
A Novel Numerical Method for Solving Fractional Diffusion-Wave and Nonlinear Fredholm and Volterra Integral Equations with Zero Absolute Error




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Fractional Diffusion-Wave Equation
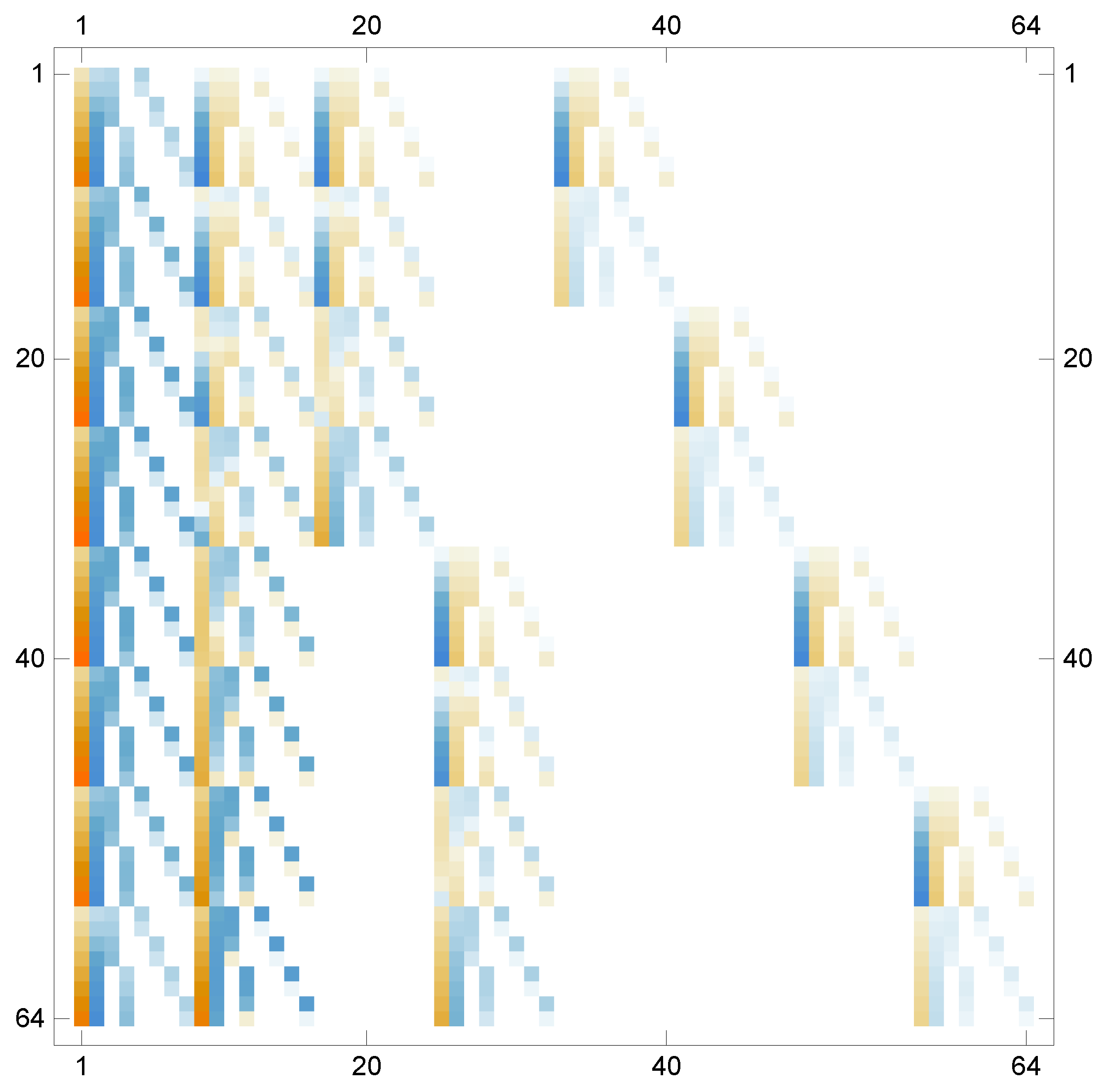
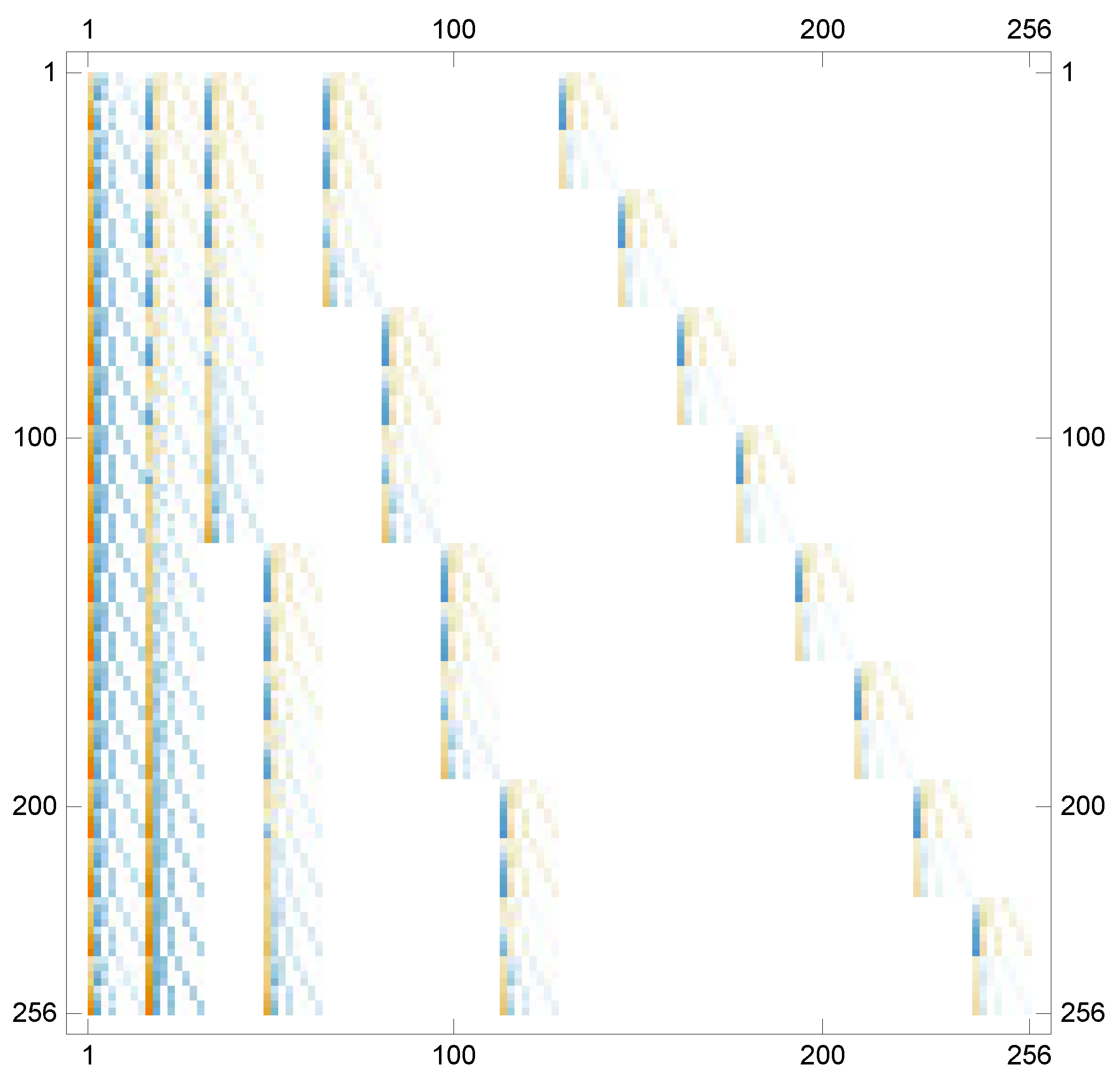
3. The New Numerical Scheme
- When , we have
- When , we have
- When , we have
- When , we have
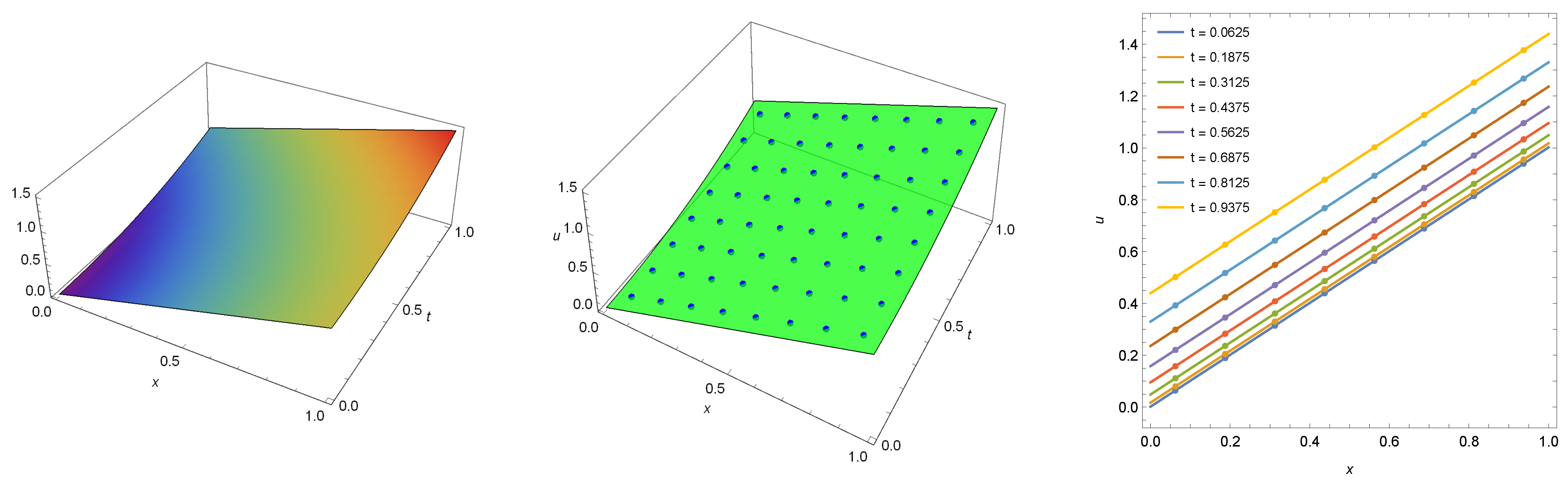
