
Generating Chaos in Dynamical Systems: Applications, Symmetry Results, and Stimulating Examples
 , , , and
, , , and {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. A Modified Classic Model for Training on the Subject of Chaos Generation
2.1. The Case Where (Known Result)
2.2. The Case Where (Unpublished Result)
Challenges for Learners
2.3. Dynamics Controlled by a Probability Distribution
3. The Hypothetical Models—Challenges for Learners
Dynamical Systems Driven by Probability Distributions
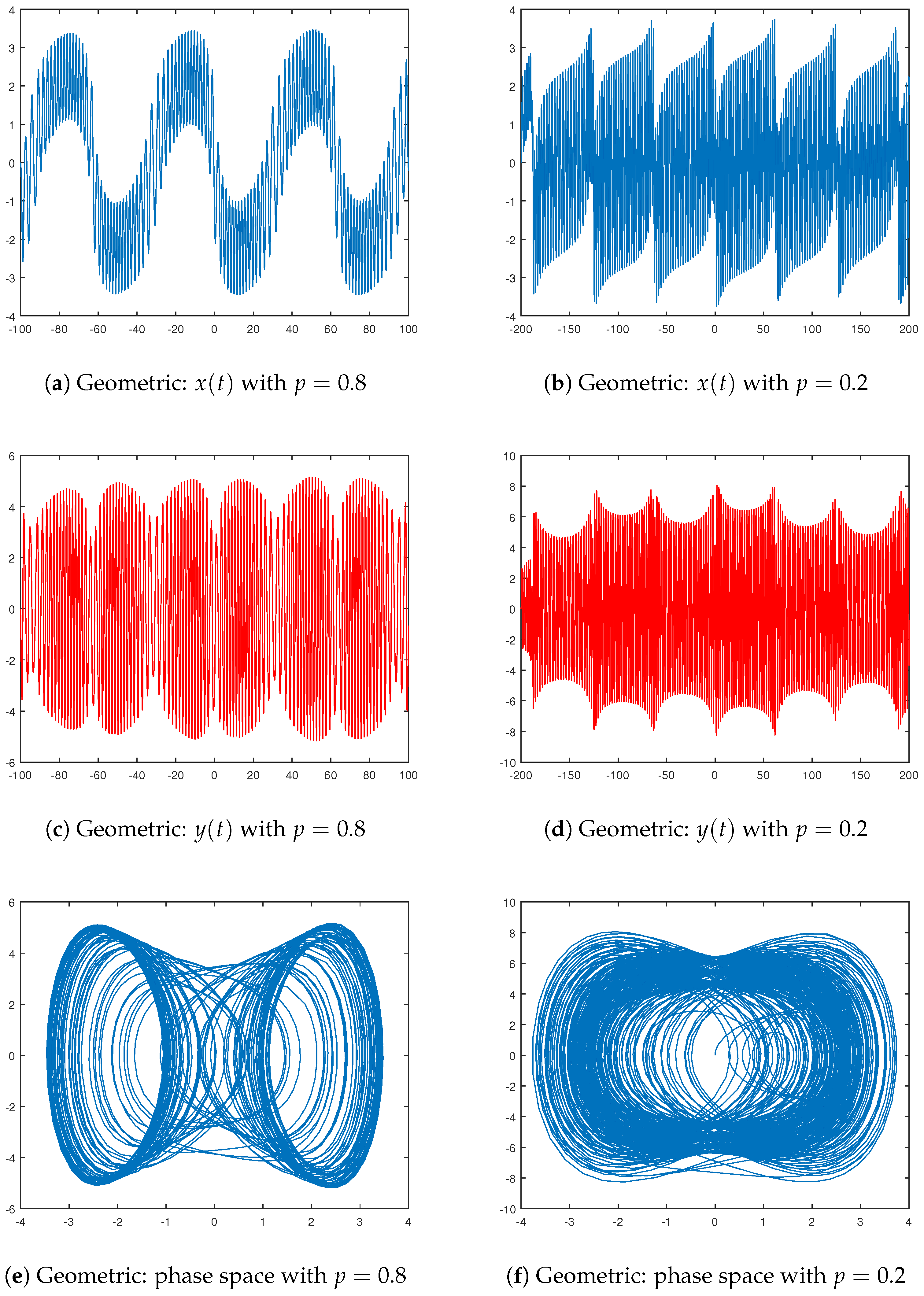
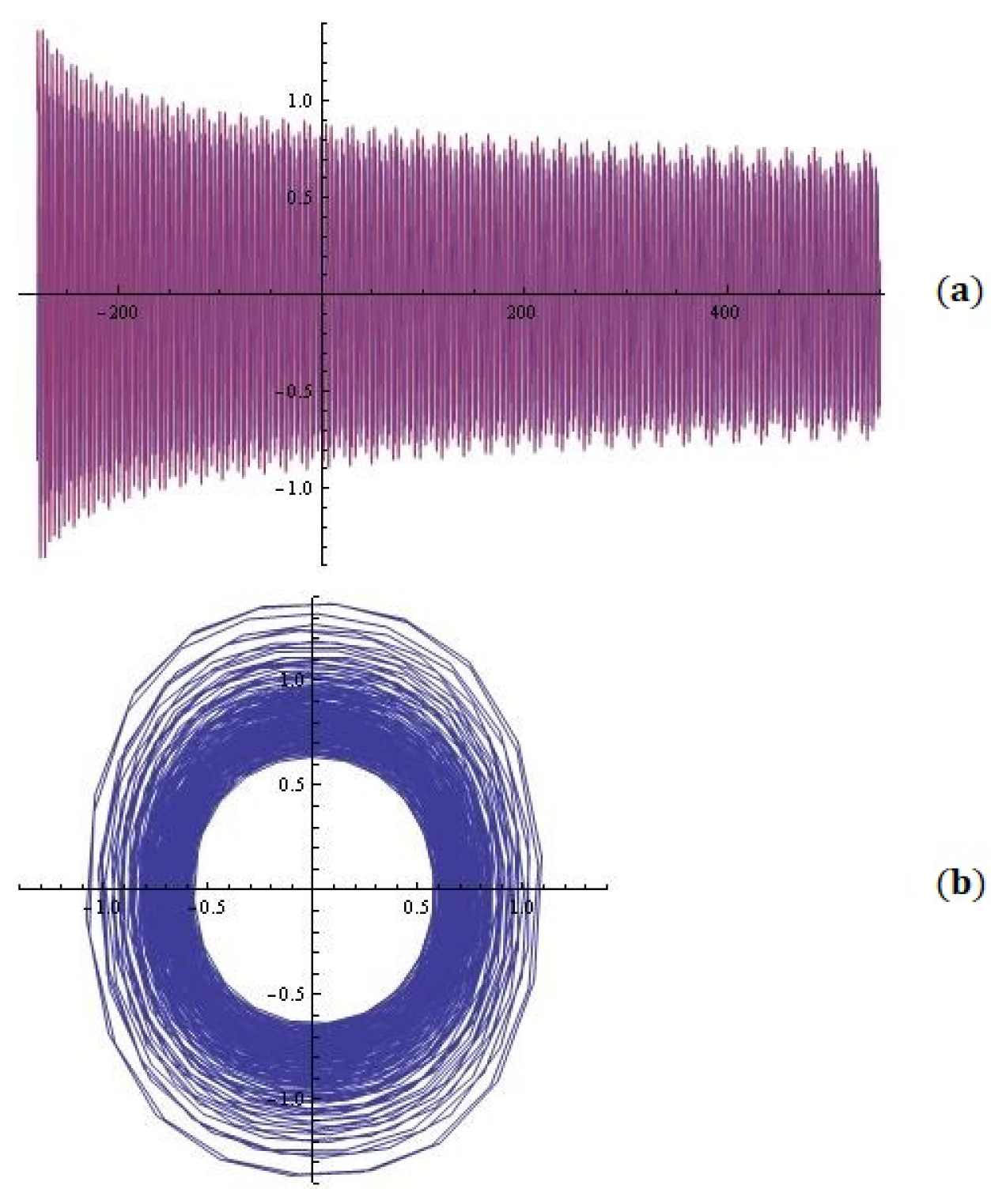
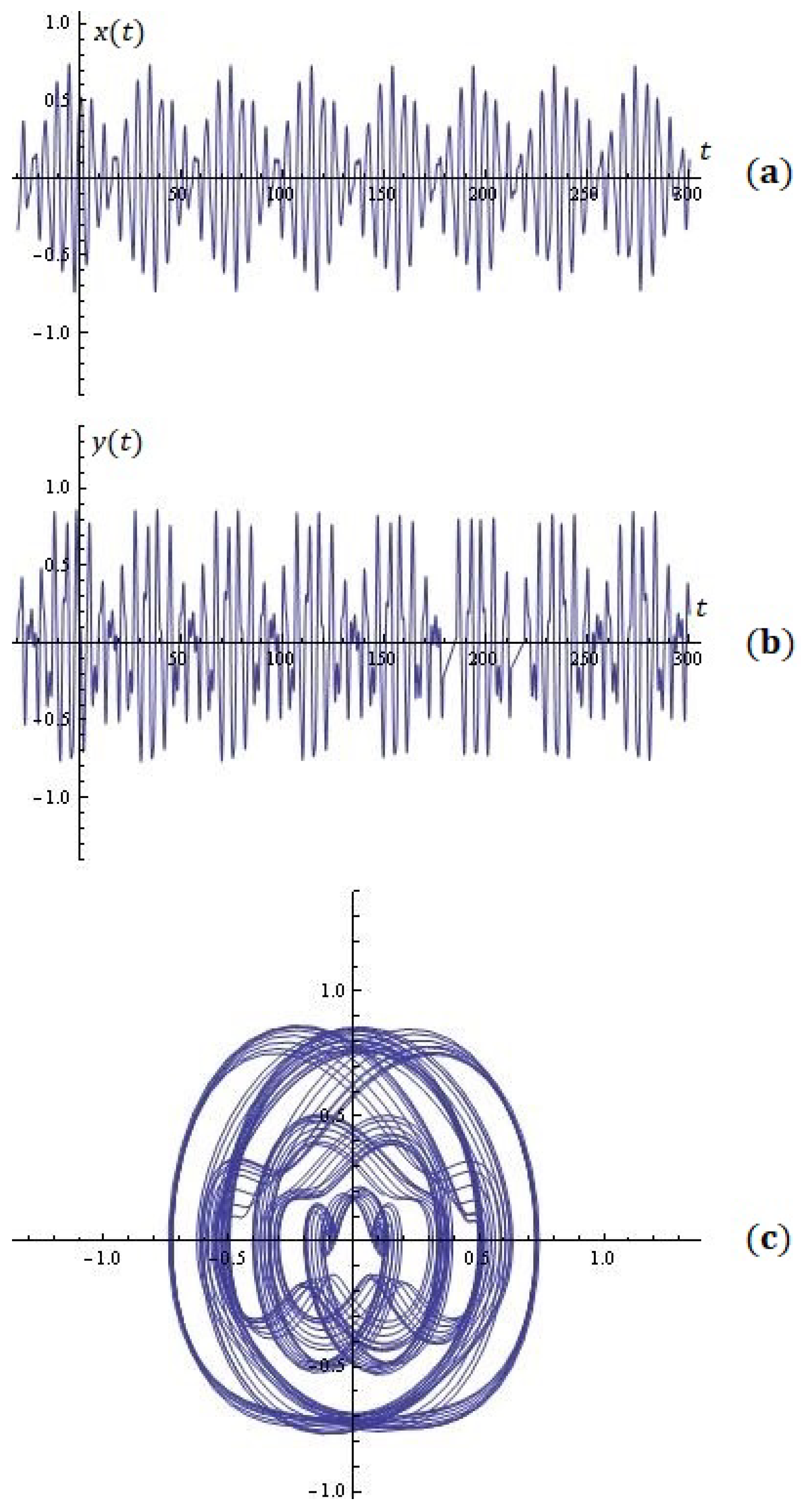
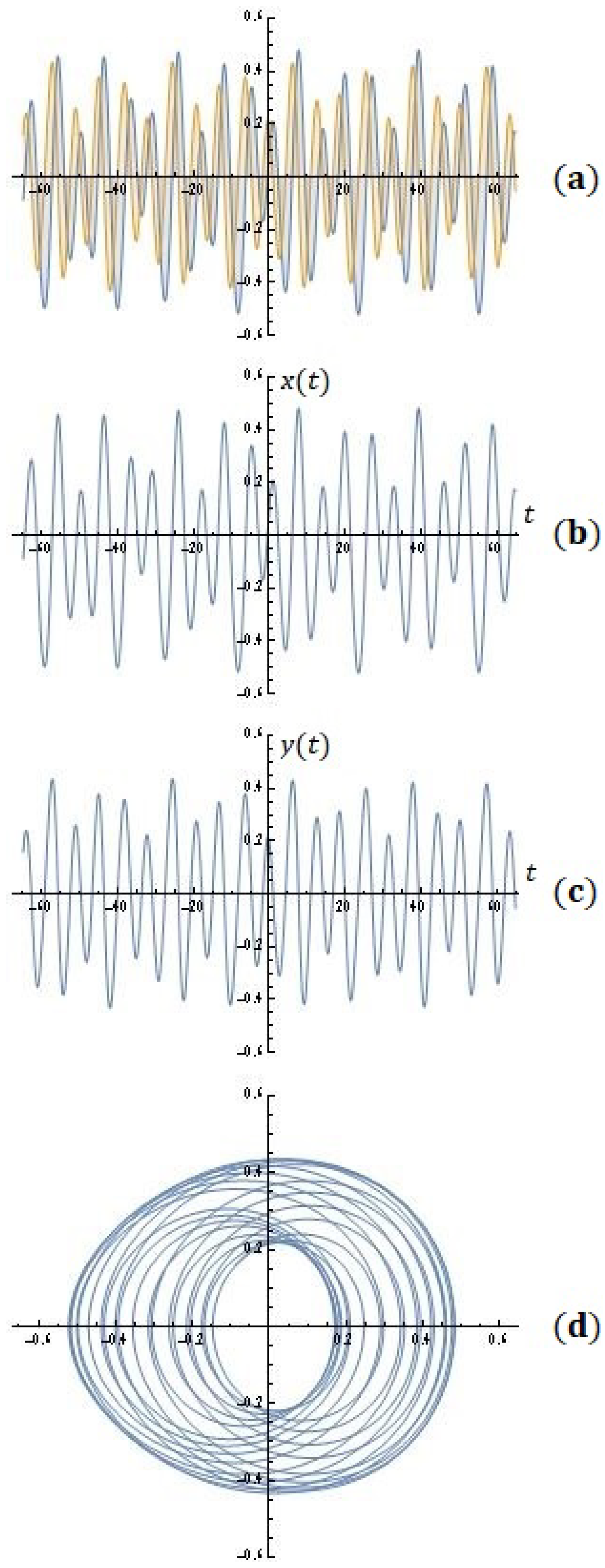
4. Some Simulations
5. Recommended Training Tasks on the Topic of Chaos Generation
- (i)
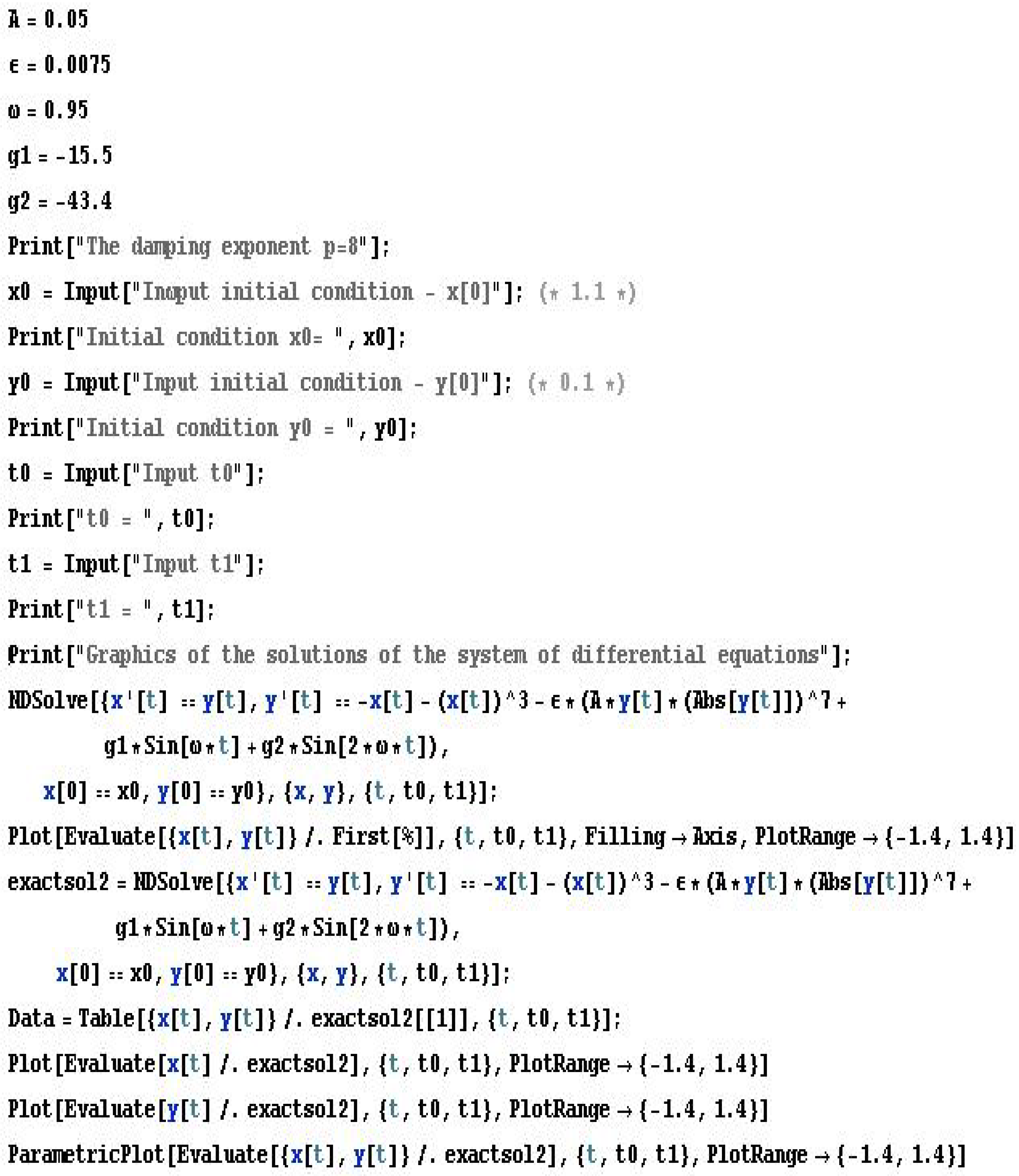
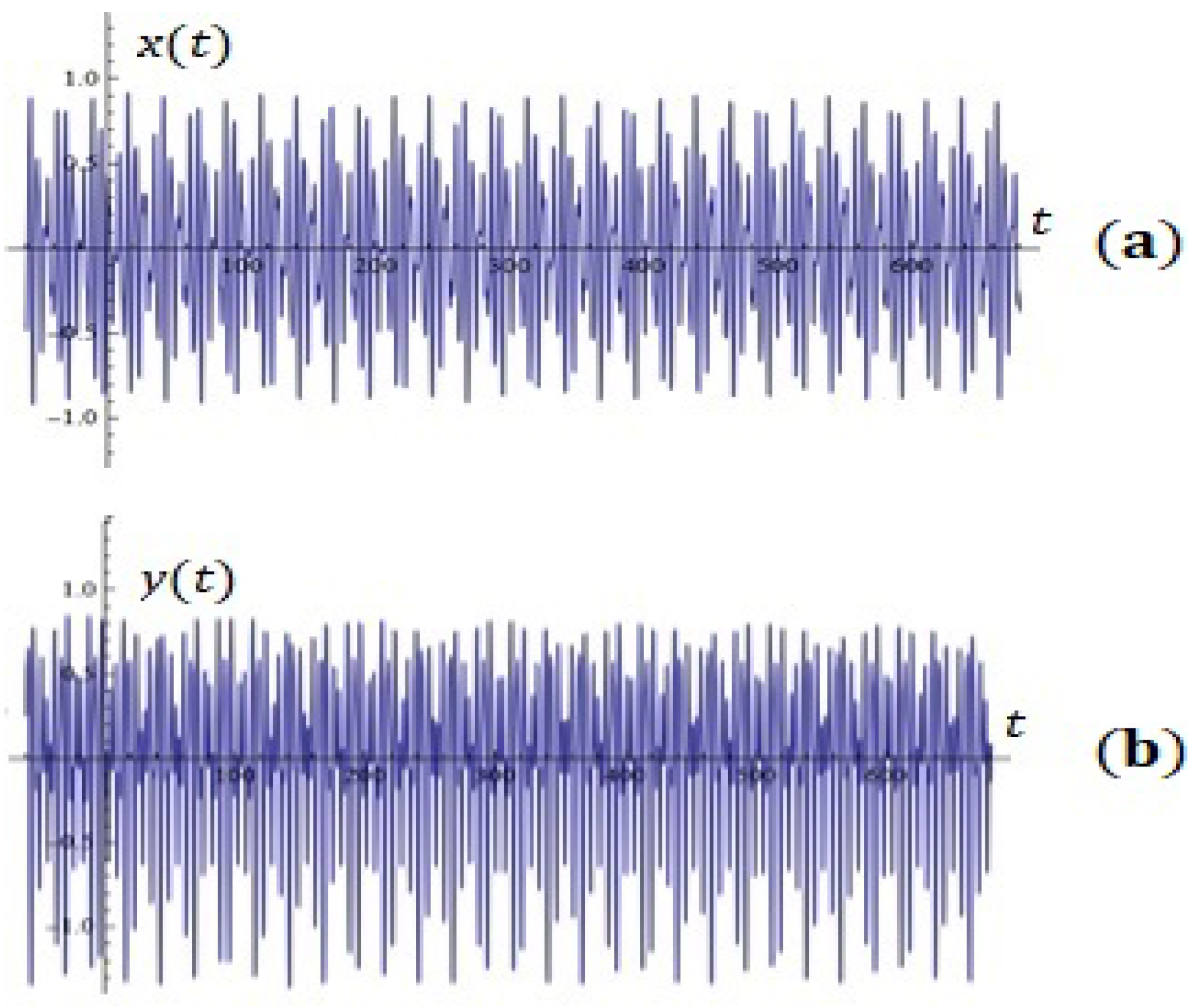
