1. Introduction and Preliminaries
A first rigorous criterion for chaos in one-dimensional discrete dynamical systems, named
period three implies chaos, was established by Li and Yorke in their seminal paper [
1]. The definition of chaos given in that paper was the first rigorous description of chaos. A number of authors made attempts to extend this definition to multi-dimensional difference equations. One of the most used extensions of the definition of chaos to multi-dimensional cases was given by F. R. Marotto in [
2,
3,
4], who observed that the crucial properties of chaos are the following: the existence of an infinite number of periodic solutions of various minimal periods; the existence of an uncountably infinite set of points which exhibit random behavior; and the presence of a high sensitivity to initial conditions. Marotto extended Li–Yorke’s notion of chaos from one-dimensional to multi-dimensional by introducing the notion of a snap-back repeller in their famous theorem in 1978 [
2]. Also, see [
5]. However, the original result in [
2] has an error, which was noticed by several mathematicians, including P. Kloeden and Li [
6,
7]. The error was corrected by F. Marotto in [
8], where he redefined a snap-back repeller in 2005 [
8]. In this paper’s preliminary, we will give the corrected version of the definition for a snap-back repeller and then present Marotto’s corrected theorem [
3,
8].
Here is Marotto’s definition for “snap-back repeller” and then their theorem from [
2,
8].
Definition 1 ([
4]).
Let in a neighborhood of a fixed point of Φ.
We say that is a snap-back repeller if the following conditions are met:- (i)
All the eigenvalues of have a modulus greater than one ( is a repeller);
- (ii)
There exists a finite sequence such that , , and , which belongs to a repelling neighborhood of , and for .
Remark 1. It is clear that Definition 1 still implies that the sequence , where for all , satisfies and as , making this set of points a homoclinic orbit. Furthermore, since all for lie within the local unstable manifold of the map Φ
at the fixed point , where Φ
is , and since for , then this homoclinic orbit is transversal in the sense that Φ
is in a neighborhood of each for all . See [4]. Theorem 1 ([
2]).
If a map Φ
possesses a snap-back repeller, then Φ
is chaotic in the sense of Li–Yorke. That is, the following exist:- 1.
A positive integer N, such that Φ has a point of period p, for each integer ;
- 2.
A “scrambled set” of Φ , i.e., an uncountable set W containing no periodic points of Φ , such that
- (a)
;
- (b)
for all , with ;
- (c)
for all , with and periodic point of Φ ;
- 3.
An uncountable subset of W such that , for every .
In this paper, we investigate the existence of Li–Yorke chaos for the following system of difference equations:
where the parameters
and
are positive;
is the step size of the numerical method in the process of transferring a continuous model into a discrete counterpart. System (
1) was obtained by the explicit Euler finite discretization of the following system of differential equations [
9]:
which was used as the model for glycolysis decomposition in [
9]. In this model, glucose decomposes in the presence of various enzymes, including ten steps in which five are termed the preparatory phase, while the remaining five steps are called the pay-off phase.
In [
9], the authors, using a non-standard finite discretization, obtained a different discrete analogon of the glycolytic oscillator model (
2). They investigated the Neimark–Sacker bifurcation and hybrid control in their discrete model, but the local dynamics were not studied in detail. The reason is probably that the local dynamics were quite complicated and involved. See [
10,
11,
12] for related results.
System (
1) is a cubic polynomial system, which is well known to exhibit chaotic behavior. The global dynamics of such a system can be quite complicated, as we have shown in a series of papers [
13,
14]. An interesting problem is whether the local stability of System (
1) implies the global stability of such a system and, in general, if System (
1) is structurally stable. As we showed in [
13,
14] proving global stability requires different techniques and it might be more difficult to prove than a complicated, chaotic behavior. The case when the equilibrium of System (
1) is a saddle point probably requires finding the stable and unstable manifolds or sets and using them to obtain the dynamics of that system (see [
13]).