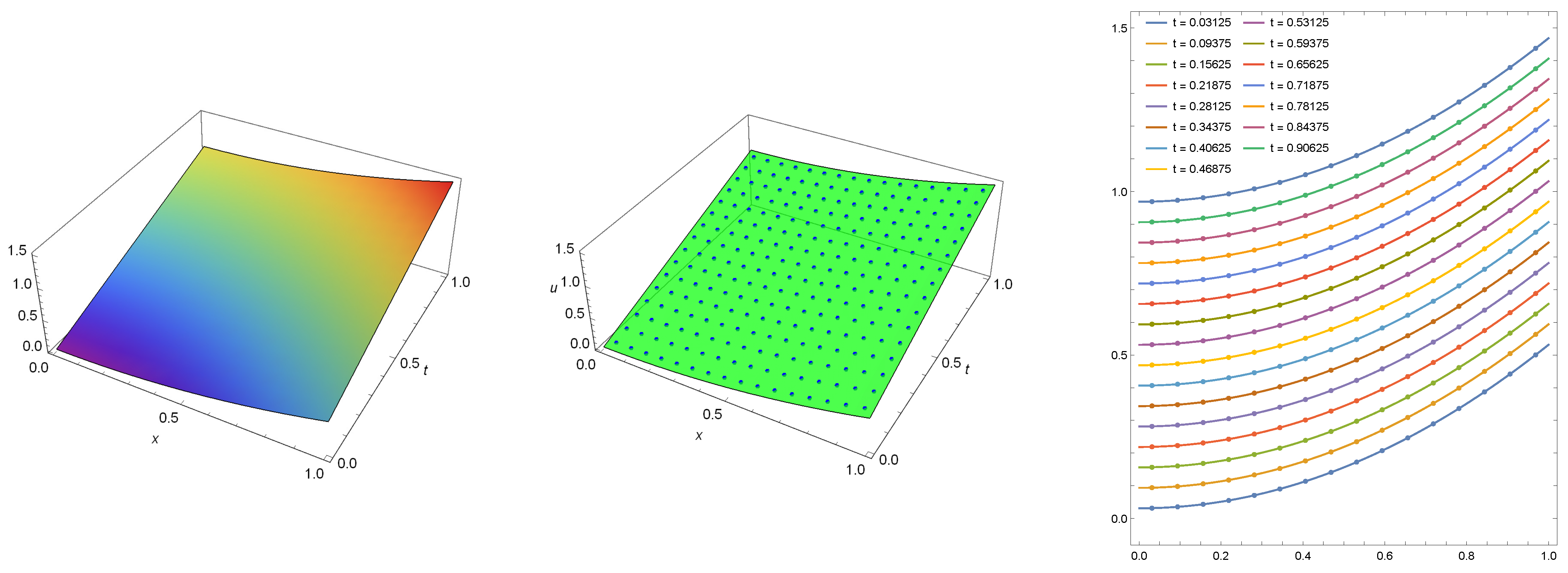
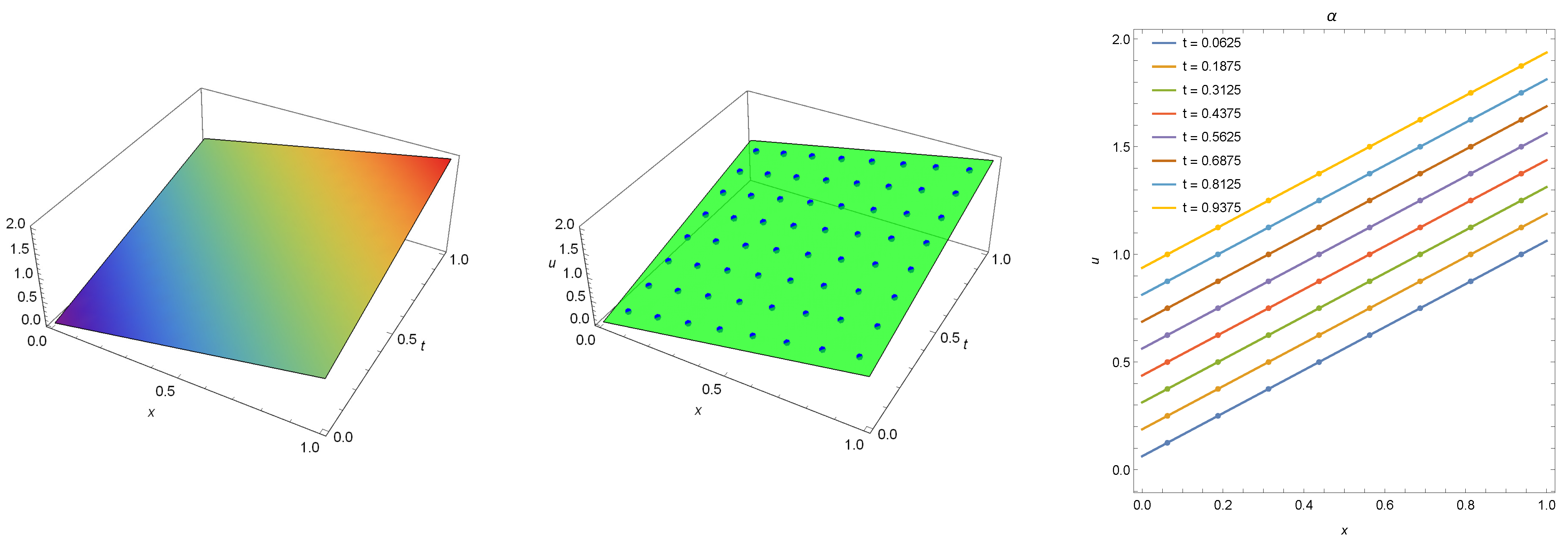
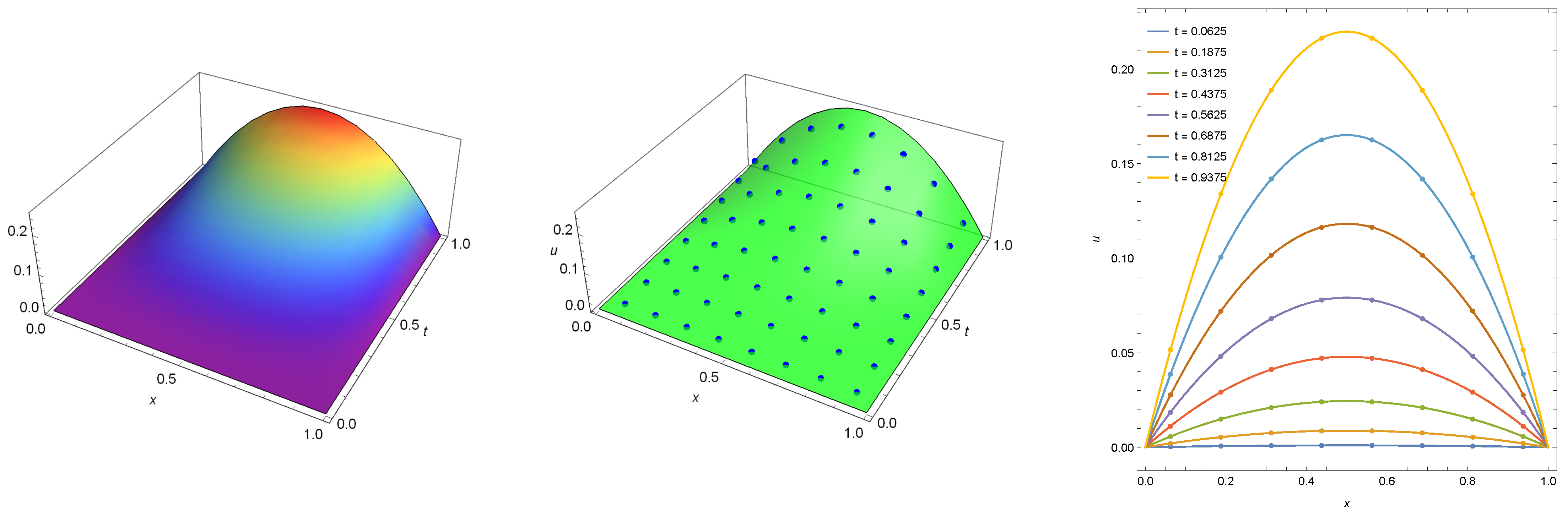
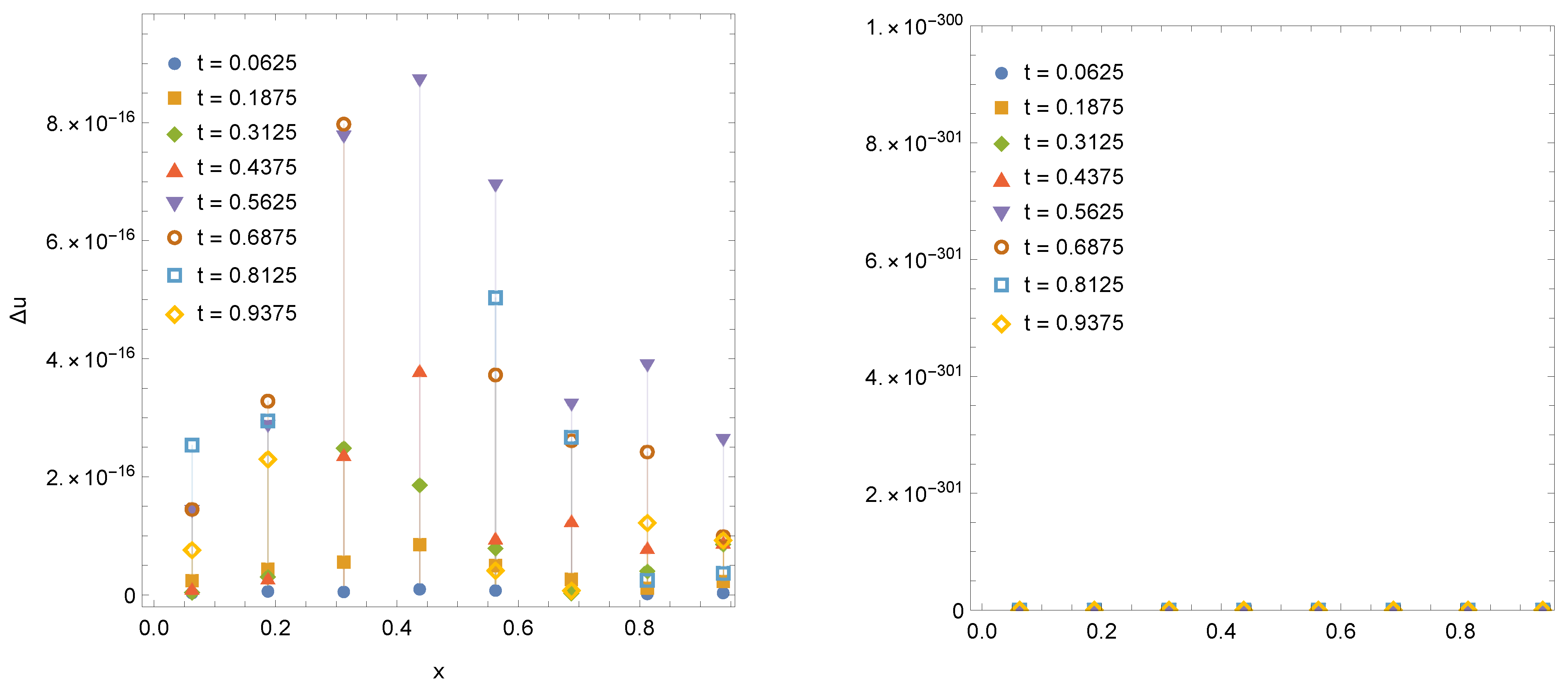
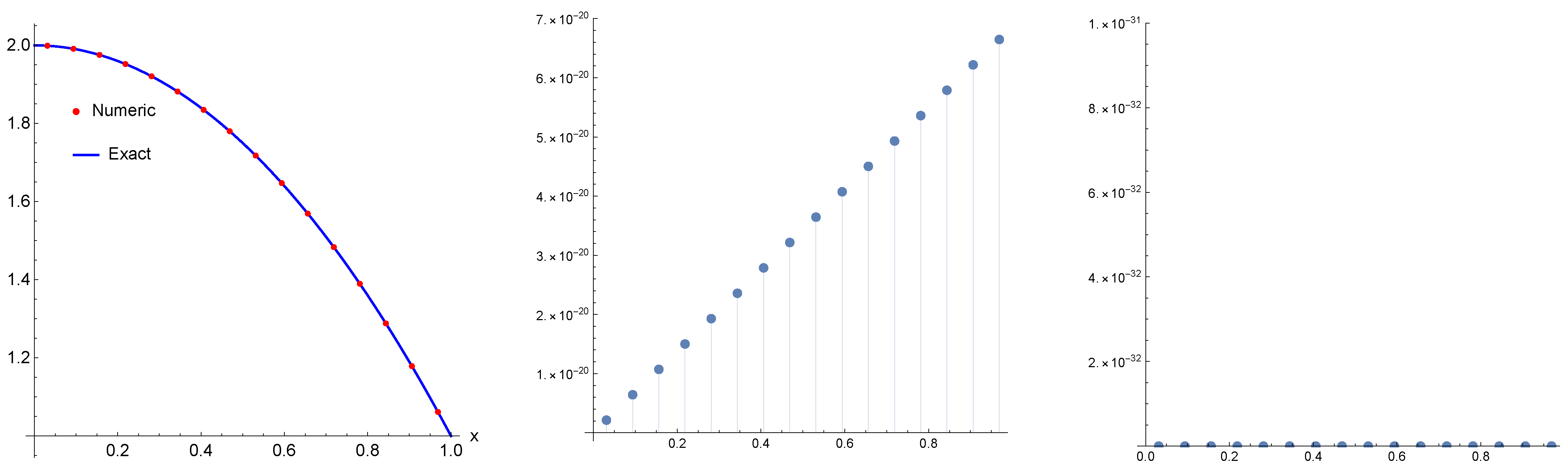
