
Relaxation Limit of the Aggregation Equation with Pointy Potential


{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Convergence Result
2.1. Notations
2.2. Convergence Estimates
3. Numerical Discretization
- (i)
- W is even and ;
- (ii)
- ;
- (iii)
- W is -convex, i.e., there exists such that is convex;
- (iv)
- W is -lipschitz continuous for some .
3.1. A Splitting Algorithm
3.2. Well-Balanced Discretization
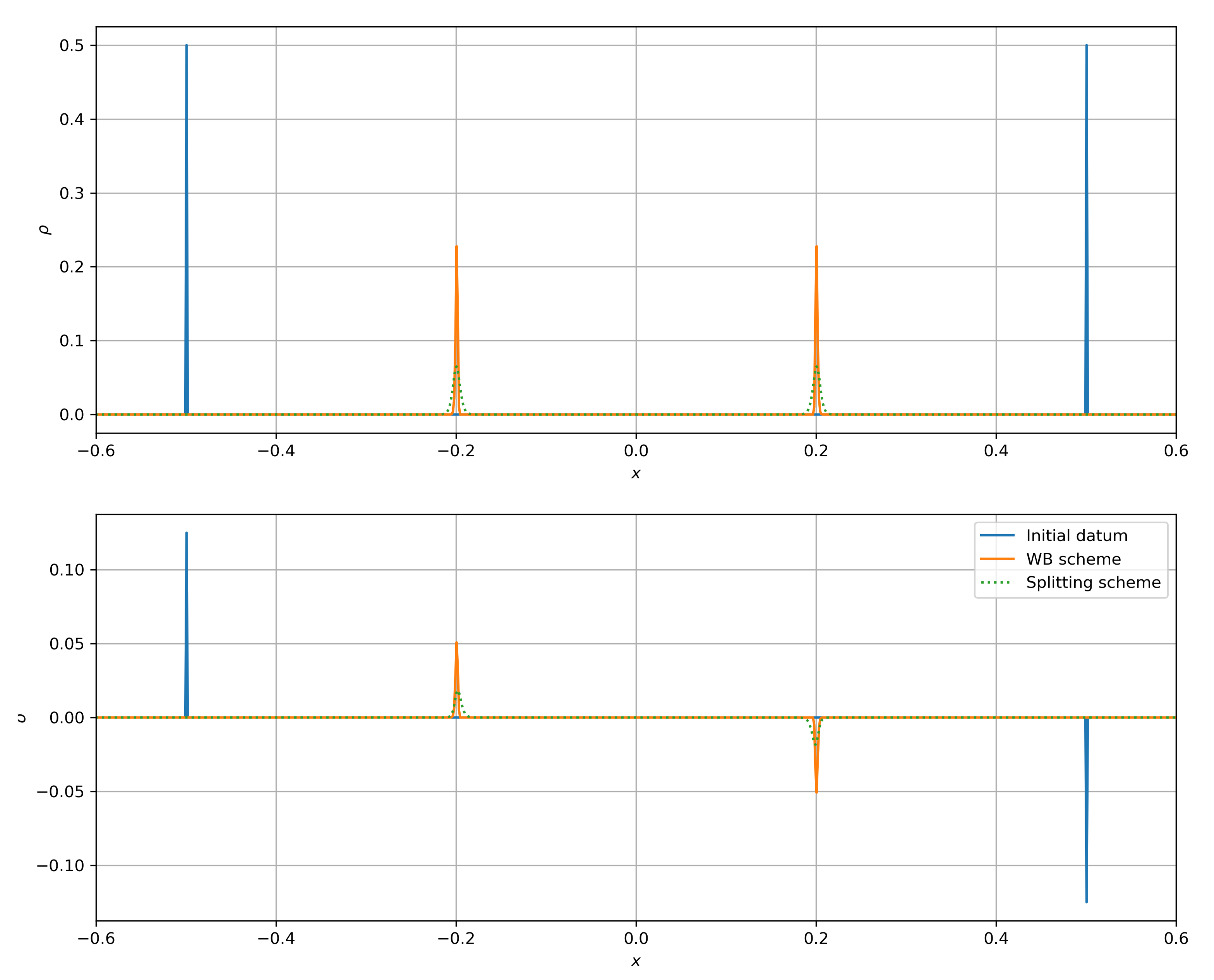
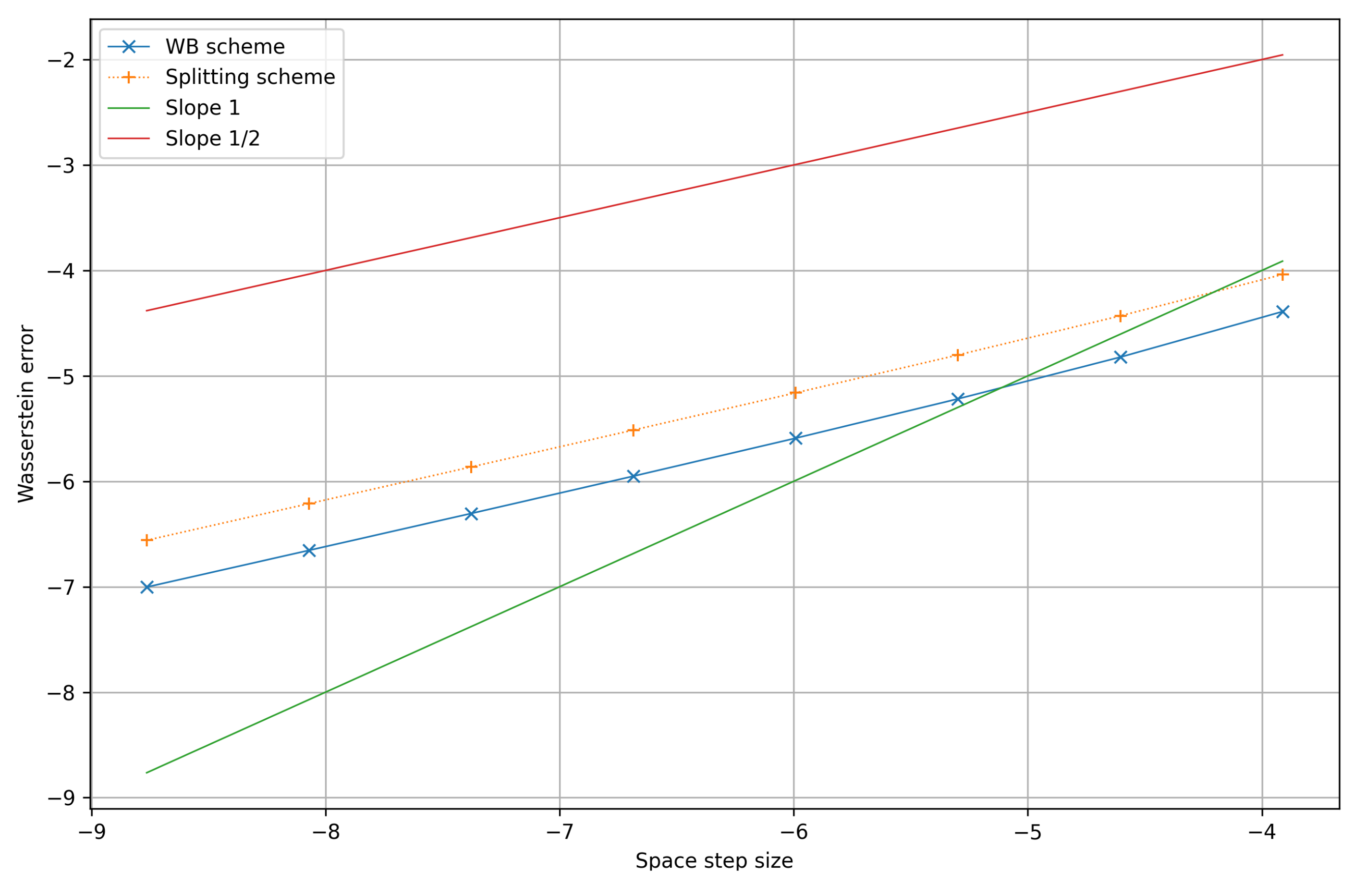
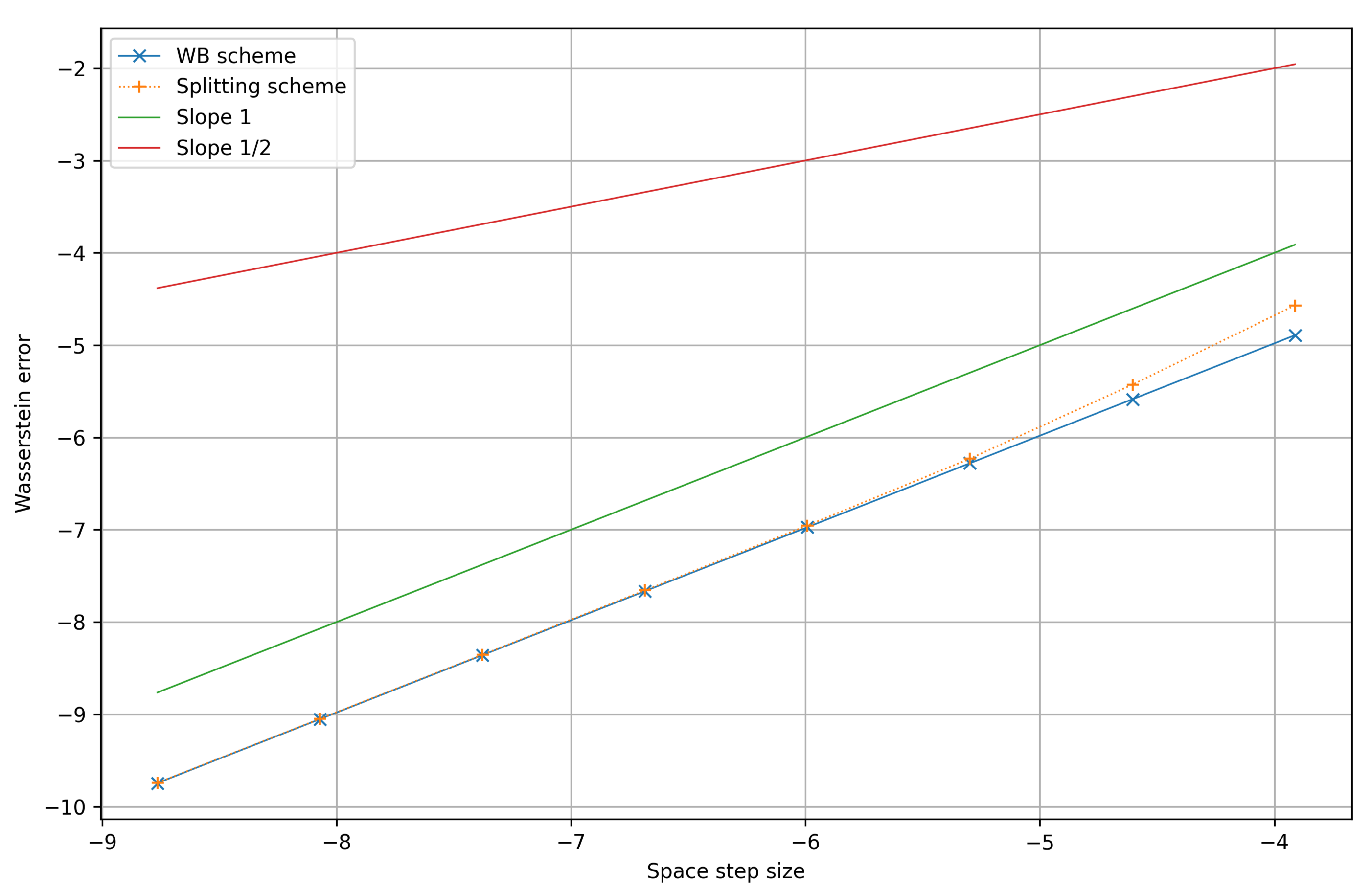
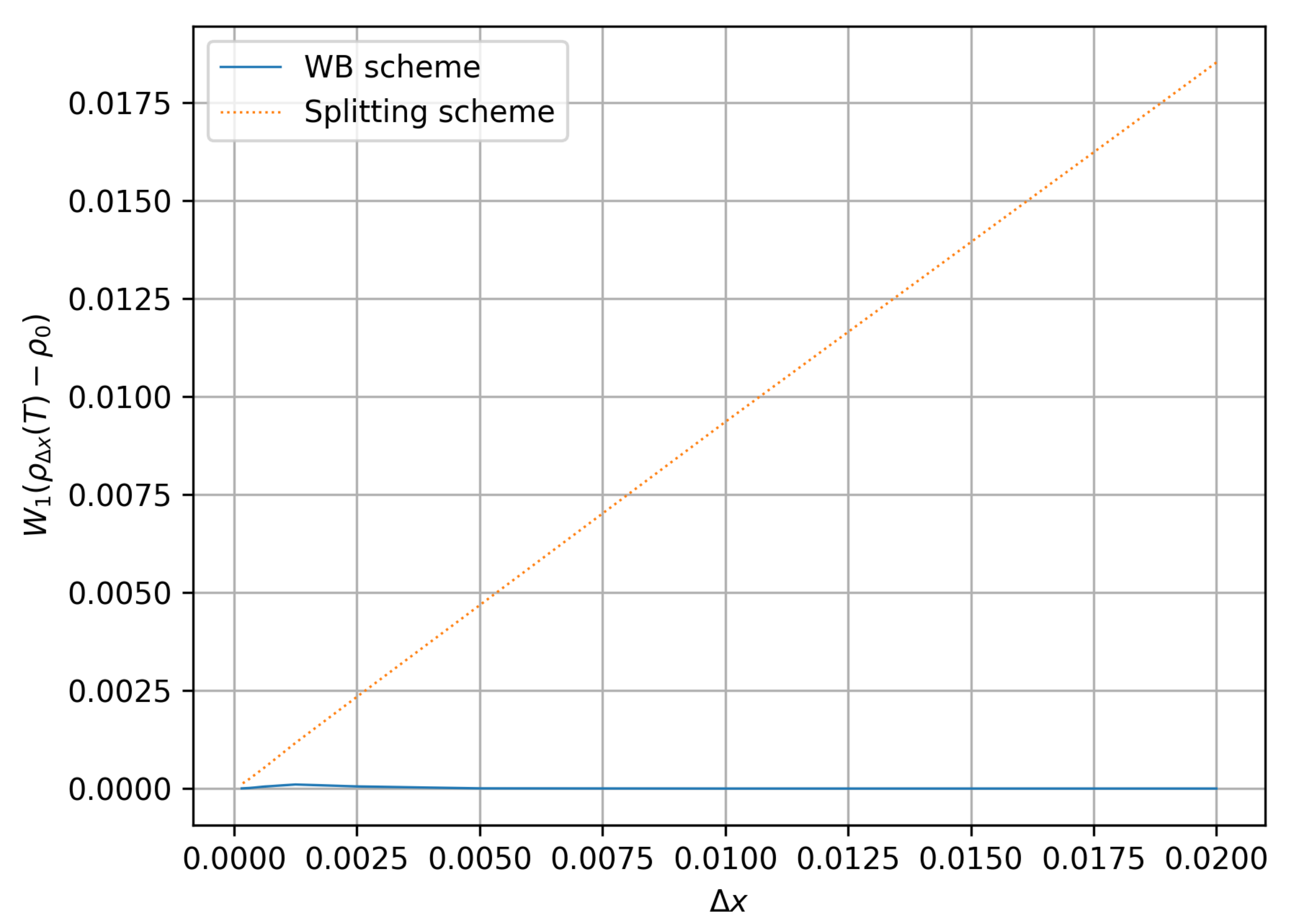
4. Numerical Experiments
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| MDPI | Multidisciplinary Digital Publishing Institute |
| DOAJ | Directory of Open Access Journals |
| AS | asymptotic preserving |
References
- Morale, D.; Capasso, V.; Oelschläger, K. An interacting particle system modelling aggregation behavior: From individuals to populations. J. Math. Biol. 2005, 50, 49–66. [Google Scholar] [CrossRef]
- Burger, M.; Di Francesco, M. Large time behavior of nonlocal aggregation models with nonlinear diffusion. Netw. Heterog. Media 2008, 3, 749–785. [Google Scholar] [CrossRef] [Green Version]
