
Nonlinear Control System Design of an Underactuated Robot Based on Operator Theory and Isomorphism Scheme



Abstract
:1. Introduction
2. Notation
3. Preliminaries
3.1. Modeling of Swing-Up
3.2. Operator Theory
- (i)
- Right factorization: Let the input space be denoted by U and output space by Y. In general, these spaces are different extended linear spaces. Let the plant operator be such that where and . In addition, let W be an auxiliary linear space and let the operator be stable such that , , and let be stable and invertible such that . It follows that the plant P has a right factorization determined by N and
- (ii)
- Right coprime factorization: Suppose there is a right factorization operator N, D in plant P. The Bezout equation is obtained as
- (iii)
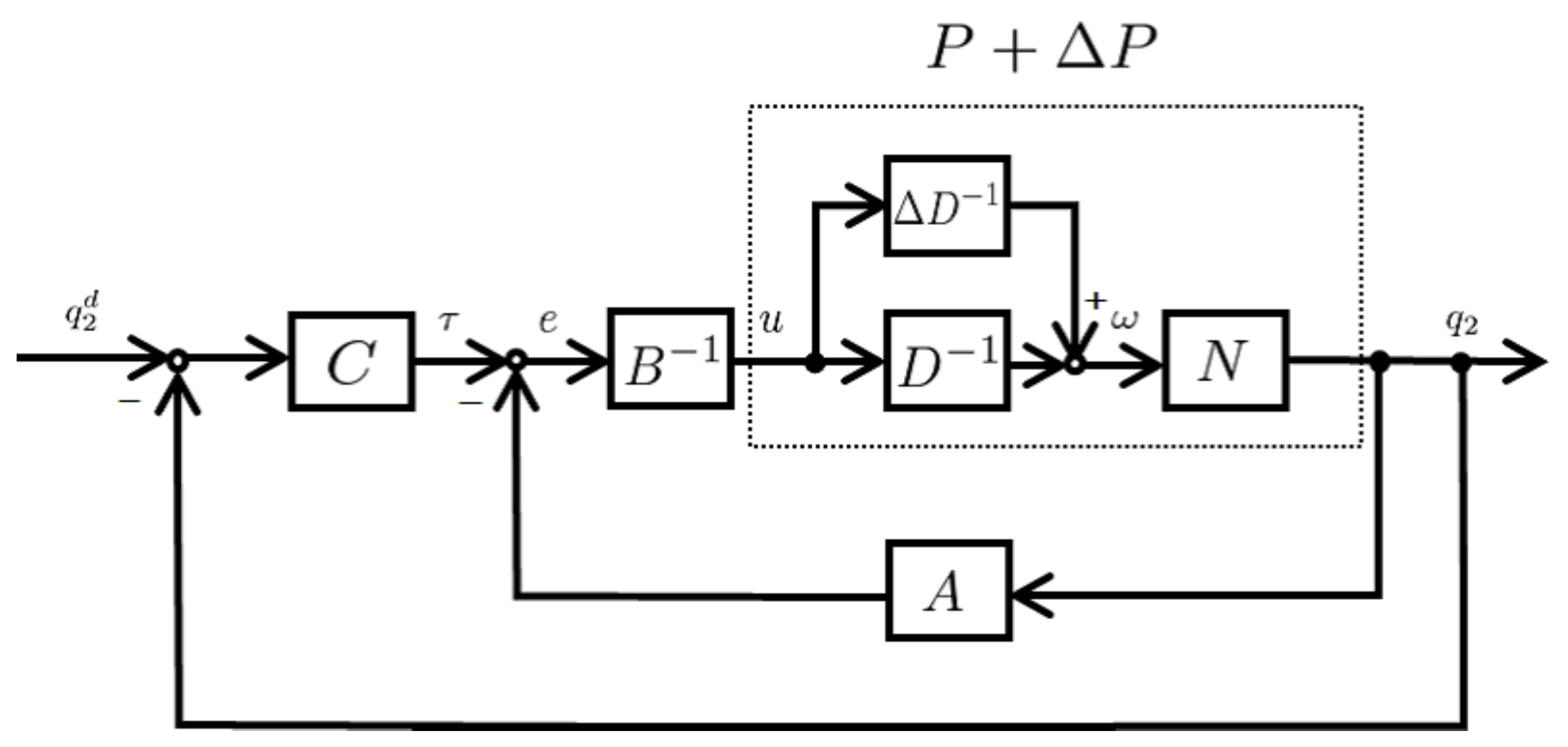
- Robust right coprime factorization: In general, there are uncertainties that are difficult to express in a mathematical model in an actual nonlinear control system. Thus, the nonlinear control system with uncertainties may be unstable. Using robust right coprime factorization to factorize a plant can guarantee the robust stability of a nonlinear feedback system with uncertainties. The nonlinear feedback system with uncertainties is shown in Figure 3. Plant P without uncertainties is the nominal plant, and the actual plant with uncertainties iswhere is unimodular. The nonlinear feedback system with uncertainties can be robust stable if (8) is satisfied.
