Abstract
The possible positions of an equilateral triangle whose vertices are located on the support sides of a generic triangle are studied. Using complex coordinates, we show that there are infinitely many such configurations, then we prove that the centroids of these equilateral triangles are collinear, defining two lines perpendicular to the Euler’s line of the original triangle. Finally, we obtain the complex coordinates of the intersection points and study some particular cases.
MSC:
51K99; 51M16; 51P99
1. Introduction
Let be a triangle in the Euclidean plane, and denote the complex coordinates of the vertices A, B, and C by a, b, and c, respectively. We examine some geometric properties of the equilateral triangles whose vertices are located on the support sides of , that is, , , and .
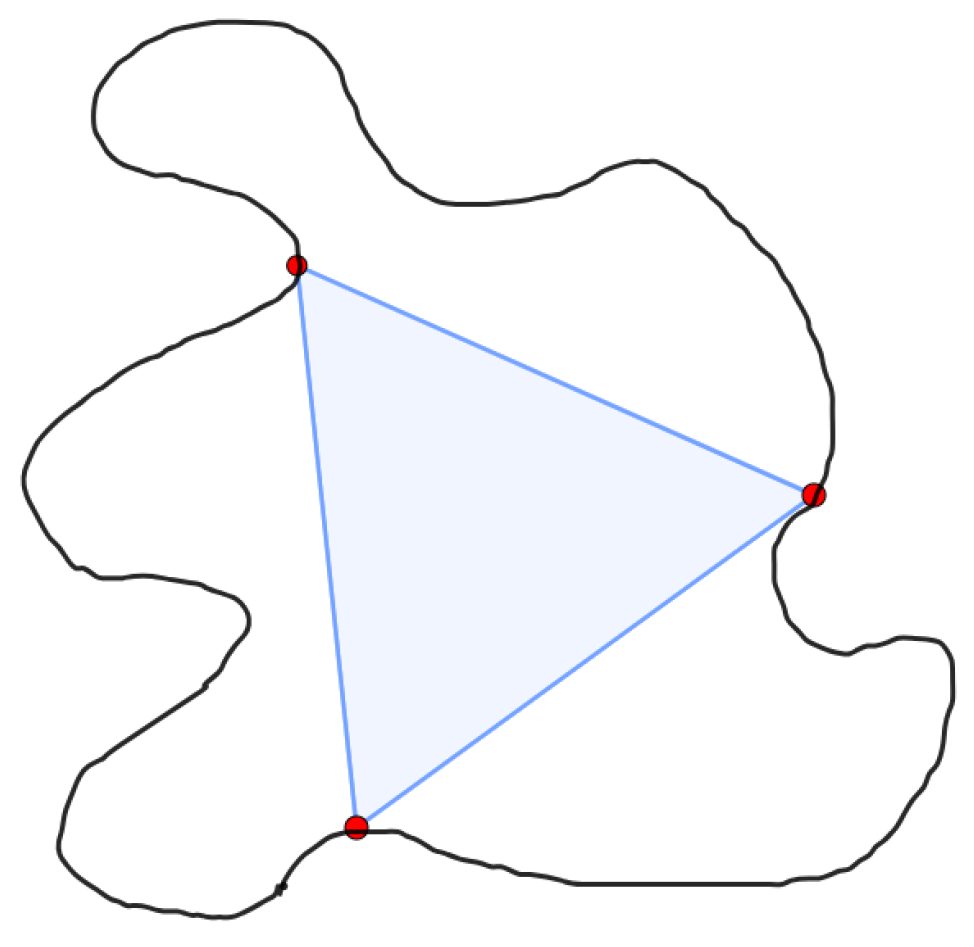
The problem studied in this paper is related to a known general topological property. The polygon is said to be inscribed in the Jordan curve (not necessarily contained in the interior of ) if all the vertices of are located on [1]. While Jordan curves can be complicated, they satisfy certain regular properties in this respect. For example, Meyerson [2] showed that an equilateral triangle can be inscribed in every Jordan curve, as illustrated in Figure 1. Later on, Nielsen proved the following result ([3], [Theorem 1.1]): Let be a Jordan curve and let Δ be any triangle. Then infinitely many triangles similar to Δ can be inscribed in γ. Similar results exist for Jordan curves in [4]. Interestingly, Toeplitz’s statement from 1911 that every Jordan curve admits an inscribed square is still a conjecture in the general case. Just recently, it was proved for convex or piecewise smooth curves, while extensions exist for rectangles, curves, and Klein bottles (see, e.g., [5,6]).
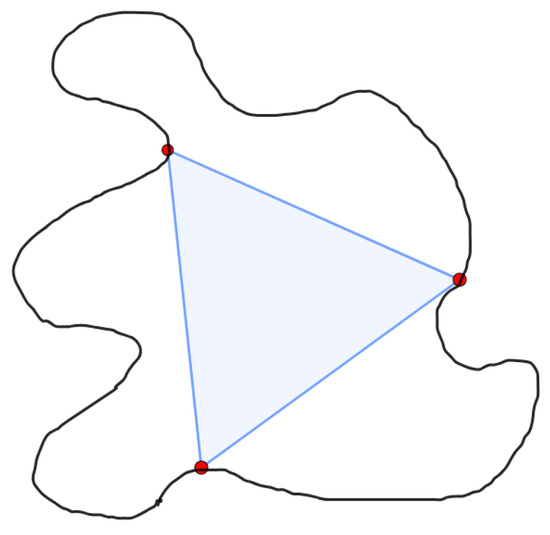
Figure 1.
Inscribed equilateral triangle in a Jordan curve.
The triangle is the simplest example of a non-smooth and piecewise linear Jordan curve; while the equilateral triangle appears to be a simple configuration, it can generate very interesting properties and applications [7]. In the sense of the above definition for polygons, an equilateral triangle inscribed in a given triangle can have two vertices on the same side, a situation that does not present much interest from the geometric point of view. This is why in the present paper we consider the case , , and , as seen in Figure 2 and Figure 3 for an acute triangle and in Figure 4 for an obtuse triangle, respectively. Similar to Nielsen’s result, there are infinitely many such triangles, generating interesting properties in the triangle geometry [8,9,10,11]. Recently, in [12], we studied the equilateral triangles inscribed in the interior of arbitrary triangles, describing them by a single parameter and examining some extremal properties (e.g., the angles for which the minimum inscribed equilateral triangles are obtained). A summary of the results obtained in [12] is presented in Section 2.