- Burger, M.; Capasso, V.; Morale, D. On an aggregation model with long and short range interactions. Nonlinear Anal. Real World Appl. 2007, 8, 939–958. [Google Scholar] [CrossRef]
- Topaz, C.M.; Bertozzi, A.L.; Lewis, M.A. A nonlocal continuum model for biological aggregation. Bull. Math. Biol. 2006, 68, 1601–1623. [Google Scholar] [CrossRef] [Green Version]
- Topaz, C.M.; Bertozzi, A.L. Swarming patterns in a two-dimensional kinematic model for biological groups. SIAM J. Appl. Math. 2004, 65, 152–174. [Google Scholar] [CrossRef]
- Dolak, Y.; Schmeiser, C. Kinetic models for chemotaxis: Hydrodynamic limits and spatio-temporal mechanisms. J. Math. Biol. 2005, 51, 595–615. [Google Scholar] [CrossRef] [PubMed]
- James, F.; Vauchelet, N. Chemotaxis: From kinetic equations to aggregate dynamics. NoDEA Nonlinear Differ. Equ. Appl. 2013, 20, 101–127. [Google Scholar] [CrossRef] [Green Version]
- Bertozzi, A.L.; Brandman, J. Finite-time blow-up of L∞-weak solutions of an aggregation equation. Commun. Math. Sci. 2010, 8, 45–65. [Google Scholar] [CrossRef] [Green Version]
- Bertozzi, A.L.; Carrillo, J.A.; Laurent, T. Blow-up in multidimensional aggregation equations with mildly singular interaction kernels. Nonlinearity 2009, 22, 683–710. [Google Scholar] [CrossRef] [Green Version]
