


An Intelligent Predictive Algorithm for the Anti-Rollover Prevention of Heavy Vehicles for Off-Road Applications

 ,
,  , ,
, ,
Abstract
:1. Introduction
- The development of a non-linear three degrees-of-freedom mathematical model as simple as effective to catch the lateral load transfer dynamics even in presence of a banked road;
- The formulation of a model-based algorithm for the analytical identification of the critical rollover limits through the development of characteristic maps in the phase plane portrait, able to exhibit the influence of road local irregularities and global geometric factors, i.e., the bank angle;
- The formulation of a statistical algorithm, based on the recurrent neural network approach, for the estimation of the load transfer ratio in a realistic scenario, by considering typical measurable quantities available for an experimental implementation;
- The numerical assessment of a real-time algorithm able to predict in advance the time to reach a specific load transfer ratio considered as the incipient rollover limit.
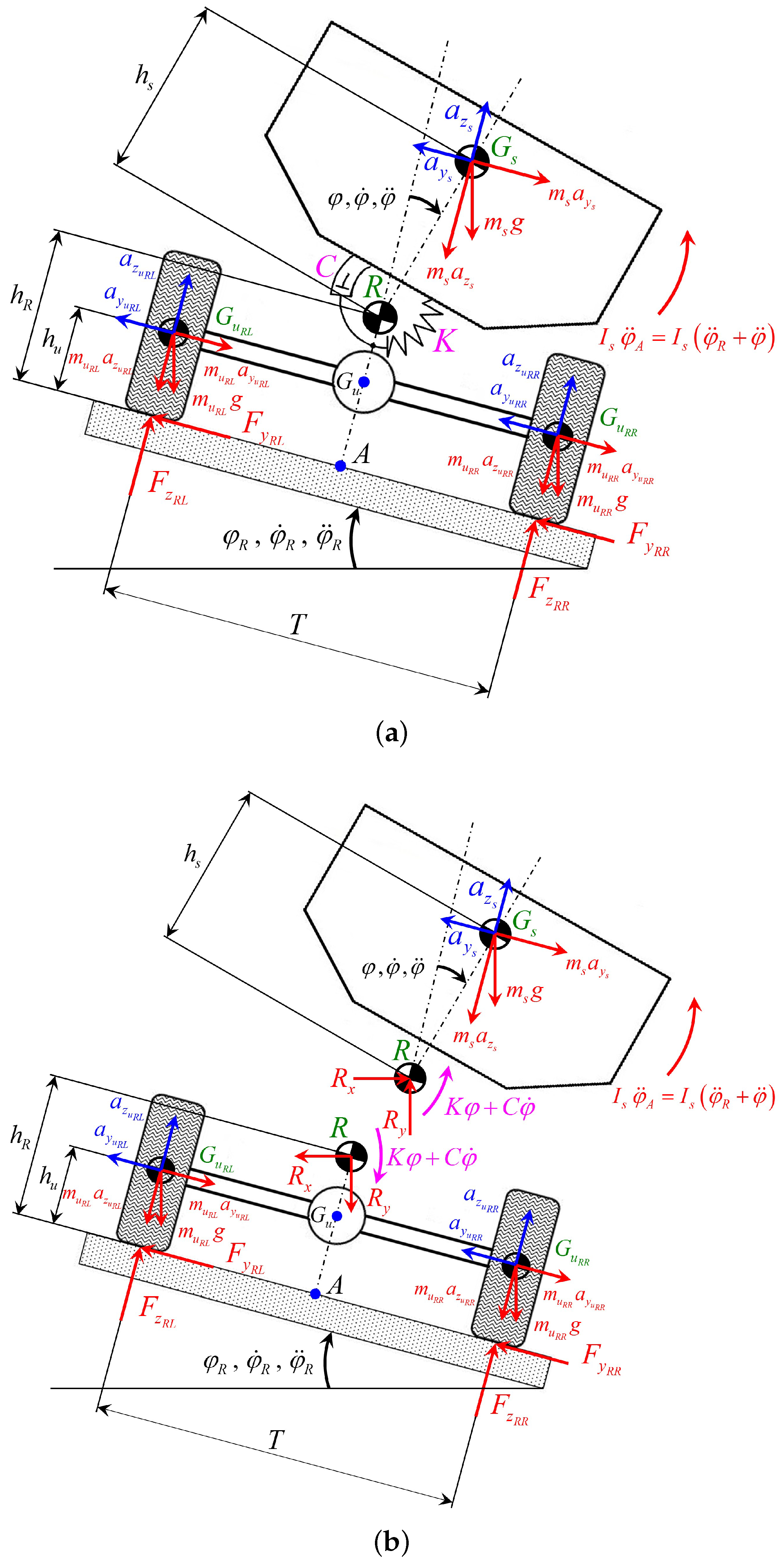
2. Vehicle Model Description
- 1.
- All the bodies below the suspension system (tires, calipers, wheels carriers, suspension rods, etc. …) are considered as a unique rigid body, connected to the sprung mass through the virtual roll axis R, and represented by four lumped masses , where , each one placed in the the Front Left (FL), Front Right (FR), Rear Left (RL) and Rear Right (RR) wheel rotational centers, respectively;
- 2.
- The roll moment of inertia of the unsprung mass is considered negligible;
- 3.
- The road bank angle is supposed to be equal for the front and the rear axles: absolute roll angle of the unsprung mass is ;
- 4.
- The front and rear suspensions are represented as an equivalent torsional spring and damper system.
3. Load Transfer Ratio Estimation
3.1. Model-Based Estimation
- (a)
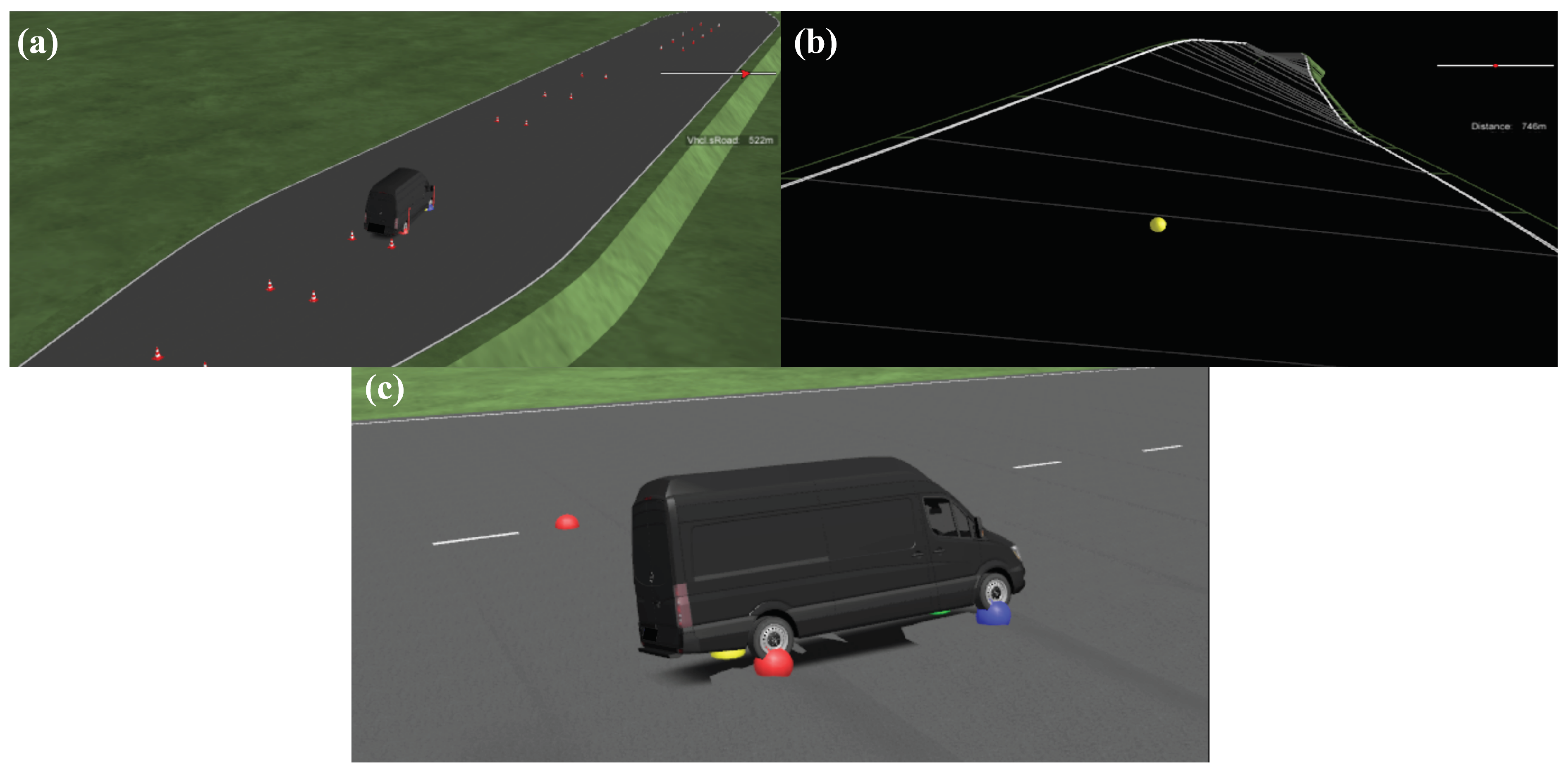
- A double lane change manouvre (ISO 3888-1) on a flat road at an initial vehicle speed of ;
- (b)
- A straight manoeuvre on a banked road, whose bank angle is smoothly increased from to , at constant vehicle speed ();
- (c)
- A straight manoeuvre on a road with a flat surface under the left vehicle side and an asymmetrical sinusoidal profile (wavelength equal to the vehicle wheelbase and height amplitude of ) under the right vehicle side, called asymmetrical waves road in the rest of the paper.
