

Study of Stability and Simulation for Nonlinear (k, ψ)-Fractional Differential Coupled Laplacian Equations with Multi-Point Mixed (k, ψ)-Derivative and Symmetric Integral Boundary Conditions


{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Preliminaries
- ;
- ;
- .
- ;
- .
- If , then , and is increasing with respect to ϑ;
- For all , ;
- If , then , for all ;
- For all , ;
- Here, ;
- ;
- .
- , ;
- is compact and continuous;
- is a contraction mapping.
- , ,
- ,
- .
3. Existence and Uniqueness of Solution
- , , and , , , .
- ; for all , , there exist some functions such that
- ; for all , there exists two constants such that
- , and , where
- ; for all , there exist some constants and with such that
- , and , whereand
- ; for all , there exist some constants and with such that
- , and .
- , and .
4. GUH Stability
- and , ;
- , ;
- , ;
- , , ,;
- , , ,.
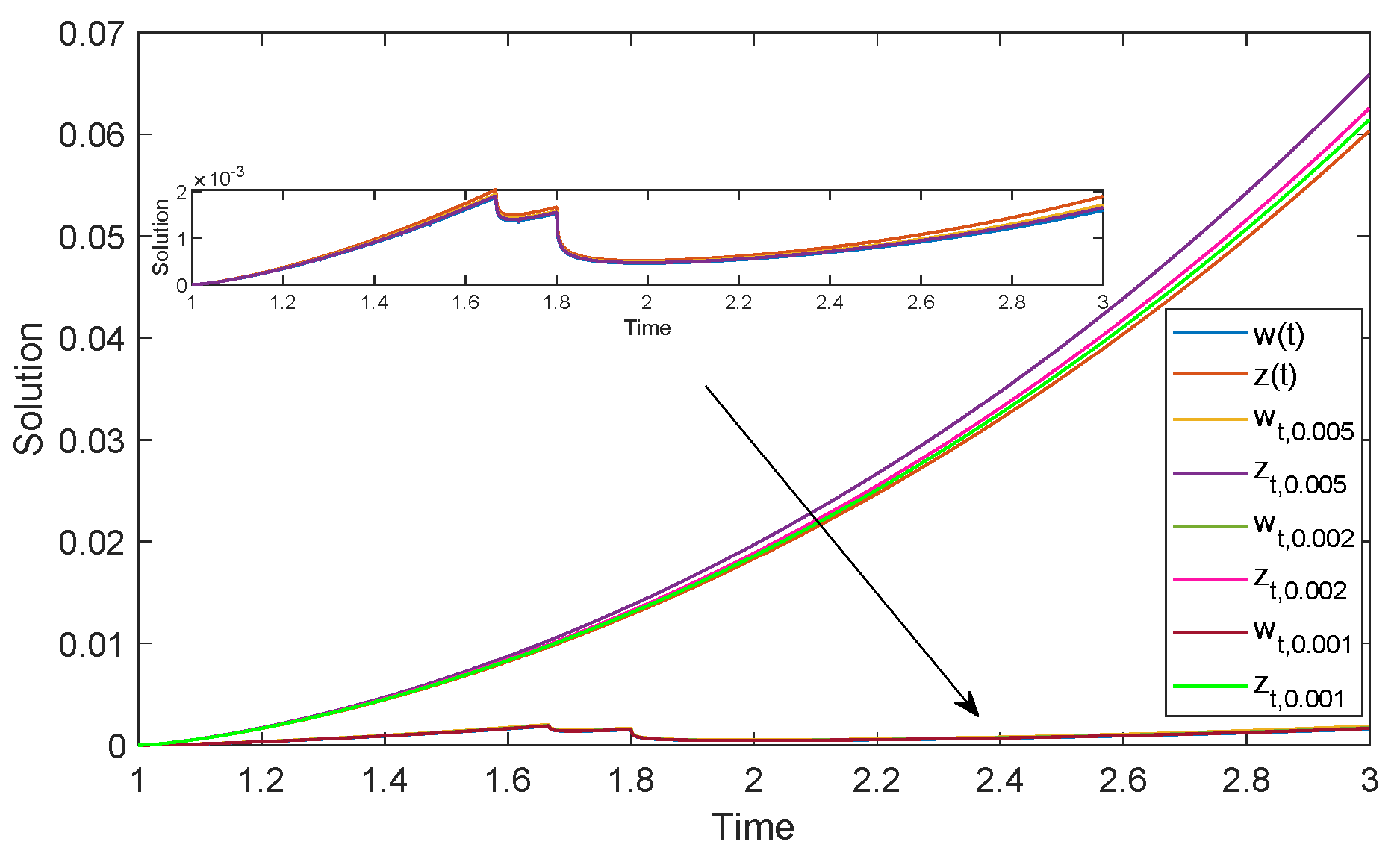
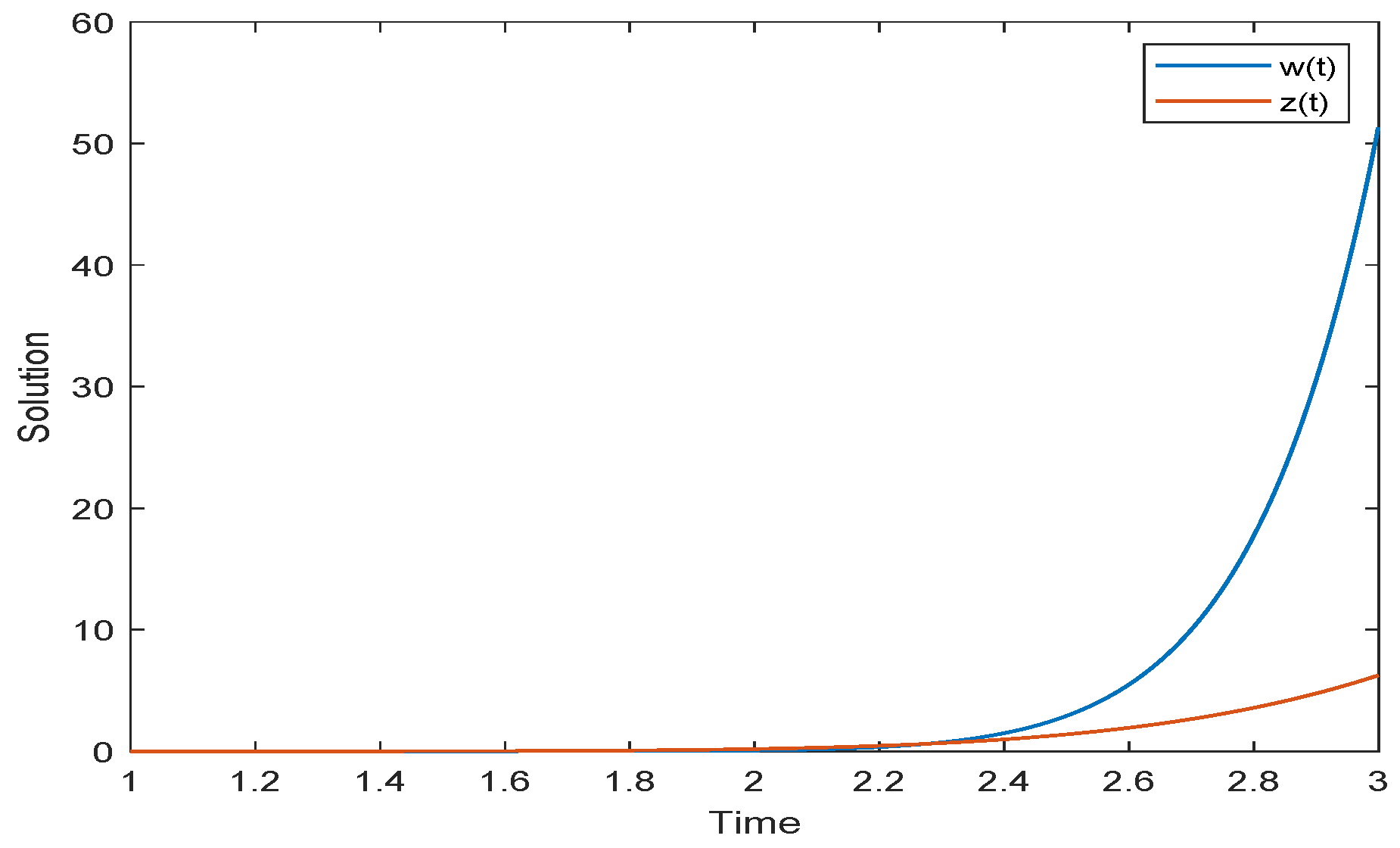
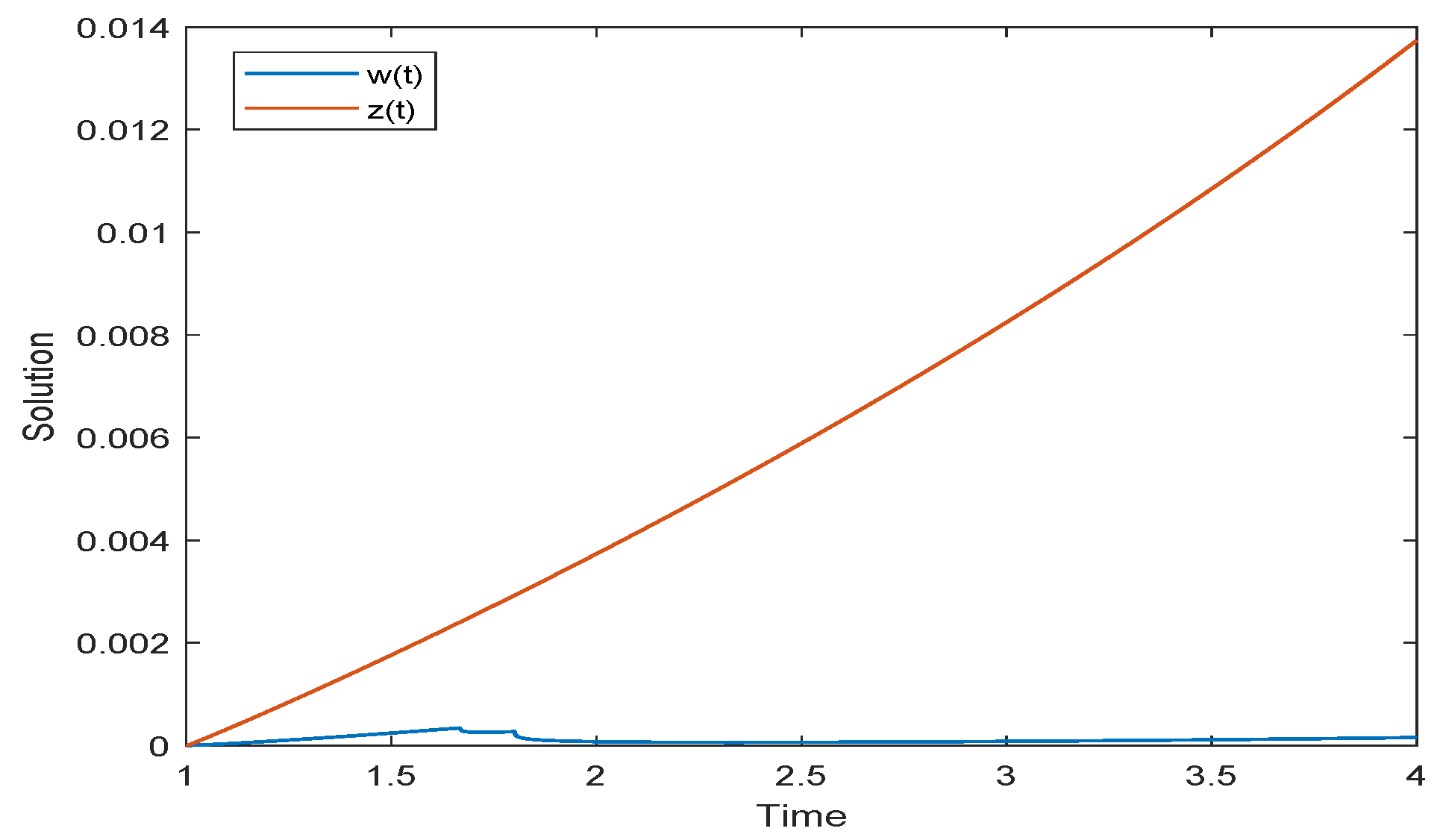
5. Examples and Simulations
6. Conclusions
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Dineshkumar, C.; Udhayakumar, R.; Vijayakumar, V.; Nisar, K. A discussion on the approximate controllability of Hilfer fractional neutral stochastic integro-differential systems. Chaos Solitons Fractals 2020, 142, 110472. [Google Scholar] [CrossRef]
- Baleanu, D.; Jajarmi, A.; Mohammadi, H.; Rezapour, S. A new study on the mathematical modelling of human liver with Caputo-Fabrizio fractional derivative. Chaos Solitons Fractals 2020, 134, 109705. [Google Scholar] [CrossRef]
- Lv, X.; Zhao, K.; Xie, H. Ulam-Hyers Stability and Simulation of a Delayed Fractional Differential Equation with Riemann-Stieltjes Integral Boundary Conditions and Fractional Impulses. Axioms 2024, 13, 682. [Google Scholar] [CrossRef]