- Generate chaos by using the learning module provided to you, implemented in Computer Algebraic System Mathematica for scientific computing (see Figure 15);
- (ii)
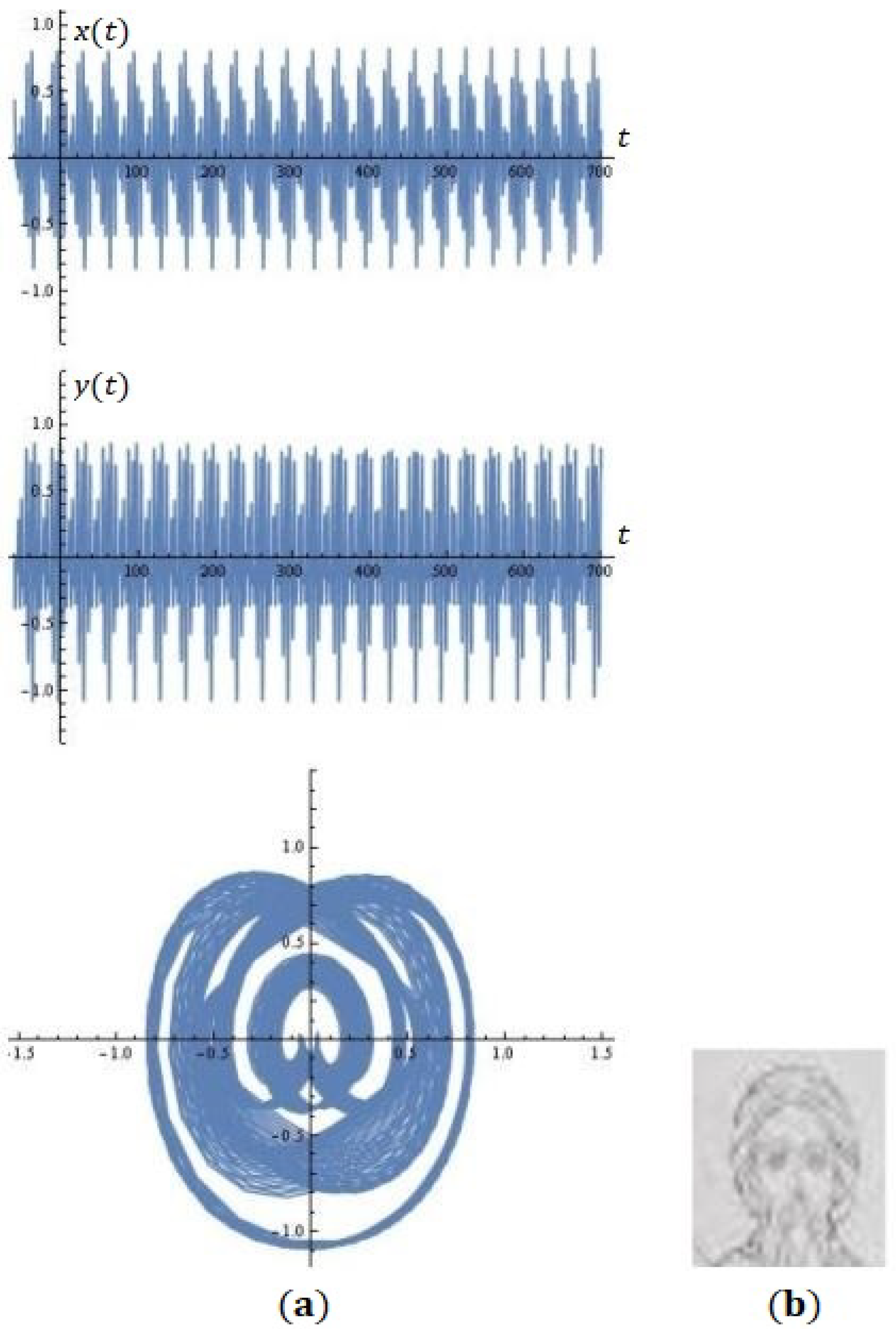
- Indicate the values of the parameters at which the phase portrait approaches the illustration in Figure 16b (portrait of a Bulgarian saint);
- (iii)
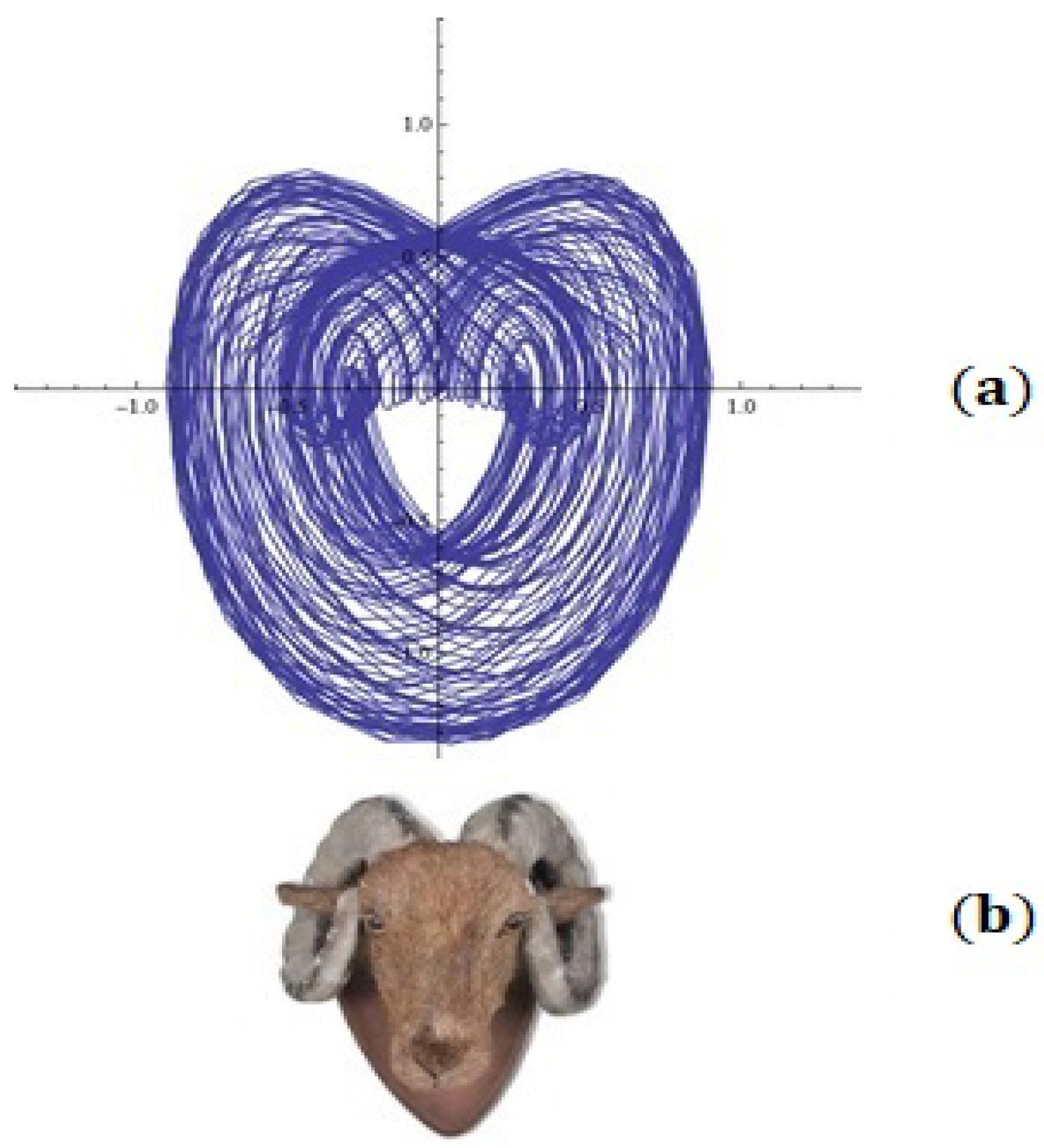
- Indicate the values of the parameters at which the phase portrait approaches the illustration in Figure 17b (sheep’s head illustration);
- (iv)
- Draw appropriate conclusions.
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Georgieva, M.; Grozdev, S. Morphodynamics for the Development of Noospheric Intelligence; East-West Publishing House: Sofia, Bulgaria, 2016. (In Bulgarian) [Google Scholar]
- Guckenheimer, J.; Holmes, P. Nonlinear Oscillations, Dynamical Systems, and Bifurcations of Vector Fields; Springer: New York, NY, USA, 1983. [Google Scholar]
