1. Introduction
Compared with other driving vehicles, a four-wheel independently driven electric vehicle (FWID EV) has a simple structure with an in-wheel motor or wheel-side motor as a direct power source. This improves the energy transfer efficiency and the torque responds quickly. These advantages provide a basis for achieving a better stability control performance. Therefore, FWID EVs have become the focus of many researchers [
1,
2,
3,
4,
5,
6].
When a vehicle is driving on a wet road at high speed, improper driving can easily cause the lateral instability of the vehicle, making the vehicle sideslip and tail-flick and eventually lead to traffic accidents. Several scholars have studied the problems of vehicle sideslips and instability. In [
7], the lateral control of a vehicle with longitudinal velocity variations was investigated. An improved proportional-integral control law was proposed and optimized to improve the lateral stability and handling performance of the vehicle. A new hybrid stability control system was proposed in [
8] for avoiding vehicle skidding. The system controlled the lateral acceleration and the yaw moment of the vehicle which, according to the vehicle information compensated for the steering characteristics, thereby improving the steering performance. In [
9], an H-infinity-based delay-tolerant linear quadratic regulator control strategy was proposed. The lateral movement and stability of the FWID EV as affected by time-varying delays were better solved. In [
10], a switching strategy, composed of an error judgment strategy and a model matching strategy, was used to identify the working environment of the vehicle. In [
11], a switched control strategy of the front wheel active steering and external yaw moment coordination was adopted to achieve vehicle stability under limited handling conditions. In [
12], a stability controller for a high-rise vehicle based on the parametric MPC was proposed to improve the lateral stability.
In addition, it is easy to rollover when a vehicle turns sharply at high speed on a high-adhesion-coefficient road. Therefore, vehicle rollovers have attracted increasing attention in the context of serious traffic accidents. Many researchers have conducted extensive research in the recent years to reduce the harm caused by vehicle rollovers and improve the safe driving performance of vehicles. In [
13], an improved sliding mode control strategy based on a state observer was proposed. It ensured that the lane-keeping errors and roll angle remained within a specified performance range. The contour lines of the load transfer ratio (CL-LTR) and the CL-LTR-based vehicle rollover index (CLRI) were proposed in [
14]. Based on the CLRI, the rollover prediction for a vehicle is enhanced and the vehicle stability is improved. In [
15], a control method for the rollover mitigation based on a rollover index/lateral stability was proposed. The method decreased the risk of rollover under the premise of ensuring the lateral stability of the vehicle. In [
16], a double-layer dynamic decoupling control system (DDDCS), composed of an upper dynamic decoupling unit (DDU) and a lower steering control unit (SCU), was proposed to ensure the yaw stability of vehicles.
With increasing investigations on intelligent vehicles, vehicle path tracking control has become a research hotspot. The purpose of a path tracking control is to provide accurate tracking and stability control under the intervention of control algorithms. At present, researchers have used many control algorithms for vehicle path tracking control. In [
17], a robust model predictive control (MPC) strategy based on a finite time domain was proposed to manage the parameter uncertainty and external disturbances in a vehicle model, thereby ensuring vehicle stability. A robust H∞ output feedback control strategy was designed in [
18] and the uncertainties of the vehicle lateral velocity, yaw rate, and road curvature were considered for the path tracking. In [
19], a multi-core reinforcement learning method was proposed and achieved better performance in terms of the path tracking accuracy and smoothness. In [
20], an optimal path tracking extended model predictive control (MPC) scheme with multiple constraints and a vehicle-road dynamics synthesis model was proposed to improve the ride comfort and stability of the vehicle path tracking.
With the development of vehicle intelligence, more stringent requirements have been proposed for vehicle dynamic state estimations. It is difficult for low-cost sensors to accurately measure the values of certain state variables of vehicles in real time. However, in practical engineering problems, the state variables that cannot be measured directly are nevertheless required by the controller. To solve such problems, these difficult-to-measure state parameters can be obtained through a state estimation method, which further expands the use range of the vehicle sensors while reducing their use [
21]. Thus, to solve the above problems, we must obtain the vehicle state parameters using a state estimation method. At present, the main methods available include sliding-mode estimation methods [
22], least-squares estimation methods [
23], and Kalman filter estimation methods. In [
24], looking at the problem that certain state variables of underwater vehicles cannot be measured directly, Cui designed an adaptive multi-input multi-output extended state observer to estimate the unmeasured state variables. In [
25], Ma studied the parameter estimation problem of a multi-variable output-error-like system with an autoregressive moving average noise, and proposed a least-squares-based iterative algorithm for an iterative search to solve a problem concerning unknown variables in the information vector. The Kalman filter equation is in a recursive form in the time domain, and thus there is no need to store large amounts of data when solving the equation; therefore, the Kalman filter method is widely used because of its fast operation speed and good real-time performance. In [
26], an unscented Kalman filter (UKF) algorithm, based on the measurable variables was proposed. In this algorithm, the difficult-to-measure real-time state variables on the vehicle were estimated to provide accurate values for an integrated controller. A new integrated Kalman filter method was proposed in [
27]; this method used only low-cost hardware, such as a GPS/inertial navigation system/wheel speed sensor to estimate the dynamic state of the vehicle. In [
28], a bicycle dynamics-based extended Kalman filter was proposed to eliminate the influences of inertial sensor drifts.