- Muthaiah, S.; Murugesan, M.; Awadalla, M.; Unyong, B.; Egami, R. Ulam-Hyers stability and existence results for a coupled sequential Hilfer-Hadamard-type integrodifferential system. AIMS Math. 2024, 9, 16203–16233. [Google Scholar] [CrossRef]
- Tudorache, A.; Luca, R. Systems of Hilfer-Hadamard Fractional Differential Equations with Nonlocal Coupled Boundary Conditions. Fractal Fract. 2023, 7, 816. [Google Scholar] [CrossRef]
- Zhao, K. Study on the stability and its simulation algorithm of a nonlinear impulsive ABC-fractional coupled system with a Laplacian operator via F-contractive mapping. Adv. Contin. Discret. Model 2024, 2024, 5. [Google Scholar] [CrossRef]
- Díaz, R.; Pariguan, E. On hypergeometric functions and Pochhammer k-symbol. Divulg. Mat. 2007, 15, 179–192. [Google Scholar]
- Mubeen, S.; Habibullah, G. k-fractional integrals and application. Int. J. Contemp. Math. Sci. 2012, 2, 89–94. [Google Scholar]
- Dorrego, G. An alternative definition for the k-Riemann–Liouville fractional derivative. Appl. Math. Sci. 2015, 9, 481–491. [Google Scholar] [CrossRef]
- Kilbas, A.; Srivastava, H.; Trujillo, J. Theory and Applications of the Fractional Differential Equations; Elsevier: Amsterdam, The Netherlands, 2006; Volume 204. [Google Scholar]
- Sousa, J.; Oliveira, E. On the ψ-Hilfer fractional derivative. Commun. Nonlinear Sci. Numer. Simul. 2018, 60, 72–91. [Google Scholar] [CrossRef]
- Kucche, K.; Mali, A. On the nonlinear (k, ψ)-Hilfer fractional differential equations. Chaos Solitons Fractals 2021, 152, 111335. [Google Scholar] [CrossRef]
- Samadi, A.; Ntouyas, S.; Tariboon, J. Nonlocal Coupled System for (k, ψ)-Hilfer Fractional Differential Equations. Fractal Fract. 2022, 6, 234. [Google Scholar] [CrossRef]