- Carrillo, J.A.; Difrancesco, M.; Figalli, A.; Laurent, T.; Slepčev, D. Global-in-time weak measure solutions and finite-time aggregation for nonlocal interaction equations. Duke Math. J. 2011, 156, 229–271. [Google Scholar] [CrossRef] [Green Version]
- Carrillo, J.A.; James, F.; Lagoutière, F.; Vauchelet, N. The Filippov characteristic flow for the aggregation equation with mildly singular potentials. J. Differ. Equ. 2016, 260, 304–338. [Google Scholar] [CrossRef] [Green Version]
- Jin, S.; Xin, Z. The relaxation schemes for systems of conservation laws in arbitrary space dimensions. Commun. Pure Appl. Math. 1995, 48, 235–276. [Google Scholar] [CrossRef]
- James, F.; Vauchelet, N. Numerical methods for one-dimensional aggregation equations. SIAM J. Numer. Anal. 2015, 53, 895–916. [Google Scholar] [CrossRef] [Green Version]
- Bonaschi, G.A.; Carrillo, J.A.; Di Francesco, M.; Peletier, M.A. Equivalence of gradient flows and entropy solutions for singular nonlocal interaction equations in 1D. ESAIM Control Optim. Calc. Var. 2015, 21, 414–441. [Google Scholar] [CrossRef] [Green Version]
- James, F.; Vauchelet, N. Equivalence between duality and gradient flow solutions for one-dimensional aggregation equations. Discret. Contin. Dyn. Syst. 2016, 36, 1355–1382. [Google Scholar]