4. Nonlinear Control System Design
4.1. Tracking Controller Design of Swing-Up
4.1.1. Determining Target Angle
4.1.2. Tracking Controller Design
4.2. Control System Design Based on Operator Theory and Isomorphism Scheme
4.2.1. Right Factorization of the Swing-Up
4.2.2. Right Coprime Factorization of Underactuated Robot
4.2.3. Robust Stability Condition
4.2.4. Control System Design Based on Operator Theory and Isomorphism Scheme
5. Simulation
5.1. Control System Simulation Based on Operator Theory
5.2. Control System Simulation Based on Operator Theory and Isomorphism Scheme
5.3. Robust Stability of a Control System
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- He, B.; Wang, S.; Liu, Y. Underactuated robotics: A review. Int. J. Adv. Robot. Syst. 2019, 16, 1–29. [Google Scholar] [CrossRef] [Green Version]
- Henmi, T.; Wada, T.; Deng, M.; Inoue, A.; Ueki, N.; Hirashima, Y. Swing-up control of an Acrobot having a limited range of joint angle of two links. In Proceedings of the 5th Asian Control Conference (IEEE Cat. No. 04EX904), Melbourne, VIC, Australia, 20–23 July 2004. [Google Scholar]
- Henmi, T.; Deng, M.; Inoue, A. Swing-up controller for the acrobot using skill of human movements. Int. J. Model. Identif. Control 2009, 6, 222–229. [Google Scholar] [CrossRef]
- Xin, X.; Yamasaki, T. Energy-based swing-up control for a remotely driven Acrobot: Theoretical and experimental results. IEEE Trans. Control Syst. Technol. 2011, 20, 1048–1056. [Google Scholar] [CrossRef]
- Xin, X.; Kaneda, M. The swing up control for the Acrobot based on energy control approach. In Proceedings of the 41st IEEE Conference on Decision and Control, Las Vegas, NV, USA, 10–13 December 2002. [Google Scholar]
- Xin, X.; Kaneda, M. New analytical results of the energy based swinging up control of the Acrobot. In Proceedings of the 43rd IEEE Conference on Decision and Control (CDC), Nassau, Bahamas, 4–17 December 12004. [Google Scholar]
- Spong, M.W. The swing up control problem for the acrobot. IEEE Control Syst. Mag. 1995, 15, 49–55. [Google Scholar]
- Xin, X.; Kaneda, M. A robust control approach to the swing up control problem for the Acrobot. In Proceedings of the 2001 IEEE/RSJ International Conference on Intelligent Robots and Systems. Expanding the Societal Role of Robotics in the the Next Millennium, Maui, HI, USA, 29 October–3 November 2001. [Google Scholar]
- Deng, M.; Inoue, A.; Kosugi, M.; Henmi, T. Swing-up control of a cart-type single inverted pendulum with parasitic dynamics. Int. J. Innov. Comput. Inform. Control 2007, 3, 1501–1510. [Google Scholar]
- Ordaz, P.; Poznyak, A. Adaptive-robust stabilization of the Furuta’s pendulum via attractive ellipsoid method. J. Dyn. Syst. Meas. Control 2016, 138, 021005. [Google Scholar] [CrossRef]
- Ordaz, P.; Poznyak, A. The Furuta’s pendulum stabilization without the use of a mathematical model: Attractive Ellipsoid Method with KL-adaptation. In Proceedings of the 2012 IEEE 51st IEEE Conference on Decision and Control (CDC), Maui, HI, USA, 10–13 December 2012. [Google Scholar]
- Ordaz-Oliver, J.P.; Santos-Sánchez, O.J.; López-Morales, V. Toward a generalized sub-optimal control method of underactuated systems. Optim. Control. Appl. Methods 2012, 33, 338–351. [Google Scholar] [CrossRef]
- Qiao, H. Uniqueness for measure-valued equations of nonlinear filtering for stochastic dynamical systems with Lévy noise. Adv. Appl. Probab. 2018, 50, 396–413. [Google Scholar] [CrossRef]
- Deng, M. Operator-Based Nonlinear Control Systems: Design and Applications; Wiley-IEEE Press: Hoboken, NJ, USA, 2014. [Google Scholar]
- Deng, M.; Bu, N. Robust control for nonlinear systems using passivity-based robust right coprime factorization. IEEE Trans. Autom. Control 2012, 57, 2599–2604. [Google Scholar] [CrossRef]
- Umemoto, K.; Matsuno, F.; Deng, M. Control system design for nonlinear plants based on generalized HS Black formula using robust right coprime factorization. In Proceedings of the 2012 International Conference on Advanced Mechatronic Systems, Tokyo, Japan, 18–21 September 2012. [Google Scholar]
- Chen, G.; Han, Z. Robust right coprime factorization and robust stabilization of nonlinear feedback control systems. IEEE Trans. Autom. Control 1998, 43, 1505–1509. [Google Scholar] [CrossRef]