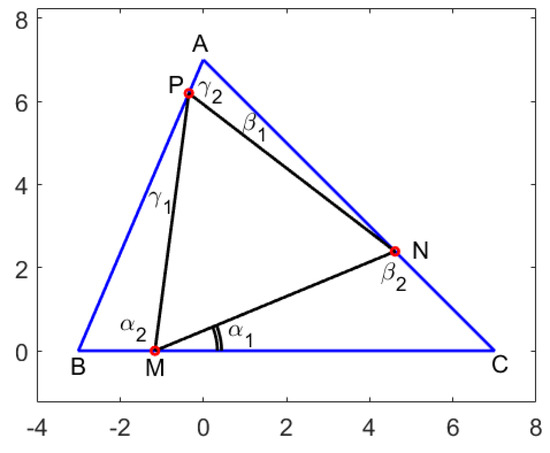
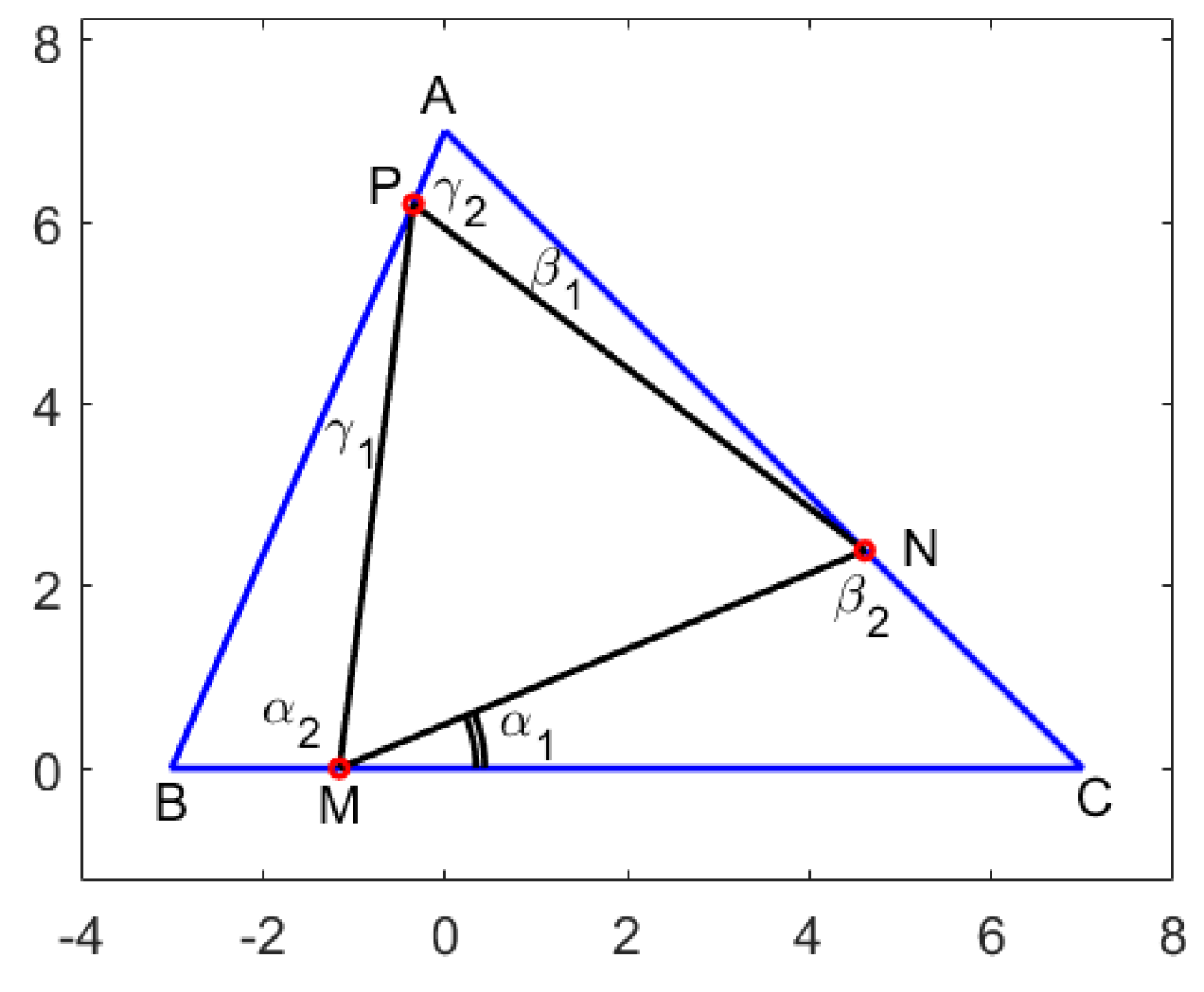
Figure 2.
Equilateral triangle inscribed in the triangle . In our example, the initial triangle has the coordinates , , , for which the angles in degrees measure , , and , while .