In this paper, we present the complete local dynamics of model (
1) in
Section 2. The local stability dynamics indicate the regions where Li–Yorke chaos is possible. Then, we prove the existence of Li–Yorke chaos in such a region by finding the snap-back repeller using a similar technique to that in [
15]. One should mention that Li–Yorke chaos is common for many polynomial and rational systems of difference equations (see [
16,
17,
18]), with the simplest and oldest being Hénon’s map and system (see [
4]). The techniques of rigorous proofs of chaos in dimensions higher than one are often based on Theorem 1. The other less rigorous techniques are based on calculations of Lyapunov exponents and the fractal dimension. See [
19,
20,
21,
22] for many examples of chaotic two-dimensional systems.
2. Local Stability Analysis
System (
1) has a unique (positive) equilibrium point
. The investigation of the nature of the local stability of equilibrium point
is based on the well-known result of Theorem 2.12 in [
19] or in [
20,
21,
22].
The map
T corresponding to System (
1) is of the form
and the Jacobian matrix of the map
T is of the form
from which we obtain
and
The corresponding characteristic equation has the form
which in the equilibrium
becomes
Since
, by applying Theorem 2.12 in [
19], we obtain the following result about the local dynamics of equilibrium point
:
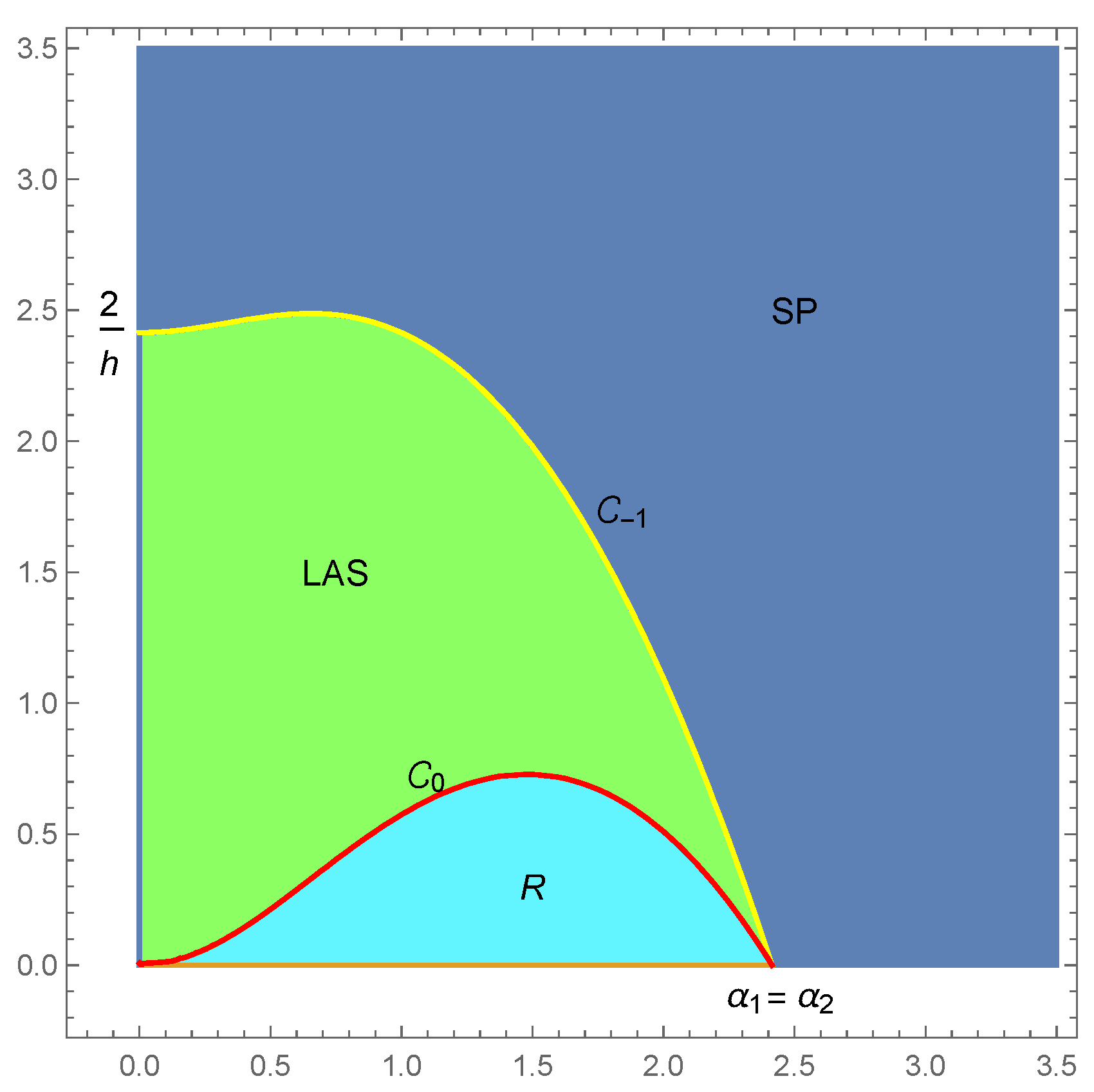
Let
be fixed. Then,
and
where
and
are continuous functions such that
for
and
for
. Note that
and
are the abscissas of the intersection points of curves
and
with the
-axis, respectively, and
and
are the abscissas of the intersection points of curves
and
with the
-axis, in the
-plane. Let
and
be the graphs of the functions
and
in the positive quadrant, respectively (excluding the points on the axes). It is easy to see that
if
(i.e.,
) and
if
(i.e.,
), where
.
Now, assume that
,
, and
. Then, we have that
and
where
. Namely,
which is true for every
. On the other hand,
For
and
, inequality (
5) is true because
Also, for
and
, (
5) is true because
By using Theorem 2.12 in [
19], we see that
and
if
