
Dual-Loop μ-Synthesis Direct Thrust Control for Turbofan Engines

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
- To address the issue of poor linearity between power lever angle and thrust in indirect thrust control schemes, this paper proposes a multivariable direct thrust control structure that ensures thrust tracking while using nozzle adjustments to regulate the pressure ratio, preventing key performance parameters from exceeding their limits.
- To solve the problem of unmeasurable thrust and to avoid the difficulty in obtaining thrust data for data-driven algorithms, a fast thrust estimation algorithm based on measurable parameters and engine thermodynamic characteristics is introduced to act as a virtual thrust sensor.
- To tackle external disturbances and uncertainties in direct thrust control, a dual-loop μ-synthesis multivariable direct thrust control method is designed.
2. Design Methods
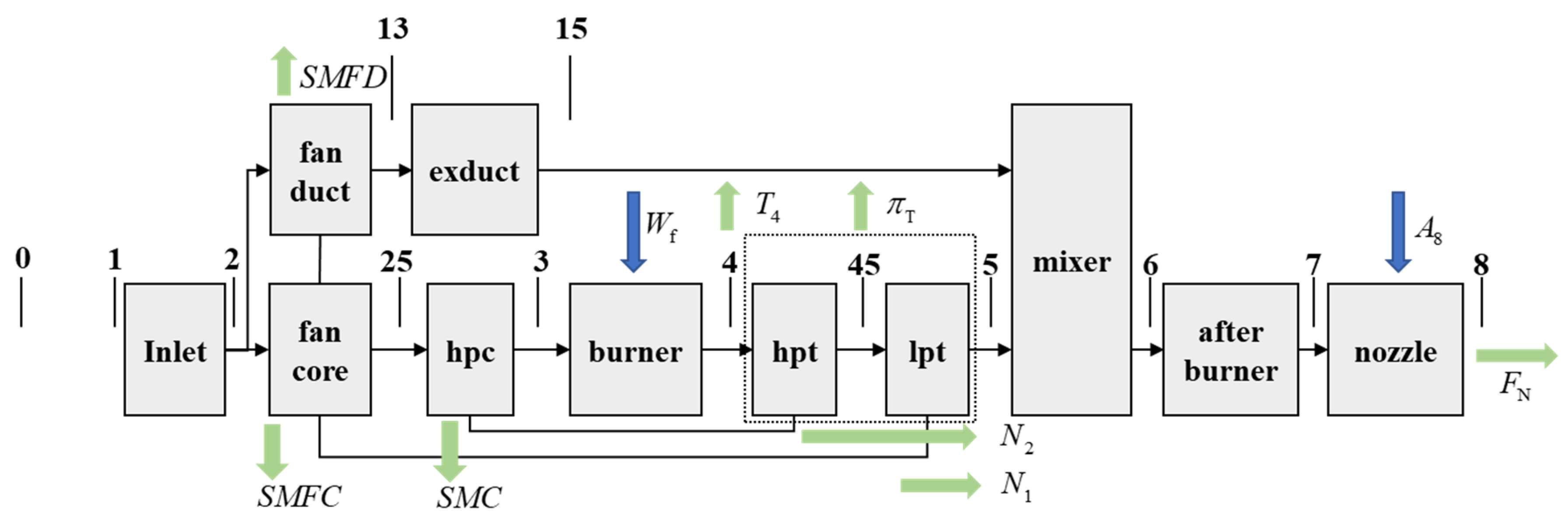
2.1. Augmented Engine Model
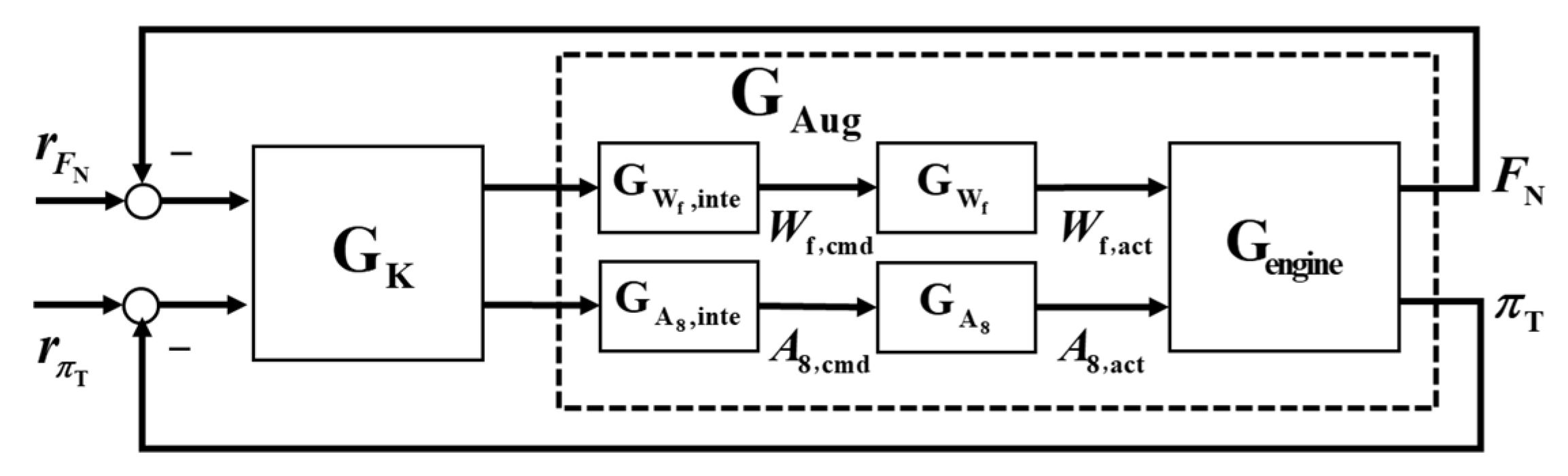
2.2. Direct Thrust Dual-Loop Control Scheme
2.3. Thrust Estimation Algorithm
- 4.
- The fan core thermal parameter calculation is similar to Step 1. From , , fan core outlet total pressure (unit: kPa), , and fan core component characteristics, we can obtain the inlet flow rate (unit: kg/s), outlet flow rate (unit: kg/s), and outlet total temperature (unit: K).
- 5.
- The fan inlet air flow rate is obtained from Equations (14) and (15).
- 6.
- Considering the extracted air flow rate (unit: kg/s) from the compressor, thenThe calculation of other thermal parameters is similar to Step 1. From the high-pressure rotor speed , , the total pressure at the outlet of the compressor (unit: kPa), , and the characteristics of high-pressure compressor components, the inlet air flow rate of the compressor , the outlet air flow rate of the compressor (unit: kg/s), and the total temperature at the outlet of the compressor (unit: K) can be obtained.
- 7.
- From , and the fuel flow rate , we obtain the fuel–air ratio and the gas flow rate at the outlet of the combustion chamber.The combustion efficiency and the low-level calorific value (unit: J/kg) of the fuel are known, from which the total temperature at the outlet of the combustion chamber is calculated.where (unit: J/K) is the constant-pressure specific heat capacity of air and (unit: J/K) is the constant-pressure specific heat capacity of gas; then, the combustion chamber calculation module is
- 8.
- Considering the high-pressure turbine cooling air flow rate is (unit: kg/s), then the high-pressure turbine outlet gas flow rate isThe fuel–air ratio at the high-pressure turbine outlet isThe corrected high-pressure turbine rotor speed is calculated from (units: K):From the high-pressure turbine inlet total pressure (unit: kPa) and outlet total pressure (unit: kPa), the high-pressure turbine pressure ratio is calculated:Based on the characteristics of the high-pressure turbine components, (unit: rpm), and , parameters of the high-pressure turbine can be obtained:where is the gas insulation coefficient. In summary, the module for calculating the thermal parameters of the high-pressure turbine can be obtained:
- 9.
- The calculation of thermal parameters of the low-pressure turbine is the same as in Step 6. From , (unit: kg/s), high-pressure turbine outlet total pressure , low-pressure turbine outlet total pressure (unit: kPa), high-pressure turbine outlet total temperature (unit: K), and low-pressure turbine component characteristics, we can obtain the low-pressure turbine outlet flow rate (unit: kg/s), the low-pressure turbine outlet temperature (unit: K), and the low-pressure turbine outlet fuel–air ratio .
- 10.
- The calculation of thermal parameters at the bypass duct outlet is as follows. Considering the air flow rate of anti-surge air into the bypass duct as (unit: kg/s), the air flow rate at the bypass duct outlet isLet the total pressure recovery factor of the bypass duct be , then the total pressure isAccording to the conservation of energy, the total temperature at the outlet of the bypass duct isIn summary, the module for calculating the thermal parameters of the bypass duct can be obtained:
- 11.
- The calculation of mixing chamber outlet thermal parameters is as follows. According to the conservation of mass in the mixing chamber, the gas flow rate (unit: kg/s) at the outlet of the mixing chamber is given byThen, the fuel–air ratio at the outlet of the mixing chamber isAccording to the conservation of energy and impulse (units: K and kPa),In summary, the module for calculating the thermal parameters of the mixer can be obtained:
- 12.