- Katsoulakis, M.A.; Tzavaras, A.E. Contractive relaxation systems and the scalar multidimensional conservation law. Commun. Partial. Differ. Equ. 1997, 22, 225–267. [Google Scholar] [CrossRef]
- Jin, S. Efficient asymptotic-preserving (AP) schemes for some multiscale kinetic equations. SIAM J. Sci. Comput. 1999, 21, 441–454. [Google Scholar] [CrossRef]
- Carrillo, J.A.; Chertock, A.; Huang, Y. A finite-volume method for nonlinear nonlocal equations with a gradient flow structure. Commun. Comput. Phys. 2015, 17, 233–258. [Google Scholar] [CrossRef]
- Craig, K.; Bertozzi, A.L. A blob method for the aggregation equation. Math. Comput. 2016, 85, 1681–1717. [Google Scholar] [CrossRef] [Green Version]
- Gosse, L.; Vauchelet, N. Numerical High-Field Limits in Two-Stream Kinetic Models and 1D Aggregation Equations. SIAM J. Sci. Comput. 2016, 38, A412–A434. [Google Scholar] [CrossRef] [Green Version]
- Fabrèges, B.; Hivert, H.; Le Balc’h, K.; Martel, S.; Delarue, F.; Lagoutière, F.; Vauchelet, N. Numerical schemes for the aggregation equation with pointy potentials. ESAIM Proc. Surv. 2019. [Google Scholar] [CrossRef]
- Carrillo, J.A.; Fjordholm, U.S.; Solem, S. A second-order numerical method for the aggregation equations. Math. Comput. 2021, 90, 103–139. [Google Scholar] [CrossRef]