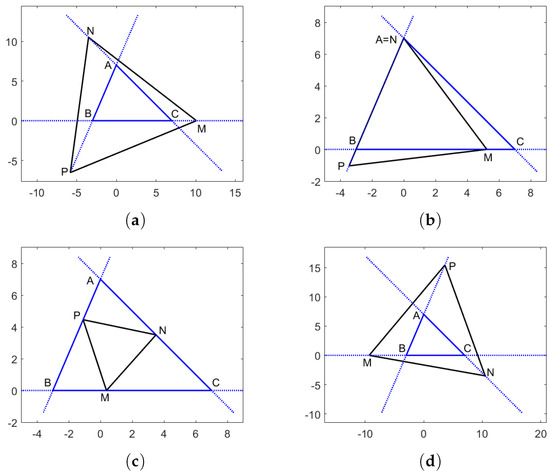
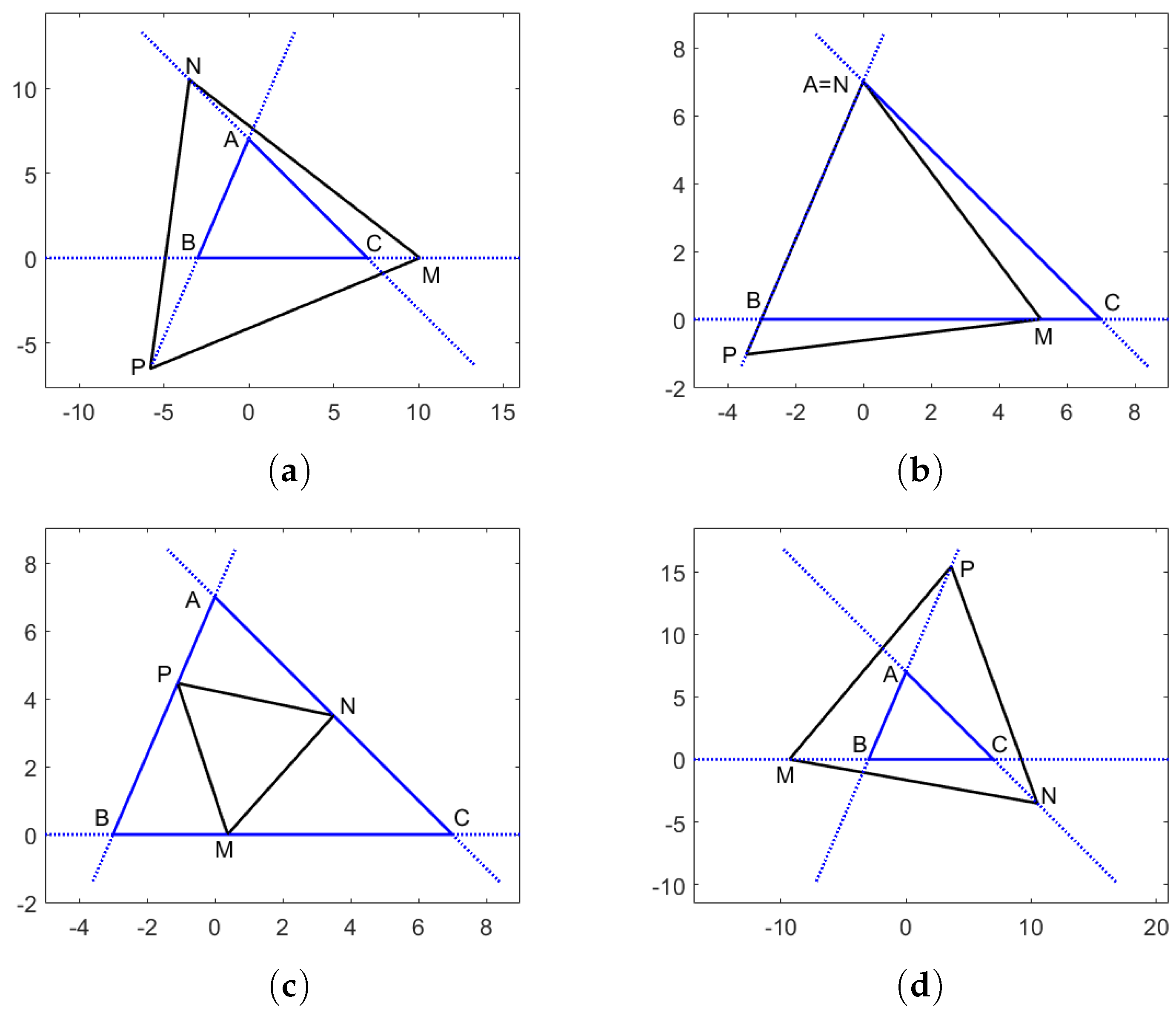
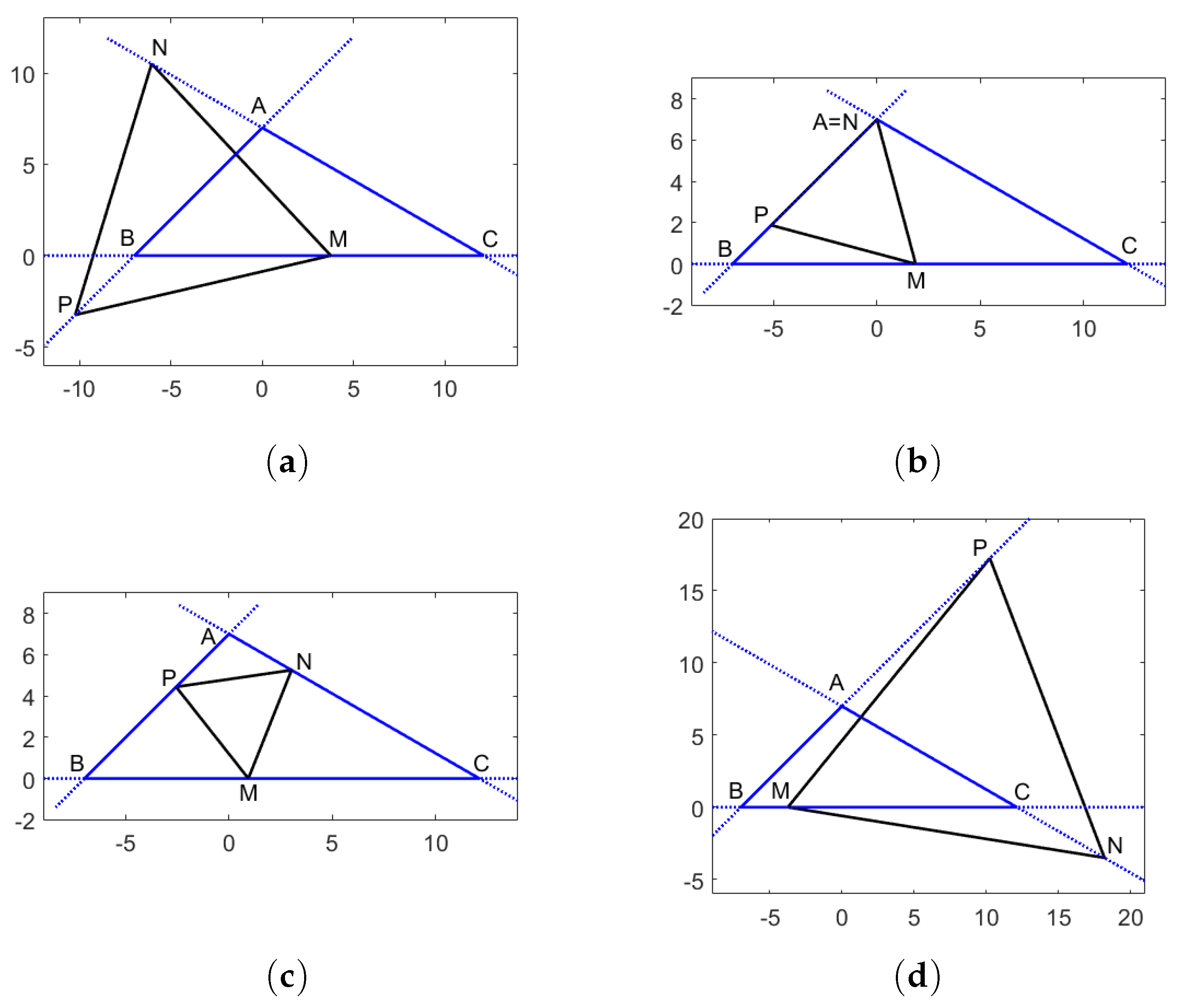
Figure 3.