- The calculation of the thermal parameters of the nozzle module is as follows. By conservation of mass,Let the nozzle total pressure recovery coefficient be , then the outlet total pressure isWe define the nozzle critical pressure ratio and nozzle pressure ratio asWe calculate the nozzle exit static pressure in two cases:(1)(2)The velocity coefficient can be obtained:where , and the nozzle outlet gas velocity isIn summary, the module for calculating the nozzle parameters is as follows:
- 13.
- Finally, the thrust (unit N) of a mixed-exhaust twin-rotor turbofan engine is calculated as follows:where (unit: kg/s) represents the nozzle outlet gas mass flow rate, (unit: kPa) is the outlet total gas pressure of the nozzle, (unit: kPa) means ambient pressure, and (unit: m/s) is the flight velocity.
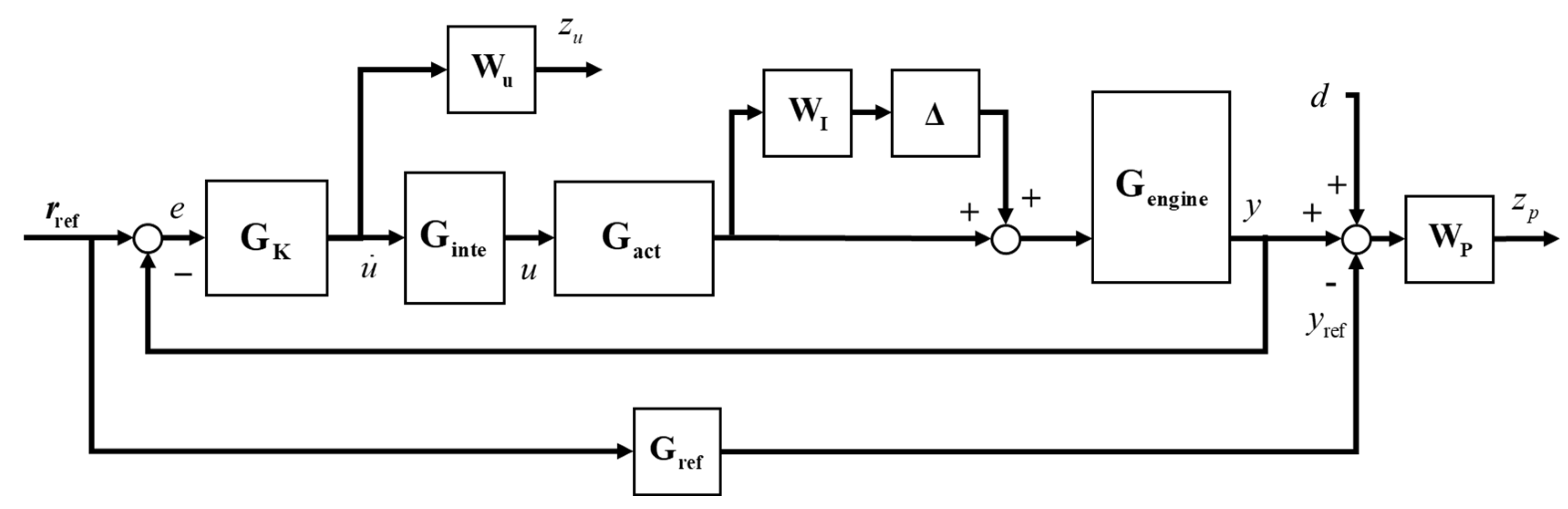