and
which means that
and
are conjugate complex, and
.
We will now prove that
when
.
First, note that
if
,
, and
, where
Also, if
, then
. It implies that
which is impossible.
By Theorem 2.12 in [
19], it means that
and
if
and
Also, note that it can be easily verified that
is valid at all points below the curve
, and
is valid at all points above that curve. Likewise, in all points below the curve
,
is valid, and in all points above that curve,
is valid. See
Figure 1,
Figure 2 and
Figure 3.
Denoting
we have thus completed the proofs of the following two lemmas.
Lemma 1. If , , and , then the unique equilibrium point of System (1) is as follows: - 1.
Locally asymptotically stable if - 2.
A repeller if ;
- 3.
A saddle point if ;
- 4.
A non-hyperbolic with
- (a)
and being conjugated complex, and if and ;
- (b)
and if and .
Lemma 2. If , , , , and , then the equilibrium point of System (1) is as follows: - 1.
Locally asymptotically stable if ;
- 2.
A repeller if ;
- 3.
A saddle point if ;
- 4.
A non-hyperbolic with
- (a)
and being conjugated complex, and if and ;
- (b)
and if , , and ;
- (c)
The characteristic polynomial of the form at the point , so the eigenvalues are .
3. Li–Yorke Chaos for
In order to prove the existence of Li–Yorke chaos, we will consider the corresponding eigenvalues with a modulus greater than one for
and the set
and
We prove that the positive equilibrium point
of System (
1) is a snap-back repeller. The next step is to determine a neighborhood
of
in which the norms of eigenvalues exceed one for all
. It means that we need to solve the following system of inequalities,
, and
, where
is the characteristic polynomial of (
3), i.e., we will solve the following system of inequalities:
The first inequality in (
7) is always satisfied. Curves
and
, where
are hyperbolas that intersect in the first quadrant at the point
for
. The assumptions
and
imply that
Namely,
is equivalent to
which is satisfied if
Since
, it follows that
, so inequality (
8) is true.
Notice that
and
so a neighborhood
of
, in which the norms of eigenvalues exceed one for all
, is determined with
, where
and
for
.