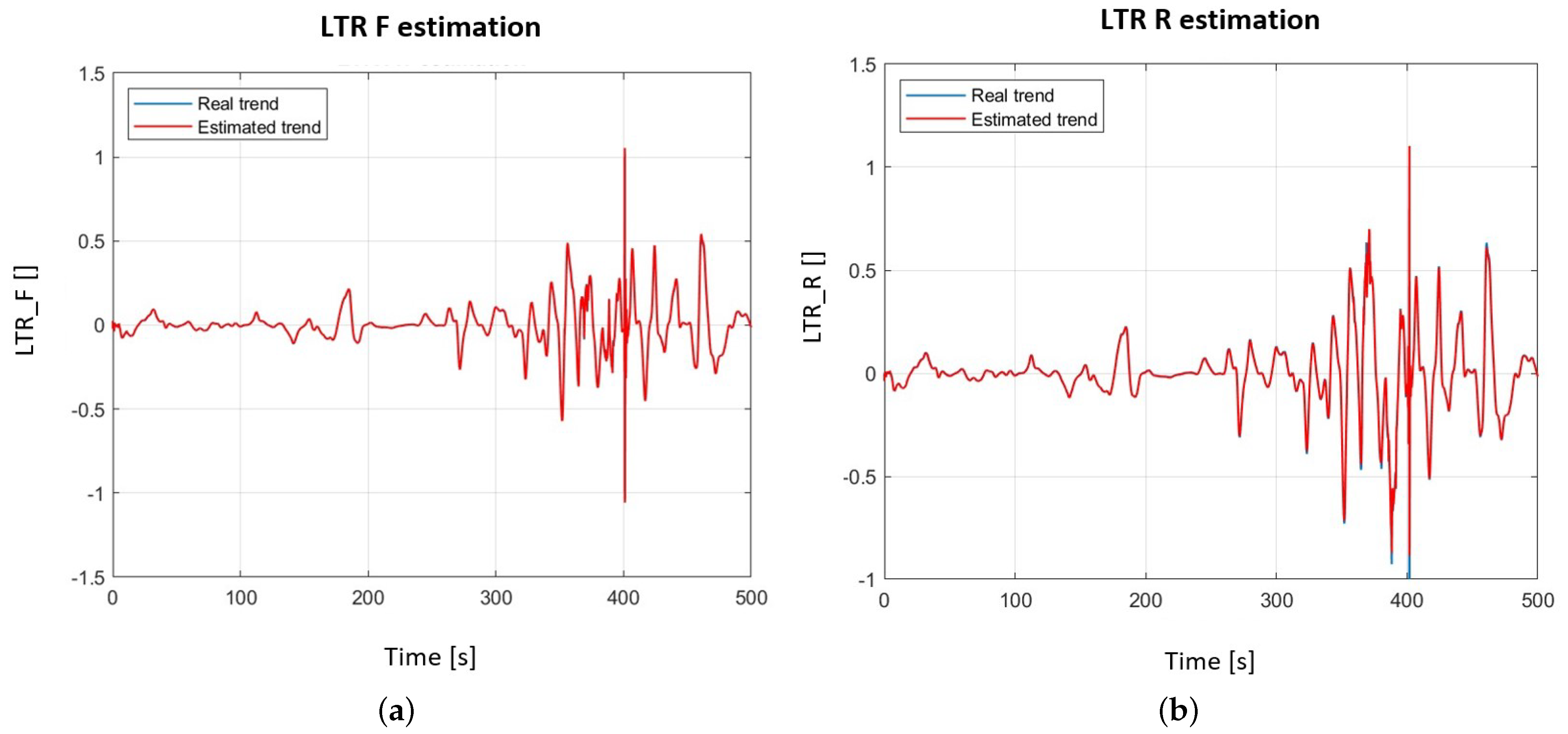
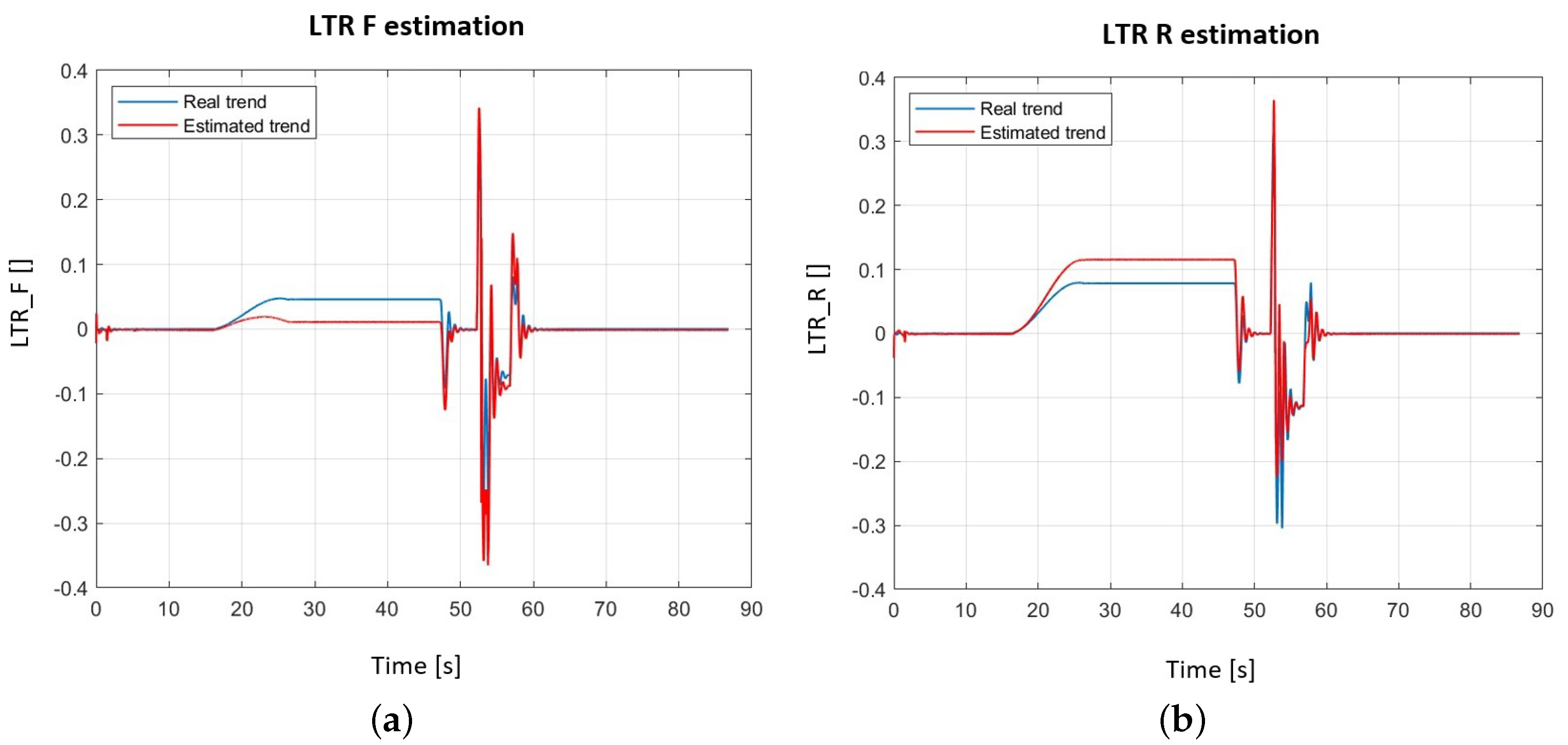
3.2. Recurrent Neural Network Estimation
- the RNN algorithm can be developed and tested with a considerable amount of simulated driving scenarios, without requiring an extensive experimental campaign, thus reducing time and costs;
- If the vehicle dynamic behavior is well described by the mathematical model, the neural network designed with a simulated data can be directly deployed on an experimental setup with a lower time and cost effort.
