Abstract
The objective of this research is to present a novel approach to enhance the extragradient algorithm’s efficiency for finding an element within a set of fixed points of nonexpansive mapping and the set of solutions for equilibrium problems. Specifically, we focus on applications involving a pseudomonotone, Lipschitz-type continuous bifunction. Our main contribution lies in establishing a strong convergence theorem for this method, without relying on the assumption of . Moreover, the main theorem can be applied to effectively solve the combination of variational inequality problem (CVIP). In support of our main result, numerical examples are also presented.
Keywords:
equilibrium problem; extragradient method; Lipschitz-type continuous; pseudomonotone; fixed point; nonexpansive mappings MSC:
47H09; 47H10; 90C33
1. Introduction
Throughout this paper, we consider C as a non-empty, closed, and convex subset of a real Hilbert space H, equipped with the norm and the inner product Let be a bifunction. The equilibrium problem involves finding a point such that for all The set of solutions to is denoted by .
The equilibrium problem encompasses and extends several mathematical concepts, including variational inequalities, Nash equilibrium, optimization problems, and fixed-point problems (see [1,2,3]).
To solve the equilibrium problem, many authors have assumed that the bifunction satisfies the following conditions:
- (M1)
- ;
- (M2)
- is monotone, meaning ;
- (M3)
- For every
- (M4)
- For every is lower semicontinuous and convex.
See, for example, [4,5,6].
For a specific case of equilibrium problem, if for all where , then the equilibrium problem transforms into the following variational inequality :
Variational inequality, recognized as a powerful and significant tool, has been extensively studied in economics, physics, and numerous other fields in both applied sciences and pure, as noted in [7,8,9,10].
In 2010, Peng [11] introduced an iterative scheme for finding a common element between the sets arising from equilibrium problems and the set of fixed points in a real Hilbert space. The generated sequences , and are defined by
Under certain conditions, the author demonstrated that the sequences , and converge strongly to , where . Numerous studies have proposed iterative algorithms to find a common element in the solution sets of and within a real Hilbert space. These algorithms are designed to address a regularized equilibrium problem involving a monotone and Lipschitz-type continuous bifunction on C.
Later, Pham Ngoc Anh introduced a novel iterative approach [12] to identify a common element of the fixed-point set of nonexpansive mappings, where the solution set of equilibrium problems is sought using a method that handled pseudomonotone, Lipschitz-type continuous bifunctions. This approach is distinguished by solving a strongly convex optimization problem at each iteration, unlike methods for regularized equilibrium problems. The iterative process is defined as follows:
where for all this method rediscovered the extragradient-type approach proposed by Zeng and Yao [13] for finding a common element in the sets of equilibrium problems and fixed-point problems. During each primary iteration, the method only addressed strongly convex problems on C, but the convergence proof still relied on the assumption that .
In 2022, Kanikar Muangchoo [14] introduced a self-adaptive subgradient extragradient algorithm that employs a monotone step size rule for solving equilibrium problems. The iterative process is defined by
where , and She also proved that the generated sequence is strongly convergent by using the assumption that . Many researchers have also proved this with the assumption (see [12,13,14]).
Question: Can we use the extragradient method for the proof of convergence without the assumption
This paper presents a novel approach to the extragradient algorithm. The proposed method aims to find a common element between the set of fixed points of nonexpansive mappings and the solution set of equilibrium problems, specifically for a pseudomonotone, Lipschitz-type continuous bifunction. The iterative sequence is formulated as follows:
where for all and
The paper is organized as follows: Section 2 provides essential definitions and lemmas needed for the subsequent sections. Section 3 introduces a new extragradient algorithm and proves a strong convergence theorem without relying on the common assumption . In Section 4, we utilize the findings from Section 3 to address the combination of variational inequality problems (CVIPs). Finally, Section 5 presents numerical examples to illustrate the effectiveness of our approach.
2. Preliminaries
We now provide some definitions and lemmas that are used in the subsequent sections.
The normal cone to C at a point denoted by , is defined as
Let be a proper function. For , the subdifferential of at as the subset of H is given by
where . If , then the function is said to be subdifferentiable at If the subdifferentiable is a singleton, then is termed differentiable at , which is represented by .
Definition 1.
The mapping is called nonexpansive if
Definition 2.