In this way, we obtained the following result.
Lemma 3. Let , and , where is given by (6). Then, , where is defined by (9) and (10) is a repelling area of the equilibrium point . To continue investigating the conditions under which the equilibrium point will be a snap-back repeller, we will take a fixed value of the parameter h, for example, .
Now, if
, then
and
. A repelling area of the equilibrium point
is
, where
To prove that the equilibrium point
is a snap-back repeller for
, we need to find points
and
such that
By calculating the inverse iterations of the fixed point
twice, we are looking for the point
,
,
, as the solution of the following system:
for
which is the solution of the system
The solutions of System (
12) are
where
and
By using
, it is easy to see that
.
Now, we prove that
considering that
Suppose that
. Then,
If
, we have a contradiction with
, such that
. However, if
, since
, we have that
which for
has only one positive solution
This implies that
, which is a contradiction. Therefore, it is true that
if
.
Similarly, we conclude that if .
Now, note the following fact: for
, we have
In the next step, we will solve System (
11) for
. From the second equation in System (
11), we obtain
This implies
, i.e.,
. After substituting
x in the first equation of System (
11), we obtain
Let
i.e.,
By using the facts
and
, we obtain
Considering (
13), Equation (
15) is satisfied if
or, equivalently,
It implies that
, i.e.,
. On the other hand,
which implies
. If
, we denote
Now, from (
14) we obtain
By using the fact that
and
, we have that
Let us show that
. Otherwise, if
, then
Since
, the left side of the past equality is negative, which is impossible. It means that
holds.
Therefore, under certain conditions on the parameters, we have that
for
is continuous for and ;
.
By the Implicit Function Theorem, there exists a unique function and such that
- (i)
.
- (ii)
for .
- (iii)
is continuous in .
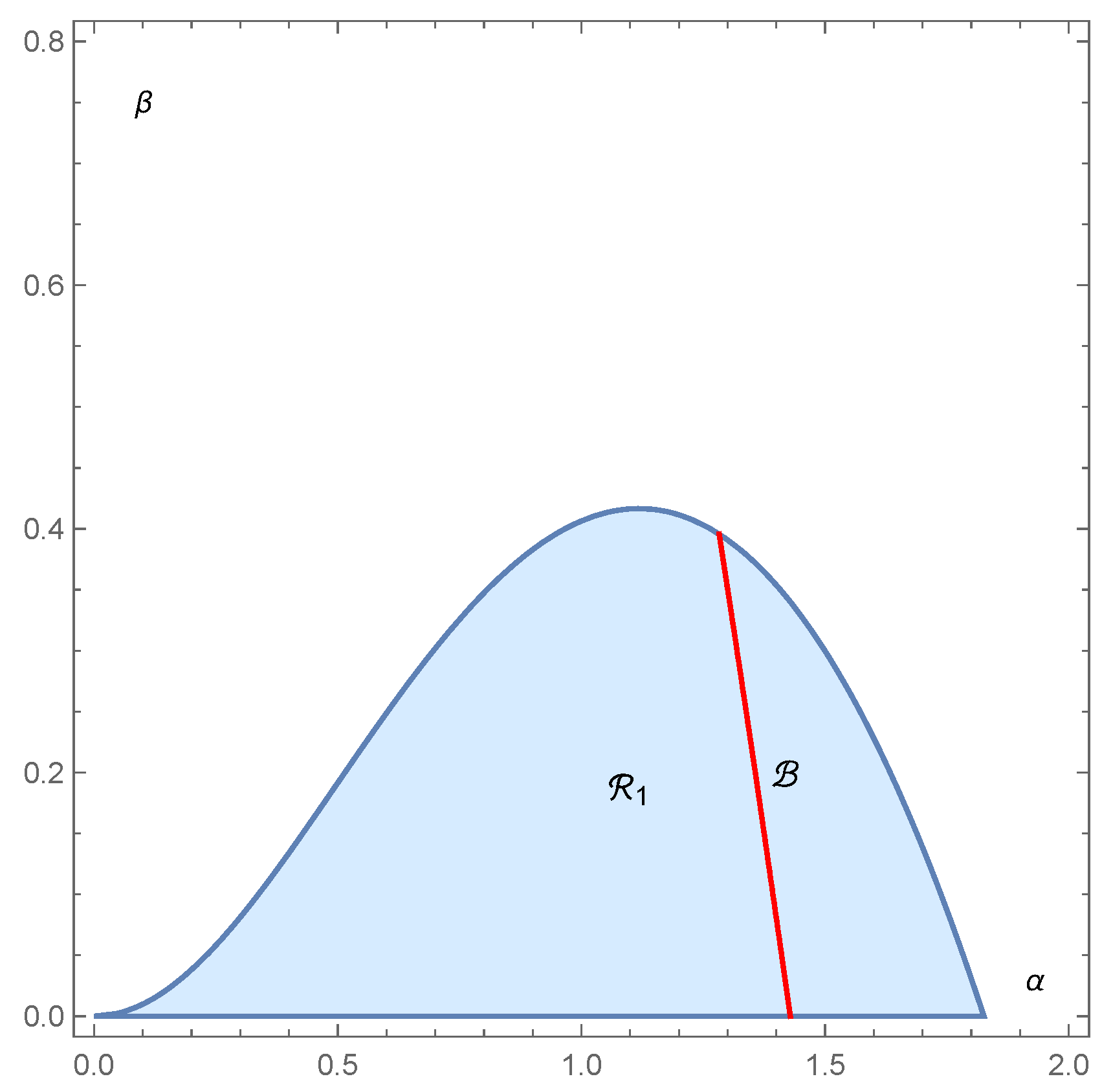
Figure 4 shows the area of the parameters for which the equilibrium point is a repeller and the set
in the
-plane.
Let
and
for