Figures corresponding to equilateral triangles with vertices on the lines , , and . (a) ; (b) ; (c) ; (d) .
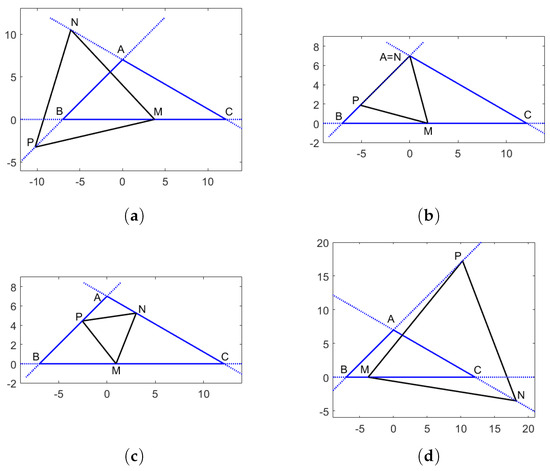
Figure 4.
Figures corresponding to equilateral triangles with vertices on the lines , , and of an obtuse triangle for (a) ; (b) ; (c) ; (d) .
In this paper, we explore the equilateral triangles whose vertices are located on the support lines of the sides of an arbitrary triangle. While this configuration does not represent a Jordan curve, this presents interesting geometric properties. We prove that the centers of these triangles are situated on two parallel lines, which are perpendicular to the Euler’s line of the original triangle.
The structure of this paper is as follows. In Section 2, we review some results obtained in [12], devoted to exact formulas for the lengths of the sides of inscribed equilateral triangles as a function of a unique parameter and to extremal properties of the side length. In Section 3, we obtain the complex coordinates of the centroids of the equilateral triangles having vertices on the support lines of a given triangle. The main result concerning the locus of these centroids is presented in Section 4. Furthermore, in Section 5 we prove that the locus of centroids consists of two parallel lines perpendicular to the Euler’s line of the original triangle. Alternative derivations and particular cases are provided in Section 6, while conclusions are formulated in Section 7.
The adoption of complex coordinates instead of Cartesian coordinates considerably simplifies the computations.
2. Inscribed Equilateral Triangles
The particular case when the inscribed equilateral triangle is nested, i.e., , , and , was studied in [12] by a trigonometric approach. Related investigations by other means can be consulted in [8,10,11,13].
Let be a triangle in the Euclidean plane, and denote by A, B, and C the measures of the angles from vertices A, B, and C, respectively. Without loss of generality, one may assume that ; therefore, . In the notation of Figure 2, one obtains the system
The system can be written in matrix form as
By simple calculation, one can show that the system (2) is compatible and it has infinitely many solutions. Moreover, since the rank of the matrix is 5, the solutions are fully determined by a single variable chosen as the parameter. From the first three equations, one can substitute , , and into the last three and obtain the reduced system
which can be written in matrix form as
Fixing the parameter , the system (3) has the solution
From the conditions one obtains . The geometric constraints illustrated in Figure 2
show that there are infinitely many possible configurations.
In our recent paper [12], we obtained the following explicit formula for the side length of the inscribed equilateral triangle as a function of the parameter :
where R is the circumradius of triangle . Denote as the area of triangle , and from the relation and the Law of Sines, one obtains
Furthermore, we showed in [12] that the minimal triangle is obtained for
Numerous illustrative examples are also provided in [12].
3. Coordinates of the Centroids of the Triangle MNP
The complex coordinates of the vertices of are denoted by m, n, and p. As seen in Figure 3 for an acute triangle and in Figure 4 for an obtuse triangle, such triangles can be constructed starting from the points N on and P on the side , with the condition that the third point M on is obtained by a rotation of angle , which in complex numbers can be performed by multiplying with (see, for example, [14]):
Clearly, if and , there exist the scalars and such that
In this notation, note that, as seen in Figure 3, we have
- If , then ;
- If , then ;
- If , then (the case presented in Section 2);
- If , then ;
- If , then .
Then, the point M of the equilateral triangle is obtained by rotating segment around point N through an angle of , clockwise or anticlockwise.
3.1. First Orientation of Triangle MNP: Anticlockwise Rotation
For anticlockwise rotation, we obtain the complex coordinate
where we use the relation . Since , one must have , hence . From here it follows that
This condition can be written as
which reduces to
where x, y, and z are given by
3.2. Second Orientation of Triangle MNP: Clockwise Rotation
An alternative configuration is obtained when the rotation of P around N is taken with an angle of clockwise. Similar to Section 3.1, we obtain
where we use the fact that . Imposing the condition , for , the coordinates of the vertices of can be written explicitly
The coefficients are related through the formula
where , , and are obtained from
These formulas allow a convenient calculation for the coordinates of the centroids.
