conditions. Rom. J. Acoust. Vib. 2023, 20, 100–106. [Google Scholar] [CrossRef]
- Li, B.J.; Zheng, X.Z.; Zhao, J. Vibration analysis of structures with rotation and reflection symmetry. Shock. Vib. 1996, 3, 303–311. [Google Scholar] [CrossRef]
- Grolet, A.; Malbos, P.; Thouverez, F. Eigenvalue Method with Symmetry and Vibration Analysis of Cyclic Structures. In Proceedings of the 16th International Workshop on Computer Algebra in Scientific Computing (CASC 2014), Warsaw, Poland, 8–12 September 2014; Volume 8660, pp. 121–137. [Google Scholar]
- Whiston, G.S. Use of Screw Translational Symmetry for the Vibration Analysis of Structures. Int. J. Numer. Methods Eng. 1982, 18, 435–444. [Google Scholar] [CrossRef]
- Olson, B.J.; Shaw, S.W. Vibration absorbers for a rotating flexible structure with cyclic symmetry: Nonlinear path design. Nonlinear Dyn. 2010, 60, 149–182. [Google Scholar] [CrossRef]
- Fagert, J.; Mirshekari, M.; Noh, H.Y. Structure- and Sampling-Adaptive Gait Balance Symmetry Estimation Using Footstep-Induced Structural Floor Vibrations. J. Eng. Mech. 2021, 147, 04020151. [Google Scholar] [CrossRef]
- Wang, L.J.; Zhao, J.; Meng, J.A. Study on the 2-Stage Amplitude Amplification of Ultrasonic Vibration Turning System with Symmetry Structure. Chin. Sci. Bull. 1992, 37, 428–431. [Google Scholar]
- Whalen, T.M.; Healey, T.J. Free vibration analysis of rotating nonlinearly elastic structures with symmetry: An efficient group-equivariance approach. Nonlinear Dyn. 1997, 13, 1–37. [Google Scholar] [CrossRef]
- Quaegebeur, S.; Di Palma, N.; Thouverez, F. Exploiting internal resonances in nonlinear structures with cyclic symmetry as a mean of passive vibration control. Mech. Syst. Signal Process. 2022, 178, 04020151. [Google Scholar] [CrossRef]
- Wang, S.Y.; Meesap, C. Investigation on Mesh and Sideband Vibrations of Helical Planetary Ring Gear Using Structure, Excitation and Deformation Symmetries. Chin. J. Mech. Eng. 2018, 31, 104. [Google Scholar] [CrossRef]
- Modrea, A.; Munteanu, V.M.; Pruncu, C.I. Using the Symmetries in the Civil Engineering: An overview. Procedia Manuf. 2020, 46, 906–913. [Google Scholar] [CrossRef]
- Caughey, T.K.; O’Kelly, M.E.J. Classical normal modes in damped linear dynamic systems. ASME J. Appl. Mech. 1965, 32, 583–588. [Google Scholar] [CrossRef]
- Vlase, S.; Itu, C.; Vasile, O.; Nastac, C.; Stanciu, M.D.; Scutaru, M.L. Vibration Analysis of a Mechanical System Composed of Two Identical Parts. Rom. J. Acoust. Vib. 2018, 15, 58–63. [Google Scholar]
- Vlase, S.; Marin, M.; Scutaru, M.L.; Munteanu, R. Coupled transverse and torsional vibrations in a mechanical system with two identical beams. AIP Adv. 2017, 7, 6. [Google Scholar] [CrossRef]
- Codarcea-Munteanu, L.; Marin, M.; Vlase, S. The study of vibrations in the context of porous micropolar media thermoelasticity and the absence of energy dissipation. J. Comput. Appl. Mech. 2023, 54, 437–454. [Google Scholar]
- Vlase, S.; Paun, M. Vibration analysis of a mechanical system consisting of two identical parts. Rom. J. Tech. Sci. Appl. Mech. 2015, 60, 216–230. [Google Scholar]
- Vasile, O.; Vlase, S.; Năstac, C.; Scutaru, M.L. Experimental Analysis of a Mechanical System Composed by Two Identical Parts. Acta Tech. Napoc. Ser. Appl. Math. Mech. Eng. 2018, 61, 333–338. [Google Scholar]
Figure 1.
A mechanical system with two identical parts.

Figure 2.
A mechanical system with two levels of symmetry.
