
Symbolic and Iterative Computation of Quasi-Filiform Nilpotent Lie Algebras of Dimension Nine



Abstract
:
1. Introduction
1.1. State of the Art
1.2. Terminology
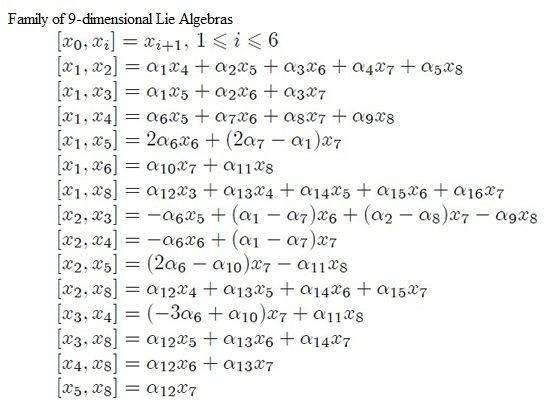
2. Structure Theorem


{kind=link}
{kind=link}
| (1) | |
| (2) | |
| (3) | |
| (4) | |
| (5) | |
| (6) | |
| (7) | |
| (8) | |
| (9) | |
| (10) | |
| (11) | |
| (12) | |
| (13) | |
| (14) | |
| (15) | |
| (16) | |
| (17) | |
| (18) | |
| (19) | |
| (20) | |
| (21) | |
| (22) | |
| (23) | |
| (24) | |
| (25) | |
| (26) | |
| (27) |
| (28) | |
| (29) | |
| (30) | |
| (31) | |
| (32) | |
| (33) | |
| (34) | |
| (35) | |
| (36) | |
| (37) | |
| (38) | |
| (39) | |
| (40) | |
| (41) | |
| (42) | |
| (43) | |
| (44) | |
| (45) | |
| (46) | |
| (47) | |
| (48) | |
| (49) | |
| (50) | |
| (51) | |
| (52) | |
| (53) | |
| (54) | |
| (55) |
3. Concluding Remarks
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Gilmore, R. Lie Groups, Lie Algebras, and Some of Their Applications; Dover Publications: Mineola, NY, USA, 2005. [Google Scholar]
- Sattinger, D.H.; Weaver, O.L. Lie Groups and Algebras with Applications to Physics, Geometry and Mechanics; Springer-Verlag New York Inc.: New York, NY, USA, 1986. [Google Scholar]
- Yao, Y.; Ji, J.; Chen, D.; Zeng, Y. The quadratic-form identity for constructing the Hamiltonian structures of the discrete integrable systems. Comput. Math. Appl. 2008, 56, 2874–2882. [Google Scholar] [CrossRef]
- Benjumea, J.C.; Echarte, F.J.; Núñez, J.; Tenorio, A.F. A Method to Obtain the Lie Group Associated With a Nilpotent Lie Algebra. Comput. Math. Appl. 2006, 51, 1493–1506. [Google Scholar] [CrossRef]
- Georgi, H. Lie Algebras in Particle Physics: From Isospin to Unified Theories (Frontiers in Physics); Westview Press: Boulder, CO, USA, 1999. [Google Scholar]
- Brockett, R.W. Lie algebras and Lie groups in control theory. In Geometric Methods in System Theory, ser. NATO Advanced Study Institutes Series; Mayne, D., Brockett, R., Eds.; Springer: Amsterdam, The Netherlands, 1973; Volume 3, pp. 43–82. [Google Scholar]
- Sachkov, Y. Control Theory on Lie Groups. J. Math. Sci. 2009, 156, 381–439. [Google Scholar] [CrossRef]
- Zimmerman, J. Optimal control of the Sphere Sn Rolling on En. Math. Control Signals Syst. 2005, 17, 14–37. [Google Scholar] [CrossRef]
- Malcev, A.I. On semi-simple subgroups of Lie groups. Izv. Akad. Nauk SSSR Ser. Mat. 1944, 8, 143–174. [Google Scholar]
- Malcev, A.I. On solvable Lie algebras. Izv. Akad. Nauk SSSR Ser. Mat. 1945, 9, 329–356. [Google Scholar]
- Onishchik, A.L.; Vinberg, E.B. Lie Groups and Algebraic Groups III, Structure of Lie Groups and Lie Algebras; Springer-Verlag: Berlin, Germany; Heidelberg, Germany, 1994. [Google Scholar]
- Goze, M.; Khakimdjanov, Y. Nilpotent Lie Algebras; Kluwer Academic Publishers: Dordrecht, The Netherlands, 1996. [Google Scholar]
- Umlauf, K.A. Über die Zusammensetzung der Endlichen Continuenlichen Transformationsgruppen, Insbesondere der Gruppen vom Range Null. Ph.D. Thesis, University of Leipzig, Leipzig, Germany, 1891. [Google Scholar]
- Ancochea, J.M.; Goze, M. Sur la classification des algèbres de Lie nilpotentes de dimension 7. C. R. Acad. Sci. Paris 1986, 302, 611–613. [Google Scholar]
- Ancochea, J.M.; Goze, M. On the varieties of nilpotent Lie algebras of dimension 7 and 8. J. Pure Appl. Algebra 1992, 77, 131–140. [Google Scholar]
- Gómez, J.R.; Echarte, F.J. Classification of complex filiform Lie algebras of dimension 9. Rend. Sem. Fac. Sc. Univ. Cagliari 1991, 61, 21–29. [Google Scholar]
- Gómez, J.R.; Jiménez-Merchán, A.; Khakimdjanov, Y. Symplectic Structures on the Filiform Lie Algebras. J. Pure Appl. Algebra 2001, 156, 15–31. [Google Scholar] [CrossRef]
- Boza, L.; Fedriani, E.M.; Nuñez, J. Complex Filiform Lie Algebras of Dimension 11. Appl. Math. Comput. 2003, 141, 611–630. [Google Scholar] [CrossRef]
- Echarte, F.J.; Núñez, J.; Ramírez, F. Relations among invariants of complex filiform Lie algebras. Appl. Math. Comput. 2004, 147, 365–376. [Google Scholar] [CrossRef]