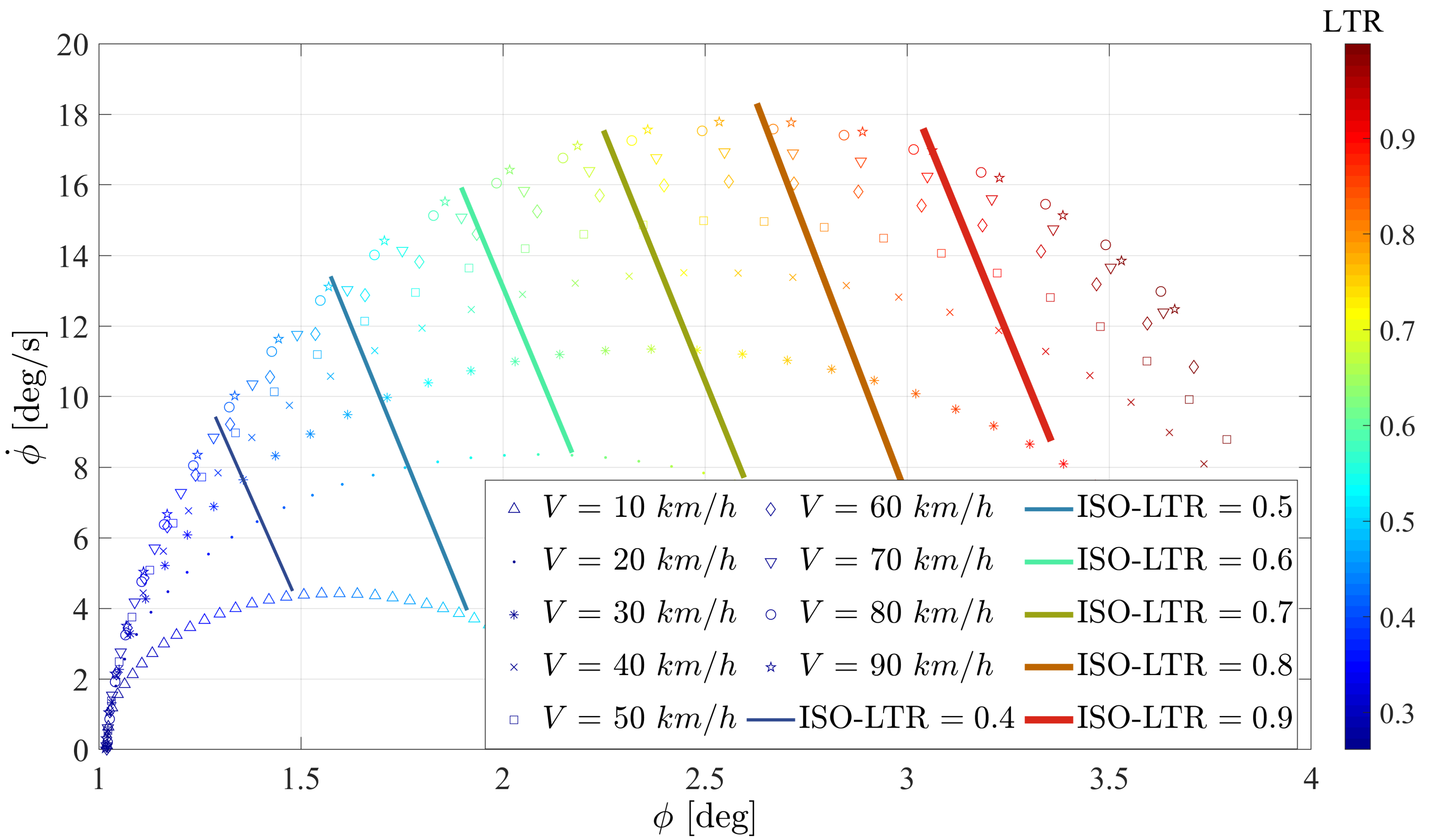
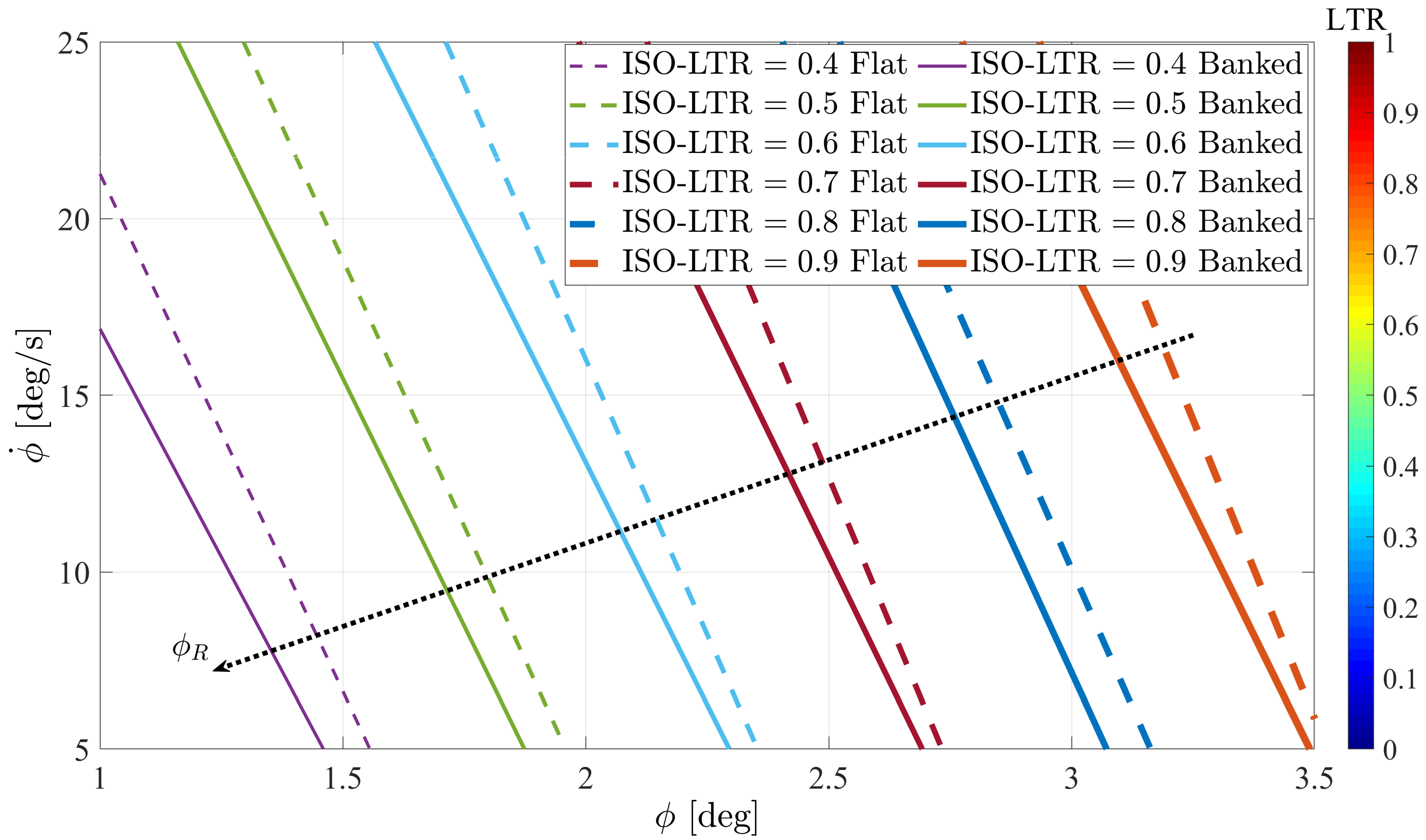
4. ISO-LTR Phase Plane Portrait
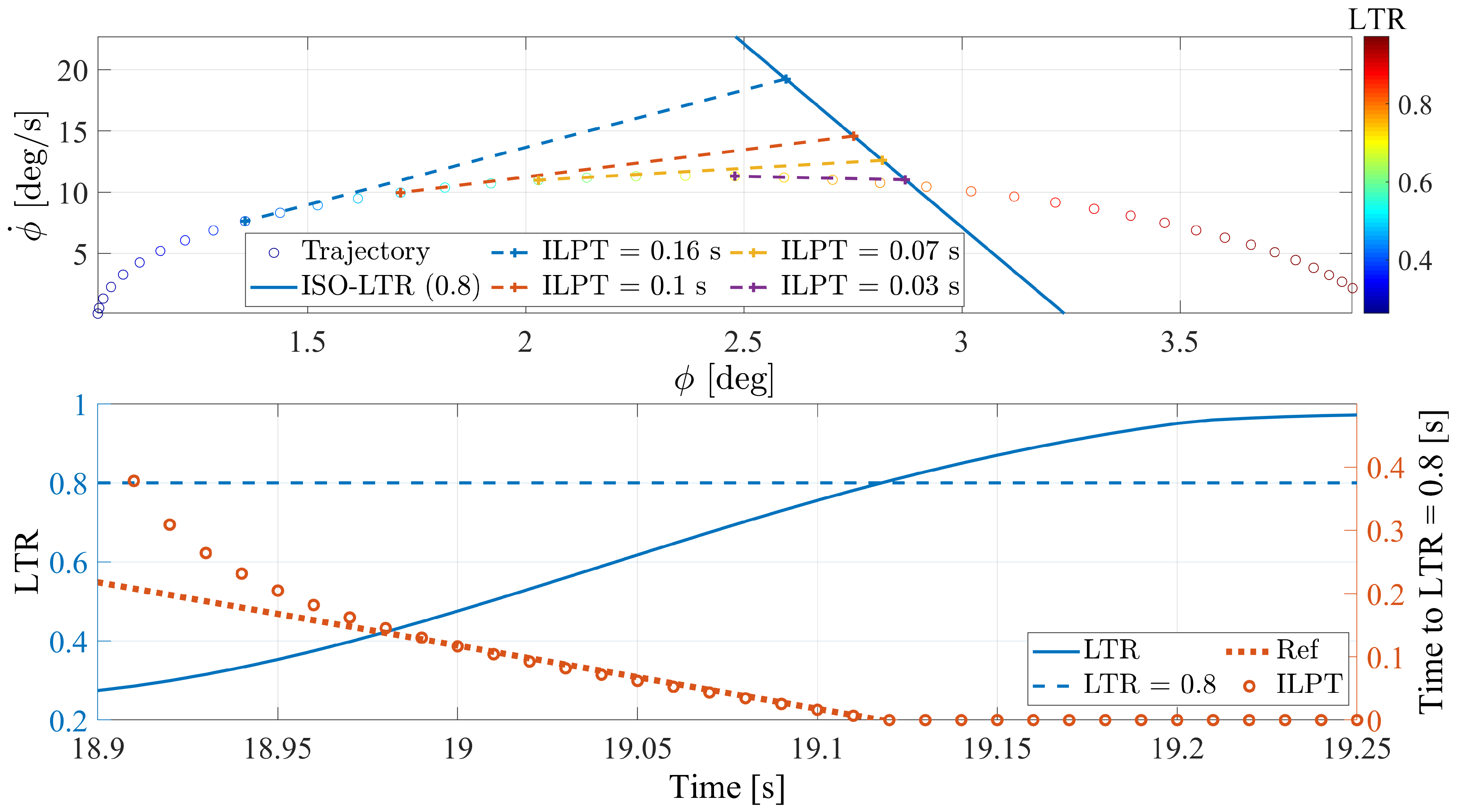
