

Kantorovich Version of Vector-Valued Shepard Operators


{kind=link}
{kind=link}
Abstract
1. Introduction
2. Construction of the Operators and Main Theorems
3. Auxiliary Results and Proofs of the Main Theorems
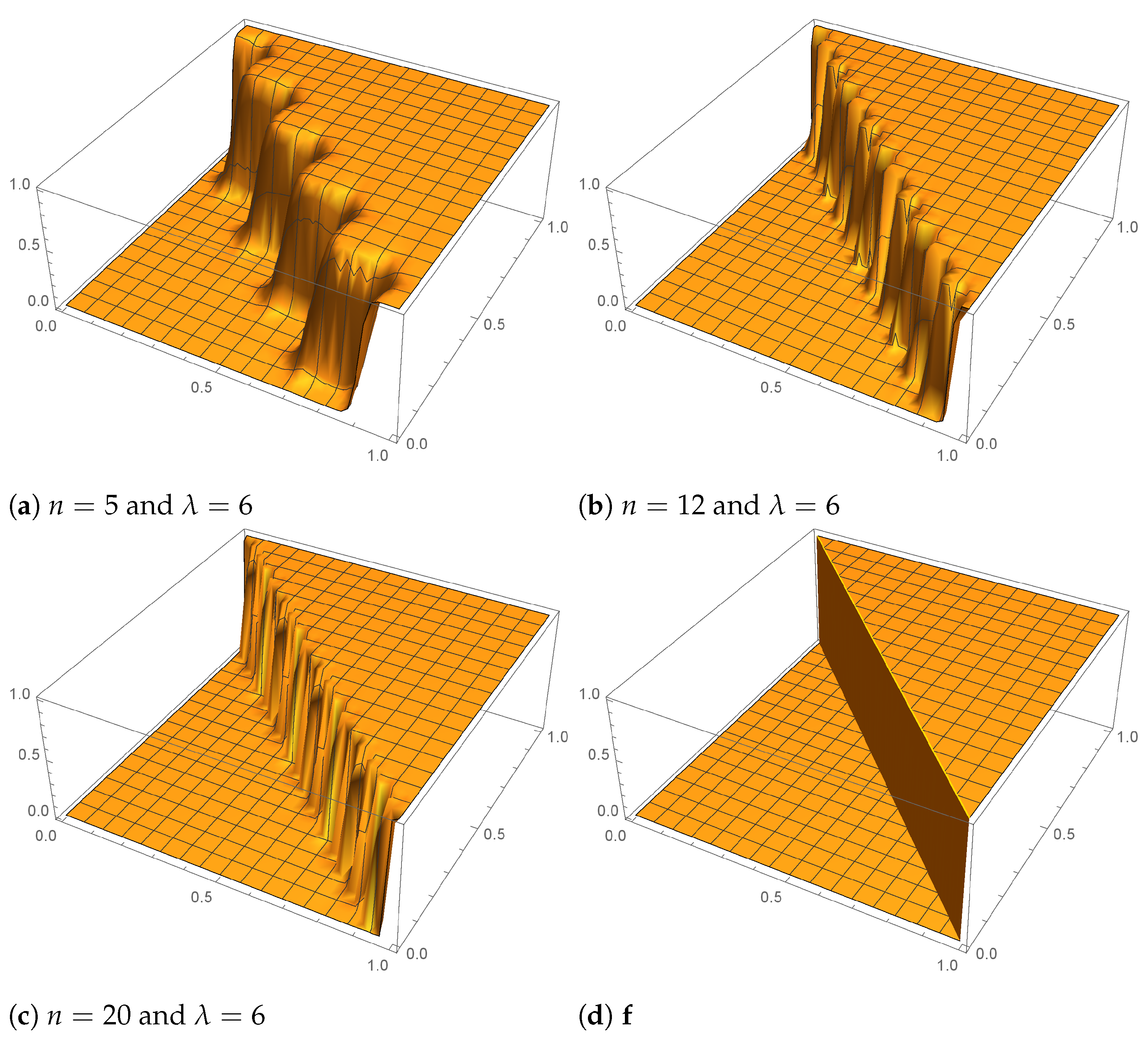
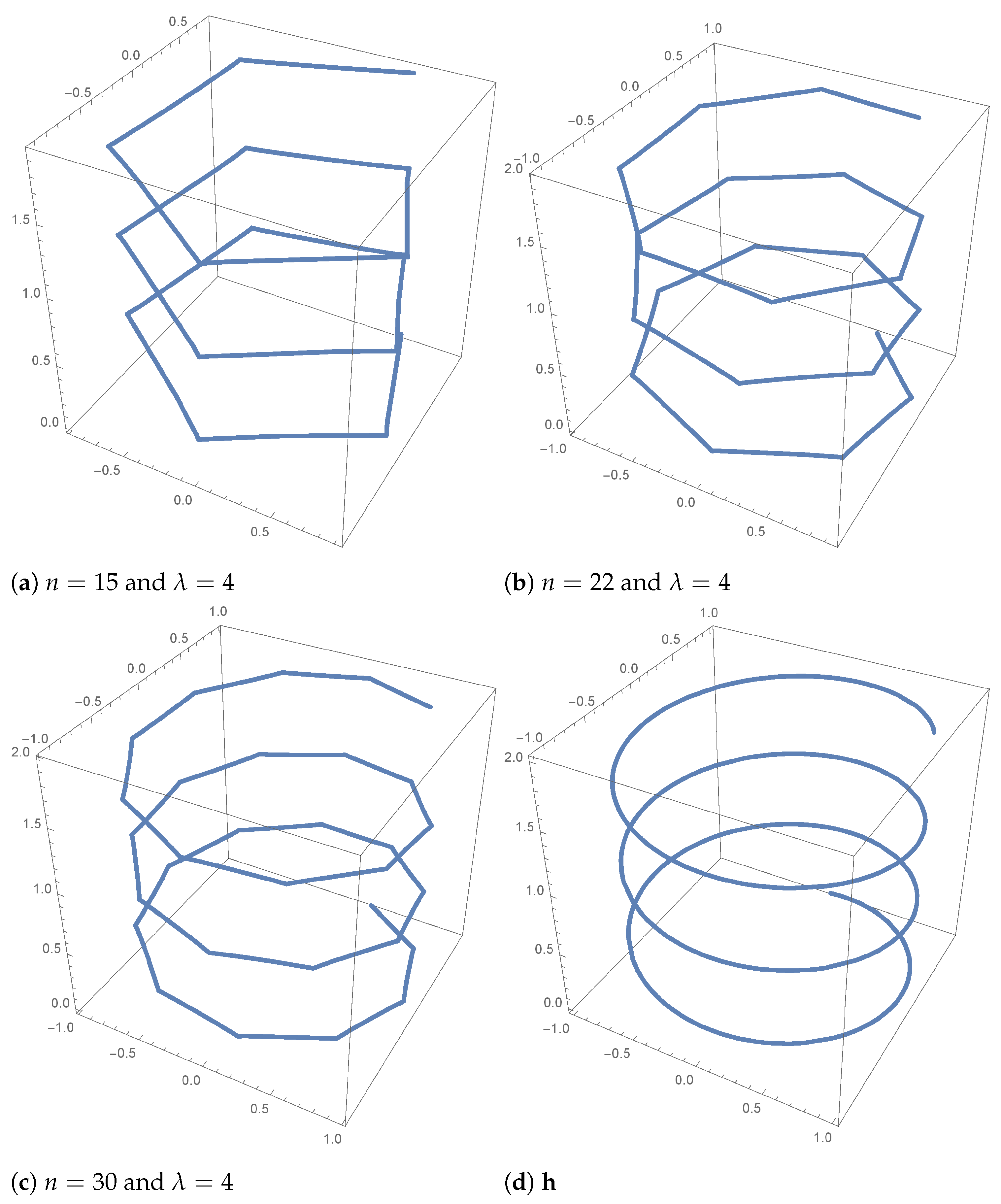
4. Illustrations and Concluding Remarks
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Bernstein, S. Démonstration du théorème de Weierstrass fondée sur le calcul des probabilités. Commun. Kharkov Math. Soc. 1913, XIII, 1–2. [Google Scholar]
- Kantorovič, L.V. Sur certains développements suivant les polynomes de la forme de S.Bernstein, I. Comptes Rendus L’AcadéMie Des Sci. L’Urss 1930, 20, 563–568. [Google Scholar]
- Kantorovič, L.V. Sur certains développements suivant les polynomes de la forme de S.Bernstein, II. Comptes Rendus L’AcadéMie Des Sci. L’Urss 1930, 20, 595–600. [Google Scholar]
- Angeloni, L.; Vinti, G. Multidimensional sampling-Kantorovich operators in BV-spaces. Open Math. 2023, 21, 20220573. [Google Scholar] [CrossRef]
- Costarelli, D. Approximation error for neural network operators by an averaged modulus of smoothness. J. Approx. Theory 2023, 294, 105944. [Google Scholar] [CrossRef]
- Costarelli, D.; Spigler, R. Convergence of a family of neural network operators of the Kantorovich type. J. Approx. Theory 2014, 185, 80–90. [Google Scholar] [CrossRef]
- Orlova, O.; Tamberg, G. On approximation properties of generalized Kantorovich-type sampling operators. J. Approx. Theory 2016, 201, 73–86. [Google Scholar] [CrossRef]