. Then,
belongs to
for a small enough
. Assume that
is arbitrary and let
Finally, let
where
and
Also,
and
are the second coordinates of the intersection points of the line given by the equation
with the curves
and
, respectively.
Theorem 2. Assume that , and . Then, there exists β near such that is a snap-back repeller of System (1) and, consequently, System (1) is chaotic in the sense of Li–Yorke. 4. Numerical Simulations
In many articles, the appearance of chaos is established by the existence of positive Lyapunov coefficients (e.g., [
15]). Although we proved the existence of chaos in the previous section using the Marotto method, we will make several corresponding numerical simulations by calculating the Lyapunov coefficients. Most of the experimentalists in dynamical systems theory take the existence of positive Lyapunov coefficients as enough evidence for the existence of chaos (see [
23,
24,
25,
26]). In that case, different software packages, such as
Dynamica in [
19] or
Chaos in [
25,
26], are used to justify the use of the word chaos. Also, see the references in [
23].
If
, then
Let us choose
close to
. Now,
, where
and
See
Figure 5a.
The solutions of System (
12) are the equilibrium point and
where
The solution of System (
11) for
which belongs to
is
Therefore,
The Jacobian matrix of
T at the point
has an eigenvalue
with
, at point
has eigenvalues
and
, and at point
has eigenvalues
and
.
For
, we have that
Next,
and
are the second coordinates of the intersection points of the line given by the equation
with the curves
and
, respectively. Then,
where
and
See
Figure 5b.
Figure 6 represents the phase portrait with 30 iterations with repelling area
and neighborhood
of the snap-back repeller
. Furthermore,
Figure 6 shows the points in (
16).
Now, assume that and . Then, there exists such that . In that case, if , the region is a circle.
Figure 7 represents a phase portrait with 30 iterations and the snap-back repeller
. Here,
where
If we suppose that
and
, then
Figure 8a shows a snap-back repeller with
The graph represents a phase portrait with 70 iterations.