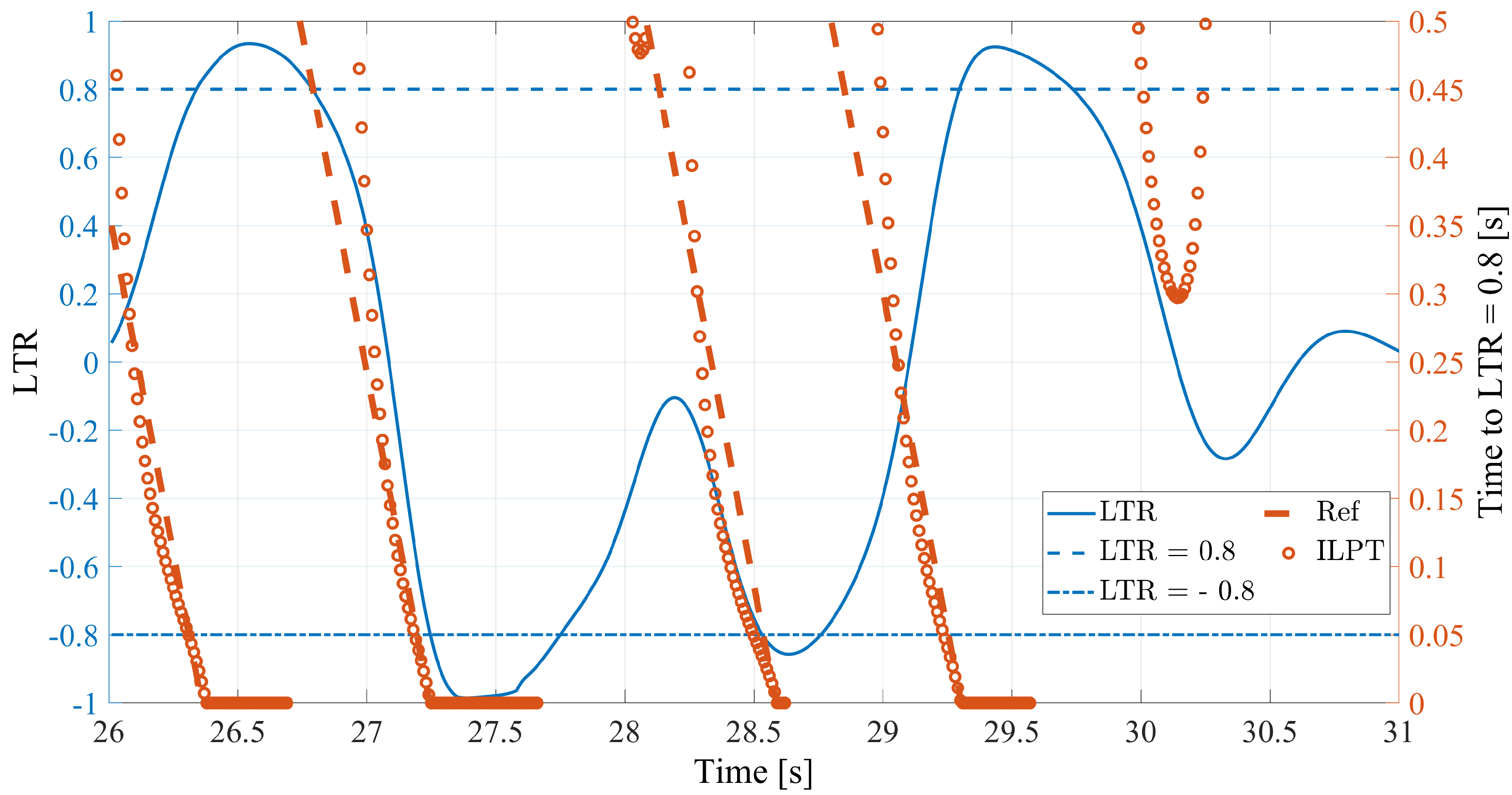
5. ISO-LTR Predictive Time
6. Simulation Results
- A fast ramp steering on a banked road;
- A double lane change on a flat Road (ISO 3888-1).