- Echarte, F.J.; Nuñez, J.; Ramirez, F. Description of Some Families of Filiform Lie Algebras. Houst. J. Math. 2008, 34, 19–32. [Google Scholar]
- Benjumea, J.C.; Nuñez, J.; Tenorio, A.F. Computing the Law of a Family of Solvable Lie Algebras. Int. J. Algebra Comput. 2009, 19, 337–345. [Google Scholar] [CrossRef]
- Burde, D.; Eick, B.; de Graaf, W. Computing faithful representations for nilpotent Lie algebras. J. Algebra 2009, 322, 602–612. [Google Scholar] [CrossRef]
- Ceballos, M.; Nuñez, J.; Tenorio, A.F. The Computation of Abelian Subalgebras in Low-Dimensional Solvable Lie Algebras. WSEAS Trans. Math. 2010, 9, 22–31. [Google Scholar]
- Cabezas, J.M.; Gómez, J.R.; Jiménez-Merchán, A. Family of p-filiform Lie algebras. In Algebra and Operator Theory: Proceedings of the Colloquium in Taskent (Uzbekistan); Kluwer Academic Publishers: Dordrecht, The Netherlands, 1997; pp. 93–102. [Google Scholar]
- Camacho, L.M.; Gómez, J.R.; González, A.; Omirov, B.A. Naturally Graded Quasi-Filiform Leibniz Algebras. J. Symb. Comput. 2009, 44, 27–539. [Google Scholar] [CrossRef]
- Camacho, L.M. Álgebras de Lie P-Filiformes. Ph.D. Thesis, Universidad de Sevilla, Seville, Spain, 1999. [Google Scholar]
- Ancochea, J.M.; Campoamor, O.R. Classification of (n-5)-filiform Lie Algebras. Linear Algebra Appl. 2001, 336, 167–180. [Google Scholar] [CrossRef]
- Eick, B. Some new simple Lie algebras in characteristic 2. J. Symb. Comput. 2010, 45, 943–951. [Google Scholar] [CrossRef]
- Schneider, C. A Computer-Based Approach to the Classification of Nilpotent Lie Algebras. Exp. Math. 2005, 14, 153–160. [Google Scholar] [CrossRef]
- Sendra, J.R.; Perez-Diaz, S.; Sendra, J.; Villarino, C. Introducción a la Computación Simbólica y Facilidades Maple; Addlink Media: Madrid, Spain, 2009. [Google Scholar]
- Pérez, M.; Pérez, F.; Jiménez, E. Classification of the Quasifiliform Nilpotent Lie Algebras of Dimension 9. J. Appl. Math. 2014, 2014, 1–12. [Google Scholar] [CrossRef]
- Pérez, F. Clasificación de las Álgebras de Lie Cuasifiliformes de Dimensión 9. Ph.D. Thesis, Universidad de Sevilla, Seville, Spain, 2007. [Google Scholar]
- Bäuerle, G.G.A.; De Kerf, E.A. Lie Algebras Part 1, Studies in Mathematical Physics 1; Elsevier: Amsterdam, The Netherlands, 1990. [Google Scholar]
- Benjumea, J.C.; Fernandez, D.; Márquez, M.C.; Nuñez, J.; Vilches, J.A. Matemáticas Avanzadas y Estadística para Ciencias e Ingenierías; Secretariado de Publicaciones de la Universidad de Sevilla: Sevilla, Spain, 2006. [Google Scholar]
- Erdmann, K.; Wildon, M.J. Introduction to Lie Algebras; Springer: Berlin, Germany; Heidelberg, Germany, 2006. [Google Scholar]
- Jacobson, N. Lie Algebras; Dover Publications, Inc.: Mineola, NY, USA, 1979. [Google Scholar]
- Onishchik, A.L.; Arkadij, L.; Vinberg, E.B. Lie Groups and Algebraic Groups; Springer-Verlag: Berlin, Germany; Heidelberg, Germany, 1990. [Google Scholar]
- Agrachev, A.; Sachkov, Y. Control Theory from the Geometric Viewpoint; Springer: Berlin, Germany; Heidelberg, Germany, 2004. [Google Scholar]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pérez, M.; Pérez, F.; Jiménez, E. Symbolic and Iterative Computation of Quasi-Filiform Nilpotent Lie Algebras of Dimension Nine. Symmetry 2015, 7, 1788-1802. https://doi.org/10.3390/sym7041788
Pérez M, Pérez F, Jiménez E. Symbolic and Iterative Computation of Quasi-Filiform Nilpotent Lie Algebras of Dimension Nine. Symmetry. 2015; 7(4):1788-1802. https://doi.org/10.3390/sym7041788
Chicago/Turabian StylePérez, Mercedes, Francisco Pérez, and Emilio Jiménez. 2015. "Symbolic and Iterative Computation of Quasi-Filiform Nilpotent Lie Algebras of Dimension Nine" Symmetry 7, no. 4: 1788-1802. https://doi.org/10.3390/sym7041788
APA StylePérez, M., Pérez, F., & Jiménez, E. (2015). Symbolic and Iterative Computation of Quasi-Filiform Nilpotent Lie Algebras of Dimension Nine. Symmetry, 7(4), 1788-1802. https://doi.org/10.3390/sym7041788