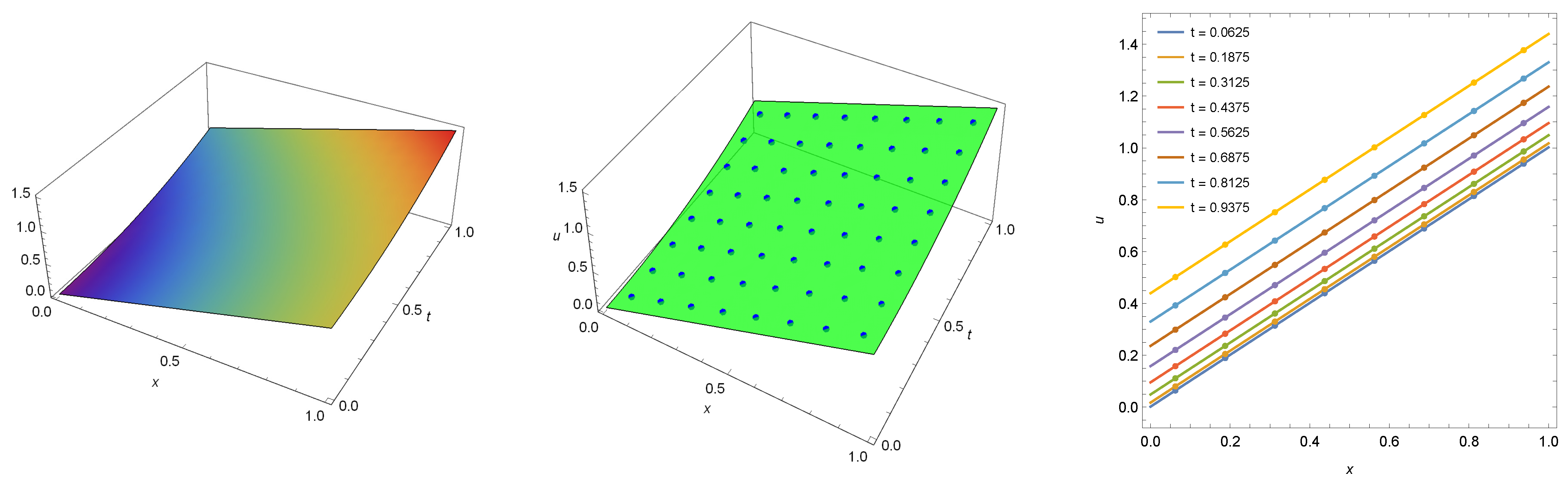
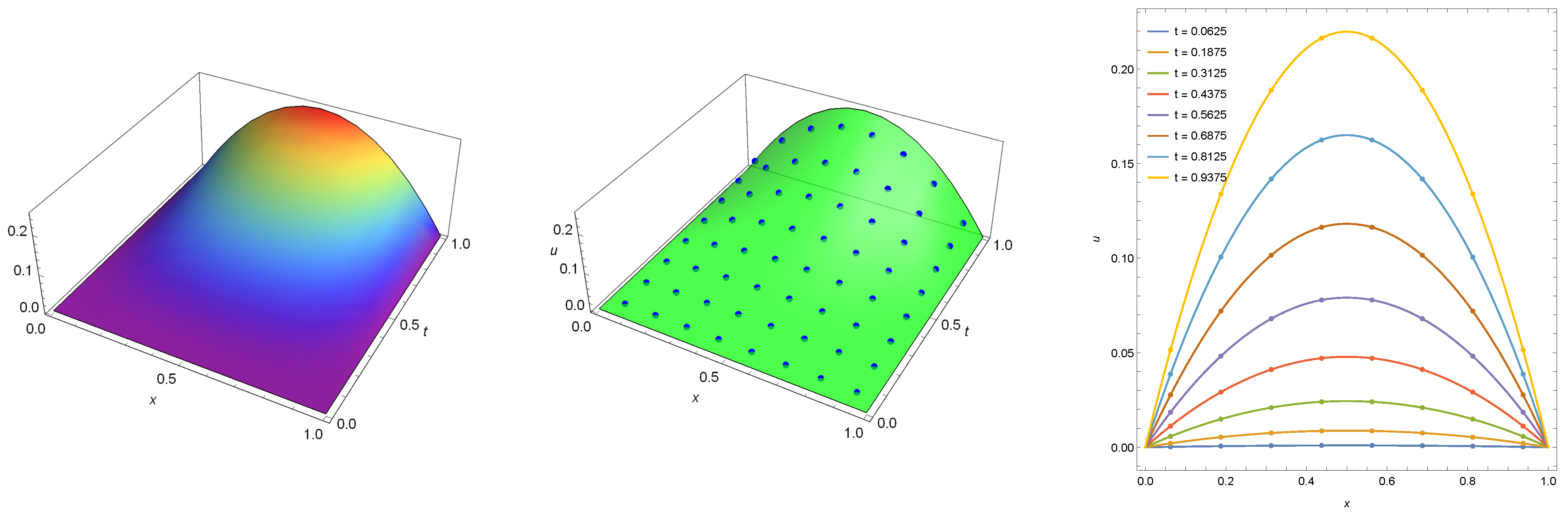
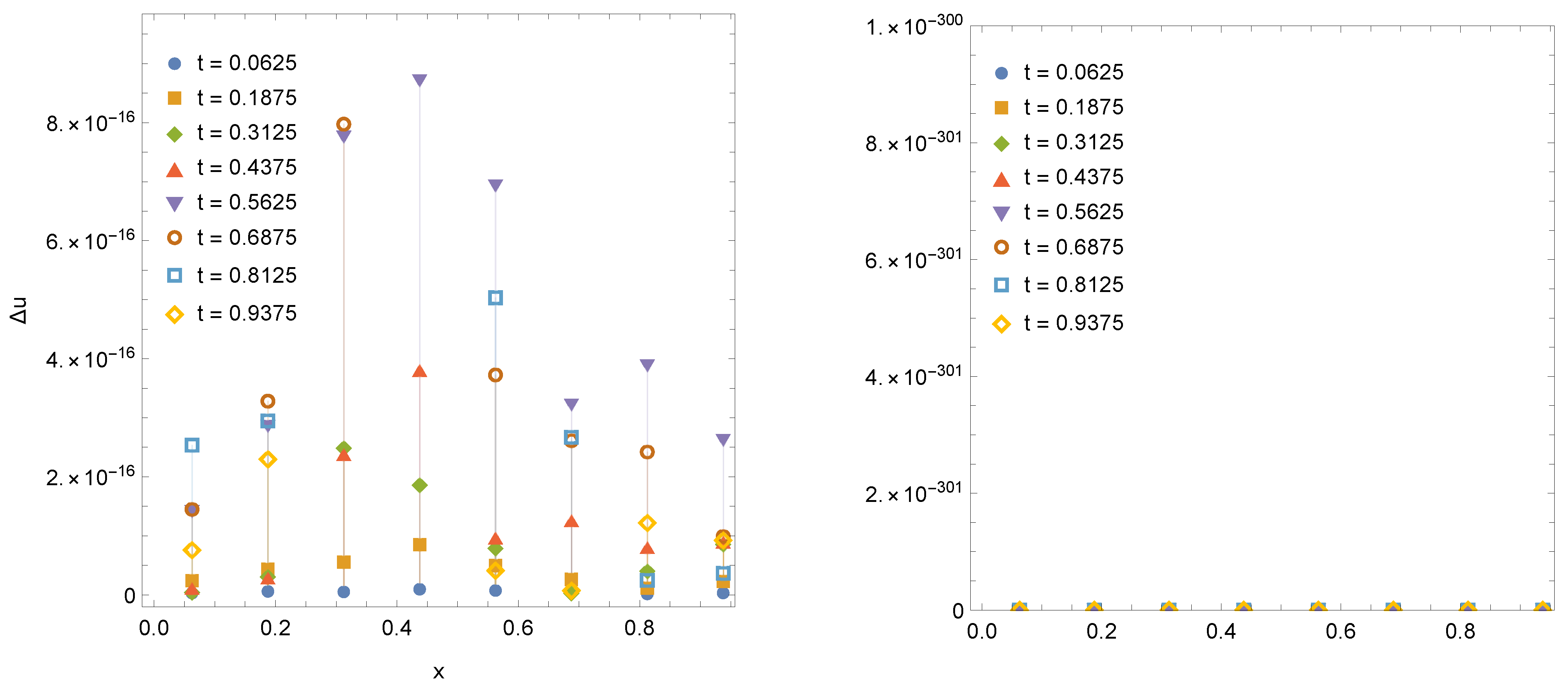
4. Numerical Performance
5. Numerical Technique for Nonlinear Fredholm and Volterra Integral Equation
- (1)
- is continues and bounded on ;
- (2)
- The kernel is bounded and uniformly continuous in both x and t, for all finite u where ;
- (3)
- The kernel satisfies the uniform Lipschitz conditionfor all finite and .