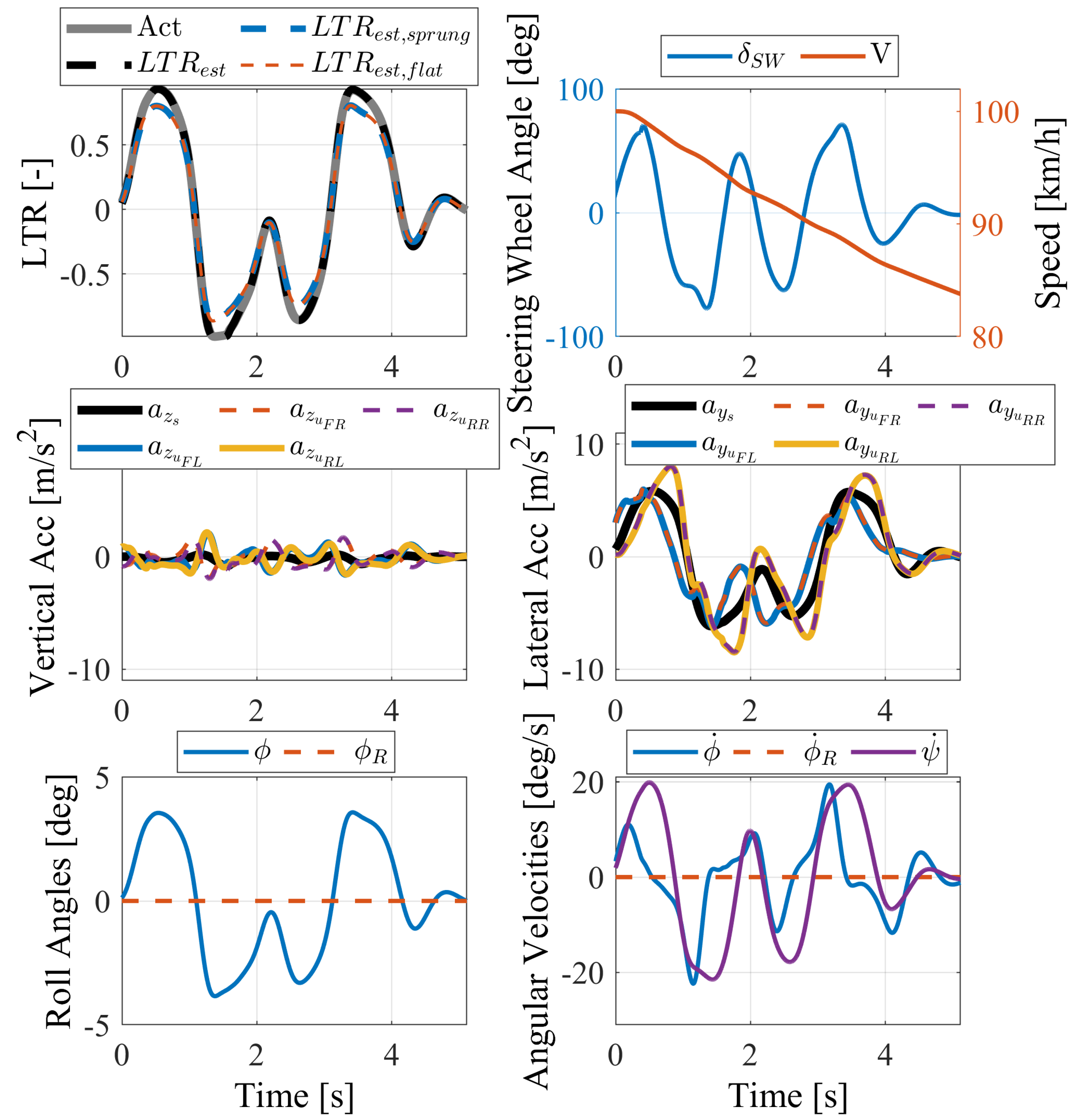
6.1. Fast Ramp Steering on a Banked Road
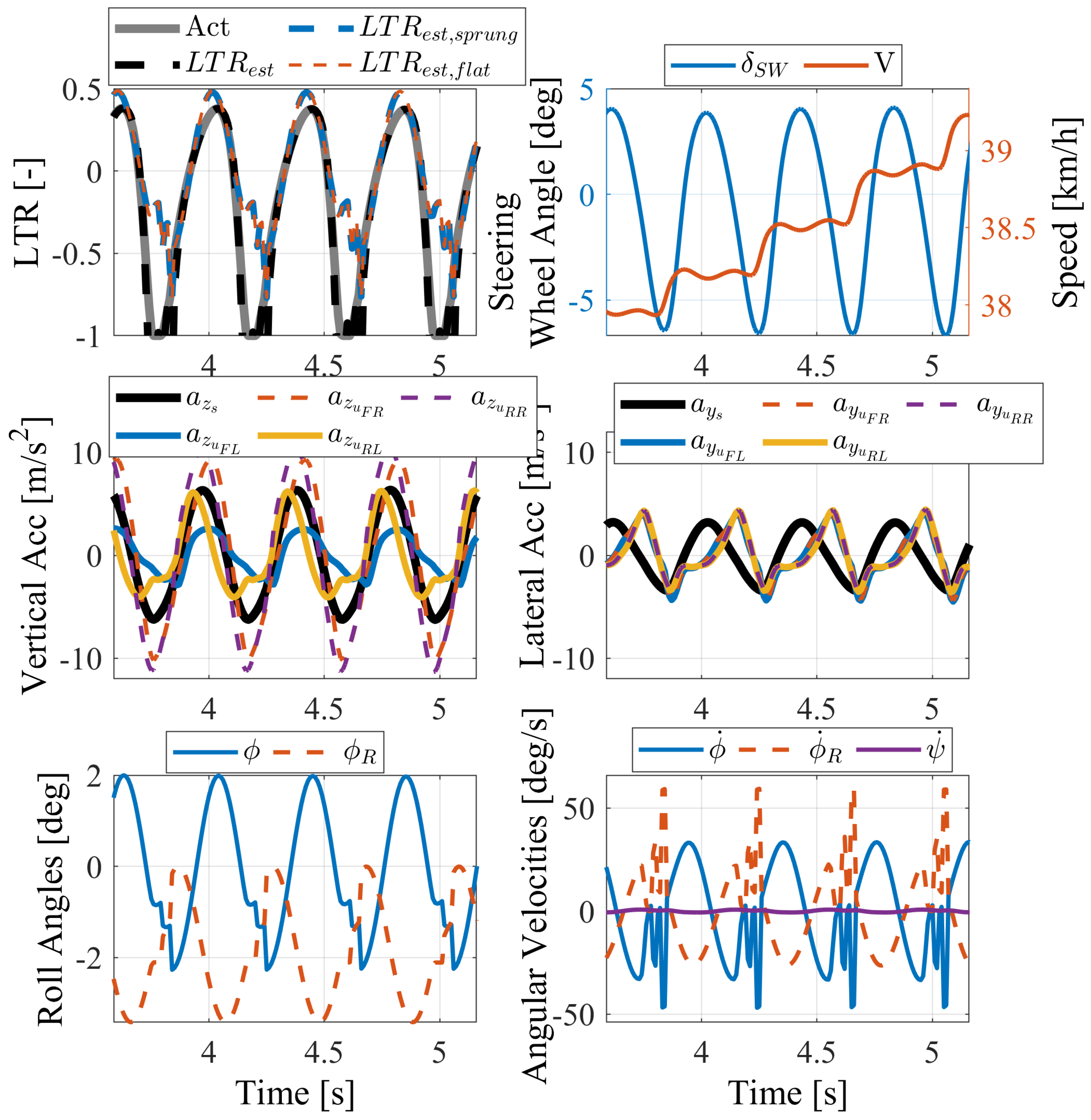
6.2. Double Lane Change on a Flat Road
7. Conclusions
- A quantitative indication of the anti rollover risk is represented by the , thus detecting the critical limit above which a wheel lifted off occurs. However, the does not represent a measurable quantity due to the extreme difficulty in estimating the vertical load transfers among the vehicle corners. The paper proposes three model-based formulations, by considering an increased level of complexity. The most generic formulation includes the influence of the road bank angle, unsprung masses and vertical dynamics. Numerical simulations of aggressive manoeuvres on flat roads, banked roads and in presence of asymmetrical speed bump waves, show the significant reliability of the generic model-based formulation when compared to the two simplified versions widespread in the literature;
- The incipient rollover occurs when a defined threshold is approached. The paper proves that the ISO-LTR characteristics, i.e., the combination of vehicle relative roll speeds and angles where the is constant, are linear in the phase plane portrait of the vehicle roll dynamics. This is analytically explained through the model-based formulation, and numerically verified with multiple simulations in IPG CarMaker®. The paper also shows that the model-based formulation provides a qualitative tool to predict how the ISO-LTR lines would change when a road perturbation, i.e., road bank angle or irregularities, is encountered. The ISO-LTR slopes are only influenced by the suspension system configuration and parameters (total roll stiffness and damping), meanwhile the severity of the manoeuvre (lateral and vertical accelerations) and the road global and local perturbations provoke an horizontal shift of the ISO-LTR lines;
- The model-based formulation is essential to analytically evaluate the main influencing factors on the load transfer dynamics between the left and right vehicle sides. However, any mathematical formulation is affected by parameters uncertainties, external disturbances and unmodeled dynamics that compromises its effectiveness for a realistic implementation, especially when noisy experimental measurements are input to the analytical formulation. For this reason, the statistical approach, based on the recurrent neural network principle, is proposed as an alternative methodology to estimate the LTR in a realistic scenario. Indeed, the input of the RNN algorithm are typical measurable quantities available for an experimental implementation, which represent the natural following step the authors are going to explore in the near future. The RNN approach provides excellent results in estimating the front and the rear load transfers even in presence of complex and realistic driving scenarios.
- The detection of current is not sufficient to predict the incipient risk of rollover. A ISO-LTR Predictive Time is then derived to proactively calculate the necessary time to reach a particular threshold. The proposed predictive index is then successfully verified through a fast ramp steering maneuver on a banked road and during an aggressive double lane change manoeuvre. In both cases, the demonstrates promising predictive capabilities, compatible with the intervention of a control active strategy.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Deutermann, W. Characteristics of Fatal Rollover Crashes; NHTSA Tecnical Report DOT HS 809 438; National Center for Statistics and Analysis Research and Development: Washington, DC, USA, 2002; pp. 1–52. [Google Scholar]
- Padmanaban, J.; Shields, L.E.; Scheibe, R.R.; Eyges, V.E. A comprehensive review of rollover accidents involving vehicles equipped with Electronic Stability Control (ESC) systems. Ann. Adv. Automot. Med. 2008, 52, 9–19. [Google Scholar]