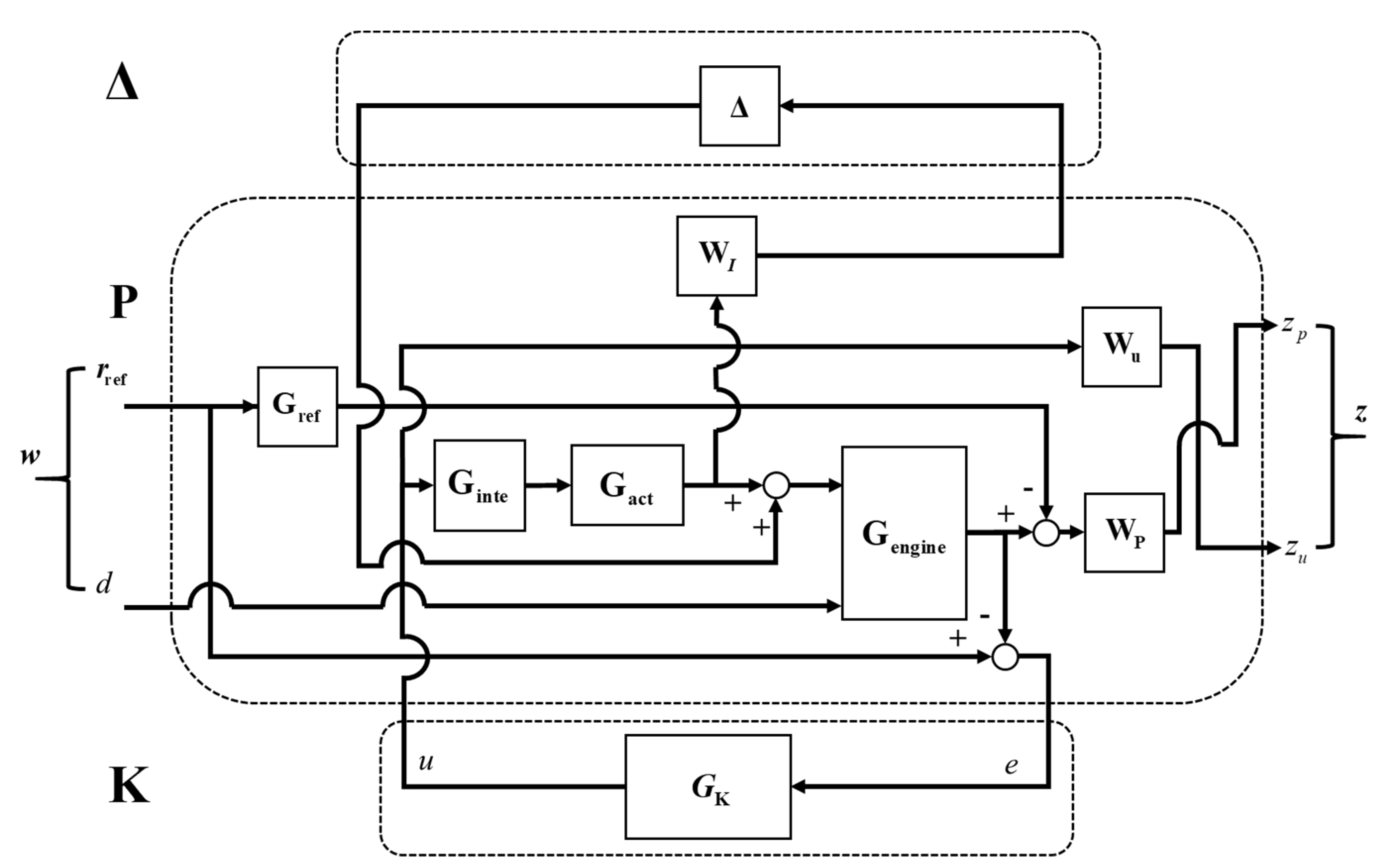
2.4. μ-Synthesis Control Design
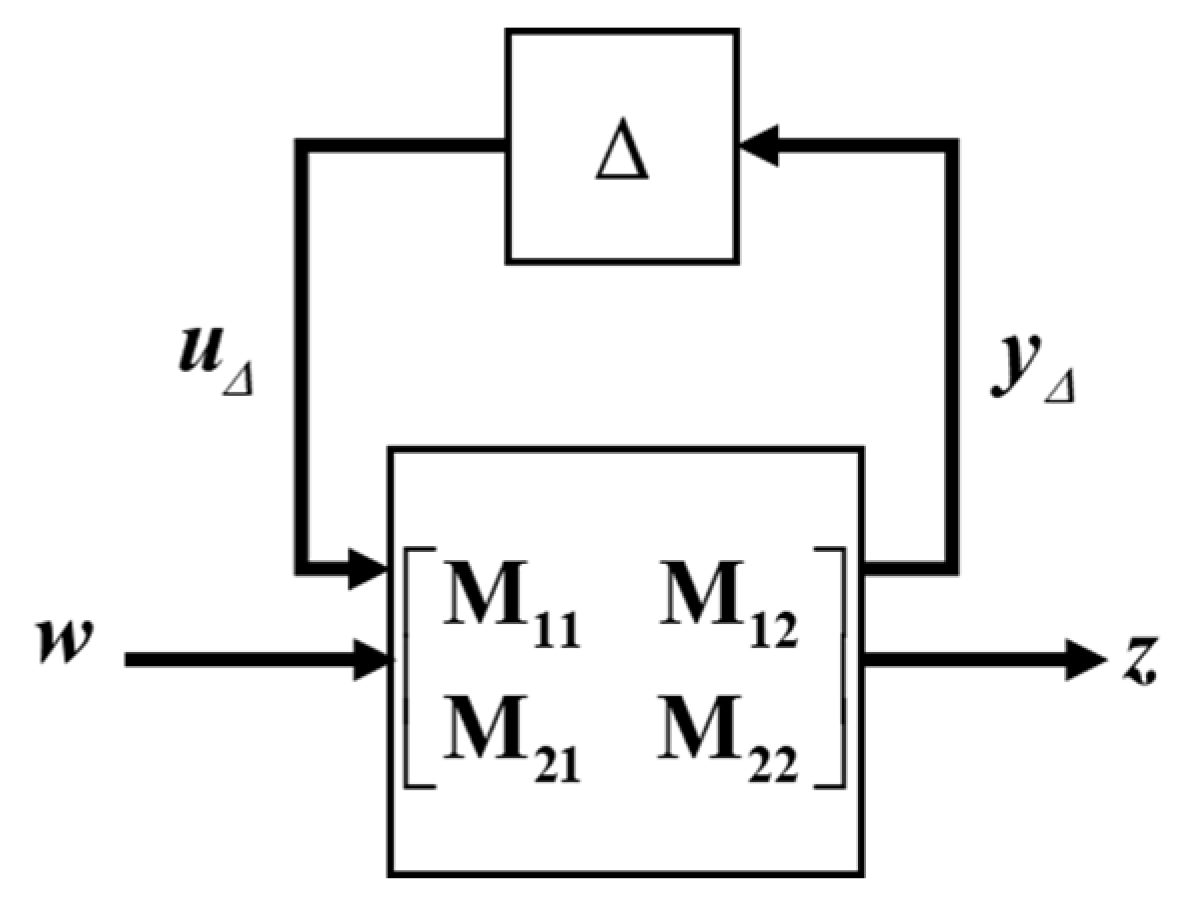
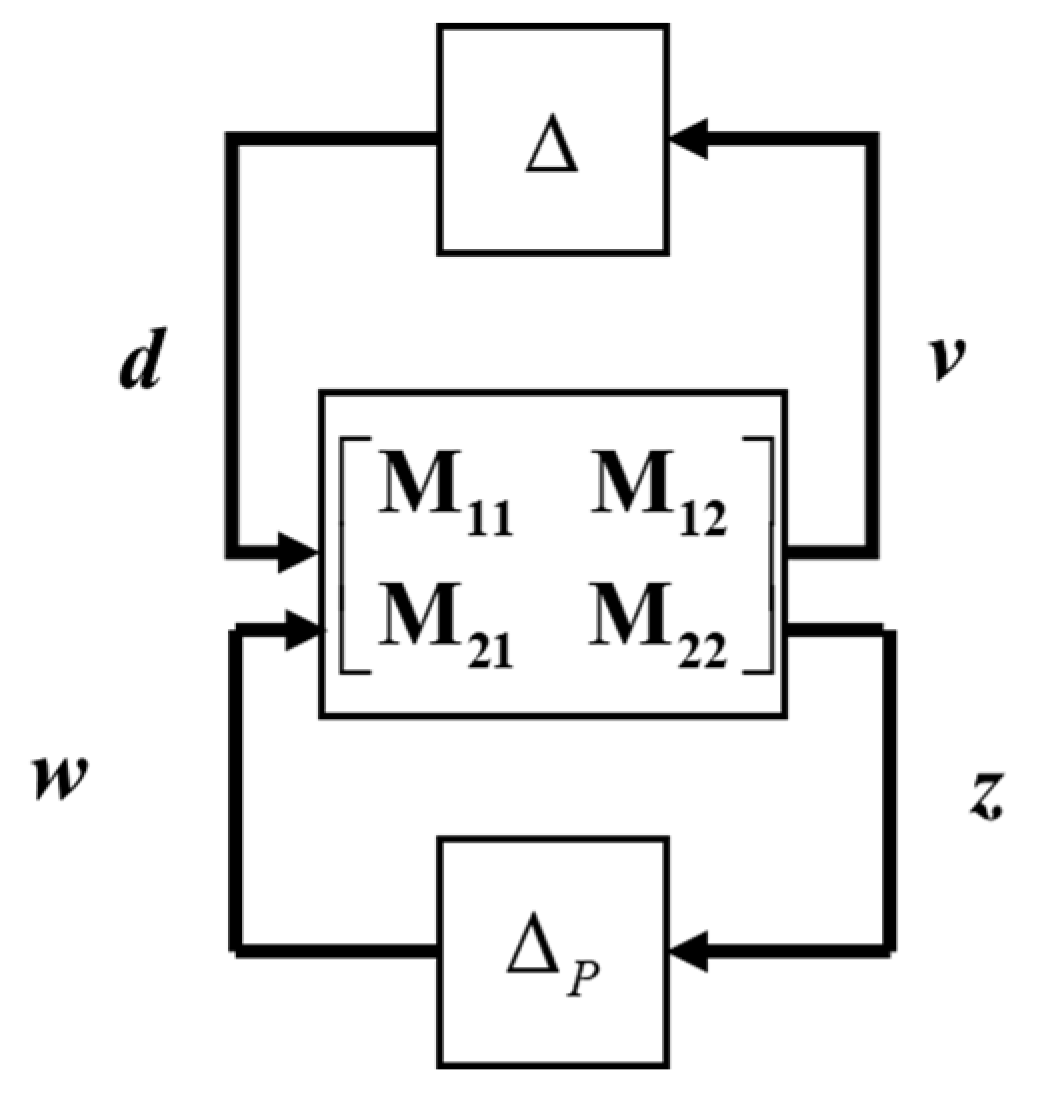
2.4.1. Robust Stability and Robust Performance
2.4.2. Weighted Function Frequency Domain Shaping Design
3. Design Example
3.1. Plant Description and Controller Design
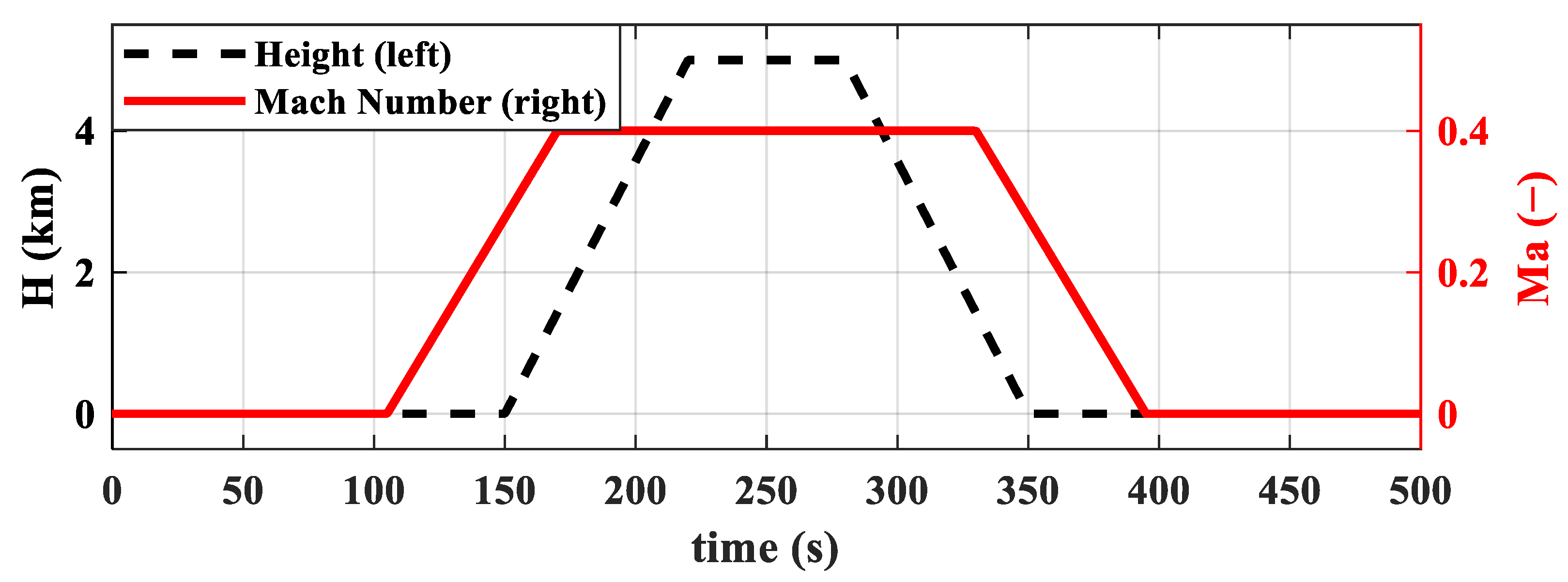
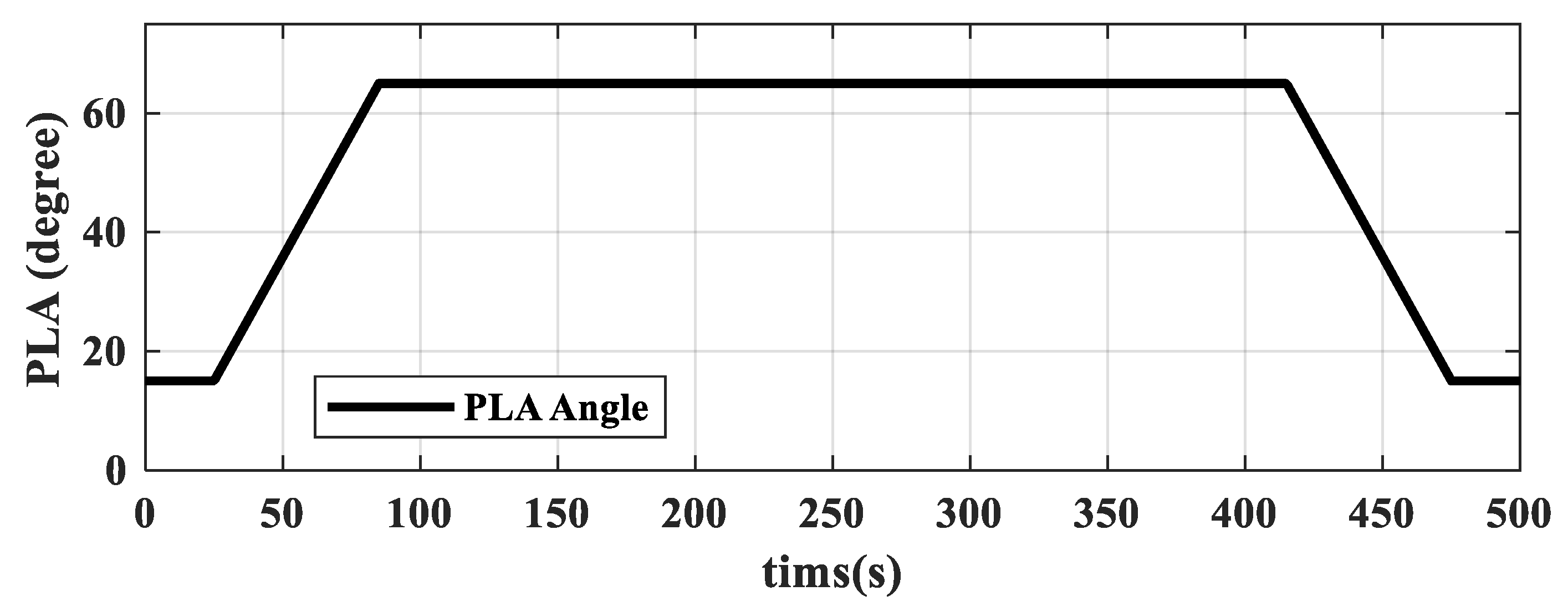
3.2. Simulation Test Procedure
