
Hybrid Projective Synchronization of Fractional-Order Extended Hindmarsh–Rose Neurons with Hidden Attractors


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Fractional Stability Theory and Relative Preliminaries
3. System Description and the Hidden Attractors
4. Hybrid Projective Synchronization of Fractional-Order Extended HR Neurons
4.1. Hybrid Projective Synchronization Schemes
4.2. Numerical Simulation Verification
5. Conclusions
- (1)
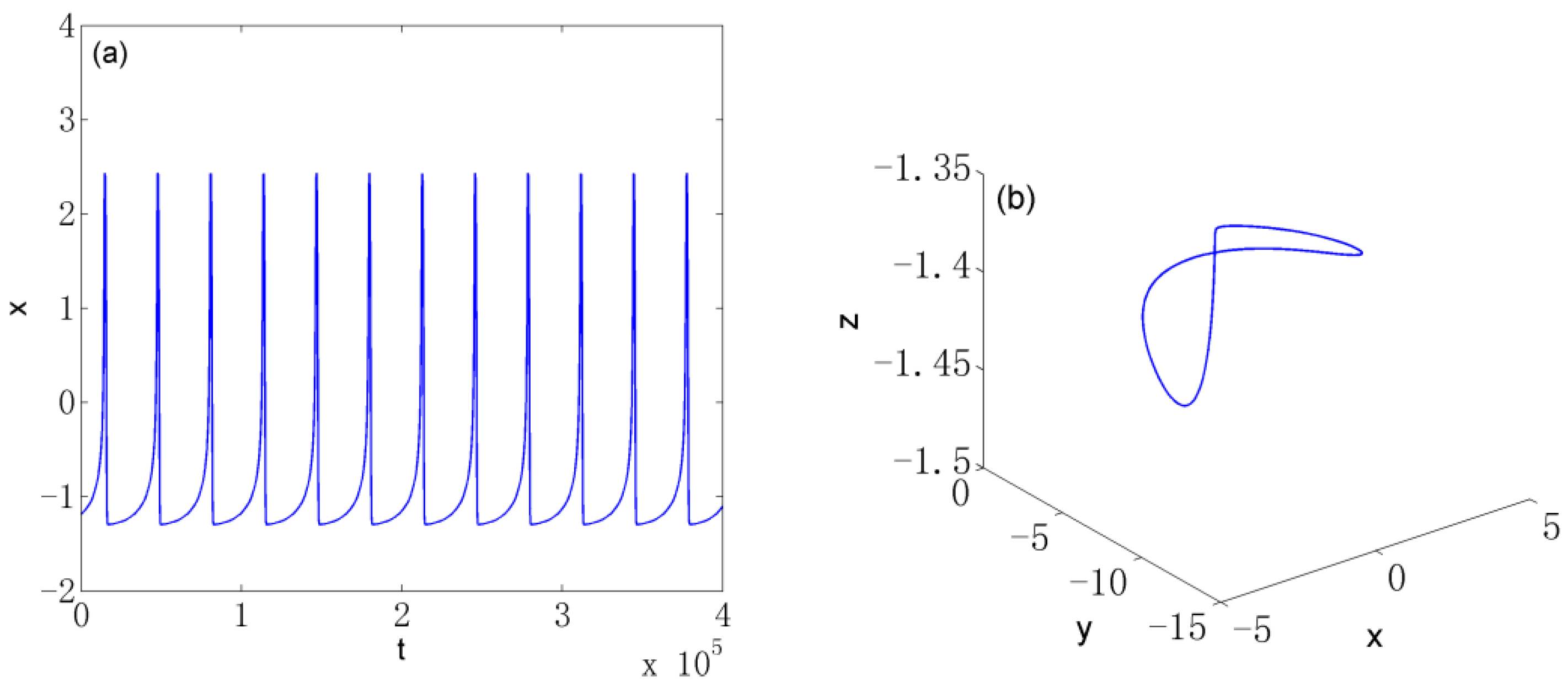
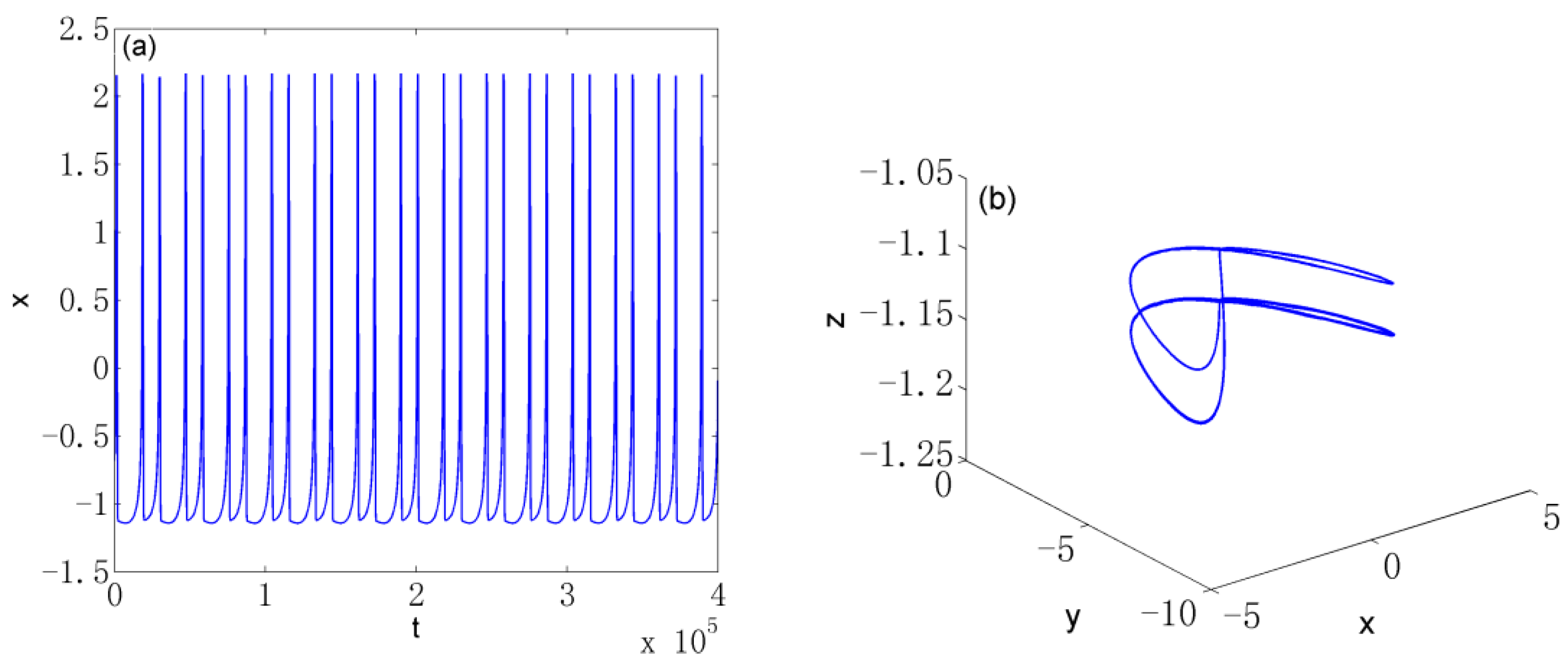
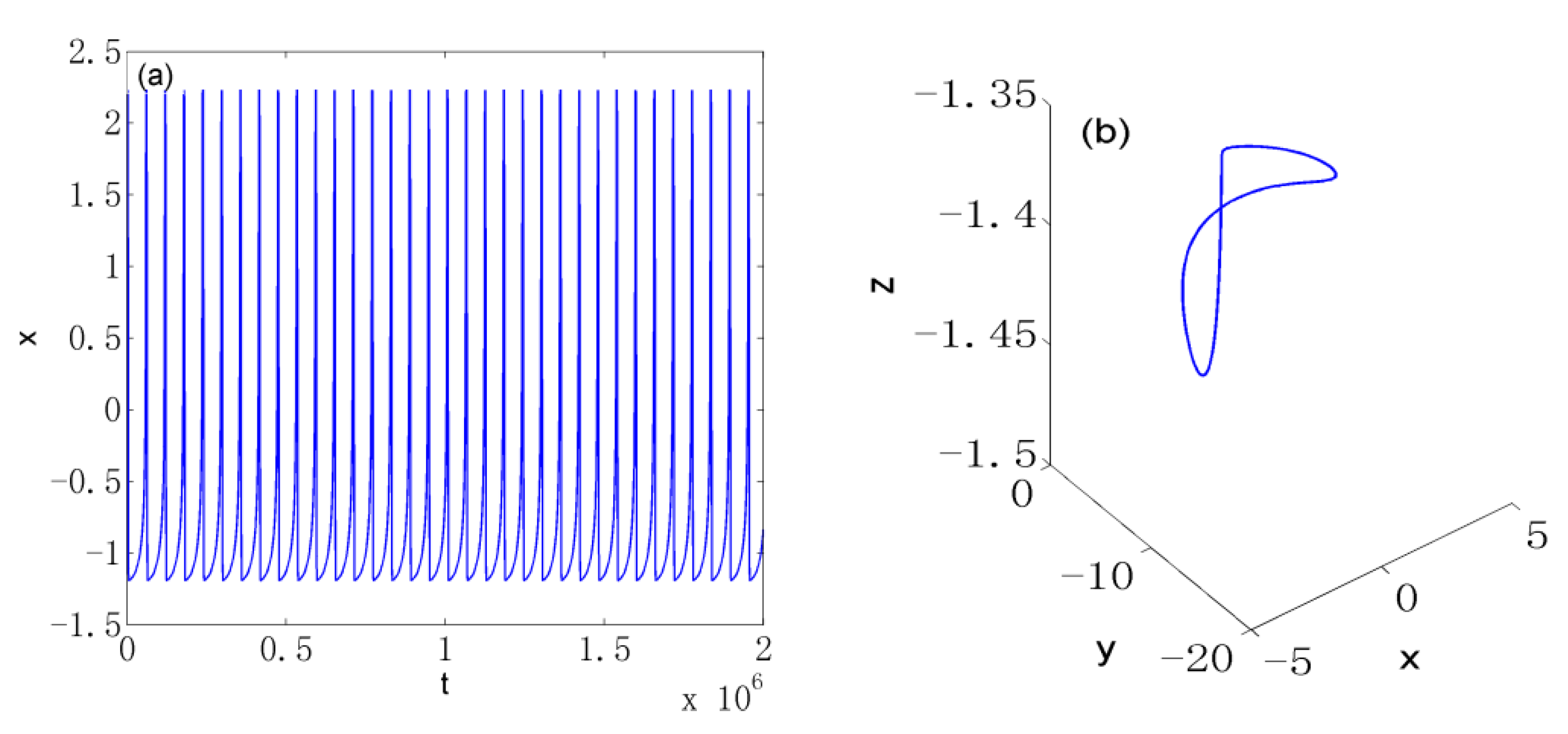
- The fractional-order extended Hindmarsh–Rose neuron has various hidden attractors with the change in system parameter or the order of fractional-order neuron models, such as period-1, period-2, period-4, chaotic, and multi-periodic attractors. Especially, the dynamics appear to have a phenomenon of period-doubling bifurcation leading to chaos with the decrease in order . Compared with the traditional self-excited attractor, research into hidden attractors of neuron systems is of great significance for understanding the complexity of dynamical behavior of neuron systems and revealing the mechanisms of neurological disorder.