- Duman, O.; Vecchia, B.D. Vector-Valued Shepard Processes: Approximation with Summability. Axioms 2023, 12, 1124. [Google Scholar] [CrossRef]
- Shepard, D. A two-dimensional interpolation function for irregularly-spaced data. In Proceedings of the 23rd ACM National Conference, New York, NY, USA, 27–29 August 1968; pp. 517–524. [Google Scholar]
- Della Vecchia, B. Direct and converse results by rational operators. Constr. Approx. 1996, 12, 271. [Google Scholar] [CrossRef]
- Duman, O.; Della Vecchia, B. Complex Shepard operators and their summability. Results Math. 2021, 76, 214. [Google Scholar] [CrossRef]
- Duman, O.; Della Vecchia, B. Approximation to integrable functions by modified complex Shepard operators. J. Math. Anal. Appl. 2022, 512, 126161. [Google Scholar] [CrossRef]
- Farwig, R. Rate of convergence of Shepard’s global interpolation formula. Math. Comput. 1986, 46, 577–590. [Google Scholar] [CrossRef][Green Version]
- Hermann, T. Rational interpolation of periodic functions. In Supplemento ai Rendiconti del Circolo Matematico di Palermo, Proceedings of the Second International Conference in Functional Analysis and Approximation Theory, Acquafredda di Maratea, Italy, 14–19 September 1992; Circolo Matematico di Palermo: Palermo, Italy, 1993; Series 2; Volume 33, pp. 337–344. [Google Scholar]
- Zhou, X. The saturation class of Shepard operators. Acta Math. Hung. 1998, 80, 293–310. [Google Scholar] [CrossRef]
- Dell’Accio, F.; Di Tommaso, F. Complete Hermite–Birkhoff interpolation on scattered data by combined Shepard operators. J. Comput. Appl. Math. 2016, 300, 192–206. [Google Scholar] [CrossRef]