- Kharade, J.; Kucche, K. On the (k, ψ)-Hilfer nonlinear impulsive fractional differential equations. Math. Methods Appl. Sci. 2023, 46, 16282–16304. [Google Scholar] [CrossRef]
- Kamsrisuk, N.; Ntouyas, S.; Ahmad, B.; Samadi, A.; Tariboon, J. Existence results for a coupled system of (k, ψ)-Hilfer fractional differential equations with nonlocal integro-multi-point boundary conditions. AIMS Math. 2023, 8, 4079–4097. [Google Scholar] [CrossRef]
- Samadi, A.; Ntouyas, S.; Ahmad, B.; Samadi, A.; Tariboon, J. On a Coupled Differential System Involving (k, ψ)-Hilfer Derivative and (k, ψ)-Riemann-Liouville Integral Operators. Axioms 2023, 12, 229. [Google Scholar] [CrossRef]
- Samadi, A.; Ntouyas, S.; Tariboon, J. Study on a Nonlocal Fractional Coupled System Involving (k, ψ)-Hilfer Derivatives and (k, ψ)-Riemann-Liouville Integral Operators. Fractal Fract. 2024, 8, 211. [Google Scholar] [CrossRef]
- Leibenson, L. General problem of the movement of a compressible uid in a porous medium. Izv. Akad. Nauk Kirg. SSR Ser. Biol. Nauk 1983, 9, 7–10. [Google Scholar]
- Zhao, K. Solvability, Approximation and Stability of Periodic Boundary Value Problem for a Nonlinear Hadamard Fractional Differential Equation with p-Laplacian. Axioms 2023, 12, 733. [Google Scholar] [CrossRef]
- Khan, H.; Chen, W.; Sun, H. Analysis of positive solution and Hyers-Ulam stability for a class of singular fractional differential equations with p-Laplacian in Banach space. Math. Methods Appl. Sci. 2018, 41, 3430–3440. [Google Scholar] [CrossRef]
- Lv, X.; Zhao, K.; Xie, H. Stability and Numerical Simulation of a Nonlinear Hadamard Fractional Coupling Laplacian System with Symmetric Periodic Boundary Conditions. Symmetry 2024, 16, 774. [Google Scholar] [CrossRef]