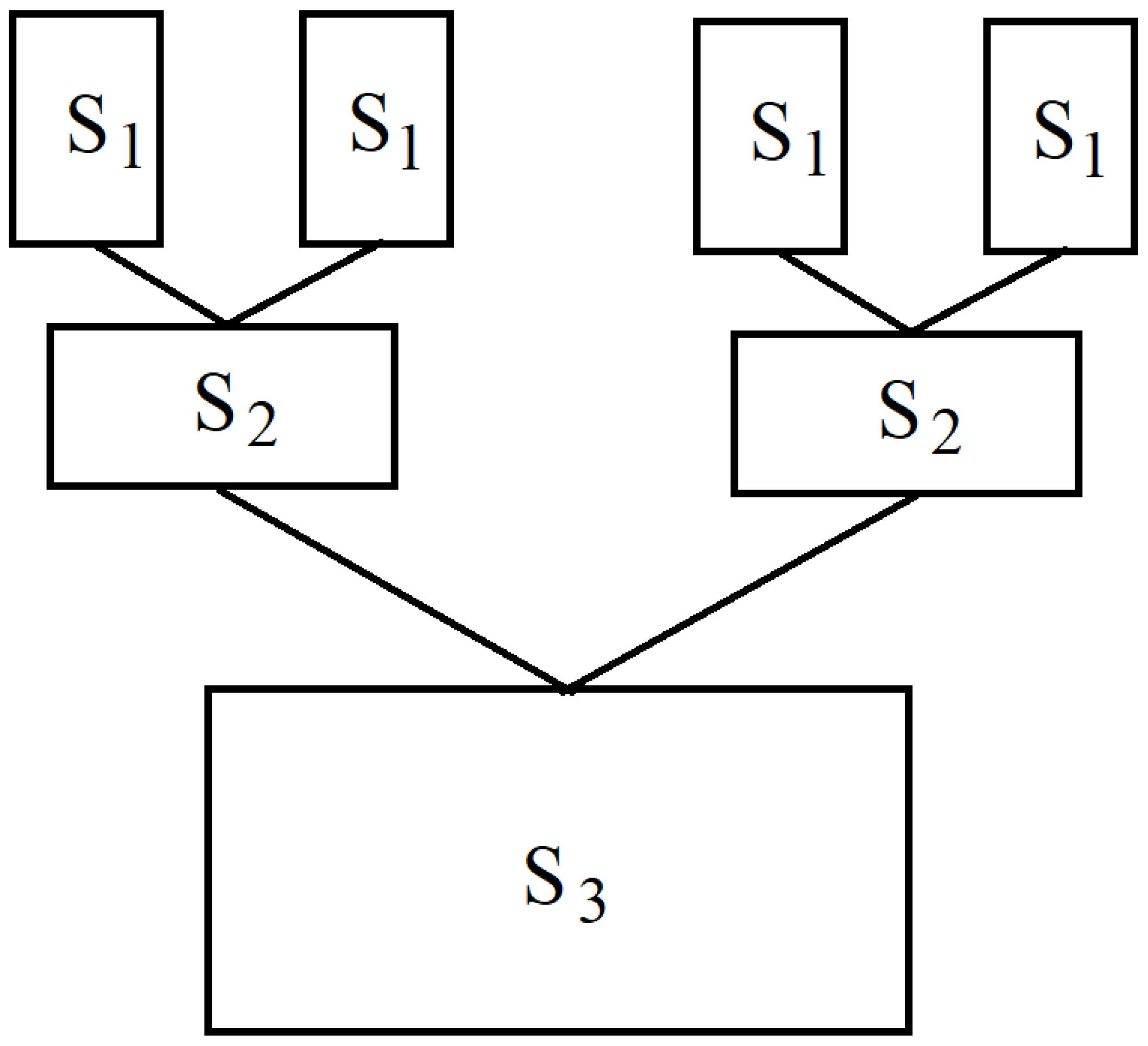
Figure 3.
Metallic structure: geometry and dimensions. The different type of bars are represented in different colors.
Figure 3.
Metallic structure: geometry and dimensions. The different type of bars are represented in different colors.