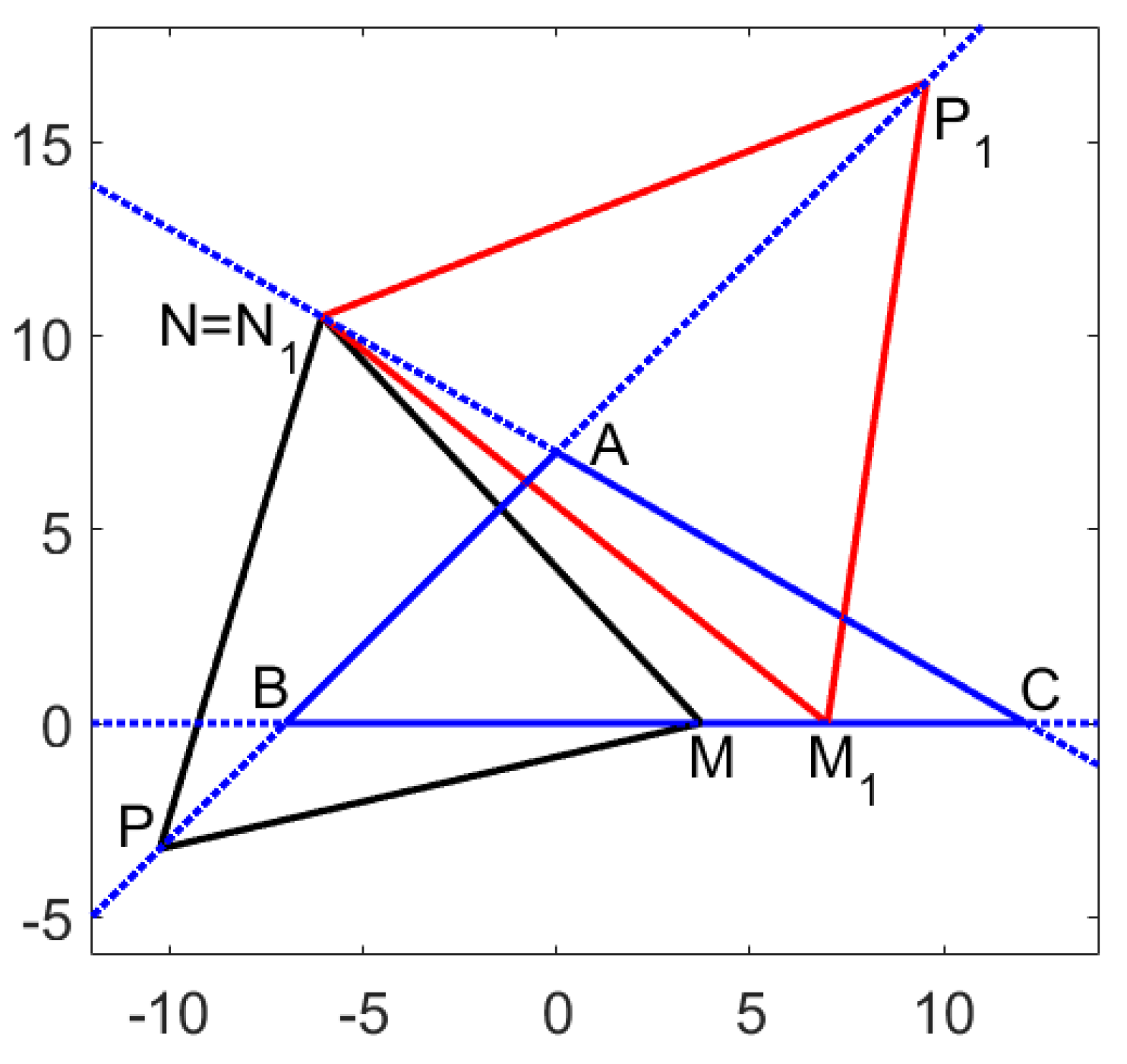
For a given point , the possible equilateral triangles are shown in Figure 5.
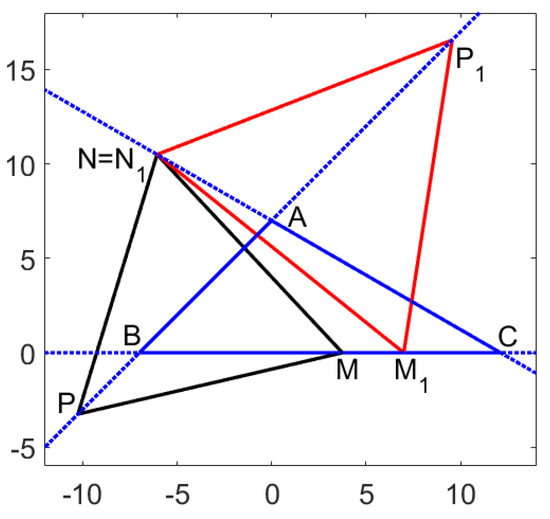
Figure 5.
Inscribed equilateral triangles with distinct orientations.
4. The Collinearity of the Centroids of Triangle MNP
In this section, we show that for each orientation of the triangles (clockwise and anticlockwise), the corresponding centroids are collinear.
4.1. The First Line of Centroids
As a function of , the coordinate of the centroid of triangle is given by