- Bu, N.; Chen, W.; Jin, L.; Zhao, Y. Robust control for uncertain nonlinear feedback system using operator-based right coprime factorization. IEEE/CAA J. Autom. Sin. 2018, 6, 824–829. [Google Scholar] [CrossRef]
- Jin, G.; Deng, M. Operator-based robust nonlinear free vibration control of a flexible plate with unknown input nonlinearity. IEEE/CAA J. Autom. Sin. 2020, 7, 442–450. [Google Scholar] [CrossRef]
- Bi, S.; Wang, L.; Wen, S.; Deng, M. Operator-based robust nonlinear control for SISO and MIMO nonlinear systems with PI hysteresis. IEEE/CAA J. Autom. Sin. 2016, 5, 523–530. [Google Scholar] [CrossRef]
- Bu, N.; Deng, M. System design for nonlinear plants using operator-based robust right coprime factorization and isomorphism. IEEE Trans. Autom. Control 2011, 56, 952–957. [Google Scholar] [CrossRef]
- Deng, M.; Bu, N. Isomorphism-based robust right coprime factorisation of non-linear unstable plants with perturbations. IET Control Theory Appl. 2010, 4, 2381–2390. [Google Scholar] [CrossRef]
- Gao, S.; Zhou, M.; Wang, Y.; Cheng, J.; Yachi, H.; Wang, J. Dendritic neuron model with effective learning algorithms for classification, approximation, and prediction. IEEE Trans. Neural Netw. Learn. Syst. 2018, 30, 601–614. [Google Scholar] [CrossRef] [PubMed]
- Wang, J.; Kumbasar, T. Parameter optimization of interval Type-2 fuzzy neural networks based on PSO and BBBC methods. IEEE Trans. Neural Netw. Learn. Syst. 2019, 6, 247–257. [Google Scholar] [CrossRef]
- Fujita, K.; Deng, M.; Wakimoto, S. A miniature bending rubber controlled by using the PSO-SVR-based motion estimation method with the generalized Gaussian kernel. Actuators 2017, 6, 6. [Google Scholar] [CrossRef]
- Deng, M.; Kawashima, T. Adaptive nonlinear sensorless control for an uncertain miniature pneumatic curling rubber actuator using passivity and robust right coprime factorization. IEEE Trans. Control Syst. Technol. 2015, 24, 318–324. [Google Scholar] [CrossRef]
- Ueno, K.; Kawamura, S.; Deng, M. Operator-Based Nonlinear Control for a Miniature Flexible Actuator Using the Funnel Control Method. Machines 2021, 9, 26. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| the set of stable operators from U to Y | |
| the set of unimodular operators | |
| norm | |
| Lipschitz semi-norm | |
| an operator mapping from to | |
| the domain and range of A | |
| the range of A | |
| the family of all nonlinear operators mapping | |
| from into | |
| normed linear space over the field of complex | |
| numbers endowed with norms | |
| a Lipschitz operator mapping from to | |
| P | plant |
| uncertainties | |
| the actual plant with uncertainties | |
| operators of the system | |
| unimodular operators |
| L | Lagrangian | [J] |
| K | Kinetic energy of acrobot | [J] |
| V | Potential energy of acrobot | [J] |
| Target angle | [] | |
| Torque | [N·m] | |
| Angle of Link1 | [rad] | |
| Angle of Link2 | [rad] | |
| Mass of Link1 | 0.175 kg | |
| Mass of Link2 | 0.285 kg | |
| Length of Link1 | 0.3 m | |
| Length of Link2 | 0.5 m | |
| Lengh from First joint to the | ||
| center of gravity of Link1 | 0.177 m | |
| Lengh from Second joint to the | ||
| center of gravity of Link2 | 0.25 m | |
| Moment of inertia of Link1 | 0.0013 kg | |
| Moment of inertia of Link2 | 0.0059 kg | |
| g | Acceleration of gravity | [m/] |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Deng, M.; Kubota, S. Nonlinear Control System Design of an Underactuated Robot Based on Operator Theory and Isomorphism Scheme. Axioms 2021, 10, 62. https://doi.org/10.3390/axioms10020062
Deng M, Kubota S. Nonlinear Control System Design of an Underactuated Robot Based on Operator Theory and Isomorphism Scheme. Axioms. 2021; 10(2):62. https://doi.org/10.3390/axioms10020062
Chicago/Turabian StyleDeng, Mingcong, and Shotaro Kubota. 2021. "Nonlinear Control System Design of an Underactuated Robot Based on Operator Theory and Isomorphism Scheme" Axioms 10, no. 2: 62. https://doi.org/10.3390/axioms10020062
APA StyleDeng, M., & Kubota, S. (2021). Nonlinear Control System Design of an Underactuated Robot Based on Operator Theory and Isomorphism Scheme. Axioms, 10(2), 62. https://doi.org/10.3390/axioms10020062