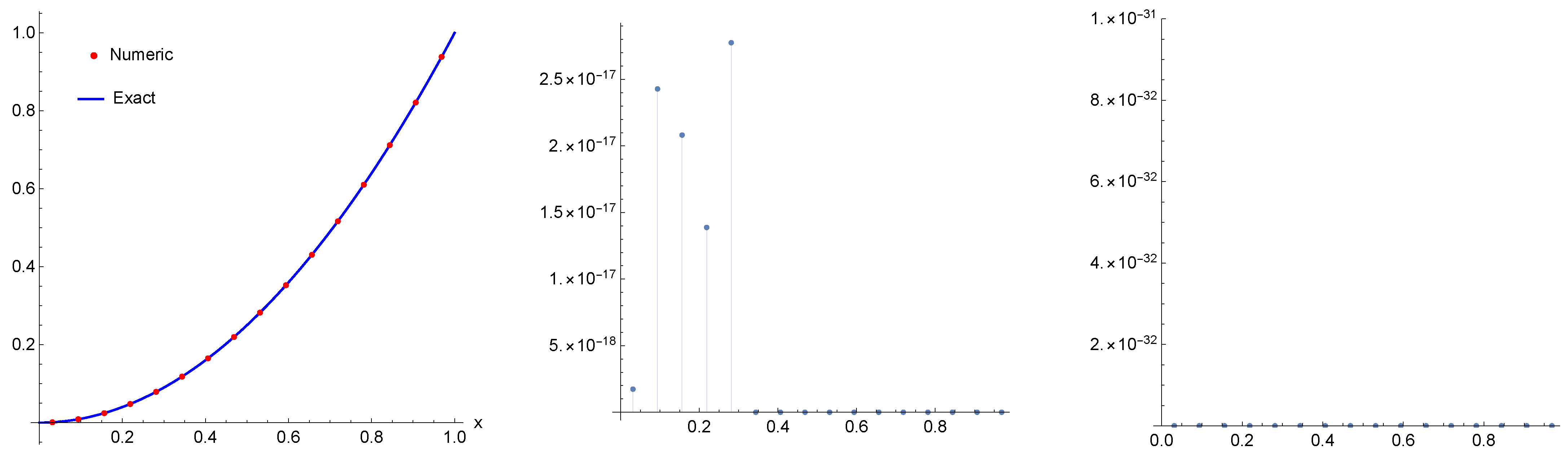
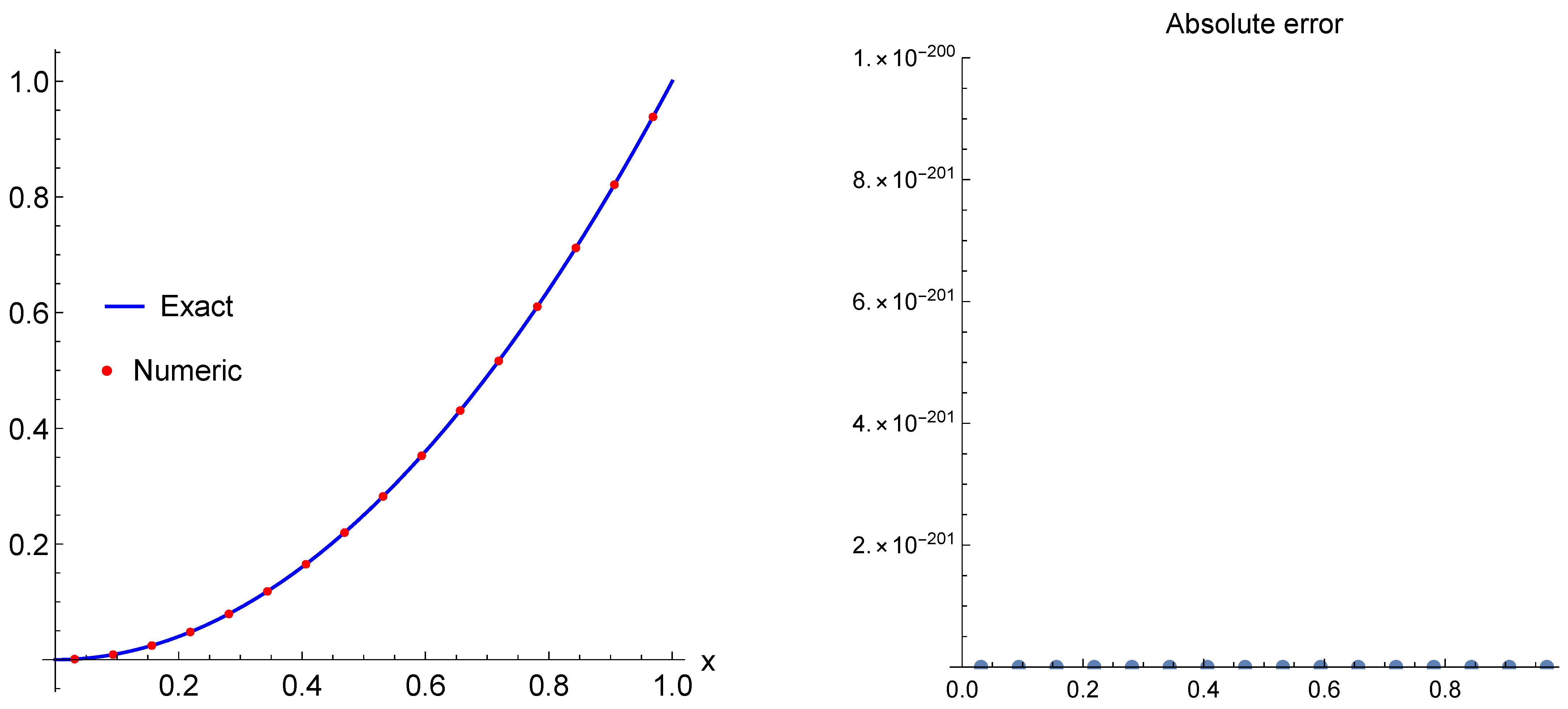
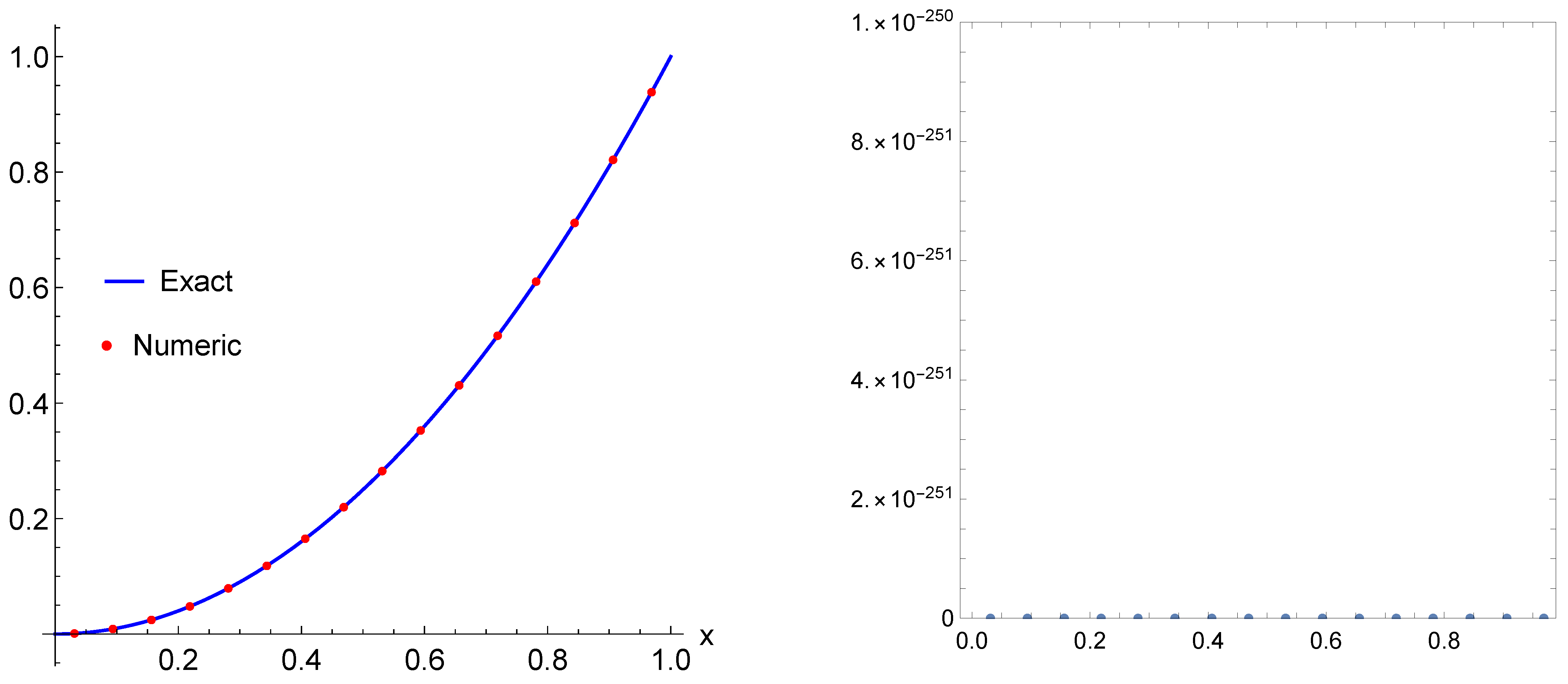
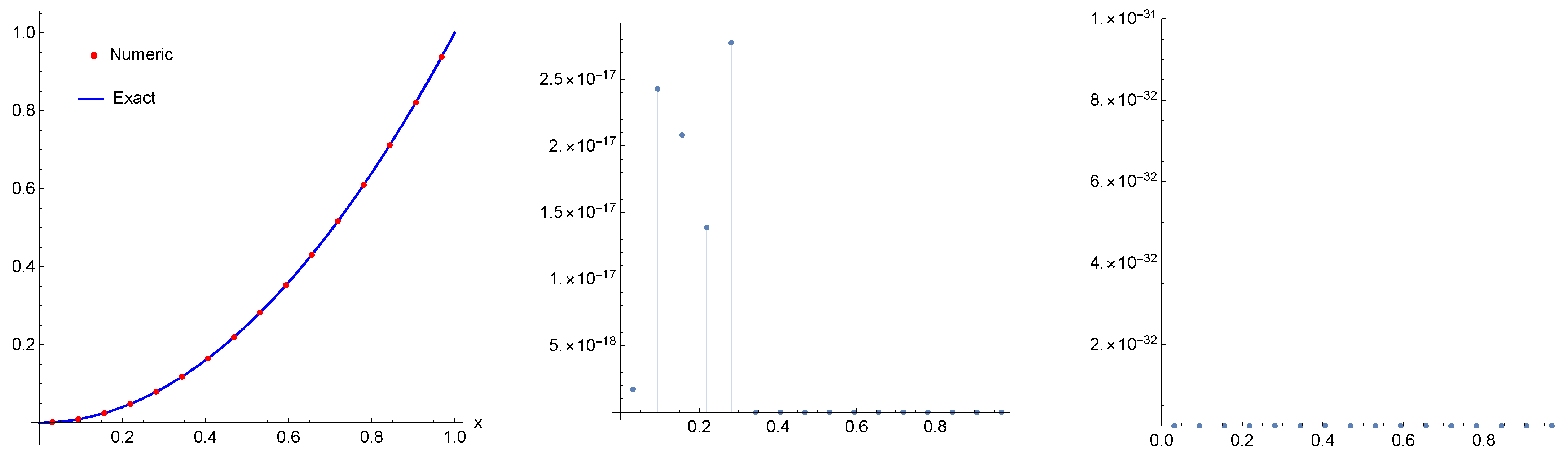
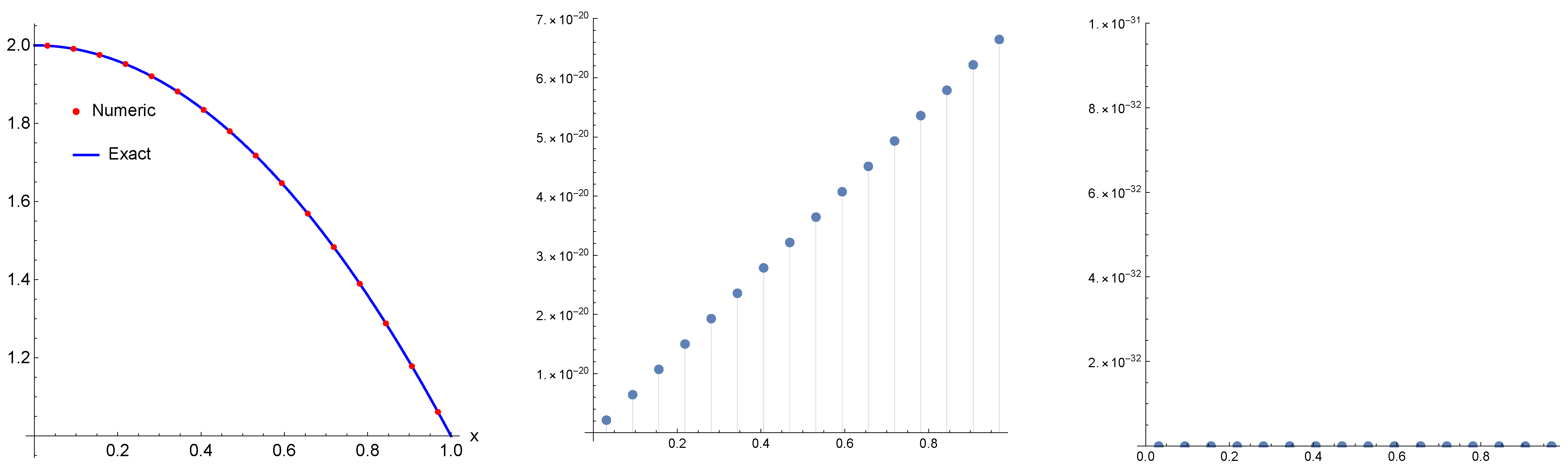
6. Numerical Examples
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Ghanbari, B.; Atangana, A. A new application of fractional Atangana–Baleanu derivatives: Designing ABC-fractional masks in image processing. Phys. A Stat. Mech. Appl. 2020, 542, 123516. [Google Scholar] [CrossRef]
- Mohammad, M.; Trounev, A.; Cattani, C. An efficient method based on framelets for solving fractional Volterra integral equations. Entropy 2020, 22, 824. [Google Scholar] [CrossRef] [PubMed]
- Mohammad, M.; Trounev, A. On the dynamical modeling of COVID-19 involving Atangana-Baleanu fractional derivative and based on Daubechies framelet simulations. Chaos Solitons Fractals 2020, 140, 110171. [Google Scholar] [CrossRef] [PubMed]
- Mohammad, M.; Trounev, A. Fractional nonlinear Volterra–Fredholm integral equations involving Atangana–Baleanu fractional derivative: Framelet applications. Adv. Differ. Equ. 2020, 618, 1–15. [Google Scholar] [CrossRef]
- Mohammad, M.; Trounev, A.; Cattani, C. The dynamics of COVID-19 in the UAE based on fractional derivative modeling using Riesz wavelets simulation. Adv. Differ. Equ. 2021, 2021, 1–14. [Google Scholar] [CrossRef] [PubMed]
- Alshbool, H.M.; Isik, O.; Hashim, I. Fractional Bernstein series solution of fractional diffusion equations with error estimate. Axioms 2021, 10, 6. [Google Scholar] [CrossRef]
- Mohammad, M. Biorthogonal-Wavelet-Based Method for Numerical Solution of Volterra Integral Equations. Entropy 2019, 21, 1098. [Google Scholar] [CrossRef] [Green Version]