where we use (7) for k and l. By this formula, it follows that the centroids of the equilateral triangles situated on the support lines , , and , are collinear, as depicted in Figure 6 and Figure 7, for a specified range of values .
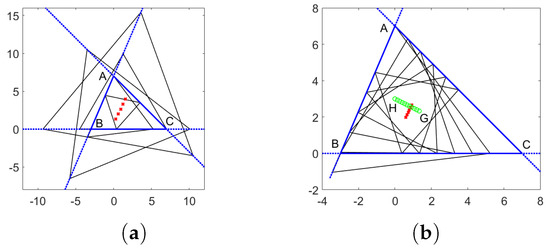
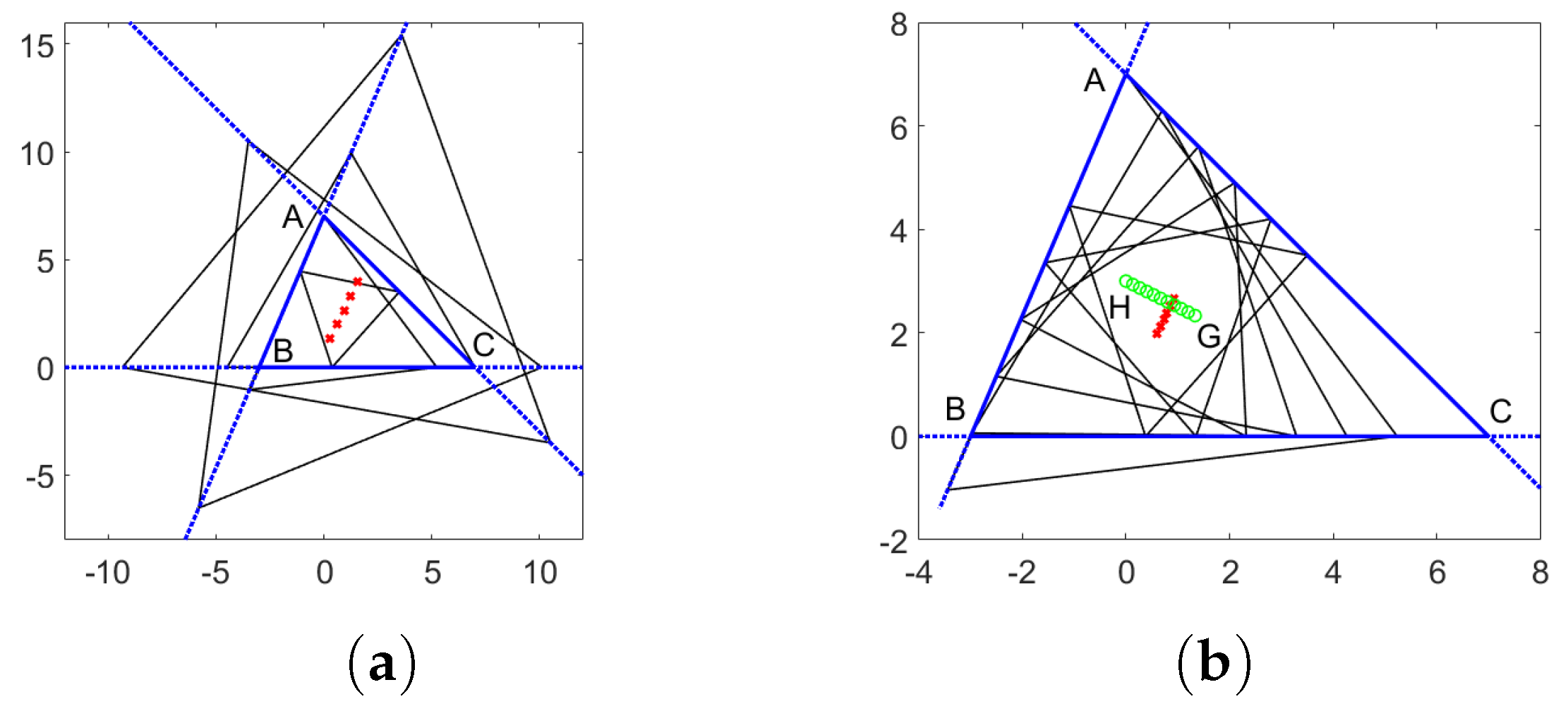
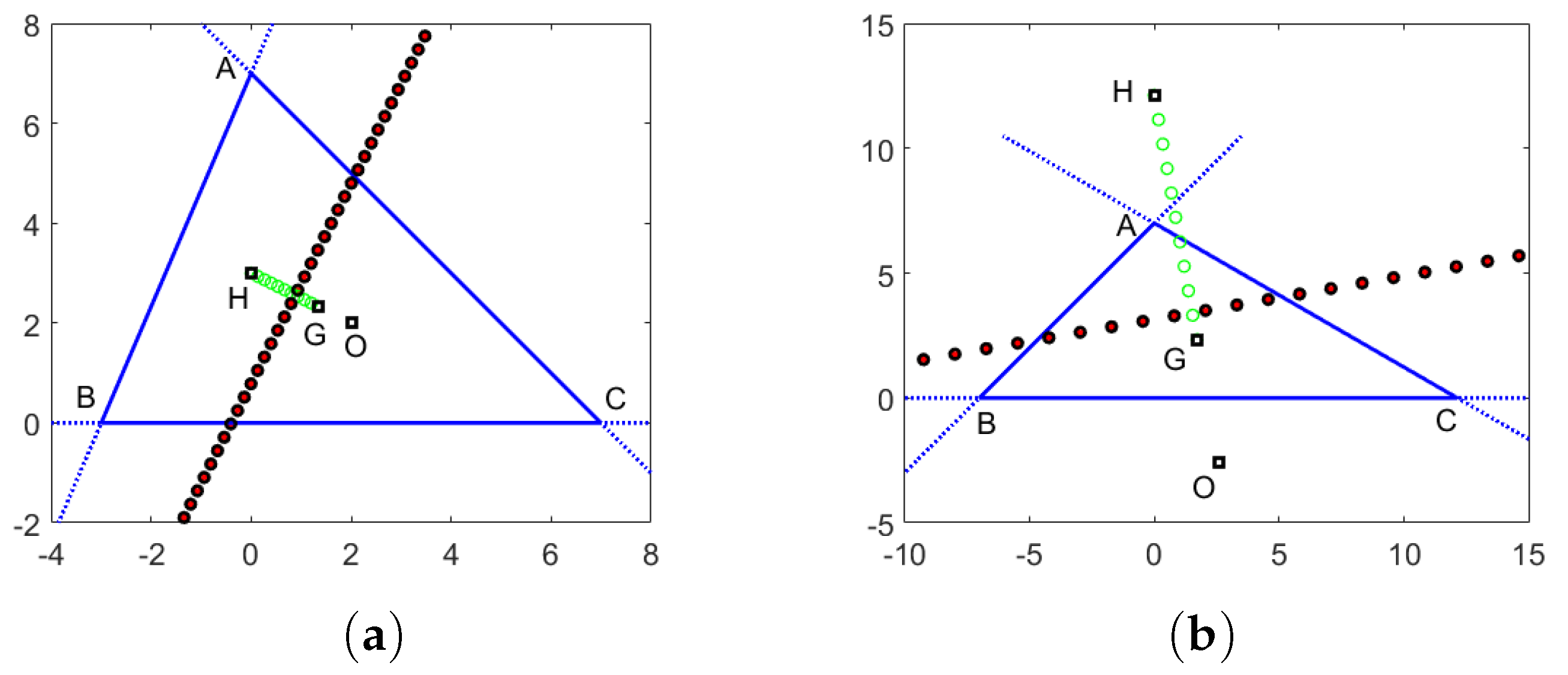
Figure 6.
Equilateral triangles with the vertices on the lines , , and , with centroids represented by red “x” symbols. (a) = −0.5, 0, 0.5, 1, 1.5; (b) = 0, 0.1, 0.2, 0.3, 0.4, 0.5. Also plotted are the centroid G and orthocenter H of .