It can be seen that researchers have made many achievements in the path tracking the control, the vehicle roll stability control, and the lateral stability control; however, many problems still need to be addressed. For example, when a vehicle tracks a desired path, it is necessary to combine the lateral stability control and rolling stability control to achieve the stability-integrated control in the path tracking. Simultaneously, it is necessary to consider ways to design a smooth switching integrated control strategy for the integrated controller to improve the adaptability of the integrated controller under different working conditions. With the aim to solving the above problems, the main objectives of this study are as follows.
(1) For the proposed integrated controller, a smooth switching strategy is designed for the stability controller such that the stability of the vehicle path tracking is better guaranteed under different road adhesion coefficients.
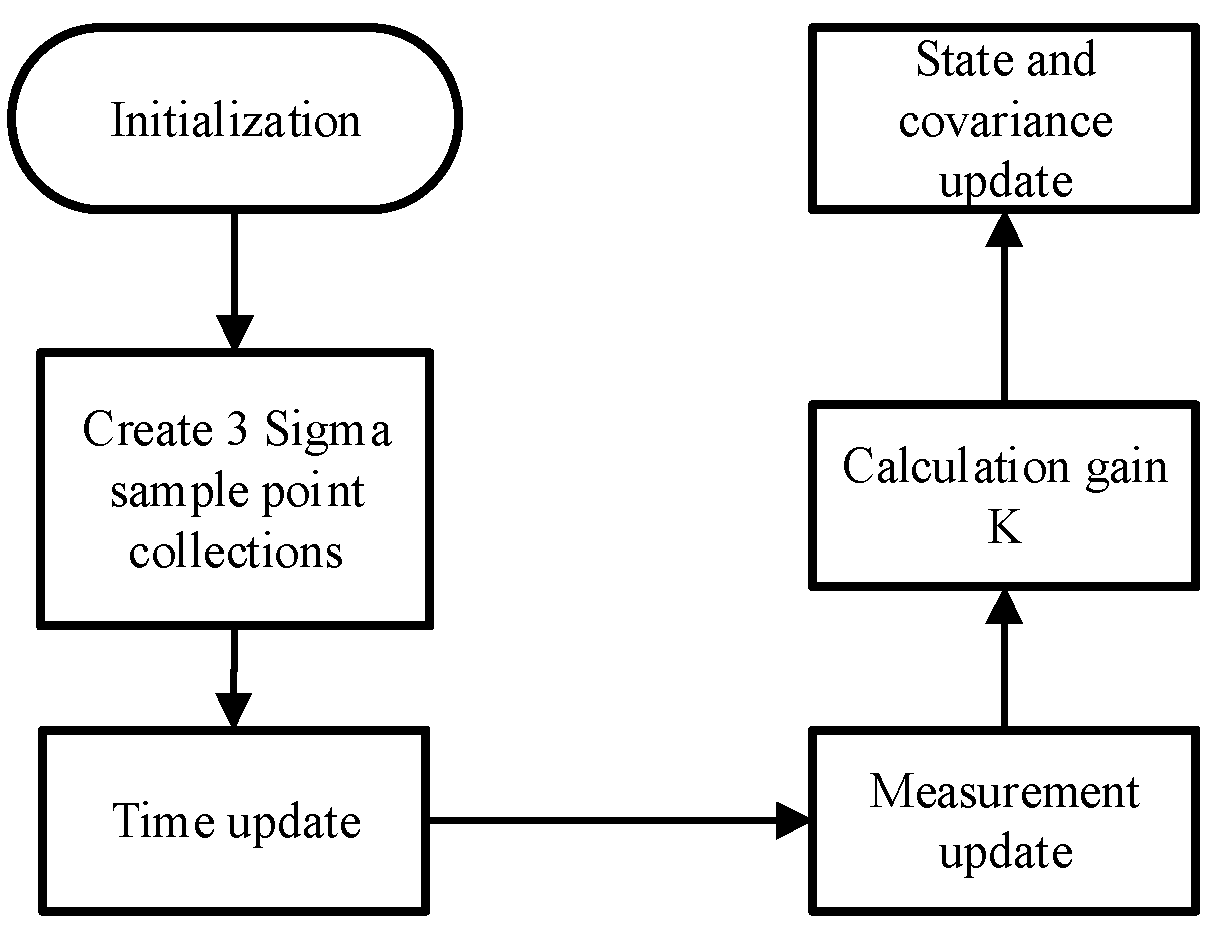
(2) For the vehicle parameter estimation, a planar four-wheel dynamic model and roll dynamic model of the vehicle are established. A vehicle state observer is then designed based on the UKF algorithm, and the lateral velocity, yaw rate, roll angle, and roll angle velocity are estimated in real time. The tire cornering stiffness is estimated online according to the state of the vehicle’s real-time feedback.
(3) The vehicle path tracking controller design is based on the vehicle planar four-wheel dynamic model. The MPC path tracking controller is established to output the desired front wheel angle to ensure that the vehicle can track the desired path under different road adhesion coefficients.
(4) In the vehicle roll stability controller design, based on the roll dynamics model of the vehicle, the MPC roll stability controller is established to realize the vertical load coefficient constraint of the vehicle and ensure the roll stability of the vehicle on a high-speed high-adhesion road.
(5) For the vehicle lateral stability controller design, based on the planar four-wheel dynamic model of the vehicle, the MPC lateral stability controller is established to enforce the constraint of the sideslip angle and ensure the lateral stability of the vehicle on a low-attachment road at high speed.