- Han, I.; Rho, K. Characteristic analysis of vehicle rollover accidents: Rollover scenarios and prediction/warning. Int. J. Automot. Technol. 2017, 18, 451–461. [Google Scholar] [CrossRef]
- Rollover Resistance; NHTSA Tecnical Report RIN 2127-AI81; Department of Transportation: Washington, DC, USA, 2001; pp. 1–159.
- Matolcsy, M. The severity of bus rollover accidents. In Proceedings of the 20th International Technical Conference on the Enhanced Safety of Vehicles (ESV), Lyon, France, 18–21 June 2007; pp. 1–10. [Google Scholar]
- Liang, C.C.; Le, G.N. Analysis of bus rollover protection under legislated standards using LS-DYNA software simulation techniques. Int. J. Automot. Technol. 2010, 11, 495–506. [Google Scholar] [CrossRef]
- Winkle, C.B.; Ervin, R.D. Rollover of Heavy Commercial Vehicles. In Tecnical Report UMTRI-99-19; University of Michigan-Transportation Research Institute: Ann Arbor, MI, USA, 1999; pp. 1–64. [Google Scholar]
- Vella, A.D.; Lisitano, D.; Tota, A.; Wang, B. Analysis of heavy commercial vehicle cornering behaviour through a multibody model. Int. J. Mech. Control 2020, 21, 39–50. [Google Scholar]
- Furleigh, D.; Vanderploeg, M.; Oh, C. Multiple steered axles for reducing the rollover risks of heavy articulated trucks. SAE Trans. 1988, 97, 837–841. [Google Scholar]
- Sampson, D.J.M.; Cebon, D. An investigation of roll control system design for articulated heavy vehicles. In Proceedings of the 4th International Symposium on Advanced Vehicle Control (AVEC’98), Nagoya, Japan, 14–18 September 1998; pp. 1–6. [Google Scholar]
- Lin, R.C.; Cebon, D.; Cole, D.J. Active roll control of articulated vehicles. Veh. Syst. Dyn. Int. J. Veh. Mech. Mobil. 2007, 26, 17–43. [Google Scholar] [CrossRef]
- Tota, A.; Velardocchia, M.; Rota, E.; Novara, A. Steering behavior of an articulated amphibious all-terrain tracked vehicle. In Proceedings of the SAE 2020 World Congress & Exhibition (SAE WCX 2020), Online, 21–23 April 2020; pp. 1–11. [Google Scholar]
- Tota, A.; Galvagno, E.; Velardocchia, M.; Rota, E.; Novara, A. Articulated Steering Control for an All-Terrain Tracked Vehicle. In Proceedings of the International Federation for the Promotion of Mechanism and Machine Science (IFToMM ITALY 2020), Online, 9–11 September 2020; pp. 823–830. [Google Scholar]
- Tota, A.; Galvagno, E.; Velardocchia, M. Analytical Study on the Cornering Behavior of an Articulated Tracked Vehicle. Machines 2021, 9, 38. [Google Scholar] [CrossRef]
- Cossalter, V.; Lot, R.; Massaro, M. The influence of frame compliance and rider mobility on the scooter stability. Veh. Syst. Dyn. 2007, 45, 313–326. [Google Scholar] [CrossRef]
- Vasquez, F.; Lot, R.; Rustighi, E. Optimisation of off-road motorcycle suspensions. In Proceedings of the 15th European Automotive Congress, Madrid, Spain, 2–4 October 2017; pp. 1–10. [Google Scholar]
- Bonisoli, E.; Lisitano, D.; Dimauro, L. Detection of critical mode-shapes in flexible multibody system dynamics: The case study of a racing motorcycle. Mech. Syst. Signal Process. 2022, 180, 109370. [Google Scholar] [CrossRef]
- Bonisoli, E.; Lisitano, D.; Dimauro, L. Experimental and numerical mode shape tracing from components to whole motorbike chassis. In Proceedings of the 28th International Conference on Noise and Vibration Engineering (ISMA 2018) and 7th International Conference on Uncertainty in Structural Dynamics (USD 2018), Leuven, Belgium, 17–19 September 2018; pp. 3597–3604. [Google Scholar]
- Bonisoli, E.; Lisitano, D.; Dimauro, L.; Peroni, L. A proposal of dynamic behaviour design based on mode shape tracing: Numerical application to a motorbike frame. In Proceedings of the Society for Experimental Mechanics Series (37th IMAC), Orlando, FL, USA, 28–31 January 2019; Springer: New York, NY, USA, 2020; pp. 149–158. [Google Scholar]
- Roland Berger. Fuel Cells Hydrogen Trucks. Available online: https://www.fch.europa.eu/publications/study-fuel-cells-hydrogen-trucks (accessed on 27 August 2022).