A bifunction is defined as follows:
- (i)
- monotone on C if
- (ii)
- pseudomonotone on C if
- (iii)
- Lipschitz-type continuous on C if there exist positive constants and such that
Lemma 1
([15]). Let be a function that is both convex and possesses a subdifferential at every point. The function ρ reaches its minimum value at if and only if
Lemma 2
([16]). Suppose we have a sequence of real numbers, with a subsequence such that Consequently, a non-decreasing sequence can be constructed such that as , satisfying
- (i)
- ;
- (ii)
- .
Specifically, .
Lemma 3
([17]). Let M be a mapping on C that does not expand distances. If the fixed-point set is non-empty, then is closed at zero in the weak topology. That is, if a sequence converges weakly to some and converges strongly to zero, we can infer that . Therefore, M functions as the identity operator on
Lemma 4
([12]). Assume the following conditions are met for the bifunction :
- (i)
- ρ is pseudomonotone over C;
- (ii)
- ρ exhibits Lipschitz-type continuity on C;
- (iii)
- for every , the bifunction is convex and possesses a subdifferential.
The solution set and the fixed-point set intersect nontrivially and are closed.
Let be a nonexpansive mapping. Define sequences , and starting from as follows:
with the sequences and adhering to:
- (i)
- for some ;
- (ii)
- ;
- (iii)
- .
Given , the following inequality holds:
Lemma 5
([18]). Consider a sequence of non-negative real numbers satisfying
where is a sequence within the interval and is such that
, and
Then,
To prove our main result, we need to first establish the following lemma.
Lemma 6.
For each , let be a pseudomonotone mapping with Then,
where for all and
It is straightforward to show that . Next, we claim that To show this, let . Then, we have
Hence, is a minimizer of
From (1) and Lemma 1, we have
There exists and such that
So, we obtain
Since , we have
for all Then,
Therefore,
From (2) and lying within the interval for all k ranging from 1 to , we obtain
Then,
Thus,
Hence,
3. Main Results
Theorem 1.
For each , let be a pseudomonotone mapping that is jointly weakly continuous satisfying the following conditions:
- (i)
- is convex with respect to its second argument and lower semicontinuous on C;
- (ii)
- is Lipschitz-type continuous on C;
- (iii)
- for every the function is convex and subdifferentiable.
Let be a nonexpansive mapping with
Let the sequences , and be generated by and
where for all and for all
Assume that the conditions outlined below are satisfied:
- (i)
- For each , ;
- (ii)
- ;
- (iii)
- and . Where and are Lipschitz-type constants of ,
Then, the sequences , and converge strongly to .
Following the same method as Lemma 4, we use , and in (3) instead of , and in Lemma 4, and we obtain
From Lemma 1, we have
if and only if
According to the established formulation of there exist and such that
So, we obtain
According to the established formulation of we obtain
This suggests that
With we have
From , we obtain
Referring to Equation (6), we obtain the following result:
Similarly, since
From Lemma 1, we obtain
From (8), there exist and such that
So, we obtain
Given that , we can infer that
According to the established formulation of we have
This indicates that
From (9) and (10), we obtain
Substituting we have
From (12), it follows that
Adding (7) and (13), we obtain
Since is Lipschitz-type continuous on C, we obtain
that is,
Following this, we will demonstrate that is bounded.
Let According to the definition of and (4), we obtain
By applying induction, we achieve for all This shows that is bounded.
According to the established formulation of and (4), we have
leading to
From (15), we obtain
That is,
Following this, let us consider two cases.
Case . Assume there is an such that the sequence is non-increasing. In this scenario, the limit of the sequence exists.
As the limit of exists, from (16), condition , and by the assumptions on , and we obtain
Because the limit of exists, (17) conditions and , and by the assumptions on , and we obtain
From (14) and (19) and conditions and , we obtain
Then,
From (18)–(20), we have
As is bounded, there exists a subsequence of such that
where
Without affecting the generality of the conclusion, it can be assumed that as
Hence, (22) reduces to
By Lemma 3, Equation (21), and as we obtain
From (19) and (20) and as this leads to the conclusion that
From (11) and assumptions of for all we have
and when we have for all Thus,
From Lemmas (6) and (25), we obtain
From (24) and (26), we obtain
Using this and we obtain
Therefore, when combined with (23), we have
By (4) and we obtain
By Lemma 5 and (27), we obtain
From (19) and (20), it follows that
Therefore, the sequences , and all converge strongly to the same point .