The remainder of this paper is organized as follows.
Section 2 discusses the method adopted to build the vehicle planar dynamics model and the vehicle roll dynamics model. The vehicle state and the tire cornering stiffness are estimated in
Section 3. The proposed integrated controller is described in
Section 4.
Section 5 presents the verification of the effectiveness of the proposed controller through simulations. The conclusions are presented in
Section 6.
4. Design of the Path Tracking Stability Controller
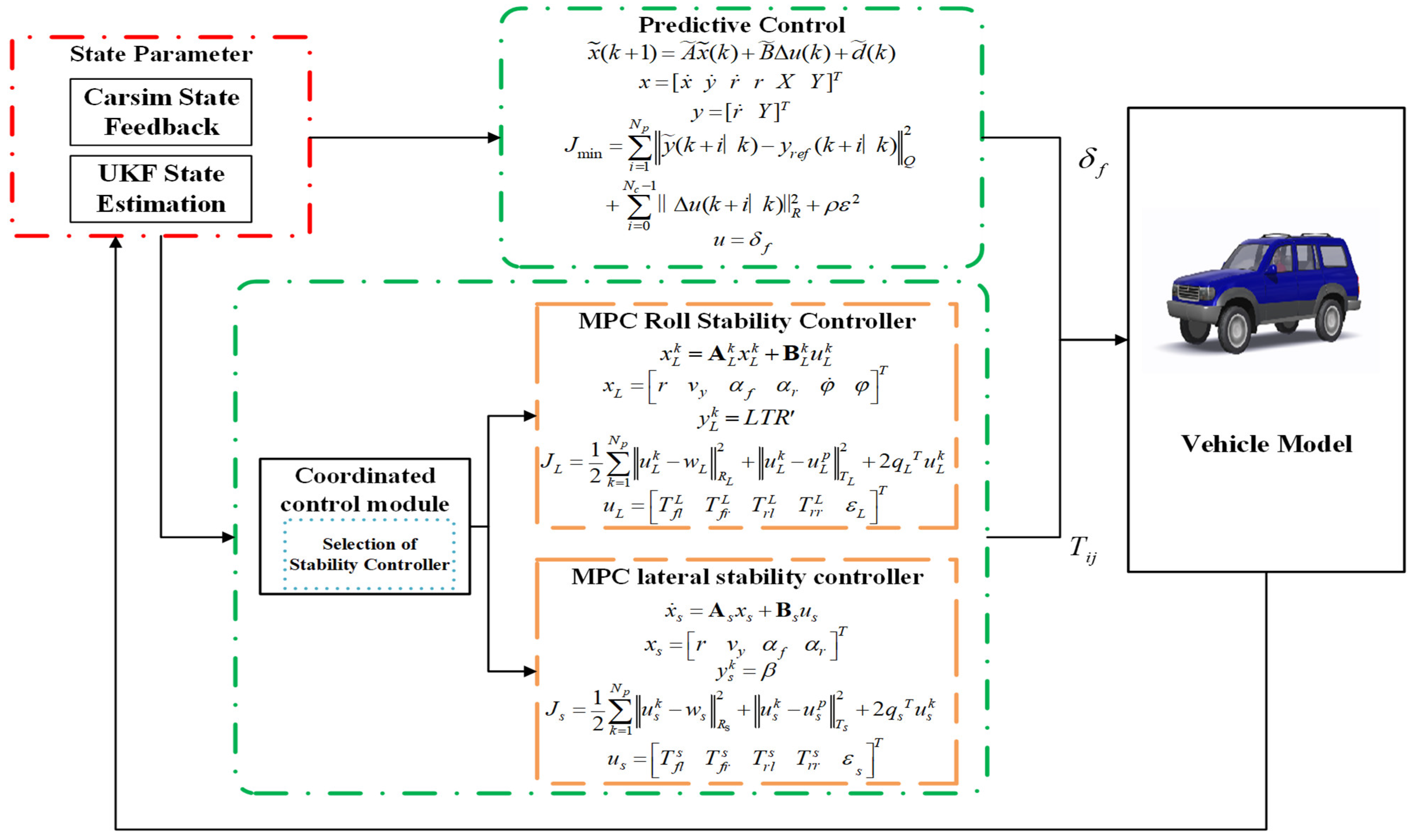
As described in this section, the path tracking stability controller is designed using a hierarchical integrated control structure. The specific composition of the integrated controller is shown in
Figure 4.