- Tota, A.; Galvagno, E.; Dimauro, L.; Vigliani, A.; Velardocchia, M. Energy management strategy for hybrid multimode powertrains: Influence of inertial properties and road inclination. Appl. Sci. 2021, 11, 11752. [Google Scholar] [CrossRef]
- Phanomchoeng, G.; Rajamani, R. New rollover index for the detection of tripped and untripped rollovers. IEEE Trans. Ind. Electron. 2013, 60, 4726–4736. [Google Scholar] [CrossRef]
- Jin, Z.; Zhang, L.; Zhang, J.; Khajepour, A. Stability and optimised H∞ Control Tripped Untripped Veh. Rollover. Veh. Syst. Dyn. 2016, 54, 1405–1427. [Google Scholar] [CrossRef]
- Ataei, M.; Khajepour, A.; Jeon, S. A general rollover index for tripped and un-tripped rollovers on flat and banked roads. Proc. Inst. Mech. Eng. Part J. Automob. Eng. 2019, 233, 304–316. [Google Scholar] [CrossRef]
- Johansson, B.; Gäfvert, M. Untripped SUV rollover detection and prevention. In Proceedings of the 43rd IEEE Conference on Decision and Control, Atlantis, Bahamas, 14–17 December 2004; pp. 6461–6466. [Google Scholar]
- Nalecz, A.G. Influence of vehicle and roadway factors on the dynamics of tripped rollover. Int. J. Veh. Des. 2014, 10, 321–346. [Google Scholar]
- Venturini, S.; Bonisoli, E.; Rosso, C.; Rovarino, D.; Velardocchia, M. Modal analyses and meta-models for fatigue assessment of automotive steel wheels. In Proceedings of the Conference Proceedings of the Society for Experimental Mechanics Series (38th IMAC), Houston, TX, USA, 10–13 February 2020; pp. 155–163. [Google Scholar]
- Rovarino, D.; Actis, C.L.; Bonisoli, E.; Rosso, C.; Venturini, S.; Velardocchia, M.; Baecker, M.; Gallrein, A. A Methodology for Automotive Steel Wheel Life Assessment; SAE Technical Paper; SAE: St. Joseph, MN, USA, 2020; pp. 1–10. [Google Scholar] [CrossRef]
- Vella, A.D.; Tota, A.; Vigliani, A. On the Road Profile Estimation from Vehicle Dynamics Measurements; SAE Technical Paper; SAE: St. Joseph, MN, USA, 2021; pp. 1–10. [Google Scholar] [CrossRef]
- Yang, H.; Liu, L.Y. A robust active suspension controller with rollover prevention. SAE Int. J. Passeng. Cars-Mech. Syst. 2003, 112, 992–997. [Google Scholar]
- Ataei, M.; Khajepour, A.; Jeon, S. Model predictive rollover prevention for steer-by-wire vehicles with a new rollover index. Int. J. Control 2020, 93, 140–155. [Google Scholar] [CrossRef]
- Fortina, A.; Velardocchia, M.; Sorniotti, A. Braking System Components Modelling; SAE Technical Paper; SAE: St. Joseph, MN, USA, 2003; pp. 1–12. [Google Scholar] [CrossRef]
- Lapapong, S. Vehicle rollover prevention for banked surfaces. PhD Thesis, The Pennsylvania State University, State College, PA, USA, 2010. [Google Scholar]
- Huston, R.L.; Kelly, F.A. Another look at the static stability factor (SSF) in predicting vehicle rollover. Int. J. Crashworthiness 2014, 19, 567–575. [Google Scholar] [CrossRef]
- Pai, J. Trends and Rollover-Reduction Effectiveness of Static Stability Factor in Passenger Vehicles; NHTSA Tecnical Report DOT HS 812 444; National Center for Statistics and Analysis Research and Development: Washington, DC, USA, 2017; pp. 1–141. [Google Scholar]
- Rajamani, R. Vehicle Dynamics and Control, 2nd ed.; Springer: New York, NY, USA, 2011; pp. 1–498. [Google Scholar]
- Velardocchia, M.; Vigliani, A. Control systems integration for enhanced vehicle dynamics. Open Mech. Eng. J. 2013, 7, 58–69. [Google Scholar] [CrossRef]
- Yoon, J.; Kim, D.; Yi, K. Design of a rollover index-based vehicle stability control scheme. Veh. Syst. Dyn. Int. J. Veh. Mech. Mobil. 2007, 45, 459–475. [Google Scholar]
- Dahmani, H.; Chadli, M.; Rabhi, A.; El Hajjaji, A. Vehicle dynamic estimation with road bank angle consideration for rollover detection: Theoretical and experimental studies. Veh. Syst. Dyn. 2013, 51, 1853–1871. [Google Scholar] [CrossRef]
- Zhang, X.; Yang, Y.; Guo, K.; Yang, Y.; He, G. Vehicle roll centre estimation with transient dynamics via roll rate. Veh. Syst. Dyn. 2020, 55, 699–717. [Google Scholar] [CrossRef]
- Odenthal, D.; Bünte, T.; Ackermann, J. Nonlinear steering and braking control for vehicle rollover avoidance. In Proceedings of the 1999 European Control Conference (ECC), Karlsruhe, Germany, 31 August–3 September 1999; pp. 1–6. [Google Scholar]
- Wielenga, T.J.; Chace, M.A. A Study in Rollover Prevention Using Anti-Rollover Braking; SAE Technical Paper; SAE: St. Joseph, MN, USA, 2000; pp. 1–10. [Google Scholar] [CrossRef]
- Chen, B.; Peng, H. Differential-braking-based rollover prevention for sport utility vehicles with human-in-the-loop evaluations. Veh. Syst. Dyn. 2001, 36, 359–389. [Google Scholar] [CrossRef]
- Huang, Z.; Nie, W.; Kou, S.; Son, X. Rollover detection and control on the non-driven axles of trucks based on pulsed braking excitation. Veh. Syst. Dyn. 2018, 56, 1864–1882. [Google Scholar] [CrossRef]
- Guizhen, Y.; Honggang, L.; Pengcheng, W.; Xinkai, W.; Yunpeng, W. Real-time bus rollover prediction algorithm with road bank angle estimation. Chaos, Solitons Fractals 2016, 89, 270–283. [Google Scholar] [CrossRef]
- Cao, J.; Jing, L.; Guo, K.; Yu, F. Study on integrated control of vehicle yaw and rollover stability using nonlinear prediction model. Math. Probl. Eng. 2013, 2013, 643548. [Google Scholar] [CrossRef]
- Ricco, M.; Zanchetta, M.; Rizzo, G.C.; Tavernini, D.; Sorniotti, A.; Chatzikomis, C.; Velardocchia, M.; Geraerts, M.; Dhaens, M. On the design of yaw rate control via variable front-to-total anti-roll moment distribution. IEEE Trans. Veh. Technol. 2020, 69, 1388–1403. [Google Scholar] [CrossRef]
- Ricco, M.; Percolla, A.; Rizzo, G.C.; Zanchetta, M.; Tavernini, D.; Dhaens, M.; Geraerts, M.; Vigliani, A.; Tota, A.; Sorniotti, A. On the model-based design of front-to-total anti-roll moment distribution controllers for yaw rate tracking. Veh. Syst. Dyn. 2022, 60, 569–596. [Google Scholar] [CrossRef]
- Goldman, R.W.; El-Gindy, M.; Kulakowski, B.T. Rollover dynamics of road vehicles: Literature survey. Int. J. Heavy Veh. Syst. 2001, 8, 103–141. [Google Scholar] [CrossRef]
- Solmaz, S.; Corless, M.; Shorten, R. A methodology for the design of robust rollover prevention controllers for automotive vehicles with active steering. Int. J. Control 2007, 80, 1763–1779. [Google Scholar] [CrossRef]
- Imine, H.; Benallegue, A.; Madani, T.; Srairi, S. Rollover risk prediction of heavy vehicle using high-order sliding-mode observer: Experimental results. IEEE Trans. Veh. Technol. 2014, 63, 2533–2543. [Google Scholar] [CrossRef]