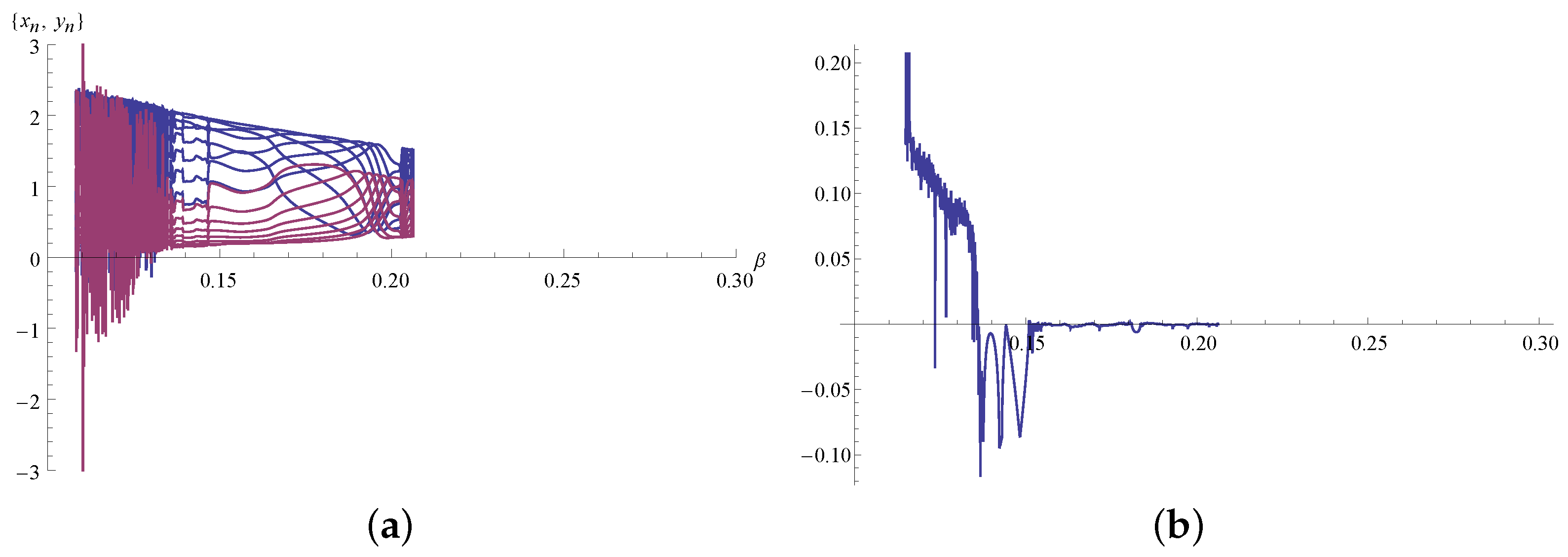
Figure 8b represents a phase portrait with 11170 iterations (we obtained a chaotic attractor due to the accumulation of rounding errors). In
Figure 9a and
Figure 10a, the bifurcation diagrams are generated by code Bif2D from [
23], and in
Figure 9b and
Figure 10b corresponding Lyapunov coefficients are generated by the code in [
24].
5. Conclusions
We consider a chaotic dynamic of System (
1), which is the Euler discretization of System (
2), which was used as the model for glycolysis decomposition in [
9]. System (
1) has a unique positive equilibrium, which locally can have any character depending on the parameter region. That is, this unique equiibrium solution can be either locally symptotically stable or repeller, saddle point, or non-hyperbolic. The global dynamics of such a system can be quite complicated and could include the existence of an infinite number of period-two solutions or equilibrium solutions, as we have shown in a series of papers [
13]. In this paper, we focus on the case when this equilibrium is a repeller and prove that in this case there exists a region of parameters where System (
1) exhibits chaos. The quite challenging problem is whether the local stability of System (
1) implies the global stability of such a system and, in general, if System (
1) is structurally stable. At this time, we are leaving these problems for future research.



 ,
, 

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}