- Perko, L. Differential Equations and Dynamical Systems; Springer: New York, NY, USA, 1991. [Google Scholar]
- Blows, T.; Perko, L. Bifurcation of limit cycles from centers and separatix cycles of planar analytic systems. Siam Rev. 1994, 36, 341–371. [Google Scholar] [CrossRef]
- Byrd, P.; Friedman, M. Handbook of Elliptic Integrals for Scientist and Engineers; Springer: New York, NY, USA, 1971. [Google Scholar]
- Kyurkchiev, N.; Zaevski, T.; Iliev, A.; Kyurkchiev, V.; Rahnev, A. Modeling of Some Classes of Extended Oscillators: Simulations, Algorithms, Generating Chaos, and Open Problems. Algorithms 2024, 17, 121. [Google Scholar] [CrossRef]
- Sanjuan, M. The effect of nonlinear damping on the universal oscillator. Int. J. Bifurc. Chaos 1999, 9, 735–744. [Google Scholar] [CrossRef]
- Soliman, M.S.; Thompson, J.M.T. The effect of nonlinear damping on the steady state and basin bifurcation patterns of a nonlinear mechanical oscillator. Int. J. Bifurc. Chaos 1992, 2, 81–91. [Google Scholar] [CrossRef]
- Fangnon, R.; Ainamon, C.; Monwanou, A.V.; Mowadinou, C.H.; Orpu, J.B. Nonlinear dynamics of the quadratic damping Helmholtz oscillator. Complexity 2020, 2020, 8822534. [Google Scholar] [CrossRef]
- Bikdash, M.; Balachandran, B.; Nayfeh, A. Melnikov analysis for a ship with a general roll-damping model. Nonl. Dyn. 1994, 6, 101–124. [Google Scholar] [CrossRef]
- Ravindra, B.; Mallik, A.K. Stability analysis of a non–linearly clamped Duffing oscillator. J. Spund Vib. 1999, 171, 708–716. [Google Scholar] [CrossRef]
- Ravindra, B.; Mallik, A.K. Role of nonlinear dissipation in soft Duffing oscillators. Phys. Rev. E 1984, 49, 4950–4954. [Google Scholar] [CrossRef]
- Sanjuan, M. Monoclinic bifurcation sets of driven nonlinear oscillators. Int. J. Theroetical Phys. 1996, 35, 1745–1752. [Google Scholar] [CrossRef]