- (2)
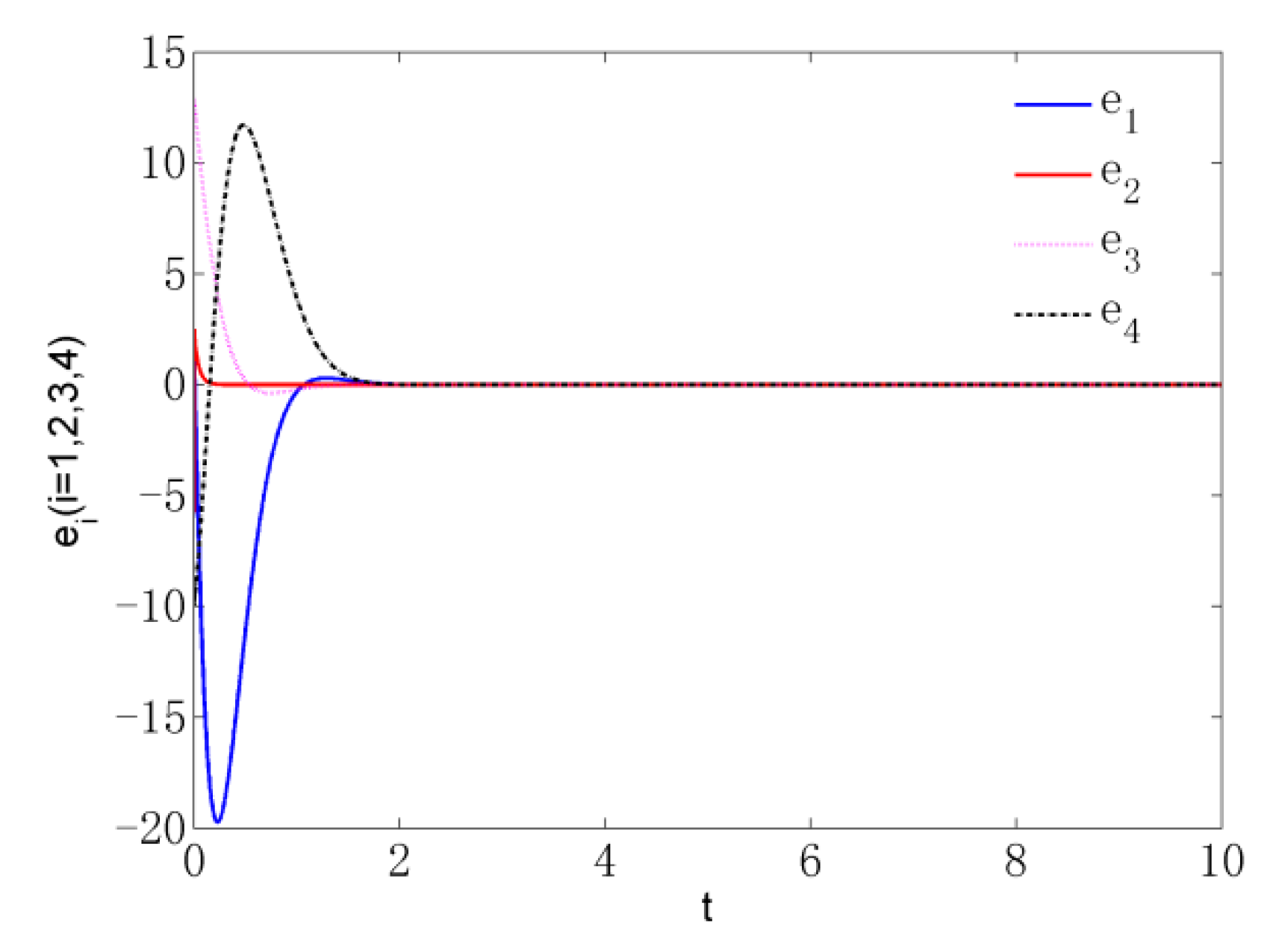
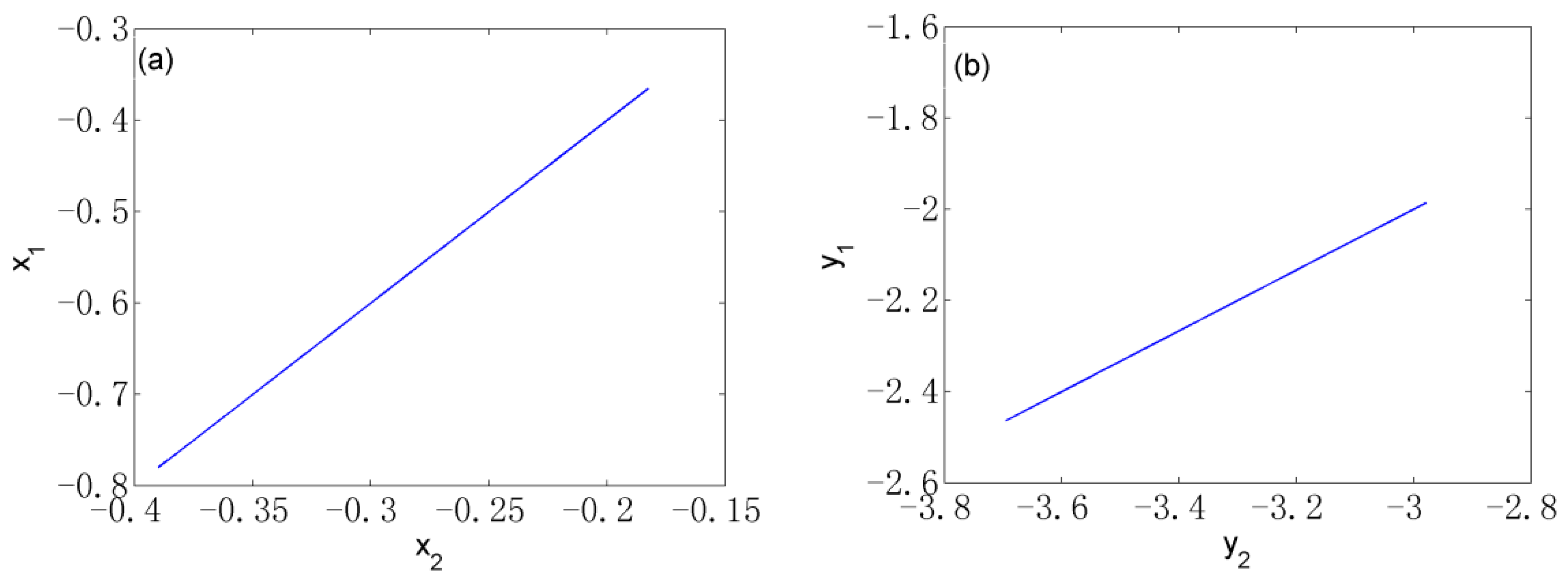
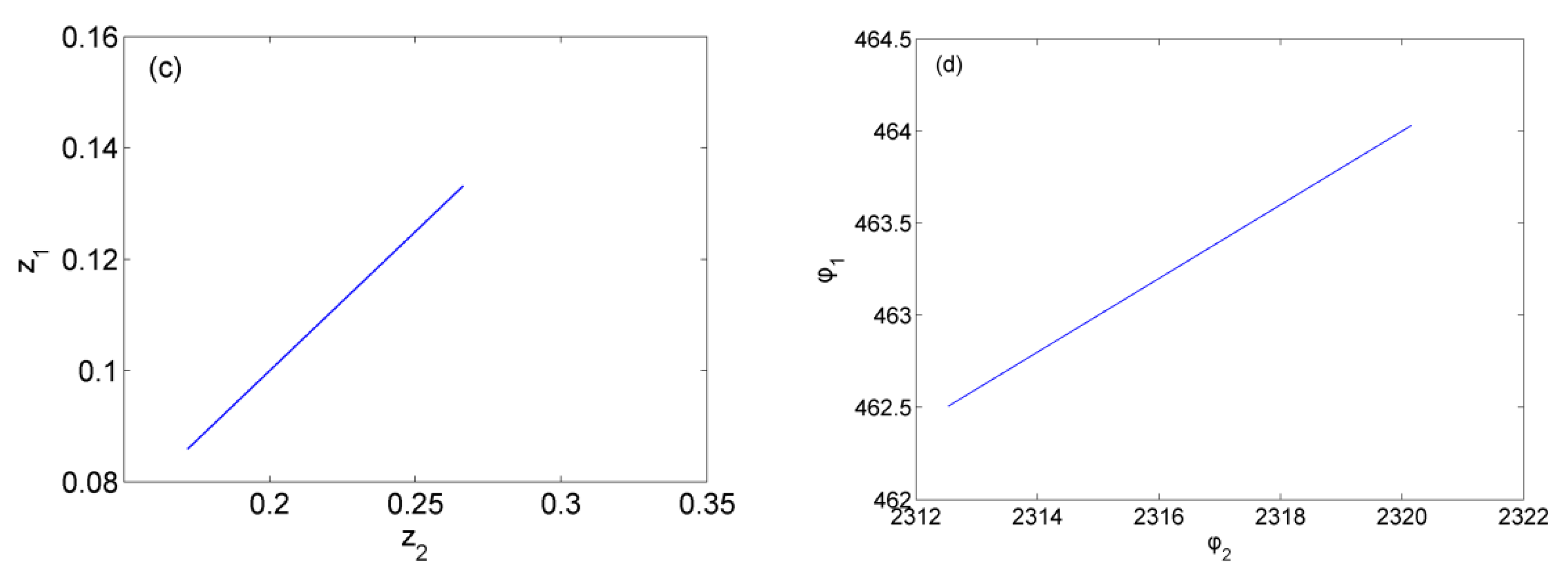
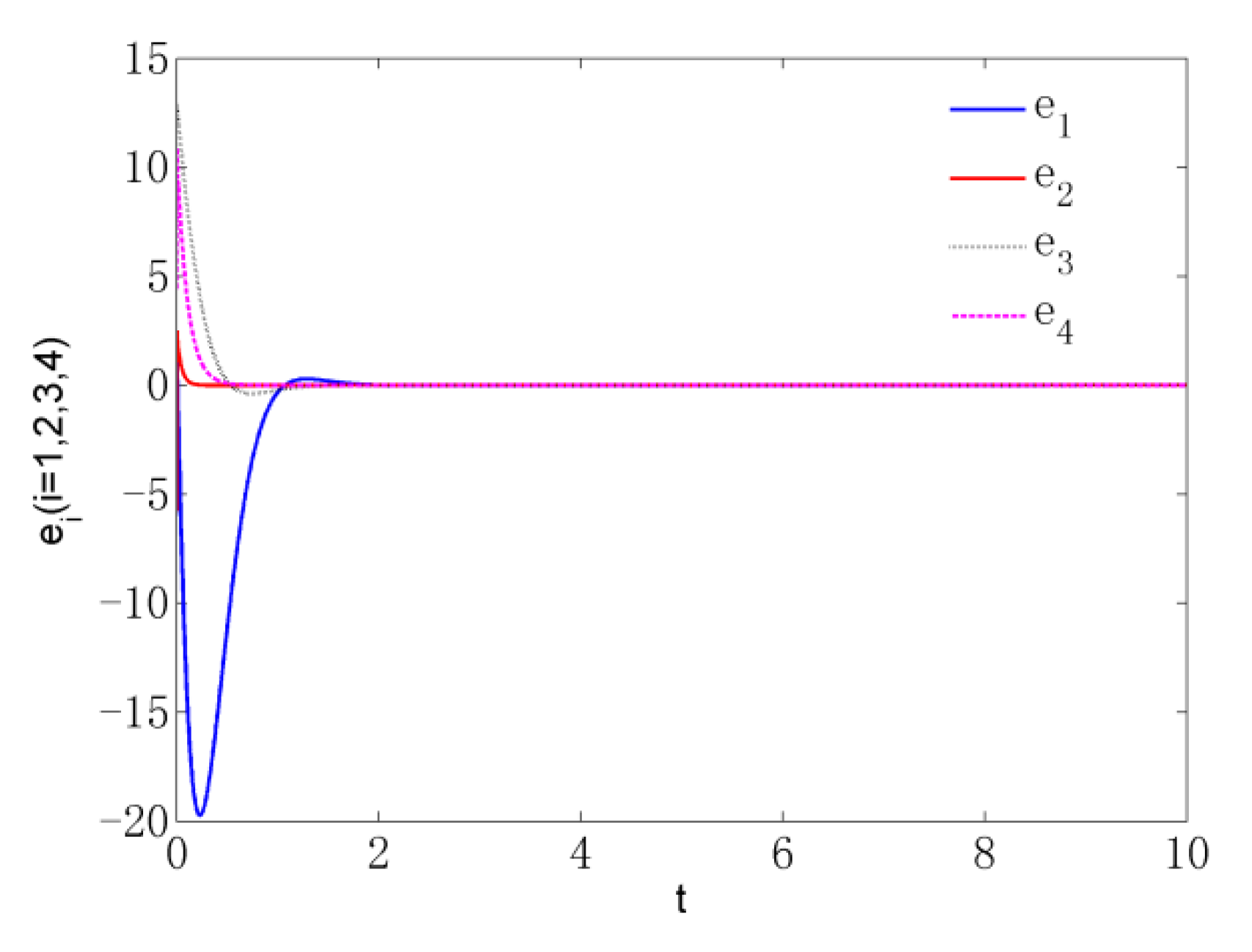
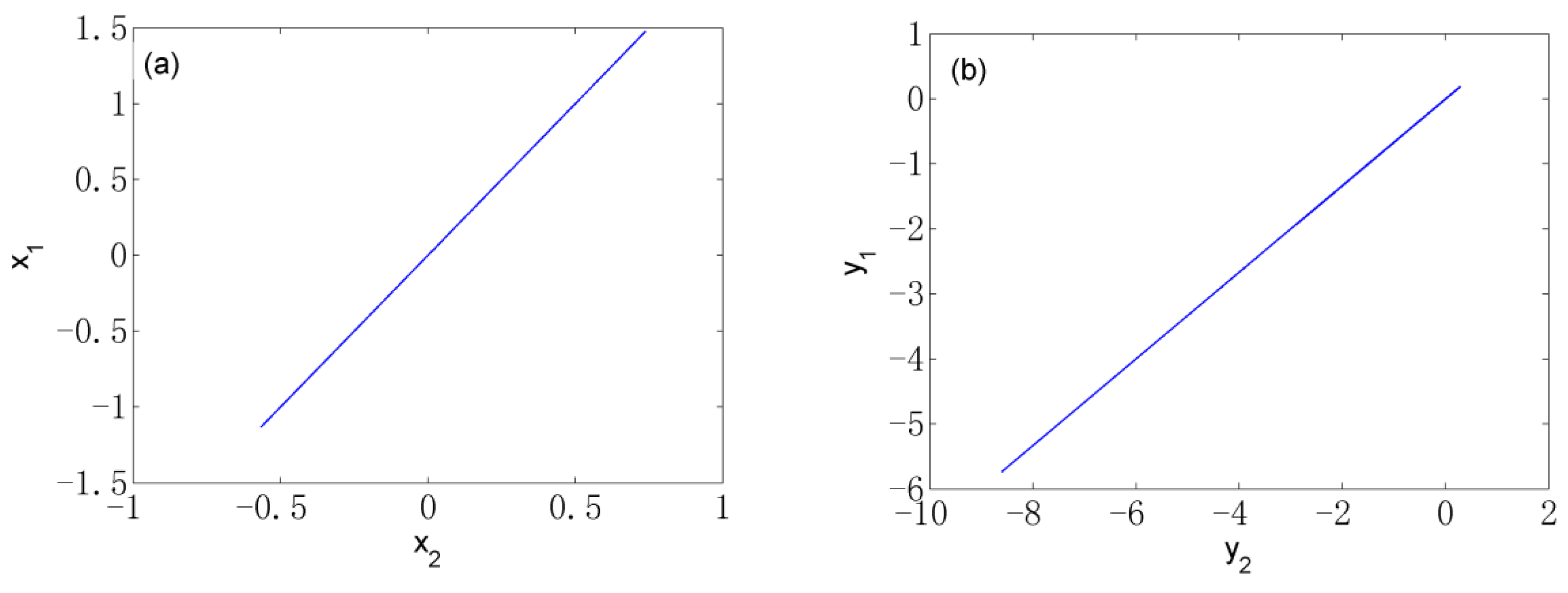
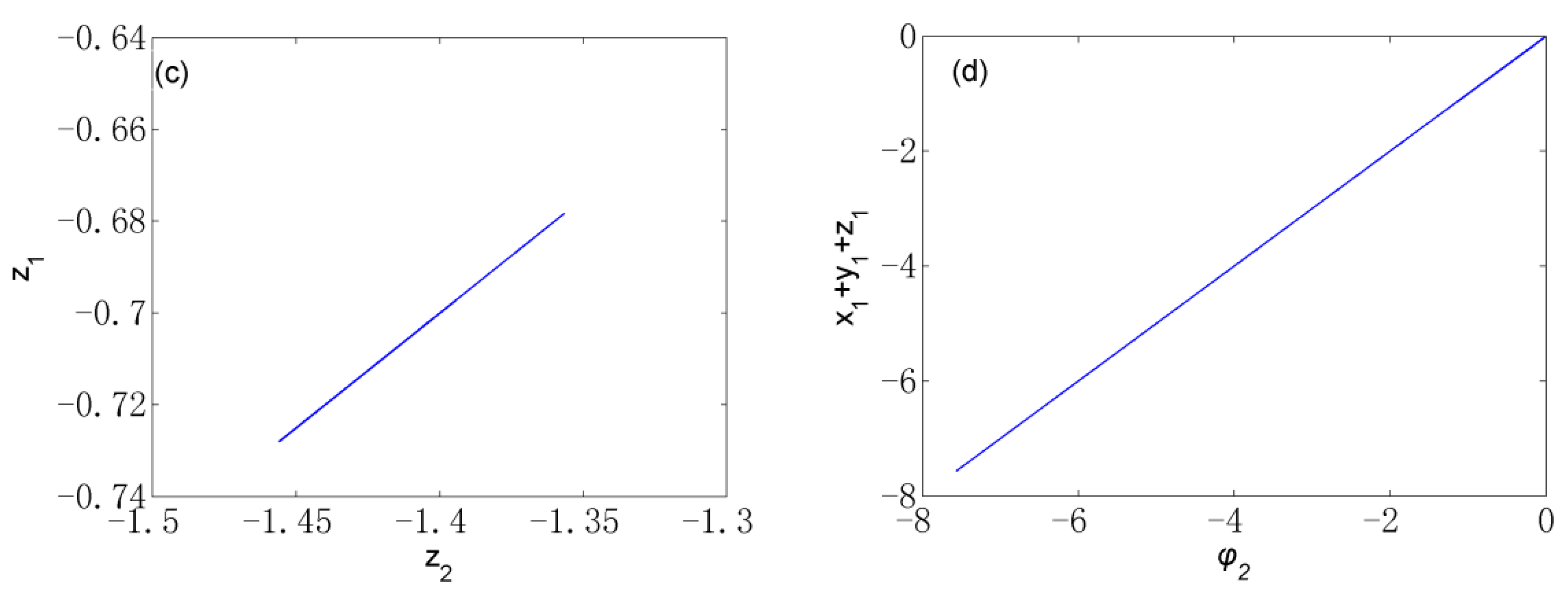
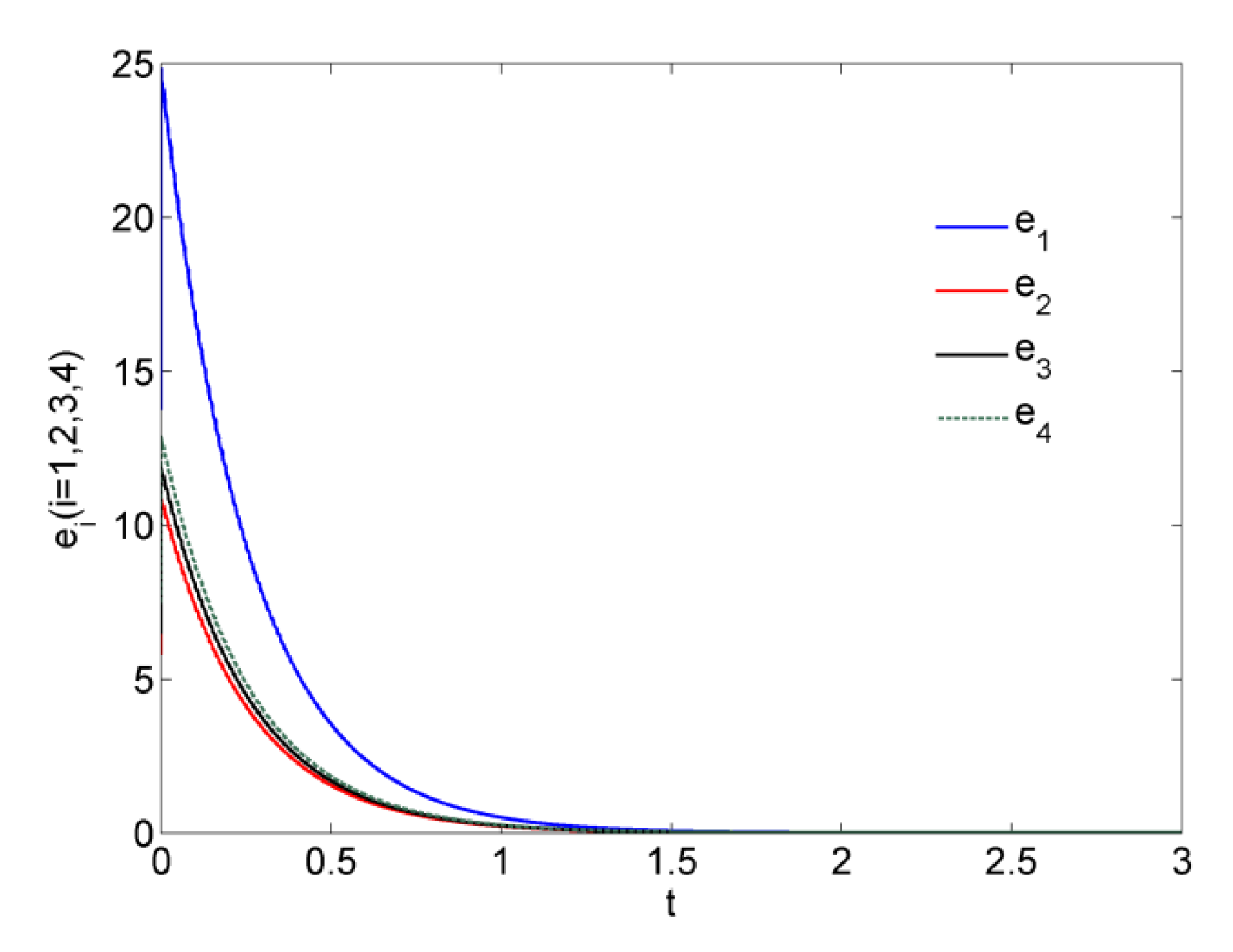
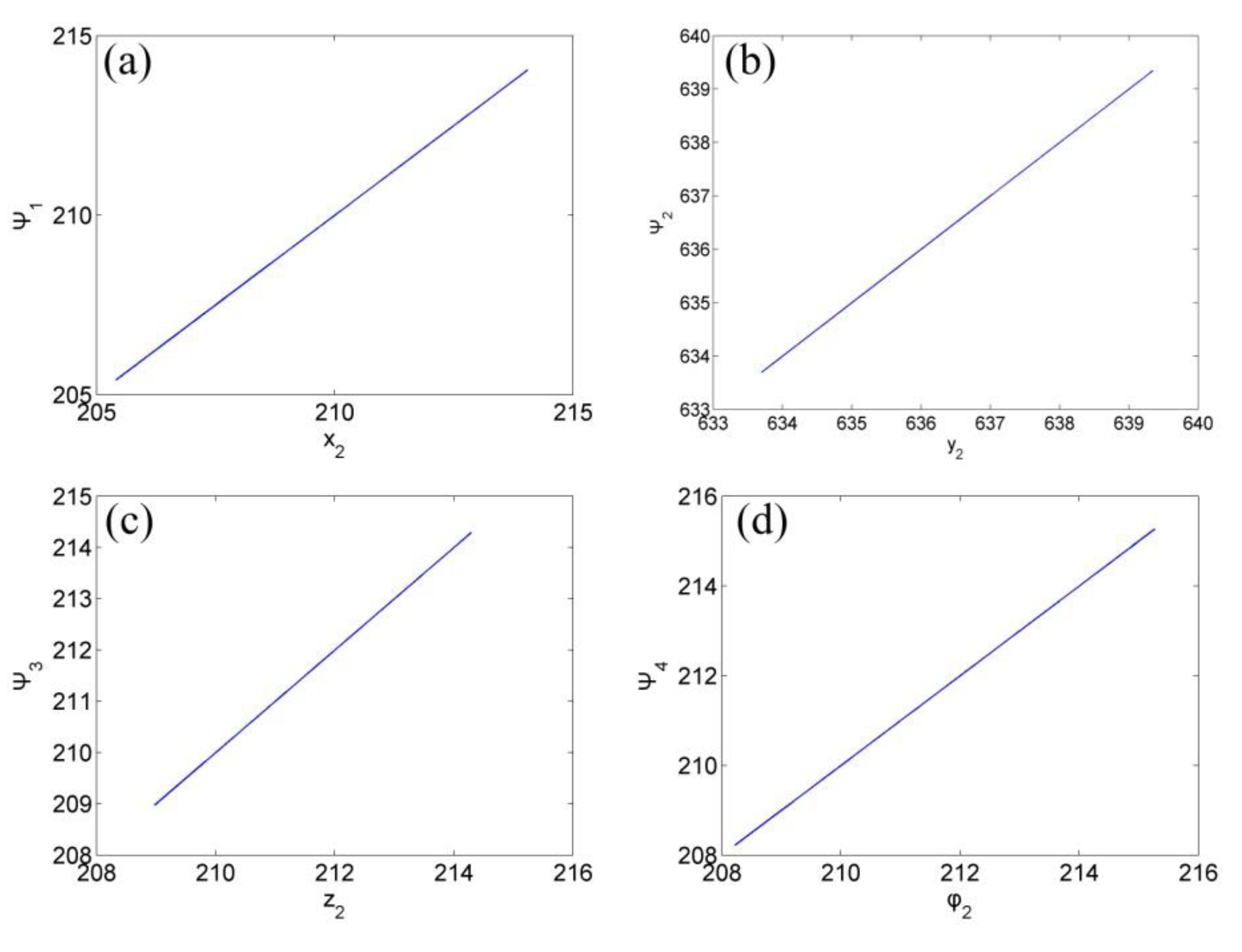
- Three kinds of hybrid projective synchronization schemes are given by designing suitable controllers. In addition, the efficiency and feasibleness of the proposed schemes are verified via theoretical analysis and numerical simulation. According to the results, the addressed synchronization method is suitable for both simple projection factors and more complex projection factors. Compared with many kinds of chaos synchronization, projective synchronization is one of the most noticeable types of synchronization. This is because different state variables of projective synchronization synchronize to a scaling factor. This scaling feature can be used to extend binary numbers to m-decimal numbers for faster transmission in secure communications. Hybrid projective synchronization in our work can further improve the security of secure communications because of the adjustability of scaling factors and synchronization variables.