3.3. Closed-Loop Simulation Results
4. Discussion
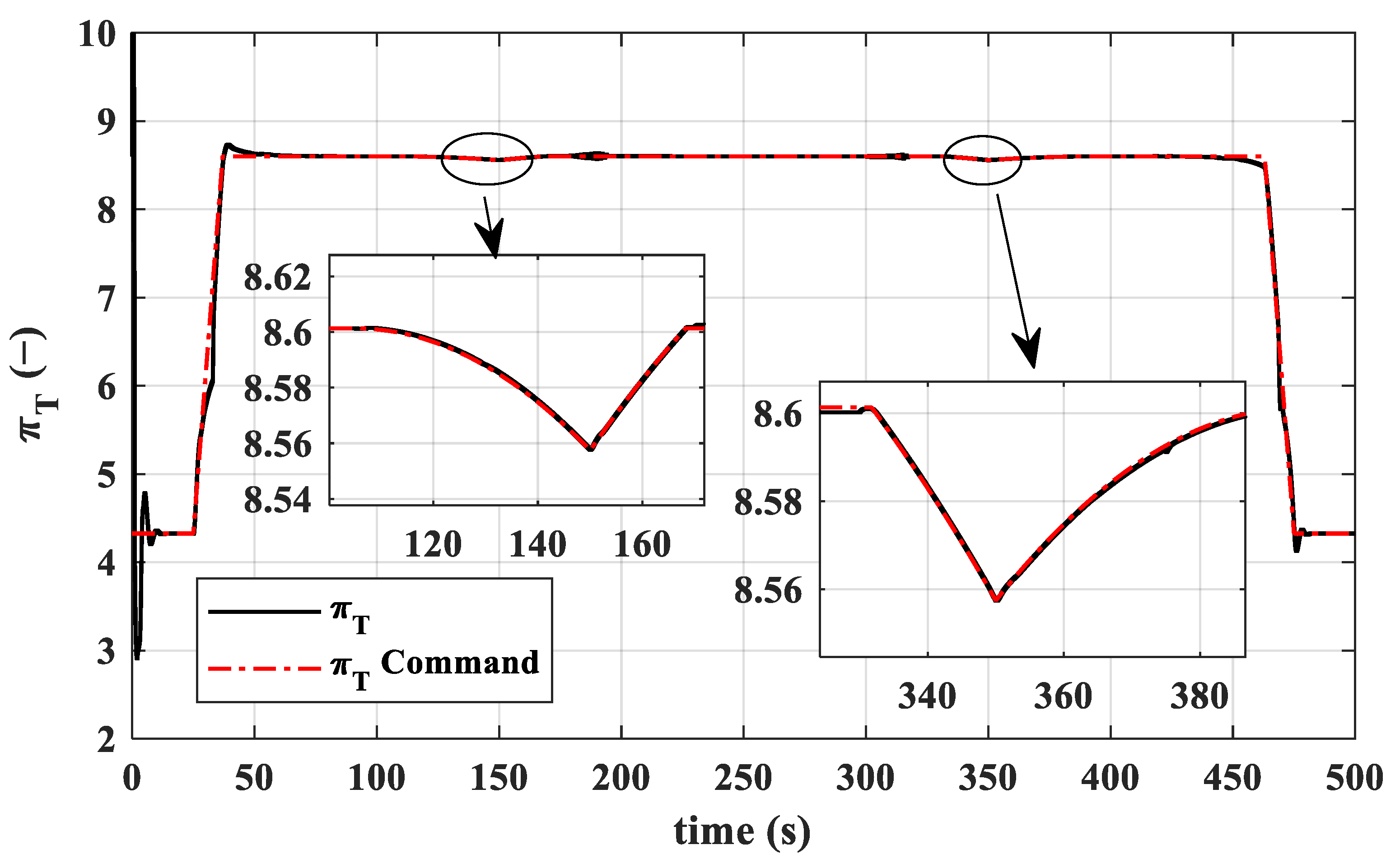
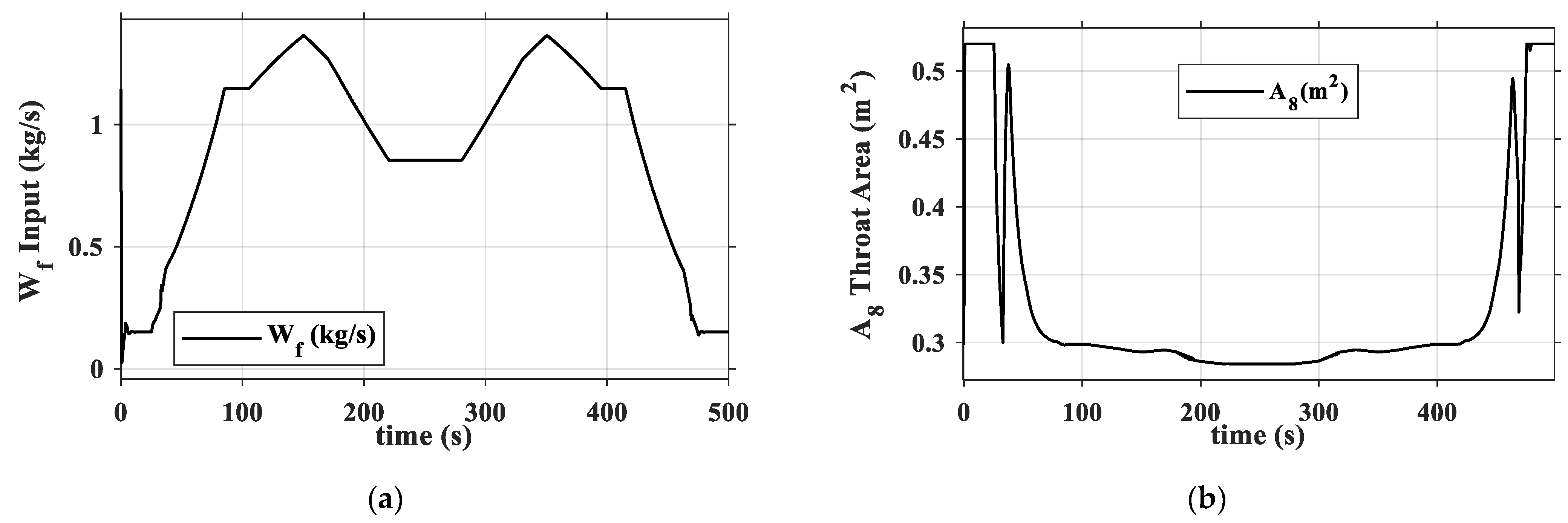
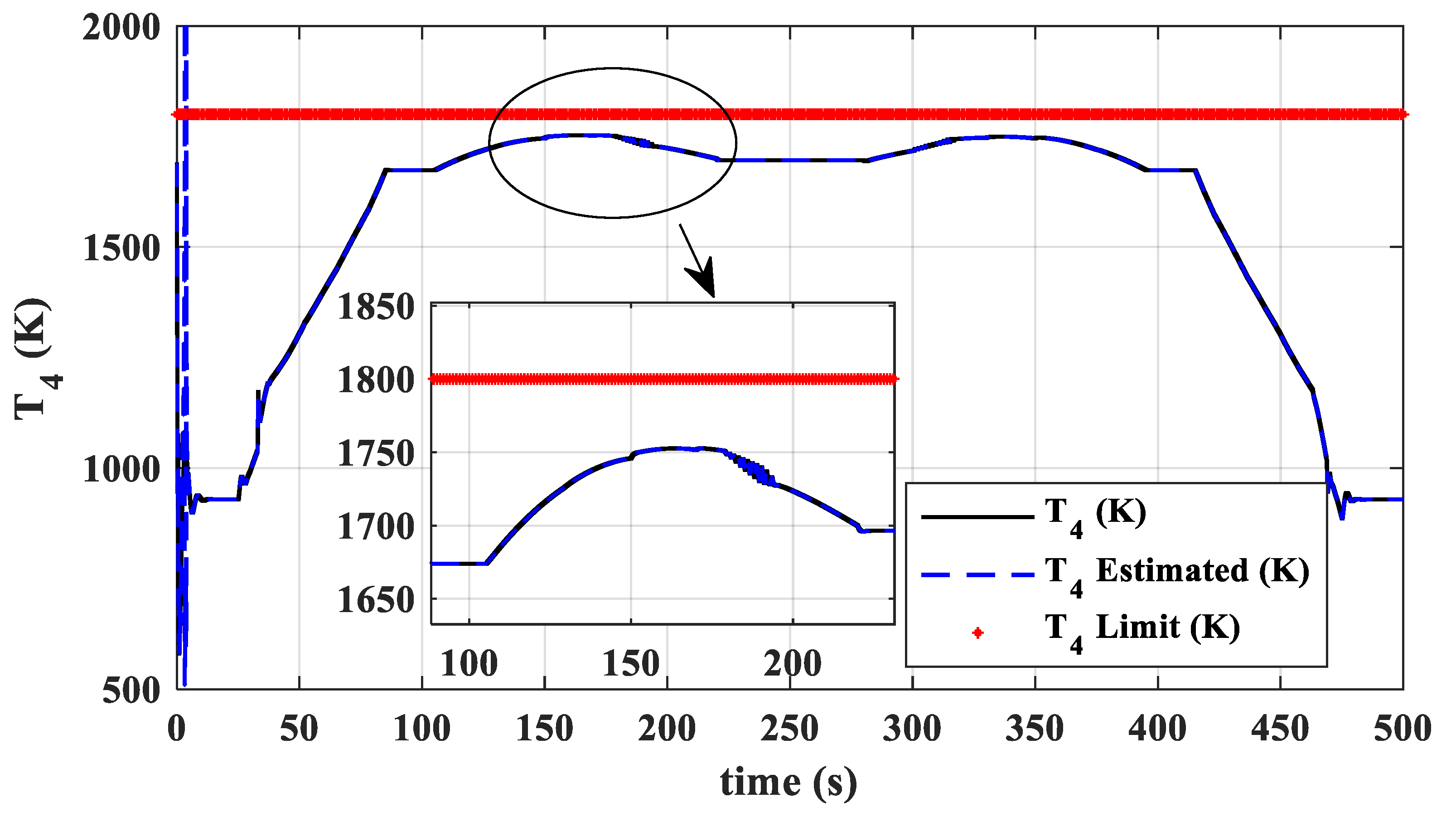
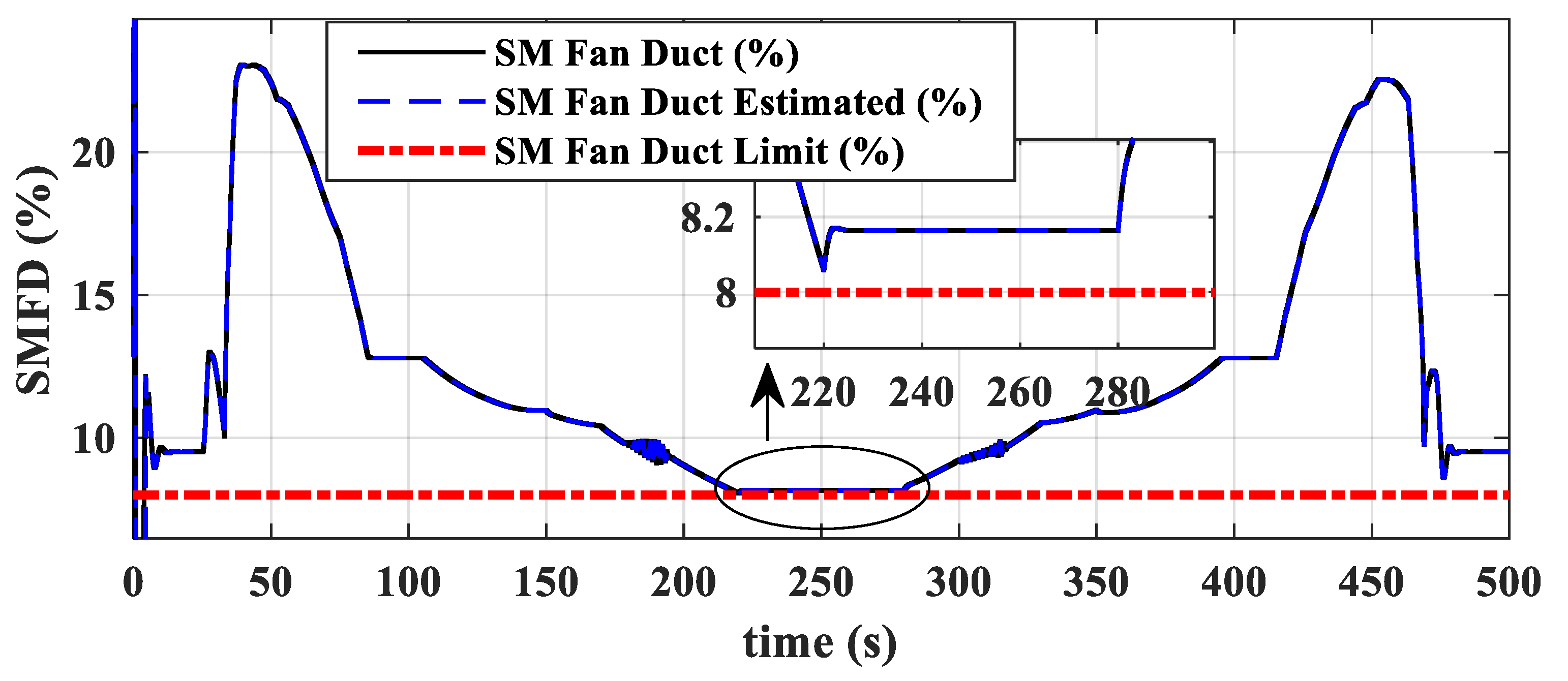
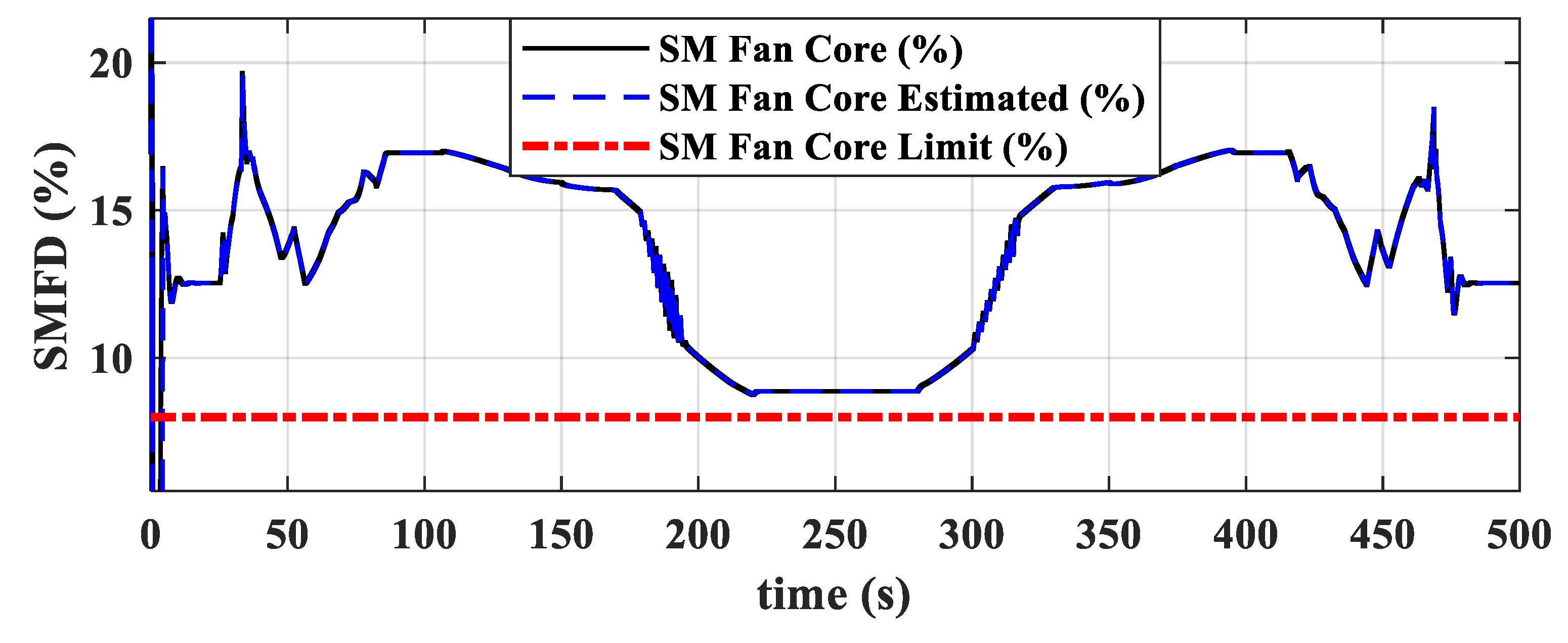
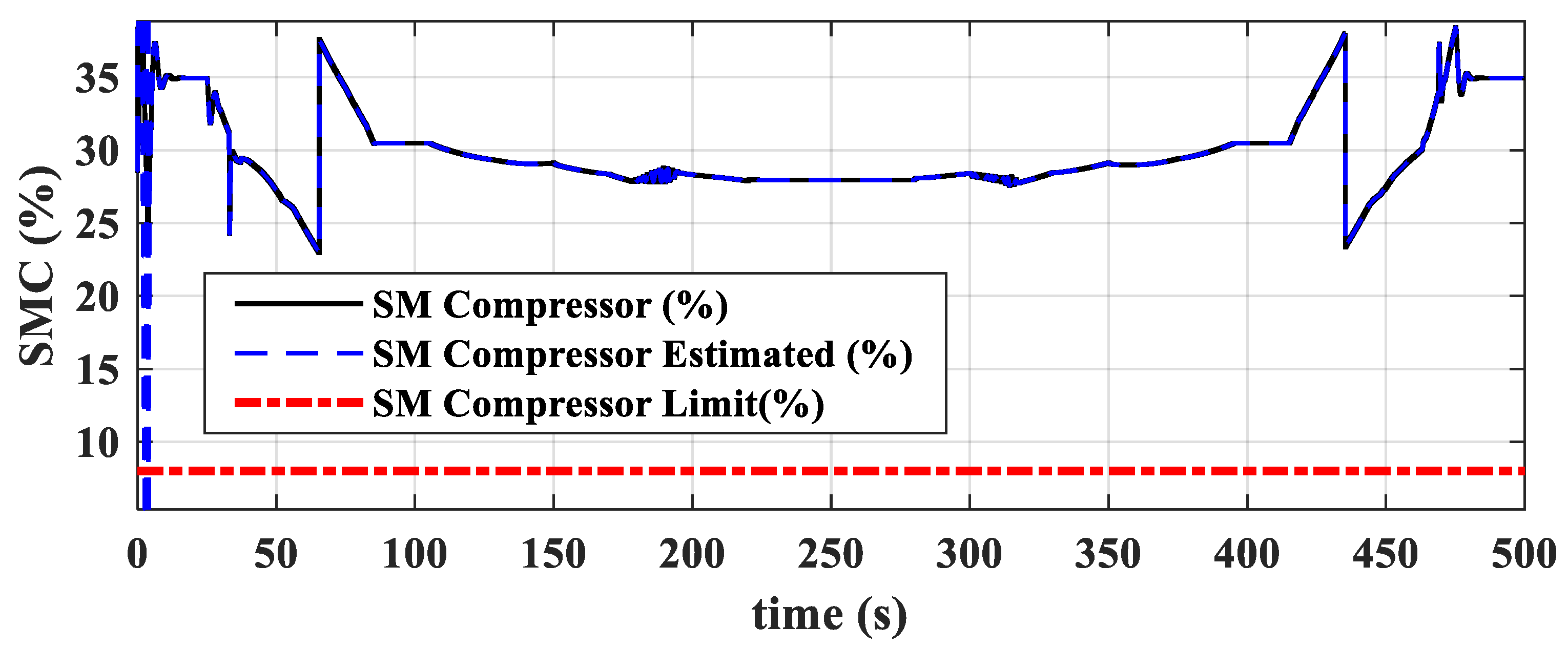
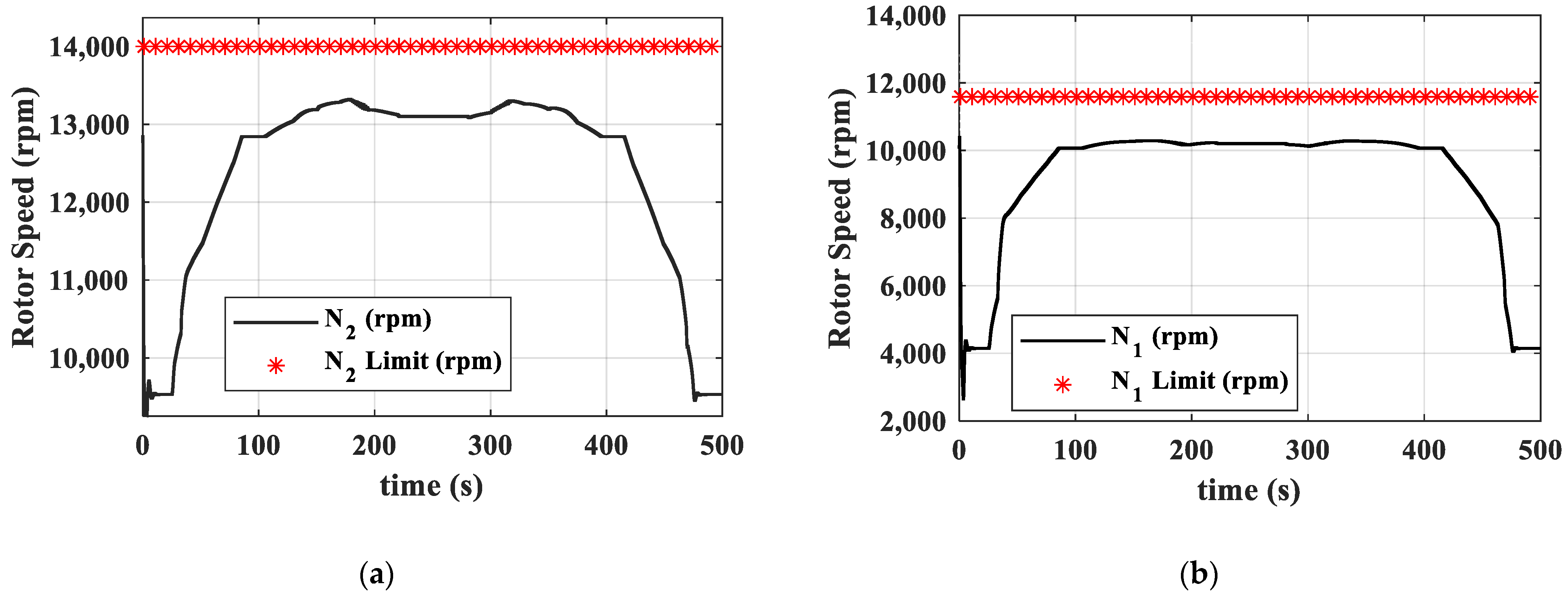
- During external disturbances and changes in flight conditions, this dual-loop control