- Ferrari, A.; Gadella, M.; Lara, L.P.; Santillan, E. Approximate solutions of one dimensional systems with fractional calculus. Int. J. Mod. Phys. C 2020, 31, 2050092. [Google Scholar] [CrossRef]
- Fernando, O.R.; Oscar, R.O. Transition from the Wave Equation to Either the Heat or the Transport Equations through Fractional Differential Expressions. Symmetry 2018, 10, 524. [Google Scholar] [CrossRef] [Green Version]
- Rajagopal, N.; Balaji, S.; Seethalakshmi, R.; Balaji, V.S. A new numerical method for fractional order volterra integro-differential equations. Ain Shams Eng. J. 2020, 11, 171–177. [Google Scholar] [CrossRef]
- Zhou, F.; Xu, X. Numerical solution of time-fractional diffusion-wave equations via chebyshev wavelets collocation method. Adv. Math. Phys. 2017, 2017, 1–17. [Google Scholar] [CrossRef] [Green Version]
- Mohammad, M.; Lin, E.B. Gibbs phenomenon in tight framelet expansions. Commun. Nonlinear Sci. Numer. Simul. 2018, 55, 84–92. [Google Scholar] [CrossRef]
- Heydari, M.H.; Hooshmandasl, M.R.; Maalek Ghaini, F.M.; Cattani, C. Wavelets method for the time fractional diffusion-wave equation. Phys. Lett. A 2015, 379, 71–76. [Google Scholar]
- Chen, J.; Liu, F.; Anh, V.; Shen, S.; Liu, Q.; Liao, C. The analytical solution and numerical solution of the fractional diffusion-wave equation with damping. Appl. Math. Comput. 2012, 219, 1737–1748. [Google Scholar] [CrossRef] [Green Version]
- Tricomi, F.G. Integral equations. In Pure and Applied Mathematics; Dover Publications: New York, NY, USA, 1957; Volume 5, p. 238. [Google Scholar]
- Heydari, M.; Shivanian, E.; Azarnavid, B.; Abbasbandy, S. An iterative multistep kernel based method for nonlinear volterra integral and integro-differential equations of fractional order. J. Comput. Appl. Math. 2019, 361, 97–112. [Google Scholar] [CrossRef]