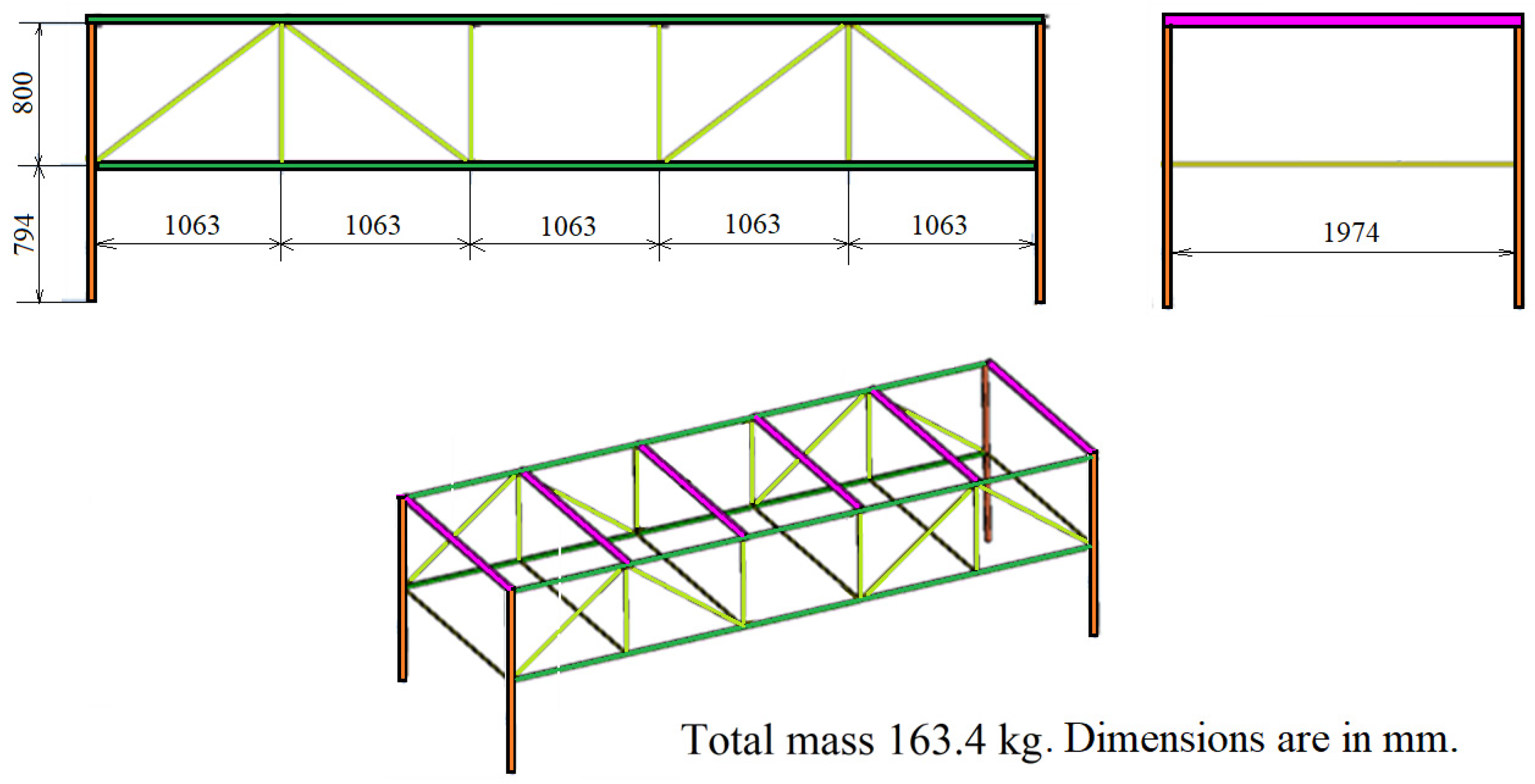
Figure 4.
Four studied cases: (a) full structure; (b) symmetry plane is Oyz; (c) symmetry plane is Oxy; (d) quarter structure.
Figure 4.