- Gosse, L. Computing Qualitatively Correct Approximations of Balance Laws. Exponential-Fit, Well-Balanced and Asymptotic-Preserving; Springer: Milano, Italy, 2013; Volume 2, p. 340. [Google Scholar]
- Villani, C. Topics in Optimal Transportation; American Mathematical Society (AMS): Providence, RI, USA, 2003; Volume 58, p. 370. [Google Scholar]
- Santambrogio, F. Optimal Transport for Applied Mathematicians. Calculus of Variations, PDEs, and Modeling; Birkhäuser/Springer: Cham, Switzerland, 2015; Volume 87, p. 353. [Google Scholar]
- Vallender, S.S. Calculation of the Wasserstein Distance Between Probability Distributions on the Line. Theory Probab. Appl. 1974, 18, 784–786. [Google Scholar] [CrossRef]
- Rachev, S.T.; Rüschendorf, L. Mass Transportation Problems. Vol. 1: Theory. Vol. 2: Applications; Springer: New York, NY, USA, 1998; p. 430. [Google Scholar]
- Natalini, R. Convergence to equilibrium for the relaxation approximations of conservation laws. Commun. Pure Appl. Math. 1996, 49, 795–823. [Google Scholar] [CrossRef]
- Serre, D. Systems of Conservation Laws 1: Hyperbolicity, Entropies, Shock Waves; Cambridge University Press: New York, NY, USA, 1999. [Google Scholar]
- Bouchut, F.; Perthame, B. Kružkov’s Estimates for Scalar Conservation Laws Revisited. Trans. Am. Math. Soc. 1998, 350, 2847–2870. [Google Scholar] [CrossRef] [Green Version]