- Holmes, P.; Marsden, J. Horseshoes in perturbation of Hamiltonian systems with two degrees of freedom. Comm. Math. Phys. 1982, 82, 523–544. [Google Scholar] [CrossRef]
- Holmes, P.; Marsden, J. A partial differential equation with infinitely many periodic orbits: Chaotic oscillations. Arch. Ration. Mech. Anal. 1981, 76, 135–165. [Google Scholar] [CrossRef]
- Francescatto, A.; Contento, G. Bifurcations in ship rolling: Experimental results and parameter identification technique. Ocean Eng. 1999, 26, 1095–1123. [Google Scholar] [CrossRef]
- Tang, K.; Man, K.; Zhong, G.; Chen, G. Generating chaos via x|x|. IEEE Trans. Circuit Syst. I Fundam. Theory Appl. 2001, 48, 636–640. [Google Scholar] [CrossRef]
- Levi, M.; Hoppensteadt, F.; Miranker, W. Dynamics of the Josephson junction. Quart. Appl. Math. 1978, 35, 167–198. [Google Scholar] [CrossRef]
- Siewe, M.; Kakmeni, F.; Tchawoua, C. Resonant oscillation and homoclinic bifurcation in ϕ6—Van der Pol oscillator. Chaos Solut. Fractals 2004, 21, 841–853. [Google Scholar] [CrossRef]
- Yu, J.; Li, J. Investigation on dynamics of the extended Duffing-Van der Pol system. Zetschrift Naturforschung 2009, 64, 341–346. [Google Scholar] [CrossRef]
- Siewe, M.; Tchawoua, C.; Rajasekar, S. Homoclinic bifurcation and chaos in ϕ6 Rayleigh oscillator with three wells driven by an amplitude modulated force. Int. J. Bifurc. Chaos 2011, 21, 1583–1593. [Google Scholar] [CrossRef]
- Lenci, S.; Rega, G. Controlling nonlinear dynamics in a two-well impact system. I. Attractors and bifurcation scenario under symmetric excitations. Int. J. Bifur. Chaos 1998, 8, 2387–2407. [Google Scholar] [CrossRef]
- Lenci, S.; Rega, G. Controlling nonlinear dynamics in a two-well impact system. II. Attractors and bifurcation scenario under unsymmetric optimal excitation. Int. J. Bifur. Chaos 1998, 8, 2409–2424. [Google Scholar] [CrossRef]