The two green virtual frames shown in
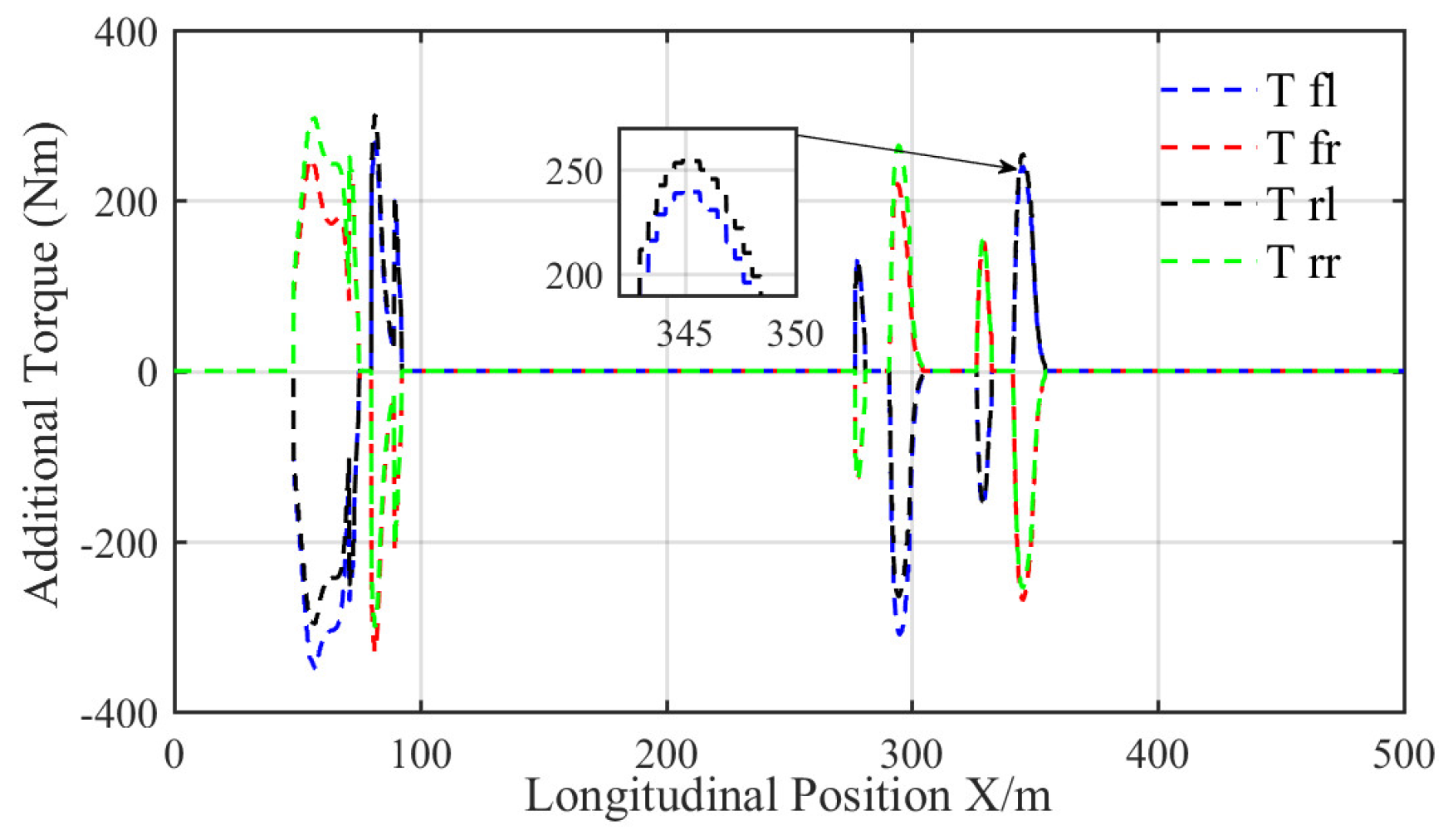
Figure 4 represent the MPC path tracking controller and the MPC stability integrated controller. The stability integrated controller monitors the lateral load transfer rate and the side-slip coefficient in real time through a coordinated control module. According to the internal coordination strategy, the MPC roll stability controller and the MPC lateral stability controller can be used to control the vehicle stability during the path tracking by generating additional torque. The red virtual box represents the state parameter input and output modules; this is used for the closed-loop control of the entire control system. Notably, the coordinated control module is the key to the design of the stability integrated controller, and directly affects the rationality of the control system and accuracy of the control. The coordinated control module includes the selection of the judgment conditions for the vehicle stability and the formulation of the coordination strategies.
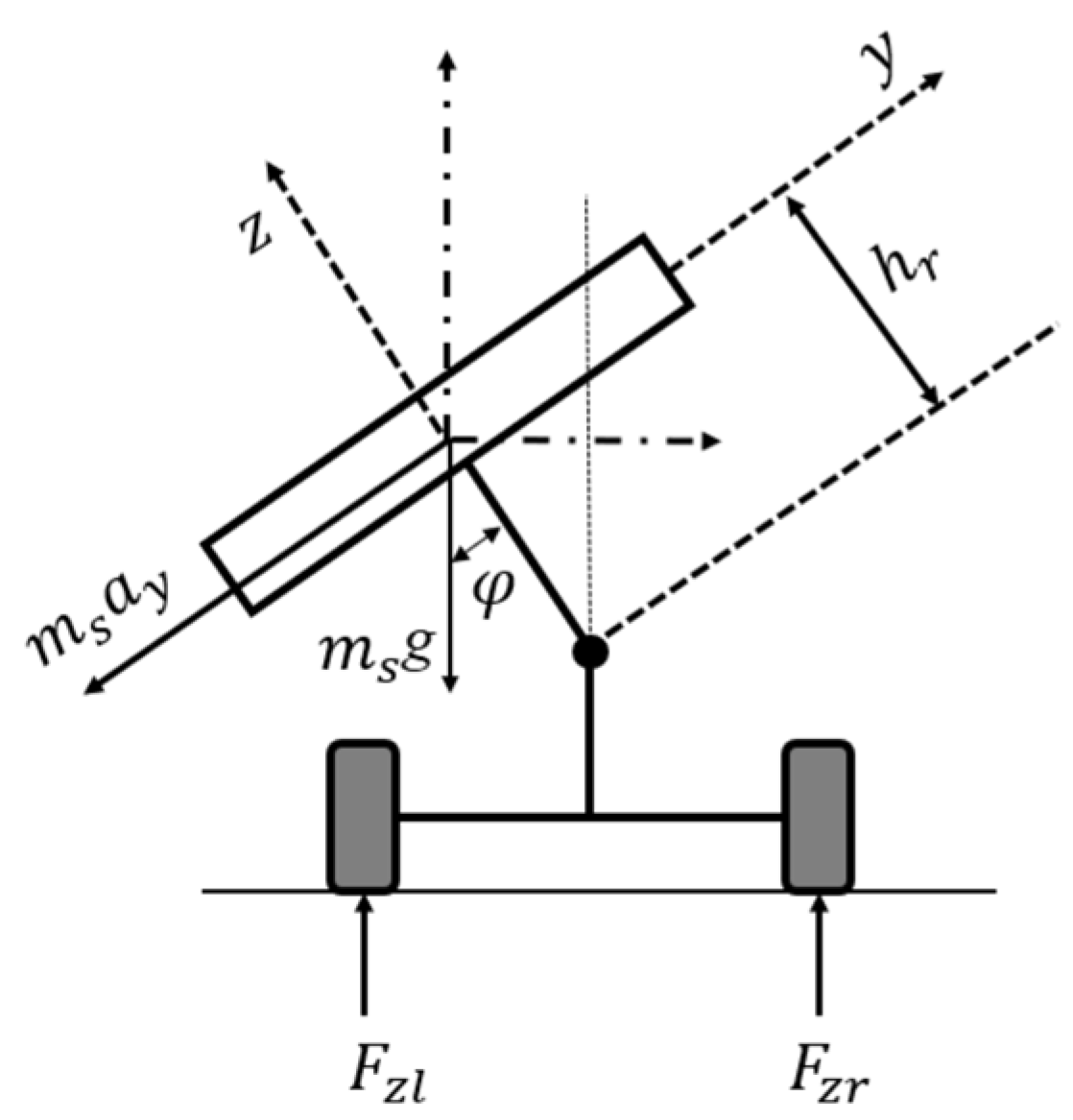
The load transfer ratio (LTR) is often used as a criterion for describing the vehicle rollover stability, and its value directly reflects the vehicle rollover risk. It can be described as follows:
The LTR varies from −1 to 1, where −1 and 1 indicates that the vehicle rolls over. Considering that the vertical load of the wheel is not easy to measure in practice, a state value obtained by a vehicle-mounted sensor or the state estimator is used instead of the vertical load for the approximate calculation of the LTR. The approximate expression is written follows:
where
is the distance from the center of the roll of the vehicle to the center of mass,
is the distance between the vehicle suspension springs,
is the gravitational acceleration, and
is the roll angle.
The lateral sliding coefficient (
) is the standard for describing the lateral stability of vehicles, and its value directly reflects the risk of the lateral vehicle sliding. It can be described as follows:
where
is the lateral force of the tire and
is the vertical force of the tire.
As the above two coefficients reflect the stability of the vehicle, in this study, the sideslip coefficient () and lateral LTR are selected as the judgment conditions for the vehicle stability.
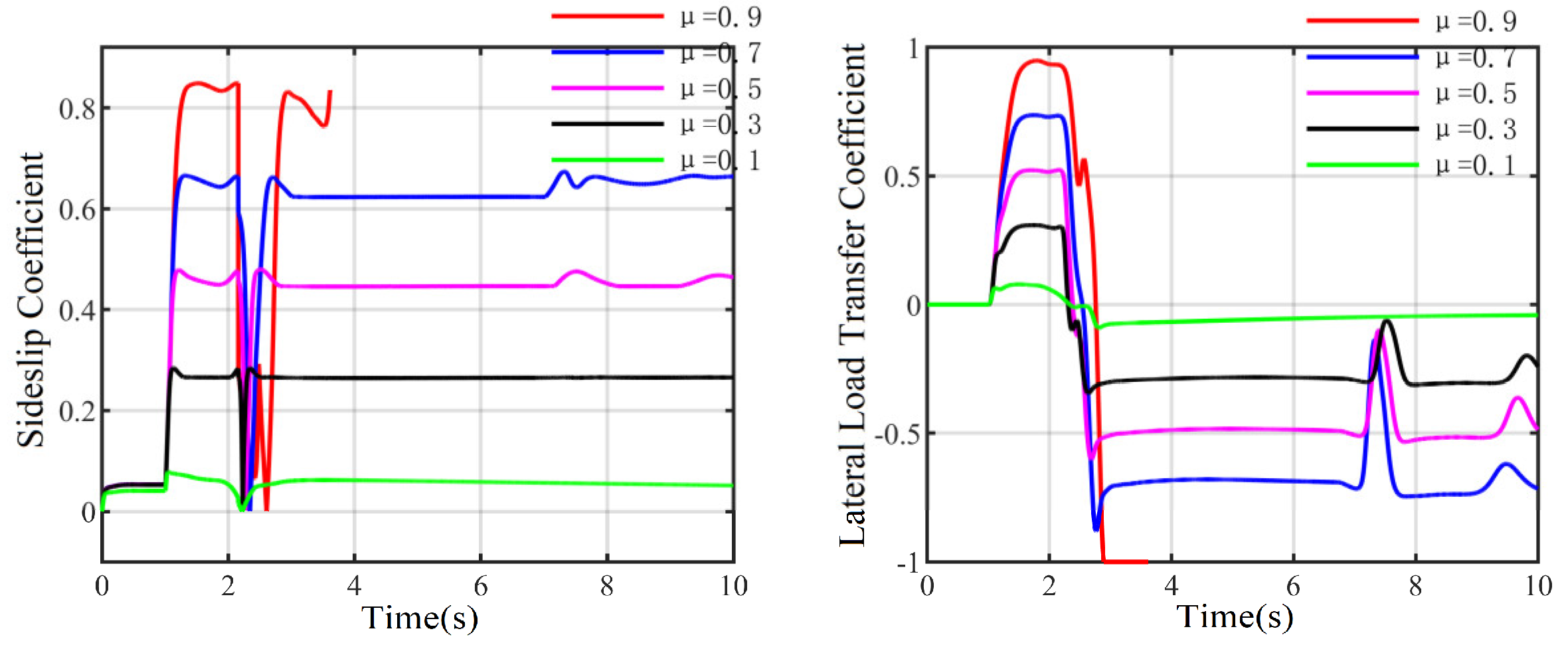
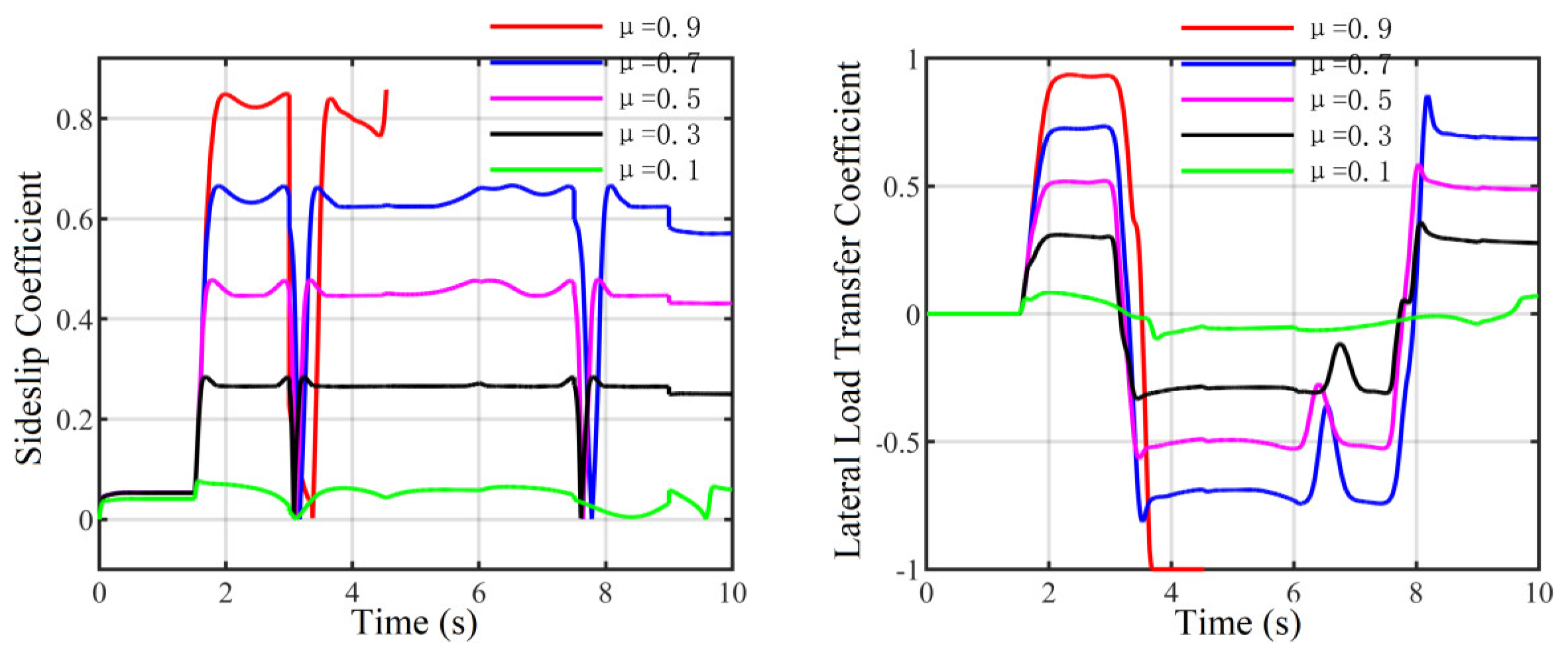
To determine the threshold ranges for the vehicle stability conditions and establish a suitable coordination strategy, the fishhook steering and the snake steering are selected as the test conditions, and the relationship diagram of the road adhesion coefficient
and the LTR is drawn. As shown in
Figure 5 and
Figure 6, the LTR and
vary with the steering wheel angle. When the vehicle is under the fishhook or snake condition on a road with an adhesion coefficient of 0.9, a rollover occurs; the LTR reaches 1, and the maximum
is approximately 0.83. When a road with an adhesion coefficient of 0.7 undergoes the same steering, the LTR under the fishhook condition reaches 0.88 and that under the snake condition reaches 0.8, whereas the maximum sideslip coefficients under these conditions are 0.63 and 0.65, respectively. When driving on a road with an. adhesion coefficient of 0.5, the maximum value of the LTR under the fishhook condition is approximately 0.52, whereas that under the snake condition is approximately 0.5, and the maximum values of
are approximately 0.44 and 0.45, respectively. This indicates that the vehicle is more prone to a plane sideslip instability when performing under high-speed sharp turn conditions on a road with this adhesion coefficient. When the adhesion coefficient is 0.3, the maximum value of the LTR is approximately 0.3 and the maximum value of
is 0.25 under the different working conditions.