Case . Assume there is a subsequence of {n} such that
According to Lemma 2, there exists a non-decreasing sequence within such that as
From (16) and (29), we obtain
By the assumptions on , and , we obtain
From (17) and (29), we obtain
By the assumptions on , and and conditions and we obtain
Using the same reasoning as in case , we have
Applying the same reasoning as in case , we have
It follows from (28) and (29) that
and hence,
From , (29) and (32), we obtain
Thus, we obtain
From (30) and (31), it follows that
Therefore, the sequences , and all strongly converge to the identical point ; this completes the proof.
4. Application
For every we define
where , and Then, becomes the following combination of variational inequality problem (CVIP):
Find such that This problem is introduced by [19]. We denote by the set of solutions of the CVIP.
In the following theorem, we use (34) instead of in (3) and demonstrate the theorem of strong convergence, which is applied to effectively solve the combination of variational inequality problem (CVIP).
Theorem 2.
For each , let be a pseudomonotone mapping that is jointly weakly continuous on satisfying the following conditions:
- (i)
- is convex in its second argument and lower semicontinuous on C;
- (ii)
- is Lipschitz-type continuous on C;
- (iii)
- for each the mapping is convex and subdifferentiable.
Let be a nonexpansive mapping with
Let the sequences , and be generated by and
where the sum and the sequences , and are defined as in Theorem 1 for every , and satisfy the conditions (i)–(iii) stated in Theorem 1. Then, the sequences , and converge strongly to
Applying Theorem 1, we reach the conclusion.
The standard constrained convex optimization problem is to find that minimizes the function ℑ over C:
where is a convex function that is Frchet differentiable. The set of all solutions to (35) is denoted by .
Lemma 7
Corollary 1.
For each , let be a pseudomonotone mapping that is jointly weakly continuous on satisfying the following conditions:
- (i)
- is convex in its second argument and lower semicontinuous on C;
- (ii)
- is Lipschitz-type continuous on C;
- (iii)
- for every the mapping is convex and subdifferentiable.
Let be a nonexpansive mapping with
Let the sequences , and be generated by and
where the sum and the sequences , and are defined as in Theorem 1 for every , and satisfy conditions – stated in Theorem 1. Then, the sequence , and converge strongly to
Applying Theorem 2, we arrive at the conclusion.
5. Example
In this section, we provide an example to illustrate and support our main theorem.
Example 1.
Let be the linear space whose elements are all 2-summable sequences of scalars in that is,
with and defined by
and
where .
Let . For each , define the bifunction by
Define by Let , , and We can rewrite (3) as follows:
Then, the sequences , and converge strongly to .
Solution.
It can be easily shown that T is a nonexpansive mapping and is a pseudomonotone bifunction which satisfies the Lipschitz-like condition with constant , , for all Also, f satisfies conditions – in Theorem 1. By the definition of for every we have According to Theorem 1, we can infer that the sequence strongly converges to .
In numerical analysis, Newton’s method is a mathematical technique used to approximate numerical solutions, such as zeros, x-intercepts, and roots. For a function defined over the real numbers, along with its derivative , if is an approximate solution of where then the method can be applied. In general, for , the next approximation, defined as , satisfies
starting from an initial point This method is widely regarded as one of the most used, researched, and applied techniques for generating a sequence that approximates the solution.
Newton’s method (37) is an illustration of Picard iteration, for the equation
where , with many authors employing the Picard iteration to approximate fixed points.
is a significant mathematical constant, and numerous researchers have attempted to approximate its value. To explore the convergence of Newton’s method, we use it in conjunction with our main result to approximate the value of .
Example 2.
Let be the set of all real numbers and . For an approximate value of π, define by It is straightforward to show that is a nonexpansive mapping. For every define the bifunction by
Let , and . For every let the constants , , , and We can rewrite (3) as follows:
Then, the sequences , and converge strongly to π.
Solution.

It is straightforward to see that is a pseudomonotone bifunction and satisfies a Lipschitz-like condition with constants , , for all Also, function f meets the conditions specified in Theorem 1.
By the definition of , for every we have As a result, this leads us to conclude the sequences , and converge strongly to π.