- Liu, H.; Warnecke, G. Convergence Rates for Relaxation Schemes Approximating Conservation Laws. SIAM J. Numer. Anal. 2000, 37, 1316–1337. [Google Scholar] [CrossRef] [Green Version]
- Delarue, F.; Lagoutière, F.; Vauchelet, N. Convergence analysis of upwind type schemes for the aggregation equation with pointy potential. Ann. Henri Lebesgue 2020, 3, 217–260. [Google Scholar] [CrossRef] [Green Version]
- Després, B. Discrete Compressive Solutions of Scalar Conservation Laws. J. Hyper. Differ. Equ. 2004, 01, 493–520. [Google Scholar] [CrossRef]




Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fabrèges, B.; Lagoutière, F.; Tran Tien, S.; Vauchelet, N. Relaxation Limit of the Aggregation Equation with Pointy Potential. Axioms 2021, 10, 108. https://doi.org/10.3390/axioms10020108
Fabrèges B, Lagoutière F, Tran Tien S, Vauchelet N. Relaxation Limit of the Aggregation Equation with Pointy Potential. Axioms. 2021; 10(2):108. https://doi.org/10.3390/axioms10020108
Chicago/Turabian StyleFabrèges, Benoît, Frédéric Lagoutière, Sébastien Tran Tien, and Nicolas Vauchelet. 2021. "Relaxation Limit of the Aggregation Equation with Pointy Potential" Axioms 10, no. 2: 108. https://doi.org/10.3390/axioms10020108