- (3)
- By utilizing a proper hybrid projective synchronization scheme and designing a projection factor, system variables can synchronize various variables or a combination of several different variables. That is to say, the dynamics of fractional-order extended Hindmarsh–Rose neurons can be controlled to the given status effectively. This result has potential applications in terms of the functional integration of neurons and is helpful for exploring the integration mechanism of neurons. For example, different properties of objects can be unified and presented as a whole after being processed in specific visual areas of the brain. This means that various neurons’ function can be integrated by realizing the hybrid projective synchronization.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Hodgkin, A.L.; Huxley, A.F. Propagation of electrical signals along giant nerve fibres. Proc. R. Soc. Lond. 1952, 140, 177. [Google Scholar]
- Hindmarsh, J.L.; Rose, R.M. A model of the nerve impulse using two first-order differential equations. Nature 1982, 296, 162–164. [Google Scholar] [CrossRef] [PubMed]
- FitzHugh, R. Mathematical models of threshold phenomena in the nerve membrane. Bull. Math. Biol. 1955, 17, 257–278. [Google Scholar] [CrossRef]
- Chay, T.R. Chaos in a three-variable model of an excitable cell. Physica D 1985, 16, 233–242. [Google Scholar] [CrossRef]
- Morris, C.; Lecar, H. Voltage oscillations in the barnacle giant muscle fiber. Biophys. J. 1981, 35, 193–213. [Google Scholar] [CrossRef]
- Izhikevich, E.M. Simple model of spiking neurons. IEEE Trans. Neural Netw. 2003, 14, 1569–1572. [Google Scholar] [CrossRef] [PubMed]
- Baysal, V.; Saraç, Z.; Yilmaz, E. Chaotic resonance in Hodgkin-Huxley neuron. Nonlinear Dynam. 2019, 97, 275–1285. [Google Scholar] [CrossRef]
- Nobukawa, S.; Nishimura, H.; Yamanishi, T. Analysis of chaos route in hybridized FitzHugh- Nagumo neuron model. Trans. Inst. Sys. Ctrl. Info. Eng. 2017, 30, 167–174. [Google Scholar]
- Wouapi, K.M.; Fotsin, B.H.; Louodop, F.P.; Feudjio, K.F.; Njitacke, Z.T.; Djeudjo, T.H. Various firing activities and finite-time synchronization of an improved Hindmarsh-Rose neuron model under electric field effect. Cogn. Neurodyn. 2020, 14, 375–397. [Google Scholar] [CrossRef]
- Huang, C.L.; Sun, W.; Zheng, Z.G.; Lu, J.H.; Chen, S.H. Hopf bifurcation control of the M-L neuron model with type I. Nonlinear Dynam. 2017, 87, 755–766. [Google Scholar] [CrossRef]
- Feng, P.H.; Zhang, Z.Y.; Wu, Y. Stair-like frequency response of single neuron to external electromagnetic radiation and onset of chaotic behaviors. Int. J. Bifurcat. Chaos 2020, 30, 2050131. [Google Scholar] [CrossRef]
- Wang, R.B.; Tsuda, I.; Zhang, Z.K. A new work mechanism on neuronal activity. Int. J. Neural Syst. 2015, 25, 1450037. [Google Scholar] [CrossRef] [PubMed]
- Wang, R.B.; Wang, Z.Y.; Zhu, Z.Y. The essence of neuronal activity from the consistency of two different neuron models. Nonlinear Dynam. 2018, 92, 973–982. [Google Scholar] [CrossRef]
- Xie, Y.; Yao, Z.; Ma, J. Phase synchronization and energy balance between neurons. Front. Inform. Technol. Electron. Eng. 2022, 23, 1407–1420. [Google Scholar] [CrossRef]
- Gan, Q.; Wei, Y. Neuron model with potential applications in pulse-stream neural nets. Electron. Lett. 1992, 28, 755–756. [Google Scholar] [CrossRef]
- Karaca, Z.; Korkmaz, N.; Altuncu, Y.; Kilic, R. An extensive FPGA-based realization study about the Izhikevich neurons and their bio-inspired applications. Nonlinear Dynam. 2021, 105, 3529–3549. [Google Scholar] [CrossRef]
- Yu, Y.; Wang, Q.Y. Oscillation dynamics in an extended model of thalamic-basal ganglia. Nonlinear Dynam. 2019, 98, 1065–1080. [Google Scholar] [CrossRef]
- Yu, Y.; Hao, Y.Q.; Wang, Q.Y. Model-based optimized phase-deviation deep brain stimulation for Parkinson’s disease. Neural Networks 2020, 122, 308–319. [Google Scholar] [CrossRef]
- Peng, Y.P.; Wang, J.; Zheng, C.X. Study on dynamic characteristics’ change of hippocampal neuron reduced models caused by the Alzheimer’s disease. J. Biol. Dynam. 2016, 10, 250–262. [Google Scholar] [CrossRef]
- Lee, H.N.; Hyeon, S.J.; Kim, H.; Sim, K.M.; Kim, Y.; Ju, J.; Lee, J.; Wang, Y.X.; Ryu, H.; Seong, J. Decreased FAK activity and focal adhesion dynamics impair proper neurite formation of medium spiny neurons in Huntington’s disease. Acta Neuropathol. 2022, 144, 521–536. [Google Scholar] [CrossRef] [PubMed]
- Tanaka, M.; Homma, K.; Soejima, A. Histopathological changes of the spinal cord and motor neuron dynamics in SODI Tg mice. J. Toxicol. Pathol. 2022, 35, 129–133. [Google Scholar] [CrossRef] [PubMed]
- Wu, K.J.; Wang, T.J.; Wang, C.L. Study on electrical synapse coupling synchronization of Hindmarsh-Rose neurons under Gaussian white noise. Neural Comput. Appl. 2018, 30, 551–561. [Google Scholar] [CrossRef]
- Li, Y.Y.; Wei, Z.C.; Zhang, W.; Perc, M.; Repnik, R. Bogdanov-Takens singularity in the Hindmarsh-Rose neuron with time delay. Appl. Math. Comput. 2019, 354, 180–188. [Google Scholar] [CrossRef]