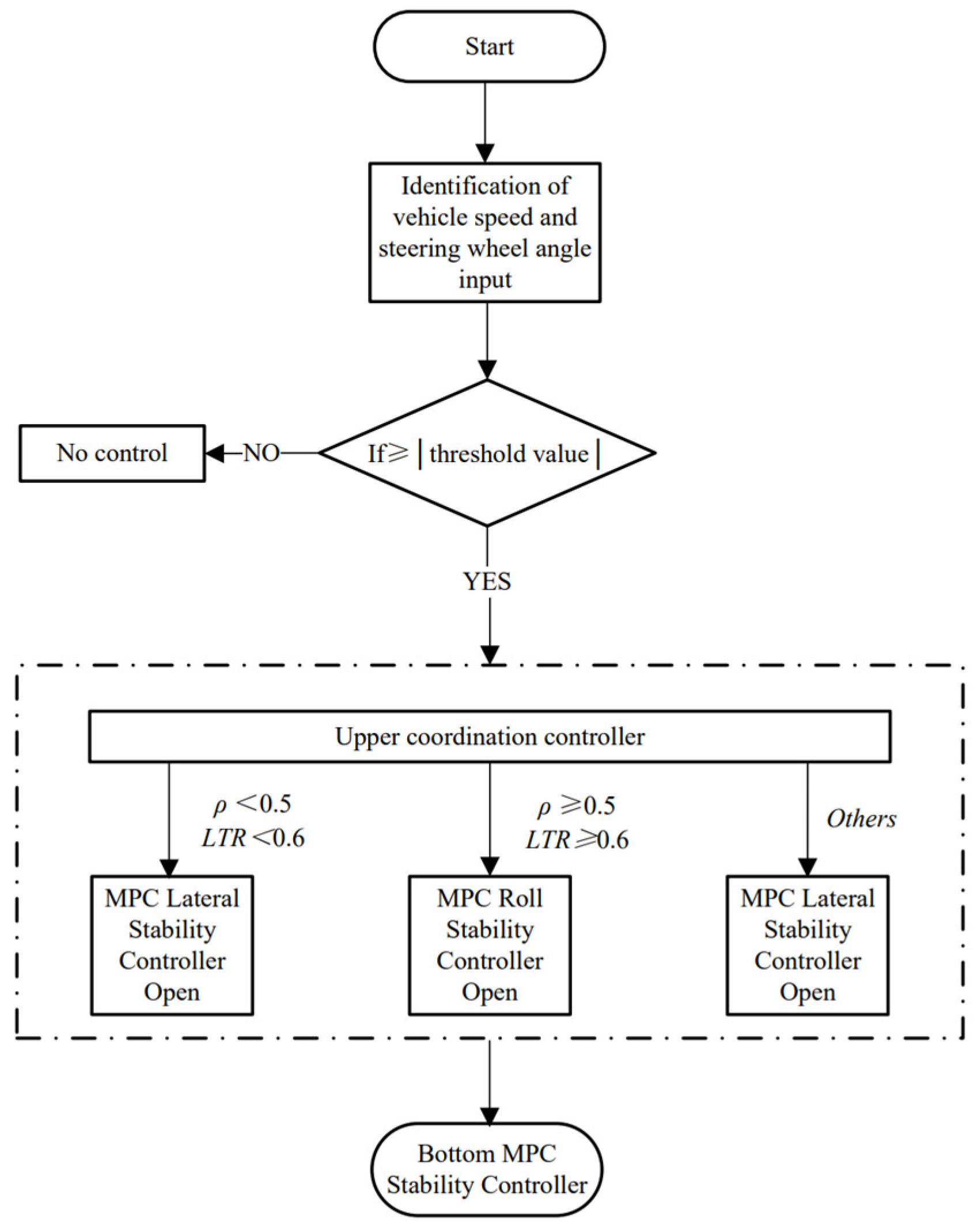
By setting different speeds and steering wheel angles, multiple sets of simulation tests were conducted to determine the threshold intervals for the decision conditions of the LTR and
. A coordination strategy was formulated as in
Figure 7.
(1) When the vehicle speed and the steering wheel angle are lower than the set thresholds, it indicates that the vehicle is in a safe driving state, and the MPC lateral stability controller and MPC roll stability controller will not be operated.
(2) When the vehicle speed and steering wheel angle exceed the set thresholds, the upper supervision decision module will monitor the lateral LTR and in real time. When the is less than 0.5 and the LTR is less than 0.6, the vehicle is prone to a lateral slip instability when driving on a low-adhesion-coefficient road, but only the MPC lateral stability controller is needed.
(3) When is greater than or equal to 0.5 and the LTR is greater than or equal to 0.6, it indicates that the vehicle driving on the road with a high adhesion coefficient is prone to a rollover instability under the condition of a high-speed sharp turn; accordingly, the MPC roll stability controller is turned on.