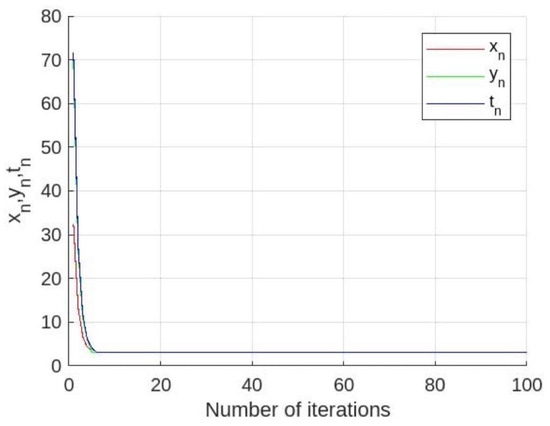
Using the algorithm described above, we obtain the numerical result for approximating the value of π, which is presented in Figure 1 and Table 1 below, where and u are obtained by randomly selecting initial values from the interval and
Figure 1.
The convergence of , and with Theorem 1.
Table 1.
The numerical results of , and of Theorem 1.
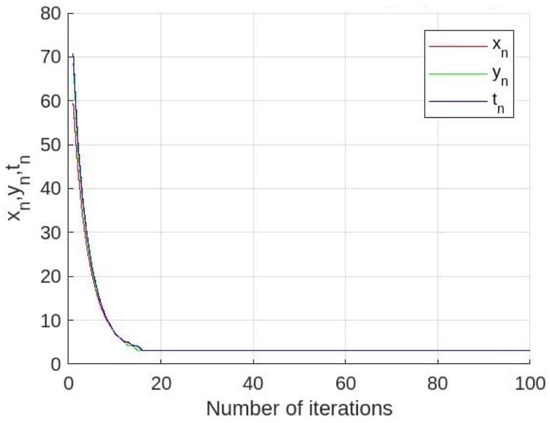
Next, we use and for algorithm 1 in [12]. Define the mapping with h the same as h in Example 2 and define the bifunction by
We derive the numerical result for approximating the value of π, which is presented in Figure 2 and Table 2 below, where is obtained by randomly selecting initial values from the interval and
Figure 2.
The convergence of , and with algorithm 1 in [12].
Table 2.
The numerical results of , and of algorithm 1 in [12].
6. Conclusions
In this work, we present a novel method for the extragradient algorithm to find a common element between the set of fixed points of nonexpansive mappings and the set of solutions to equilibrium problems for a pseudomonotone, Lipschitz-type continuous bifunction. We obtain some strong convergence theorems for the sequence generated by the proposed algorithm under suitable conditions. However, we would like to remark the following:
- (1)
- Our result is proved without the assumption (there are many researchers who have proved strong convergence theorems with this assumption; see [12,13,14]).
- (2)
- In Theorem 2, we use (34) instead of in (3) and prove the strong convergence theorem, which is applied to effectively solve the combination of variational inequality problem (CVIP).
- (3)
- In Corollary 1, we use in (36) instead of the mapping in Theorem 2, where and prove the strong convergence theorem, which is applied to the standard constrained convex optimization problem.
- (4)
- We provide Example 1 to demonstrate the efficiency and implementation of our main result in the space . The convergence of , and in Example 1 is guaranteed by Theorem 1.
- (5)
- In Example 2, we obtain a numerical result for approximating the value of , which is presented in Figure 2 and Table 2. Moreover, we obtain the numerical comparison between our algorithm and algorithm 1 in [12], showing that the sequences , and of our algorithm converge faster than the sequences , and of algorithm 1 in [12].
Author Contributions
A.K. was responsible for conceptualization, formal analysis, supervision, and writing—review and editing. A.S. handled writing the original draft, formal analysis, and writing—review and editing. All authors have read and agreed to the published version of the manuscript.
Funding
This research is a result of the project entitled “The development of search engine by using approximation method for solving fixed point problem (Year1) No. RE-KRIS/FF67/041” by King Mongkut’s Institute of Technology Ladkrabang (KMITL), which has been received funding support from the NSRF.
Data Availability Statement
The original contributions presented in the study are included in the article, further inquiries can be directed to the corresponding author.
Acknowledgments
The authors would like to express their sincere appreciation to the Research and Innovation Services at King Mongkut’s Institute of Technology Ladkrabang.
Conflicts of Interest
The authors declare that they have no conflicts of interest.