scheme, which uses fuel flow to control thrust and nozzle area to control turbine pressure ratio, effectively ensures thrust command tracking while guaranteeing no overheat (), surge (, , and ), or overspeed (, ).
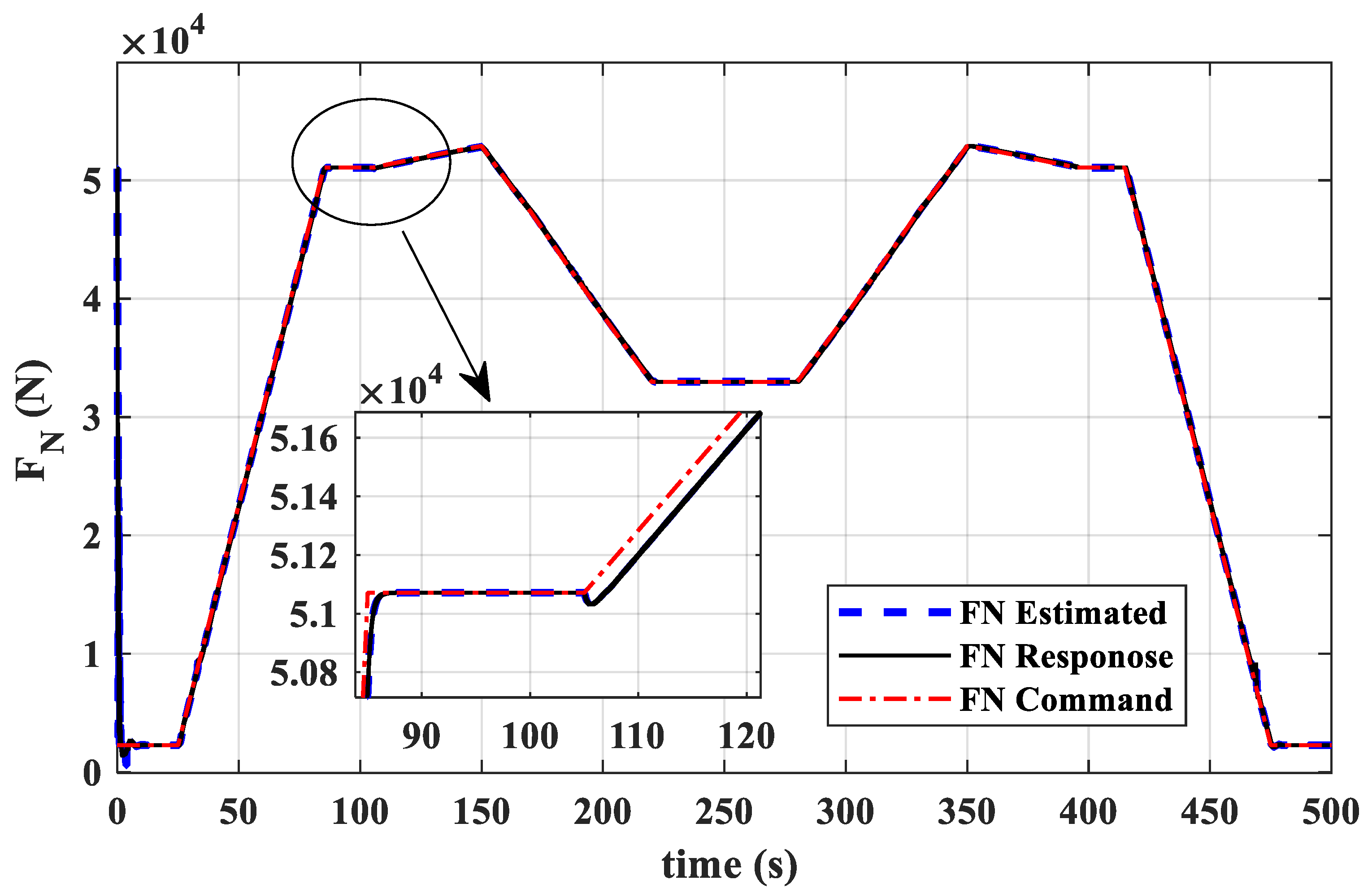
- Compared to the nonlinear model, the proposed thrust estimation algorithm is both fast and accurate, with a maximum relative error in thrust estimation of no more than 0.013%.