- Li, S.; Zhang, Z.; Jiang, W. Multiple positive solutions for four-point boundary value problem of fractional delay differential equations with p-Laplacian operator. Appl. Numer. Math. 2021, 165, 348–356. [Google Scholar] [CrossRef]
- Rao, S.; Ahmadini, A. Multiple positive solutions for system of mixed Hadamard fractional boundary value problems with (p1, p2)-Laplacian operator. AIMS Math. 2023, 8, 14767–14791. [Google Scholar] [CrossRef]
- Zhao, K. Stability of a nonlinear Langevin system of ML-type fractional derivative affected by time-varying delays and differential feedback control. Fractal Fract. 2022, 6, 725. [Google Scholar] [CrossRef]
- Abbas, S.; Benchohra, M.; Lagreg, J.; Alsaedi, A.; Zhou, Y. Existence and Ulam stability for fractional differential equations of Hilfer-Hadamard type. Adv. Differ. Equ. 2017, 2017, 180. [Google Scholar] [CrossRef]
- Ho, V.; Ngo, V. Hyers-Ulam stability of fuzzy fractional Volterra integral equations with the kernel ψ-function via successive approximation method. Fuzzy Set. Syst. 2021, 419, 67–98. [Google Scholar]
- Sousa, J.; Oliveira, E. On the Ulam-Hyers-Rassias stability for nonlinear fractional differential equations using the ψ-Hilfer operator. J. Fixed Point Theory Appl. 2018, 20, 96. [Google Scholar] [CrossRef]
- Zhao, K.; Liu, J.; Lv, X. A unified approach to solvability and stability of multipoint BVPs for Langevin and Sturm–Liouville equations with CH–fractional derivatives and impulses via coincidence Theory. Fractal Fract. 2024, 8, 111. [Google Scholar] [CrossRef]
- Murugesan, M.; Muthaiah, S.; Alzabut, J.; Gopal, T. Existence and H-U stability of a tripled system of sequential fractional differential equations with multipoint boundary conditions. Bound. Value Probl. 2023, 2023, 56. [Google Scholar] [CrossRef]