- Soto-Trevino, C.; Kaper, T.J. Higher-order Melnikov theory for adiabatic systems. J. Math. Phys. 1996, 37, 6220–6249. [Google Scholar] [CrossRef]
- Yagasaki, K. Melnikov’s method and codimension–two bifurcation in forced oscillations. J. Differ. Equ. 2002, 185, 1–24. [Google Scholar] [CrossRef]
- Yagasaki, K. Melnikov theory for subharmonics and their bifurcations in forced oscillations. SIAM J. Appl. Math. 1996, 56, 1720–1765. [Google Scholar] [CrossRef]
- Gavrilov, L.; Iliev, I. The limit cycles in a generalized Rayleigh-Lienard oscillator. Discret. Contin. Dyn. Syst. 2023, 43, 2381–2400. [Google Scholar] [CrossRef]
- Li, Y.; Li, C.; Zhong, Q.; Tengfei, L.; Sicong, L. Attractor Merging and Amplitude Control of Hyperchaos in a Self-Reproducing Memristive Map. Int. J. Bifurc. Chaos 2024, 34, 2450050. [Google Scholar] [CrossRef]
- Li, Y.; Li, C.; Zhong, Q.; Sicong, L.; Tengfei, L. A memristive chaotic map with only one bifurcation parameter. Nonlinear Dyn. 2024, 112, 3869–3886. [Google Scholar] [CrossRef]


Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kyurkchiev, N.; Zaevski, T.; Iliev, A.; Kyurkchiev, V.; Rahnev, A. Generating Chaos in Dynamical Systems: Applications, Symmetry Results, and Stimulating Examples. Symmetry 2024, 16, 938. https://doi.org/10.3390/sym16080938
Kyurkchiev N, Zaevski T, Iliev A, Kyurkchiev V, Rahnev A. Generating Chaos in Dynamical Systems: Applications, Symmetry Results, and Stimulating Examples. Symmetry. 2024; 16(8):938. https://doi.org/10.3390/sym16080938
Chicago/Turabian StyleKyurkchiev, Nikolay, Tsvetelin Zaevski, Anton Iliev, Vesselin Kyurkchiev, and Asen Rahnev. 2024. "Generating Chaos in Dynamical Systems: Applications, Symmetry Results, and Stimulating Examples" Symmetry 16, no. 8: 938. https://doi.org/10.3390/sym16080938