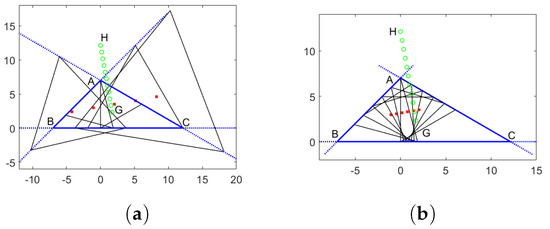
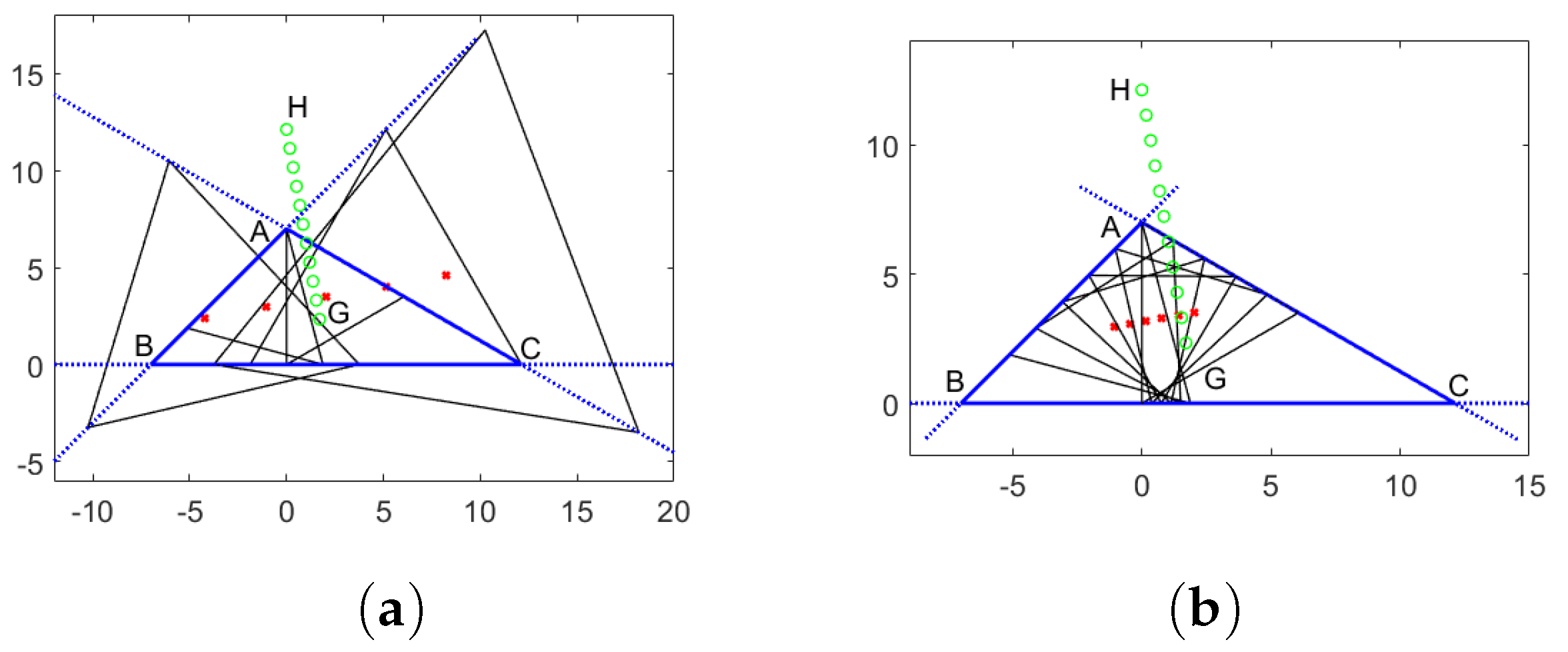
Figure 7.
Equilateral triangles with the vertices on the lines , , and , with centroids represented by red “x” symbols. (a) 0.5, 0, 0.5, 1, 1.5; (b) 0, 0.1, 0.2, 0.3, 0.4, 0.5. Also plotted are the centroid G and orthocenter H of .
4.2. The Second Line of Centroids
5. Perpendicularity and Intersection with Euler’s Line
The following auxiliary result is useful in proving the main results of this section.
Lemma 1.
Let , , , and be complex numbers and consider the lines and given in parametric form by , and , , respectively. The following properties hold:
- (1)
- If , then and are perpendicular.
- (2)
- If , then and intersect at the point
Proof.
Let us consider the points and on and the points and on . The lines are perpendicular if and only if
which reduces to . Therefore,
from where the conclusion follows.
If the point of coordinate Z is located on both lines, it means that there exist real numbers t and s such that . By conjugation, one obtains , from where we can solve for t and s the system
A special case is when passes through the origin.
Recall that in every triangle , the circumcenter O, the centroid G, and the orthocenter H are collinear on the Euler line of the triangle. Without loss of generality, we can choose the circumcenter O of as the origin of the complex plane. Under this assumption, we obtain the coordinates , , and ; hence, Euler’s line is defined by the formula , . Furthermore, the circumradius of the triangle can be set to 1, in which case we have , or
5.1. The First Line of Centroids
For the first centroid line, by substituting, we obtain
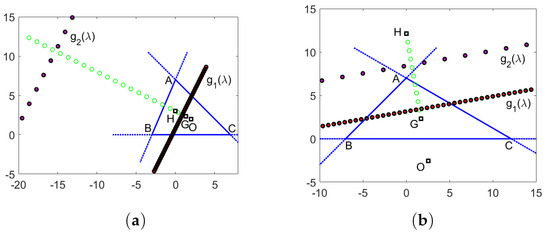
Therefore, the first line of centroids depicted in Figure 8 has the equation
while Euler’s line is given by
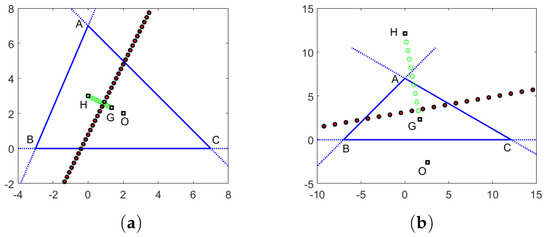
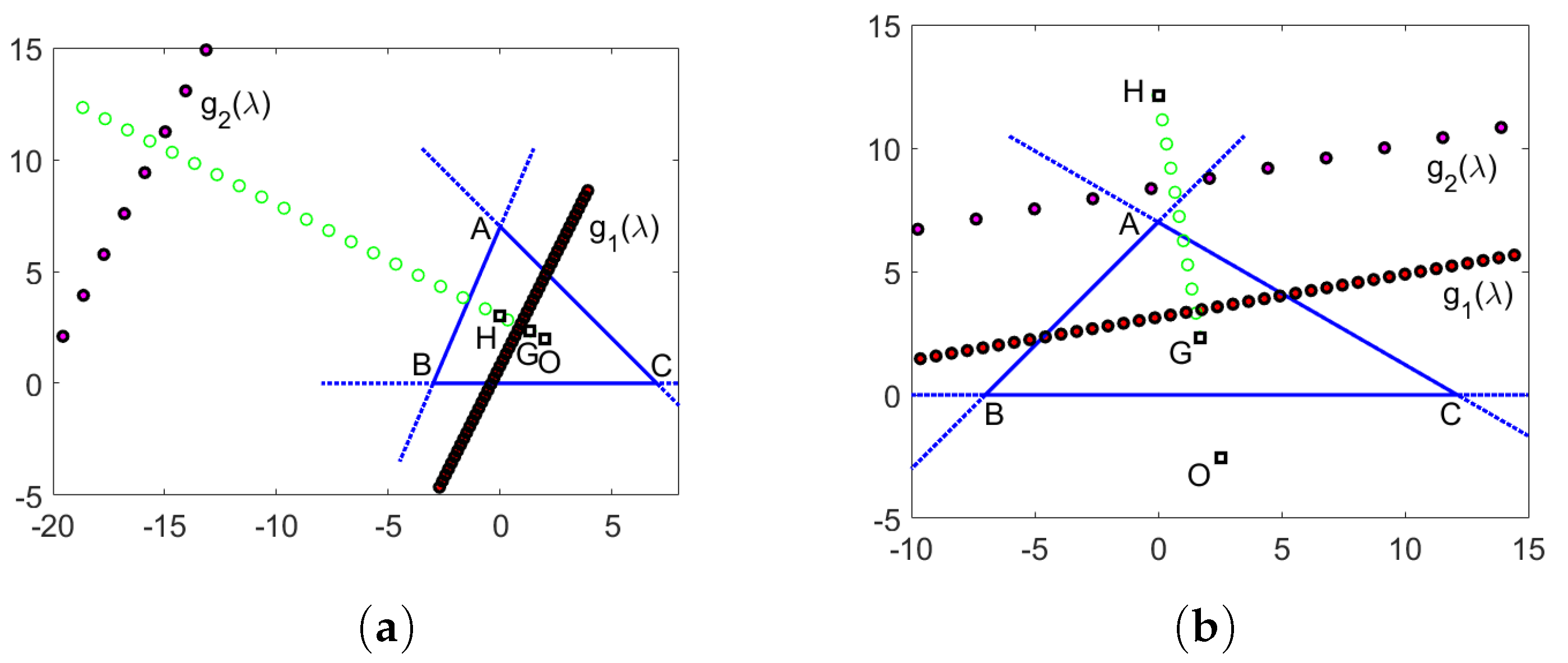
Figure 8.