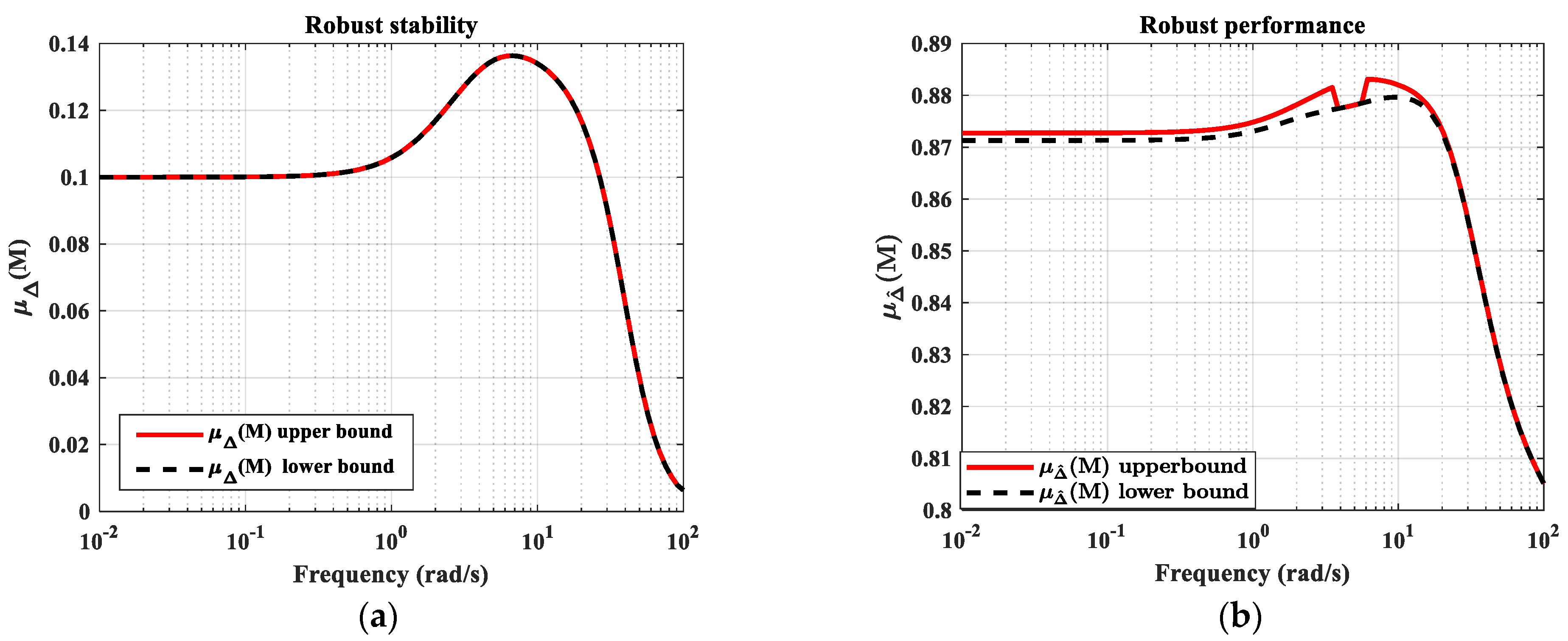
- Within the specified flight envelope, the dual-loop direct thrust μ-synthesis control achieves both servo performance and anti-disturbance capabilities for direct thrust control, with a maximum steady-state thrust relative error of less than 0.1%. The designed μ-synthesis controller demonstrates robust stability and performance within the uncertainty range, both stability and performance indicators below 1.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| LQ | Linear quadratic | AI | Artificial intelligence |
| UIO | Unknown input observer | PI | Proportional–integral |
| LPV | Linear parameter varying | x | State variable vector |
| Differential of x | f | Nonlinear functions | |
| u | Input variable vector | y | Output variable vector |
| g | Output nonlinear functions | N | Engine rotor speed (unit: rpm) |
| W | Mass flow rate (unit: kg/s) | A | Cross-section area (unit: m2) |
| F | Thrust (unit: N) | Pressure ratio | |
| V | Velocity (unit: m/s) | SM | Surge margin (unit: %) |
| TM | Transformation matrix | G | Linear model |
| A | State matrix | B | Input matrix |
| C | Output matrix | D | Feed-forward matrix |
| T | Total temperature (unit: K) | P | Total pressure (unit: kPa) |
| Efficiency | k | Air insulation index | |
| kg | Gas insulation index | FAR | Fuel–air ratio |
| Fun | Integral component nonlinear function | Cp | Constant-pressure specific heat capacity (unit: J/K) |
| H | Calorific value (unit: J/kg) | Velocity coefficient | |
| Total pressure recovery factor | R | Air constant (unit: J*kg/K) | |
| CV | Velocity correction coefficient | Unstructured uncertainty matrix | |
| Rg | Gas constant (unit: J*kg/K) | z | Performance evaluation vector |
| W | Weighting function matrix | ru | Relative uncertainty |
| r | Reference input vector | Performance adjustment factors | |
| d | External disturbance input vector | Control energy suppression adjustment factor | |
| Frequency (unit: rad/s) | Weighting function adjustment factor | ||
| rpm | Revolutions per minute | ||
| subscript | |||
| N | Net | T | Turbine |
| ex | Exception | x | State |
| u | Input | y | Output |
| design | Design point | f | Fuel |
| inte | Integrator | Aug | Augmented |
| P | Performance matrix | I | Input uncertainty |
| K | Controller | fanduct | Fan bypass component |
| cor | Corrected | extr | Extracted air flow rate |
| fancore | Fan core component | n | Nozzle |
| hpc | High-pressure compressor | amb | Ambient |
| hpt | High-pressure turbine | act | Actuator |
| lpt | Low-pressure turbine | cool | Cooling air flow rate |
| cr | Critical | s | Static |
| ref | Reference | ||
References
- Dennis, C.; Sanjay, G.; Hiller, S.-J.; Horn, W.; Kumar, A.; Mathews, H.K.; Moustapha, H.; Pfoertner, H.; Rosenfeld, T.; Rybarik, P.; et al. More Intelligent Gas Turbine Engines; North Atlantic Treaty Organisation: Brussels, Belgium, 2009; ISBN 978-92-837-0080-7. [Google Scholar]
- Hanz, R. Advanced Control of Turbofan Engines; Springer: New York, NY, USA, 2011; ISBN 978-1-4614-1171-0. [Google Scholar]
- Wang, X.; Yang, S.-B.; Zhu, M.-Y.; Kong, X.-X. Aeroengine Control Principles; Science Press: Beijing, China, 2021; ISBN 978-7-03-069605-2. [Google Scholar]
- Jack, D.M.; William, H.H.; David, T.P. Aircraft Engine Design, 2nd ed.; AIAA: Reston, VA, ISA, 2002; ISBN 978-1-56347-538-2. [Google Scholar]
- Zhao, H.; Liao, Z.; Liu, J.; Li, M.; Liu, W.; Wang, L.; Song, Z. A Highly Robust Thrust Estimation Method with Dissimilar Redundancy Framework for Gas Turbine Engine. Energy 2022, 245, 123255. [Google Scholar] [CrossRef]
- Wei, Z.; Zhang, S.; Jafari, S.; Nikolaidis, T. Gas Turbine Aero-Engines Real Time on-Board Modelling: A Review, Research Challenges, and Exploring the Future. Prog. Aerosp. Sci. 2020, 121, 100693. [Google Scholar] [CrossRef]
- Litt, J.S. An Optimal Orthogonal Decomposition Method for Kalman Filter-Based Turbofan Engine Thrust Estimation. J. Eng. Gas Turbine Power 2007, 130, 011601. [Google Scholar] [CrossRef]
- Litt, J.S.; Sowers, T.S.; Corporation, A.; Garg, S. A Retro-Fit Control Architecture to Maintain Engine Performance with Usage. In Proceedings of the 18th ISABE Conference, Beijing, China, 2–7 September 2007. [Google Scholar]
- Lu, F.; Gao, T.; Huang, J.; Qiu, X. A Novel Distributed Extended Kalman Filter for Aircraft Engine Gas-Path Health Estimation with Sensor Fusion Uncertainty. Aerosp. Sci. Technol. 2019, 84, 90–106. [Google Scholar] [CrossRef]
- Lu, F.; Li, Z.; Huang, J.; Jia, M. Hybrid State Estimation for Aircraft Engine Anomaly Detection and Fault Accommodation. AIAA J. 2020, 58, 1748–1762. [Google Scholar] [CrossRef]
- Villarreal-Valderrama, F.; Santana Delgado, C.; Zambrano-Robledo, P.D.C.; Amezquita-Brooks, L. Turbojet Direct-Thrust Control Scheme for Full-Envelope Fuel Consumption Minimization. Aircr. Eng. Aerosp. Technol. 2020, 93, 437–447. [Google Scholar] [CrossRef]
- Sheng, H.; Zhang, T. Aircraft Engine Thrust Estimator Design Based on GSA-LSSVM. Int. J. Turbo Jet Engines 2017, 34, 279–285. [Google Scholar] [CrossRef]
- Su, W.; Zhao, Y.; Sun, J. Novel Weighted Least Squares Support Vector Regression for Thrust Estimation on Performance Deterioration of Aero-Engine. Trans. Nanjing Univ. Aeronaut. Astronaut. 2012, 29, 25–32. [Google Scholar]