- Ahmed, A.; Madeaha, A.; Bashir, A. Uniqueness of solutions for a ψ-Hilfer fractional integral boundary value problem with the p-Laplacian operator. Demonstr. Math. 2023, 56, 20220195. [Google Scholar]
- Selvam, A.; Govindaraj, V.; Ahmad, H. Examining reachability criteria for fractional dynamical systems with mixed delays in control utilizing ψ-Hilfer pseudo-fractional derivative. Chaos Solitons Fractals 2024, 181, 114702. [Google Scholar] [CrossRef]
- Abbas, S.; Benchohra, M.; Zhou, Y. Coupled Hilfer fractional differential systems with random effects. Adv. Differ. Equ. 2018, 2018, 369. [Google Scholar] [CrossRef]

Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lv, X.; Zhao, K. Study of Stability and Simulation for Nonlinear (k, ψ)-Fractional Differential Coupled Laplacian Equations with Multi-Point Mixed (k, ψ)-Derivative and Symmetric Integral Boundary Conditions. Symmetry 2025, 17, 472. https://doi.org/10.3390/sym17030472
Lv X, Zhao K. Study of Stability and Simulation for Nonlinear (k, ψ)-Fractional Differential Coupled Laplacian Equations with Multi-Point Mixed (k, ψ)-Derivative and Symmetric Integral Boundary Conditions. Symmetry. 2025; 17(3):472. https://doi.org/10.3390/sym17030472
Chicago/Turabian StyleLv, Xiaojun, and Kaihong Zhao. 2025. "Study of Stability and Simulation for Nonlinear (k, ψ)-Fractional Differential Coupled Laplacian Equations with Multi-Point Mixed (k, ψ)-Derivative and Symmetric Integral Boundary Conditions" Symmetry 17, no. 3: 472. https://doi.org/10.3390/sym17030472
APA StyleLv, X., & Zhao, K. (2025). Study of Stability and Simulation for Nonlinear (k, ψ)-Fractional Differential Coupled Laplacian Equations with Multi-Point Mixed (k, ψ)-Derivative and Symmetric Integral Boundary Conditions. Symmetry, 17(3), 472. https://doi.org/10.3390/sym17030472