Four studied cases: (a) full structure; (b) symmetry plane is Oyz; (c) symmetry plane is Oxy; (d) quarter structure.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
The eigenfrequencies for the four considered cases.
| FULL | HALF_X | HALF_Z | QUARTER | ||||
|---|---|---|---|---|---|---|---|
| A1 | A2 | A3 | A4 | ||||
| Mode | Eigenfrequency [Hz] | Mode | Eigenfrequency [Hz] | Mode | Eigenfrequency [Hz] | Mode | Eigenfrequency [Hz] |
| 1 | 4.90 | 1 | 4.90 | ||||
| 2 | 9.29 | ||||||
| 3 | 10.74 | 1 | 10.74 | ||||
| 4 | 13.78 | 2 | 13.78 | ||||
| 5 | 16.37 | ||||||
| 6 | 16.87 | 3 | 16.87 | ||||
| 7 | 18.81 | 2 | 18.81 | ||||
| 8 | 19.70 | ||||||
| 9 | 22.60 | ||||||
| 10 | 23.50 | 4 | 23.50 | ||||
| 11 | 26.11 | ||||||
| 12 | 27.48 | 3 | 27.48 | 5 | 27.48 | 1 | 27.48 |
| 13 | 27.56 | ||||||
| 14 | 29.22 | 4 | 29.22 | ||||
| 15 | 29.89 | 5 | 29.89 | 6 | 29.89 | 2 | 29.89 |
| 16 | 31.00 | 6 | 31.00 | 7 | 31.00 | 3 | 31.00 |
| 17 | 31.00 | 7 | 31.00 | ||||
| 18 | 31.56 | 8 | 31.56 | ||||
| 19 | 32.17 | 9 | 32.17 | 8 | 32.17 | 4 | 32.17 |
| 20 | 32.54 | 9 | 32.54 | ||||
| 21 | 32.85 | 10 | 32.85 | ||||
| 22 | 33.01 | 11 | 33.01 | 10 | 33.01 | 5 | 33.01 |
| 23 | 33.96 | 12 | 33.96 | 11 | 33.96 | 6 | 33.96 |
| 24 | 34.17 | 13 | 34.17 | ||||
| 25 | 34.26 | 14 | 34.26 | 12 | 34.26 | 7 | 34.26 |
| 26 | 34.26 | 15 | 34.26 | ||||
| 27 | 34.54 | 16 | 34.54 | ||||
| 28 | 35.52 | 17 | 35.52 | 13 | 35.52 | 8 | 35.52 |
| 29 | 36.54 | 18 | 36.54 | 14 | 36.54 | ||
| 30 | 37.72 | 19 | 37.72 | 9 | 36.54 | ||
| 31 | 39.81 | 20 | 39.81 | 15 | 39.81 | 10 | 39.81 |
| 32 | 43.11 | ||||||
| 33 | 46.96 | 46.96 | 16 | 46.96 | 11 | 46.96 | |
| 34 | 47.21 | ||||||
| 35 | 52.38 | ||||||
| 36 | 52.56 | 52.56 | 17 | 52.56 | 12 | 52.56 | |
| 37 | 52.78 | ||||||
| 38 | 54.09 | 18 | 54.09 | ||||
| 39 | 61.29 | ||||||
| 40 | 65.36 | 65.36 | 19 | 65.36 | 13 | 65.36 | |
| 41 | 65.64 | 20 | 65.64 | ||||
| 42 | 67.96 | ||||||
| 43 | 68.32 | ||||||
| 44 | 70.33 | 70.33 | 70.33 | 14 | 70.33 | ||
| 45 | 70.42 | ||||||
| 46 | 71.00 | ||||||
| 47 | 71.74 | 71.74 | 71.74 | 15 | 71.74 | ||
| 48 | 72.23 | ||||||
| 49 | 72.88 | ||||||
| 50 | 73.72 | 73.72 | 73.72 | 16 | 73.72 | ||
Table 2.
Symmetric modes of vibration. For each mode, the eigenfrequency was written (with red are represented the maximum values, with blue the minimum).
Table 2.
Symmetric modes of vibration. For each mode, the eigenfrequency was written (with red are represented the maximum values, with blue the minimum).