- Baklacioglu, T. Metaheuristic and Machine Learning Models for TFE-731-2, PW4056, and JT8D-9 Cruise Thrust. Int. J. Turbo Jet Engines 2017, 34, 221–232. [Google Scholar] [CrossRef]
- Zhao, Y.-P.; Hu, Q.-K.; Xu, J.-G.; Li, B.; Huang, G.; Pan, Y.-T. A Robust Extreme Learning Machine for Modeling a Small-Scale Turbojet Engine. Appl. Energy 2018, 218, 22–35. [Google Scholar] [CrossRef]
- Song, H.-Q.; Li, B.-W.; Zhu, F.-X. Research on Aero-Engine Thrust Estimate Based on Extreme Learning Machine. In Proceedings of the 2016 IEEE Advanced Information Management, Communicates, Electronic and Automation Control Conference (IMCEC), Xi’an, China, 3–5 October 2017; pp. 1170–1174. [Google Scholar]
- Zhao, Y.-P.; Li, Z.-Q.; Hu, Q.-K. A Size-Transferring Radial Basis Function Network for Aero-Engine Thrust Estimation. Eng. Appl. Artif. Intell. 2020, 87, 103253. [Google Scholar] [CrossRef]
- Li, Z.-Q.; Zhao, Y.-P.; Cai, Z.-Y.; Xi, P.-P.; Pan, Y.-T.; Huang, G.; Zhang, T.-H. A Proposed Self-Organizing Radial Basis Function Network for Aero-Engine Thrust Estimation. Aerosp. Sci. Technol. 2019, 87, 167–177. [Google Scholar] [CrossRef]
- Wang, B.; Xu, J.; Liu, X.; Zheng, Q. Thrust Estimation for Aero-Engine Based on Deep Convolution Neural Network. IOP Conf. Ser. Mater. Sci. Eng. 2020, 752, 012009. [Google Scholar] [CrossRef]
- Zhao, Y.-P.; Chen, Y.-B.; Li, Z.-Q. A Proposed Algorithm Based on Long Short-Term Memory Network and Gradient Boosting for Aeroengine Thrust Estimation on Transition State. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2021, 235, 2182–2192. [Google Scholar] [CrossRef]
- Wang, B. Intelligent Direct Thrust Control of Turbofan Engines based on Mathematical Dynamic Models. Ph.D. Thesis, Beihang University, Beijing, China, 2014. [Google Scholar]
- Zheng, Q.; Miao, L.; Zhang, H.; Ye, Z. On-Board Real-Time Optimization Control for Turbofan Engine Thrust under Flight Emergency Condition. Proc. Inst. Mech. Eng. Part J. Syst. Control Eng. 2017, 231, 554–566. [Google Scholar] [CrossRef]
- Zheng, Q.; Pang, S.; Zhang, H.; Hu, Z. A Study on Aero-Engine Direct Thrust Control with Nonlinear Model Predictive Control Based on Deep Neural Network. Int. J. Aeronaut. Space Sci. 2019, 20, 933–939. [Google Scholar] [CrossRef]
- Zheng, Q.; Du, Z.; Fu, D.; Hu, Z.; Zhang, H. Direct Thrust Inverse Control of Aero-Engine Based on Deep Neural Network. Int. J. Turbo Jet-Engines 2021, 38, 391–396. [Google Scholar] [CrossRef]
- Jin, C.; Zheng, Q.; Zhang, H.; Fang, J.; Hu, Z. Direct Thrust Predictive Control of Aeroengine Based on Compact Propulsion System Dynamic Model-State Variable Model. J. Propuls. Technol. 2022, 43, 354–363. [Google Scholar] [CrossRef]
- Zhu, Y.; Huang, J.; Pan, M.; Zhou, W. Direct Thrust Control for Multivariable Turbofan Engine Based on Affine Linear Parameter-Varying Approach. Chin. J. Aeronaut. 2022, 35, 125–136. [Google Scholar] [CrossRef]
- Liu, J.; Wang, X.; Liu, X.; Zhu, M.; Pei, X.; Dan, Z.; Zhang, S. μ-Synthesis-based Robust L1 Adaptive Control for Aeropropulsion System Test Facility. Aerosp. Sci. Technol. 2023, 140, 108457. [Google Scholar] [CrossRef]
- Gu, D.-W.; Petkov, P.H.; Konstantinov, M.M. Robust Control Design with MATLAB®; Advanced Textbooks in Control and Signal Processing; Springer: London, UK, 2013; ISBN 978-1-4471-4681-0. [Google Scholar]
- Liu, J.; Wang, X.; Zhu, M.; Miao, K. Multi-Variable Adaptive Control Method for Turbofan Engine with Dynamic and Input Uncertainties. J. Eng. Gas Turbine Power 2021, 143, 071027. [Google Scholar] [CrossRef]
- Shi, Y.; Zhao, J. Supervisory Control of Multiple Switching Laws with Performance Guidance for Aeroengines. IEEE Trans. Control Syst. Technol. 2019, 27, 2557–2564. [Google Scholar] [CrossRef]
- Xiao, L. Aeroengine Multivariable Nonlinear Tracking Control Based on Uncertainty and Disturbance Estimator. J. Eng. Gas Turbine Power 2014, 136, 121601. [Google Scholar] [CrossRef]
- Liu, J.; Wang, X.; Liu, X.; Pei, X.; Dan, Z.; Zhang, S.; Yang, S.; Zhang, L. An Anti-windup Design with Local Sector and H2/H∞ Optimization for Flight Environment Simulation System. Aerosp. Sci. Technol. 2022, 128, 107787. [Google Scholar] [CrossRef]
- Liu, J.; Wang, X.; Liu, X.; Zhu, M.; Pei, X.; Zhang, S.; Dan, Z. μ-Synthesis Control with Reference Model for Aeropropulsion System Test Facility Under Dynamic Coupling and Uncertainty. Chin. J. Aeronaut. 2023, 36, 246–261. [Google Scholar] [CrossRef]
- Wang, H.; Guo, Y.; Lu, J.; Li, G. Research of aero-engine two degrees-of-freedom robust controller based on linear matrix inequality approach. J. Aerosp. Power 2009, 24, 1413–1419. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Long, Y.; Wang, X.; Zhao, W.; Liu, J. Dual-Loop μ-Synthesis Direct Thrust Control for Turbofan Engines. Symmetry 2024, 16, 944. https://doi.org/10.3390/sym16080944
Long Y, Wang X, Zhao W, Liu J. Dual-Loop μ-Synthesis Direct Thrust Control for Turbofan Engines. Symmetry. 2024; 16(8):944. https://doi.org/10.3390/sym16080944
Chicago/Turabian StyleLong, Yifu, Xi Wang, Wenshuai Zhao, and Jiashuai Liu. 2024. "Dual-Loop μ-Synthesis Direct Thrust Control for Turbofan Engines" Symmetry 16, no. 8: 944. https://doi.org/10.3390/sym16080944
APA StyleLong, Y., Wang, X., Zhao, W., & Liu, J. (2024). Dual-Loop μ-Synthesis Direct Thrust Control for Turbofan Engines. Symmetry, 16(8), 944. https://doi.org/10.3390/sym16080944