- Wang, S.J.; He, S.B.; Rajagopal, K.; Karthikeyan, A.; Sun, K.H. Route to hyperchaos and chimera states in a network of modified Hindmarsh-Rose neuron model with electromagnetic flux and external excitation. Eur. Phys. J-Spec. Top. 2020, 229, 929–942. [Google Scholar] [CrossRef]
- Djeundam, S.R.D.; Filatrella, G.; Yamapi, R. Desynchronization effects of a current-driven noisy Hindmarsh-Rose neural network. Chaos Soliton. Fract. 2018, 115, 204–211. [Google Scholar] [CrossRef]
- Chen, D.F.; Li, J.S.; Zeng, W.; He, J. Topology identification and dynamical pattern recognition for Hindmarsh-Rose neuron model via deterministic learning. Cogn. Neurodynamics 2022, 17, 203–220. [Google Scholar] [CrossRef]
- Goulefack, L.M.; Chamgoue, A.C.; Anteneodo, C.; Yamapi, R. Stability analysis of the Hindmarsh-Rose neuron under electromagnetic induction. Nonlinear Dynam. 2022, 108, 2627–2642. [Google Scholar] [CrossRef]
- Parastesh, F.; Rajagopal, K.; Alsaadi, F.E.; Hayat, T.; Pham, V.T.; Hussain, I. Birth and death of spiral waves in a network of Hindmarsh-Rose neurons with exponential magnetic flux and excitable media. Appl. Math. Comput. 2019, 354, 377–384. [Google Scholar] [CrossRef]
- Lv, M.; Wang, C.N.; Ren, G.D.; Ma, J.; Song, X.L. Model of electrical activity in a neuron under magnetic flow effect. Nonlinear Dynam. 2016, 85, 1479–1490. [Google Scholar] [CrossRef]
- Lu, L.L.; Bao, C.; Ge, M.Y.; Xu, Y.; Yang, L.J.; Zhan, X.; Jia, Y. Phase noise- induced coherence resonance in three dimension memristive Hindmarsh-Rose neuron model. Eur. Phys. J.-Spec. Top. 2019, 228, 2101–2110. [Google Scholar] [CrossRef]
- Moujahid, A.; Vadillo, F. Energy analysis of bursting Hindmarsh-Rose neurons with time- delayed coupling. Chaos Soliton. Fract. 2022, 158, 112071. [Google Scholar] [CrossRef]
- Yu, Y.J.; Shi, M.; Kang, H.Y.; Chen, M.; Bao, B.C. Hidden dynamics in a fractional-order memristive Hindmarsh-Rose model. Nonlinear Dynam. 2020, 100, 891–906. [Google Scholar] [CrossRef]
- Shi, M.; Yu, Y.J.; Xu, Q. Hopf bifurcation of the fractional-order hindmarsh- rose neuron model with time-delay. Rocky Mt. J. Math. 2021, 50, 2213–2222. [Google Scholar] [CrossRef]
- Meng, F.Q.; Zeng, X.Q.; Wang, Z.L.; Wang, X.J. Adaptive synchronization of fractional-order coupled neurons under electromagnetic radiation. Int. J. Bifurcat. Chaos 2020, 30, 2050044. [Google Scholar] [CrossRef]
- Liu, D.; Zhao, S.; Luo, X.Y. Adaptive fuzzy control for the generalized projective synchronization of fractional-order extended Hindmarsh-Rose neurons. IEEE Access 2020, 8, 190689–190699. [Google Scholar] [CrossRef]
- Malik, S.A.; Mir, A.H. Synchronization of fractional order neurons in presence of noise. IEEE ACM T. Comput. Bi. 2022, 19, 1887–1896. [Google Scholar] [CrossRef] [PubMed]
- Ramakrishnan, B.; Parastesh, F.; Jafari, S.; Rajagopal, K.; Stamov, G.; Stamova, I. Synchronization in a multiplex network of nonidentical fractional-order neurons. Fractal Fract. 2022, 6, 169. [Google Scholar] [CrossRef]
- Ren, J.J.; Wu, C. Advances in Lyapunov theory of Caputo fractional-order systems. Nonlinear Dynam. 2019, 97, 2521–2531. [Google Scholar] [CrossRef]
- Hu, J.B.; Han, Y.; Zhao, L.D. A stability theorem about fractional systems and synchronizing fractional unified chaotic systems based on the theorem. Acta Phys. Sin. 2009, 58, 4402–4407. [Google Scholar]
- Hu, J.B.; Han, Y.; Zhao, L.D. A novel stability theorem for fractional systems and its applying in synchronizing fractional chaotic system based on back-stepping approach. Acta Phys. Sin. 2009, 58, 2235–2239. [Google Scholar]
- Hindmarsh, J.L.; Rose, R.M. A model of neuronal bursting using three coupled first order differential equations. Proc. R. Soc. B 1984, 221, 87–102. [Google Scholar]
- Dong, J.; Zhang, G.J.; Xie, Y.; Yao, H.; Wang, J. Dynamic behavior analysis of fractional-order Hindmarsh-Rose neuronal model. Cognit. Neurodyn. 2014, 8, 167–175. [Google Scholar]
- Rajagopal, K.; Khalaf, A.J.M.; Parastesh, F.; Moroz, I.; Karthikeyan, A.; Jafari, S. Dynamical behavior and network analysis of an extended Hindmarsh-Rose neuron model. Nonlinear Dynam. 2019, 98, 477–487. [Google Scholar] [CrossRef]
- Giresse, T.A.; Crepin, K.T.; Martin, T. Generalized synchronization of the extended Hindmarsh -Rose neuronal model with fractional order derivative. Chaos Soliton. Fract. 2019, 118, 311–319. [Google Scholar] [CrossRef]



Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shi, X.; Wang, Z. Hybrid Projective Synchronization of Fractional-Order Extended Hindmarsh–Rose Neurons with Hidden Attractors. Axioms 2023, 12, 157. https://doi.org/10.3390/axioms12020157
Shi X, Wang Z. Hybrid Projective Synchronization of Fractional-Order Extended Hindmarsh–Rose Neurons with Hidden Attractors. Axioms. 2023; 12(2):157. https://doi.org/10.3390/axioms12020157
Chicago/Turabian StyleShi, Xuerong, and Zuolei Wang. 2023. "Hybrid Projective Synchronization of Fractional-Order Extended Hindmarsh–Rose Neurons with Hidden Attractors" Axioms 12, no. 2: 157. https://doi.org/10.3390/axioms12020157
APA StyleShi, X., & Wang, Z. (2023). Hybrid Projective Synchronization of Fractional-Order Extended Hindmarsh–Rose Neurons with Hidden Attractors. Axioms, 12(2), 157. https://doi.org/10.3390/axioms12020157