- Larish, C.; Piyabongkarn, D.; Tsourapas, V.; Rajamani, R. A new predictive lateral load transfer ratio for rollover prevention systems. IEEE Trans. Veh. Technol. 2013, 62, 2928–2936. [Google Scholar] [CrossRef]
- Zhang, X.; Yang, Y.; Guo, K.; Lv, J.; Peng, T. Contour line of load transfer ratio for vehicle rollover prediction. Veh. Syst. Dyn. 2017, 55, 1748–1763. [Google Scholar] [CrossRef]
- Yoon, J.; Cho, W.; Koo, B.; Yi, K. Unified chassis control for rollover prevention and lateral stability. IEEE Trans. Veh. Technol. 2009, 58, 596–609. [Google Scholar] [CrossRef]
- Tota, A.; Velardocchia, M.; Güvenç, L. Path Tracking Control for Autonomous Driving Applications. In Proceedings of the International Conference on Robotics in Alpe-Adria-Danube Region (RAAD 2017), Turin, Italy, 21–23 June 2017; pp. 456–467. [Google Scholar]
- Sellami, Y.; Imine, H.; Boubezoul, A.; Cadiou, J.C. Rollover risk prediction of heavy vehicles by reliability index and empirical modelling. Veh. Syst. Dyn. 2018, 56, 385–405. [Google Scholar] [CrossRef]
- Zhu, T.; Yin, X.; Na, X.; Li, B. Research on a Novel Vehicle Rollover Risk Warning Algorithm Based on Support Vector Machine Model. IEEE Access 2020, 8, 108324–108334. [Google Scholar] [CrossRef]
- Chen, X.; Chen, W.; Hou, L.; Hu, H.; Bu, X.; Zhu, Q. A novel data-driven rollover risk assessment for articulated steering vehicles using RNN. J. Mech. Sci. Technol. 2020, 34, 2161–2170. [Google Scholar] [CrossRef]
- Baldi, M.M.; Perboli, G.; Tadei, R. Driver maneuvers inference through machine learning. In Lecture Notes in Computer Science (including Subseries Lecture Notes in Artificial Intelligence and Lecture Notes in Bioinformatics) 10122 LNCS; Springer: Cham, Switzerland, 2016; pp. 182–192. [Google Scholar] [CrossRef]
- Ackermann, J.; Odenthal, D. Damping of vehicle roll dynamics by gain scheduled active steering. In Proceedings of the 1999 European Control Conference (ECC), Karlsruhe, Germany, 31 August–3 September 1999; pp. 4100–4106. [Google Scholar]
- Rajamani, R.; Piyabongkarn, D.N.; Tsourapas, V.; Lew, J.Y. Real-time estimation of roll angle and CG height for active rollover prevention applications. In Proceedings of the IEEE 2009 American Control Conference, St. Louis, MO, USA, 10–12 June 2009. [Google Scholar]
- Rajamani, R.; Piyabongkarn, D.N. New paradigms for the integration of yaw stability and rollover prevention functions in vehicle stability control. IEEE Trans. Intell. Transp. Syst. 2013, 14, 249–261. [Google Scholar] [CrossRef]
- Lee, S.; Yakubl, F.; Kasahara, M.; Mori, Y. Rollover prevention with predictive control of differential braking and rear wheel steering. In Proceedings of the 6th IEEE Conference on Robotics, Automation and Mechatronics (RAM), 12–15 November 2013; pp. 144–149. [Google Scholar] [CrossRef]
- Huang, H.H.; Yedavalli, R.K.; Guenther, D.A. Active roll control for rollover prevention of heavy articulated vehicles with multiple-rollover-index minimisation. Veh. Syst. Dyn. 2012, 50, 471–493. [Google Scholar] [CrossRef]
- Gaspar, P.; Szaszi, I.; Bokor, J. Reconfigurable control structure to prevent the rollover of heavy vehicles. Control Eng. Pract. 2005, 13, 699–711. [Google Scholar] [CrossRef]
- Boada, M.J.L.; Boada, B.L.; Gauchia Babe, A.; Calvo Ramos, J.A.; Lopez, V.D. Active roll control using reinforcement learning for a single unit heavy vehicle. Int. J. Heavy Veh. Syst. 2009, 16, 596–609. [Google Scholar] [CrossRef]
- Dahmani, H.; Chadli, M.; Rabhi, A.; El Hajjaji, A. Fuzzy observer for detection of impending vehicle rollover with road bank angle considerations. In Proceedings of the IEEE 18th Mediterranean Conference on Control and Automation (MED’10), Marrakech, Marocco, 23–25 June 2010; pp. 1497–1502. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | Description | Parameter | Value |
|---|---|---|---|
| Springs | Total roll stiffness | K | |
| Dampers | Total roll damping | C | |
| Masses and inertia | Roll sprung mass moment of inertia | ||
| Sprung mass | |||
| FR unsprung mass | |||
| FL unsprung mass | |||
| RR unsprung mass | |||
| RL unsprung mass | |||
| Total mass | m | ||
| Distances | Front axle from the sprung mass CoG | a | |
| Rear axle from the sprung mass CoG | b | ||
| Wheelbase | L | ||
| Track width | T | ||
| Unsprung mass CoG height | |||
| Roll centre height | |||
| Sprung mass CoG from the roll centre | |||
| Front tyre radius | |||
| Rear tyre radius |
| Type | Description | Units |
|---|---|---|
| Inputs | Longitudinal speed | |
| Longitudinal acceleration | ||
| Lateral acceleration | ||
| Vertical acceleration | ||
| roll rate | ||
| yaw rate | ||
| pitch rate | ||
| steer angle | ||
| Outputs | Roll angle | |
| Front load transfer ratio | − | |
| Rear load transfer ratio | − |
| Type | Description | Characteristics |
|---|---|---|
| Layers | Sequence input | Number of features (8) |
| LSTM | Number of hidden units (100) | |
| Fully connected | Number of Responses (3) | |
| Regression | ||
| Main Hyperparameters | Adam | Adaptive moment estimation |
| MaxEpochs | 850 | |
| GradientThreshold | 1 | |
| InitialLearnRate | 0.01 | |
| LearnRateDropPeriod | 425 | |
| LearnRateDropFactor | 0.2 |
| Maneuver | Error | Values |
|---|---|---|
| Bernina | MAE Front | |
| MAE Rear | ||
| MAE Roll | ||
| MSE Front | × | |
| MSE Rear | × | |
| MSE Roll | ||
| Stelvio | MAE Front | |
| MAE Rear | ||
| MAE Roll | ||
| MSE Front | × | |
| MSE Rear | × | |
| MSE Roll | ||
| FishHook | MAE Front | |
| MAE Rear | ||
| MAE Roll | ||
| MSE Front | × | |
| MSE Rear | × | |
| MSE Roll |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tota, A.; Dimauro, L.; Velardocchia, F.; Paciullo, G.; Velardocchia, M. An Intelligent Predictive Algorithm for the Anti-Rollover Prevention of Heavy Vehicles for Off-Road Applications. Machines 2022, 10, 835. https://doi.org/10.3390/machines10100835
Tota A, Dimauro L, Velardocchia F, Paciullo G, Velardocchia M. An Intelligent Predictive Algorithm for the Anti-Rollover Prevention of Heavy Vehicles for Off-Road Applications. Machines. 2022; 10(10):835. https://doi.org/10.3390/machines10100835
Chicago/Turabian StyleTota, Antonio, Luca Dimauro, Filippo Velardocchia, Genny Paciullo, and Mauro Velardocchia. 2022. "An Intelligent Predictive Algorithm for the Anti-Rollover Prevention of Heavy Vehicles for Off-Road Applications" Machines 10, no. 10: 835. https://doi.org/10.3390/machines10100835