References
- Ansari, Q.H.; Al-Homidan, S.; Yao, J.C. Equilibrium Problems and Fixed Point Theory. Fixed Point Theory Appl. 2012, 2012, 25. [Google Scholar] [CrossRef][Green Version]
- Farid, M. Two algorithms for solving mixed equilibrium problems and fixed point problems in Hilbert spaces. Ann. Univ. Ferrara 2021, 67, 253–268. [Google Scholar] [CrossRef]
- Latif, A.; Eslamian, M. A New Iterative Method for Equilibrium Problems and Fixed Point Problems. Nonlin. Anal. Geom. Funct. Theory 2013, 2013, 178053. [Google Scholar] [CrossRef][Green Version]
- Cheawchan, K.; Kangtunyakarn, A. The modified split generalized equilibrium problem for quasi-nonexpansive mappings and applications. J. Inequal. Appl. 2018, 122, 1–28. [Google Scholar] [CrossRef] [PubMed]
- Suwannaut, S.; Kangtunyakarn, A. On Approximation of the Combination of Variational Inequality Problem and Equilibrium Problem for Nonlinear Mappings. Thai J. Math. 2021, 19, 1477–1498. [Google Scholar]
- Takahashi, S.; Takahashi, W. Viscosity approximation methods for equilibrium problems and fixed point problems in Hilbert space. J. Math. Anal. Appl. 2007, 331, 506–515. [Google Scholar] [CrossRef]
- Censor, Y.; Gibali, A.; Reich, S. Algorithms for the split variational inequality problem. Numer. Algorithms 2012, 59, 301–323. [Google Scholar] [CrossRef]
- Ceng, L.C.; Yao, J.C. Iterative algorithm for generalized set-valued strong nonlinear mixed variational-like inequalities. J. Opt. Theory Appl. 2005, 124, 725–738. [Google Scholar] [CrossRef]
- Sripattanet, A.; Kangtunyakarn, A. Approximation of G-variational inequality problems and fixed-point problems of G-κ-strictly pseudocontractive mappings by an intermixed method endowed with a graph. J. Inequal. Appl. 2023, 2023, 63. [Google Scholar] [CrossRef]
- Yao, Y.; Yao, J.C. On modified iterative method for nonexpansive mappings and monotone mappings. Appl. Math. Comput. 2007, 186, 1551–1558. [Google Scholar] [CrossRef]
- Peng, J.W. Iterative algorithms for mixed equilibrium problems, strict pseudocontractions and monotone mappings. J. Optim. Theory Appl. 2010, 144, 107–119. [Google Scholar] [CrossRef]
- Pham, P.N. A hybrid extragradient method extended to fixed point problems and equilibrium problems. Optimization 2013, 62, 271–283. [Google Scholar] [CrossRef]
- Zeng, L.C.; Yao, J.C. Strong convergence theorem by an extragradient method for fixed point problems and variational inequality problems. Taiwan. J. Math. 2006, 10, 1293–1303. [Google Scholar] [CrossRef]
- Muangchoo, K. A new explicit extragradient method for solving equilibrium problems with convex constraints. Nonlinear Funct. Anal. Appl. 2022, 27, 1–22. [Google Scholar] [CrossRef]
- Facchinei, F.; Pang, J.S. Finite-Dimensional Variational Inequalities and Complementary Problems; Springer: New York, NY, USA, 2003. [Google Scholar]
- Mainge, P.E. Strong convergence of projected subgradient methods for nonsmooth and nnonstrictly convex minimization. Set-Valued Anal. 2008, 16, 899–912. [Google Scholar] [CrossRef]
- Du, W.S.; He, Z. Feasible iterative algorithms for split common solution problems. J. Nonlinear Convex Anal. 2015, 16, 697–710. [Google Scholar]
- Xu, H.K. Iterative algorithm for nonlinear operators. J. Lond. Math. Soc. 2002, 2, 1–17. [Google Scholar] [CrossRef]
- Kheawborisut, A.; Kangtunyakarn, A. Modified subgradient extragradient method for system of variational inclusion problem and finite family of variational inequalities problem in real Hilbert space. J. Inequal. Appl. 2021, 2021, 53. [Google Scholar] [CrossRef]
- Su, M.; Xu, H.K. Remarks on the Gradient-Projection Algorithm. J. Nonlinear Anal. Optim. 2010, 1, 35–43. [Google Scholar]


Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).