First line of centroids given by (14), represented by red “x” symbols. (a) Acute triangle; (b) obtuse triangle. Also plotted are the centroid G, orthocenter H, and centre O of .
By Formulas (20) and (21) for the line of centroids and Euler’s line, we obtain
where is given by (19). First, notice that
By Lemma 1, we obtain the following result.
Theorem 1.
The first line of centroids is perpendicular to Euler’s line.
The intersection point between the line , and Euler’s line is
where denotes the real part of the complex number z.
5.2. The Second Line of Centroids
The second line of centroids has the equation
where the coefficients are
where is given by (27). Again, one may notice that
so by Lemma 1, the perpendicularity follows from the relation
The two parallel lines of centroids and are shown in Figure 9.
The coordinates of this intersection point are given by
We have an analogous result to Theorem 1, for the second line of centroids.
Theorem 2.
The second line of centroids is perpendicular to Euler’s line.
The intersection point between the line , and Euler’s line is
6. Alternative Approaches and Particular Examples
This section presents alternative proofs of the results.
6.1. Perpendicularity to Euler’s Line
For a direct proof of the result in Theorem 1 , without using Lemma 1, it suffices to show that for we obtain
Indeed, by formula (14), one obtains
Furthermore, one can write
where for , we use the identities
Clearly, this shows that
which is purely imaginary since
This ends the proof. A proof based on trilinear coordinates was provided in [8].
Similarly, one can prove the result for the second line of centroids.
6.2. Intersection Points
From the condition (i.e., ), we obtain
This condition reduces to
which gives (using that )
or
By substituting in (20) and dividing by , one obtains
from where we deduce the following result.
Theorem 3.
The intersection point between the first line of centroids , and Euler’s line of has the complex coordinates
Similarly, one can prove the coordinate of the intersection between the second line of centroids , and Euler’s line of as
6.3. Particular Examples and Formulas
In this section, we derive some particular formulas for the lines of centroids and their intersection with Euler’s line obtained for . From (14), we obtain
where by (9) and using , the values k and l are given by
We notice that these parametrizations are different from those in Section 5.
7. Conclusions
In this paper, we studied the equilateral triangles whose vertices are located on the support lines of a given arbitrary triangle. Using complex coordinates and a parametrization, we proved that the centers of these triangles are located on two lines, which are perpendicular to the Euler’s line of the given triangle, and we also computed the coordinates of these intersections.
It is interesting to investigate geometric properties related to triangles similar to a prototype whose vertices are located on the support lines of a given triangle.
Author Contributions
Conceptualization, D.A. and O.B.; methodology, D.A. and O.B.; software, O.B.; validation, D.A. and O.B.; formal analysis, D.A. and O.B.; investigation, D.A. and O.B.; resources, D.A. and O.B.; data curation, O.B.; writing—original draft preparation, D.A. and O.B.; writing—review and editing, D.A. and O.B.; project administration, D.A. and O.B. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Data Availability Statement
The work did not report any data, apart from the Matlab plots.
Acknowledgments
The authors are grateful to the anonymous referees, whose comments and suggestions helped to improve this work.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Apró, J. Triangles and Quadrilaterals Inscribed in Jordan Curves. Ph.D. Thesis, Eötvös Loránd University, Budapest, Hungary, 2023. [Google Scholar]
- Meyerson, M.D. Equilateral triangles and continuous curves. Fund. Math. 1980, 110, 1–9. [Google Scholar] [CrossRef]
- Nielsen, M.J. Triangles inscribed in simple closed curves. Geom. Dedicata 1992, 43, 291–297. [Google Scholar] [CrossRef]
- Gupta, A.; Rubinstein-Salzedo, S. Inscribed triangles of Jordan curves in . arXiv 2021, arXiv:2102.03953v1. [Google Scholar]
- Schwartz, R.E. Rectangles, curves, and Klein bottles. Bull. Amer. Math. Soc. 2022, 59, 1–17. [Google Scholar] [CrossRef]
- Stromquist, W. Inscribed squares and square-like quadrilaterals in closed curves. Mathematika 1989, 36, 187–197. [Google Scholar] [CrossRef]
- McCartin, B.J. Mysteries of the Equilateral Triangle; Hikari Ltd.: Rousse, Bulgaria, 2010. [Google Scholar]
- Capitán, F.J.G. Locus of centroids of similar inscribed triangles. Forum Geom. 2016, 16, 257–267. [Google Scholar]
- Kiss, N.S. Equal area triangles inscribed in a triangle. Int. J. Geom. 2016, 5, 19–30. [Google Scholar]
- Russell, R.A. Inscribed Equilateral Triangles. J. Classic Geom. 2015, 4, 1–6. [Google Scholar]
- Yaglom, I.M. Geometric Transformations II; Random House: London, UK, 1968; Translated from Russian. [Google Scholar]
- Andrica, D.; Bagdasar, O.; Marinescu, D.-Ş. Inscribed equilateral triangles in general triangles. Int. J. Geom. 2024, 13, 113–124. [Google Scholar]
- Čerin, Z. Configurations of inscribed equilateral triangles. J Geom. 2007, 87, 14–30. [Google Scholar] [CrossRef]
- Andreescu, T.; Andrica, D. Complex Numbers from A to …Z, 2nd ed.; Birkhäuser: Boston, MA, USA, 2014. [Google Scholar]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).