| Type of Symmetry | |||
|---|---|---|---|
| Full System | Half System X | Half System Z | Quarter |
 Mode 1: 4.90 Hz | 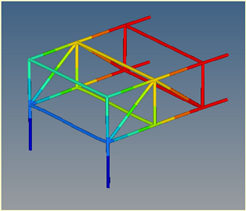 Mode 1: 4.90 Hz | ||
 Mode 3: 10.74 Hz |  Mode 1: 10.74 Hz | ||
 Mode 4: ν = 13.78 Hz | 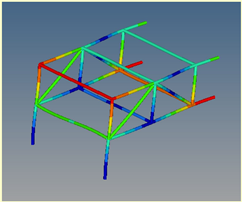 Mode 2: ν = 13.78 Hz | ||
 Mode 6: ν = 16.87 Hz |  Mode 3: ν = 16.87 Hz | ||
 Mode 7: ν = 18.81 Hz | 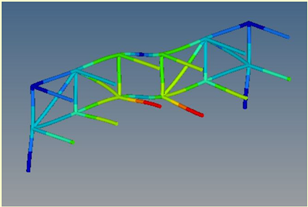 Mode 2: ν = 18.81 Hz | ||
 Mode 10: ν = 23.50 Hz | 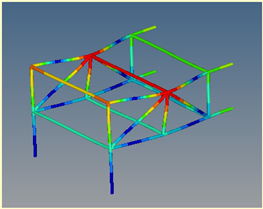 Mode 4: ν = 23.50 Hz | ||
 Mode 12: ν = 27.48 Hz | 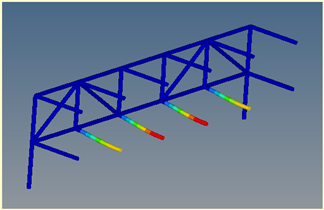 Mode 3: ν = 27.48 Hz | 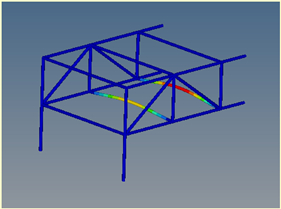 Mode 5: ν = 27.48 Hz |  Mode 1: ν = 27.48 Hz |
 Mode 14: ν = 29.22 Hz | 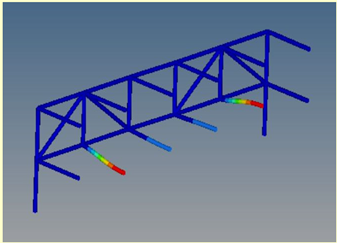 Mode 4: ν = 29.22 Hz | ||
 Mode 15: ν = 29.89 Hz | 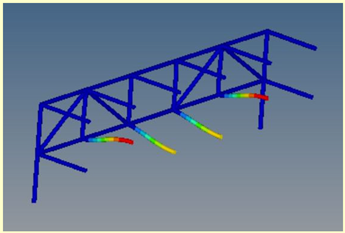 Mode 5: ν = 29.89 Hz | 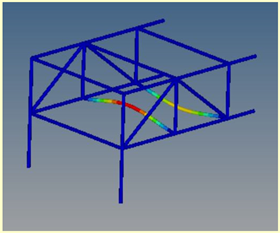 Mode 6: ν = 29.89 Hz | 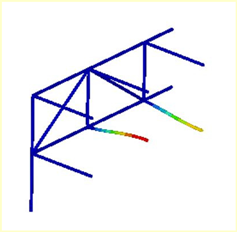 Mode 2: ν = 29.89 Hz |
 Mode 16: ν = 31.00 Hz | 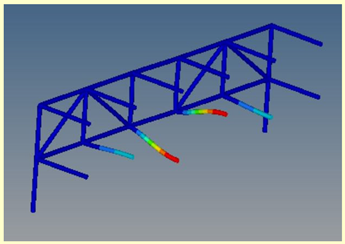 Mode 6: ν = 31.00 Hz |  Mode 7: ν = 31.00 Hz |  Mode 3: ν = 31.00 Hz |
 Mode 17: ν = 31.00 Hz | 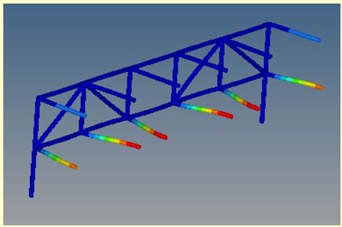 Mode 7: ν = 31.00 Hz | ||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Vlase, S.; Itu, C. The Properties of Structures with Two Planes of Symmetry. Symmetry 2024, 16, 1075. https://doi.org/10.3390/sym16081075
AMA Style
Vlase S, Itu C. The Properties of Structures with Two Planes of Symmetry. Symmetry. 2024; 16(8):1075. https://doi.org/10.3390/sym16081075
Chicago/Turabian StyleVlase, Sorin, and Calin Itu. 2024. "The Properties of Structures with Two Planes of Symmetry" Symmetry 16, no. 8: 1075. https://doi.org/10.3390/sym16081075
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.