- Babolian, E.; Javadi, S.; Moradi, E. Error analysis of re- producing kernel hilbert space method for solving functional integral equations. J. Comput. Appl. Math. 2016, 300, 300–311. [Google Scholar] [CrossRef]
- Ketabchi, R.; Mokhtari, R.; Babolian, E. Some error estimates for solving volterra integral equations by using the reproducing kernel method. J. Comput. Appl. Math. 2015, 273, 245–250. [Google Scholar] [CrossRef]
- Aziz, I. New algorithms for the numerical solution of nonlinear fredholm and volterra integral equations using haar wavelets. J. Comput. Appl. Math. 2013, 239, 333–345. [Google Scholar] [CrossRef]
- Lepik, Ü.; Tamme, E. Solution of nonlinear fredholm integral equations via the haar wavelet method. Proc. Est. Acad. Sci. Phys. Math. 2007, 56, 17–27. [Google Scholar]


Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mohammad, M.; Trounev, A.; Alshbool, M. A Novel Numerical Method for Solving Fractional Diffusion-Wave and Nonlinear Fredholm and Volterra Integral Equations with Zero Absolute Error. Axioms 2021, 10, 165. https://doi.org/10.3390/axioms10030165
Mohammad M, Trounev A, Alshbool M. A Novel Numerical Method for Solving Fractional Diffusion-Wave and Nonlinear Fredholm and Volterra Integral Equations with Zero Absolute Error. Axioms. 2021; 10(3):165. https://doi.org/10.3390/axioms10030165
Chicago/Turabian StyleMohammad, Mutaz, Alexandre Trounev, and Mohammed Alshbool. 2021. "A Novel Numerical Method for Solving Fractional Diffusion-Wave and Nonlinear Fredholm and Volterra Integral Equations with Zero Absolute Error" Axioms 10, no. 3: 165. https://doi.org/10.3390/axioms10030165
APA StyleMohammad, M., Trounev, A., & Alshbool, M. (2021). A Novel Numerical Method for Solving Fractional Diffusion-Wave and Nonlinear Fredholm and Volterra Integral Equations with Zero Absolute Error. Axioms, 10(3), 165. https://doi.org/10.3390/axioms10030165