- Dell’Accio, F.; Di Tommaso, F. On the hexagonal Shepard method. Appl. Numer. Math. 2020, 150, 51–64. [Google Scholar] [CrossRef]
- Dell’Accio, F.; Di Tommaso, F.; Hormann, K. On the approximation order of triangular Shepard interpolation. IMA J. Numer. Anal. 2016, 36, 359–379. [Google Scholar] [CrossRef]
- Mikusiński, J. The Bochner Integral; Lehrbücher und Monographien aus dem Gebiete der Exakten Wissenschaften, Mathematische Reihe; Birkhäuser Verlag: Basel, Switzerland; Stuttgart, Germany, 1978; pp. xii+233. [Google Scholar] [CrossRef]
- Zygmund, A. Trigonometric Series, 3rd ed.; Cambridge Mathematical Library, Cambridge University Press: Cambridge, UK, 2003. [Google Scholar]
- Boos, J.; Cass, P. Classical and Modern Methods in Summability; Oxford Mathematical Monographs, Oxford University Press: Oxford, UK, 2000; p. 600. [Google Scholar]


Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Duman, O.; Della Vecchia, B.; Erkus-Duman, E. Kantorovich Version of Vector-Valued Shepard Operators. Axioms 2024, 13, 181. https://doi.org/10.3390/axioms13030181
Duman O, Della Vecchia B, Erkus-Duman E. Kantorovich Version of Vector-Valued Shepard Operators. Axioms. 2024; 13(3):181. https://doi.org/10.3390/axioms13030181
Chicago/Turabian StyleDuman, Oktay, Biancamaria Della Vecchia, and Esra Erkus-Duman. 2024. "Kantorovich Version of Vector-Valued Shepard Operators" Axioms 13, no. 3: 181. https://doi.org/10.3390/axioms13030181
APA StyleDuman, O., Della Vecchia, B., & Erkus-Duman, E. (2024). Kantorovich Version of Vector-Valued Shepard Operators. Axioms, 13(3), 181. https://doi.org/10.3390/axioms13030181