(4) Considering that the determination conditions may be in other threshold ranges, such as when is greater than 0.5 and the LTR is less than 0.6, the MPC lateral stability controller is set to be operated.
4.1. Design of the Path Tracking Controller
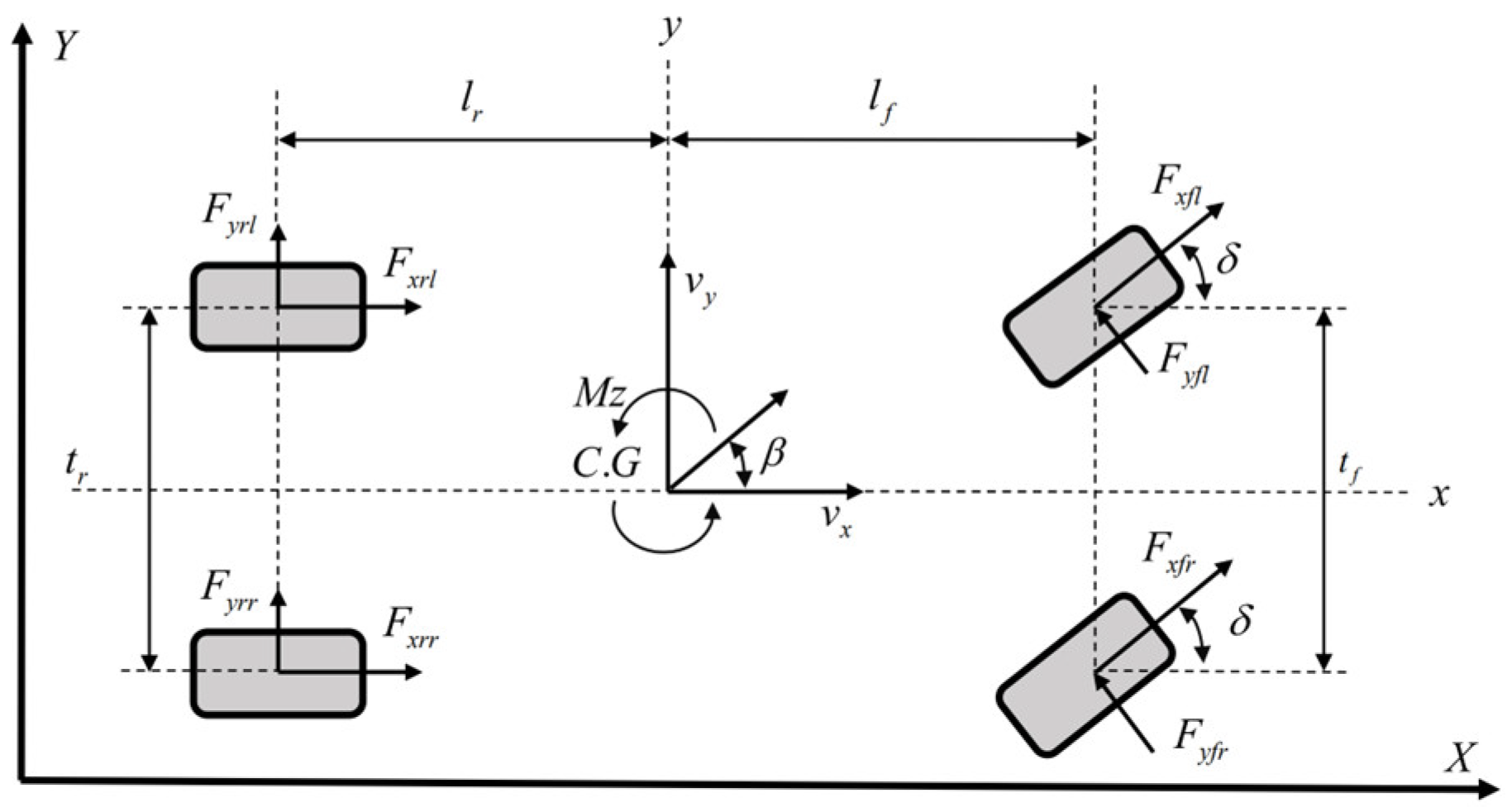
According to the established nonlinear dynamic Equations (1)–(4), a nonlinear state equation can be constructed as follows:
where
is the state parameter and
is the control variable. The specific parameters are as follows:
A nonlinear MPC path tracking controller can be designed using the nonlinear state equation. Although the control precision can be improved, the nonlinear control method requires a large amount of calculation and may be unable to meet the real-time requirements of the vehicle path tracking under different working conditions. As such, the advantages of the simple calculations and good real-time performance of a linear control method should be considered. Therefore, in view of the above problems, we linearize the nonlinear state equation and use the linearization control method to design the path tracking controller.
Equation (25) can be linearized by using a Taylor expansion at the selecting point
. The linearized expression is described as follows.
Equation (26) is a continuous equation. As the MPC is a discrete-time control method, (26) can be discretized using the forward Euler method. The discrete state-space expression is written as follows:
Equation (27) can be expressed as follows:
where
I is a unit matrix of the same order as matrix
A and
T is the sampling period.
Considering that the control variable may exceed this limit, the control increments in each sampling period are constrained. Equation (28) can be converted to a new state equation containing the control variable
as follows:
where m is the dimension of the control and
n is the dimension of the state variables.
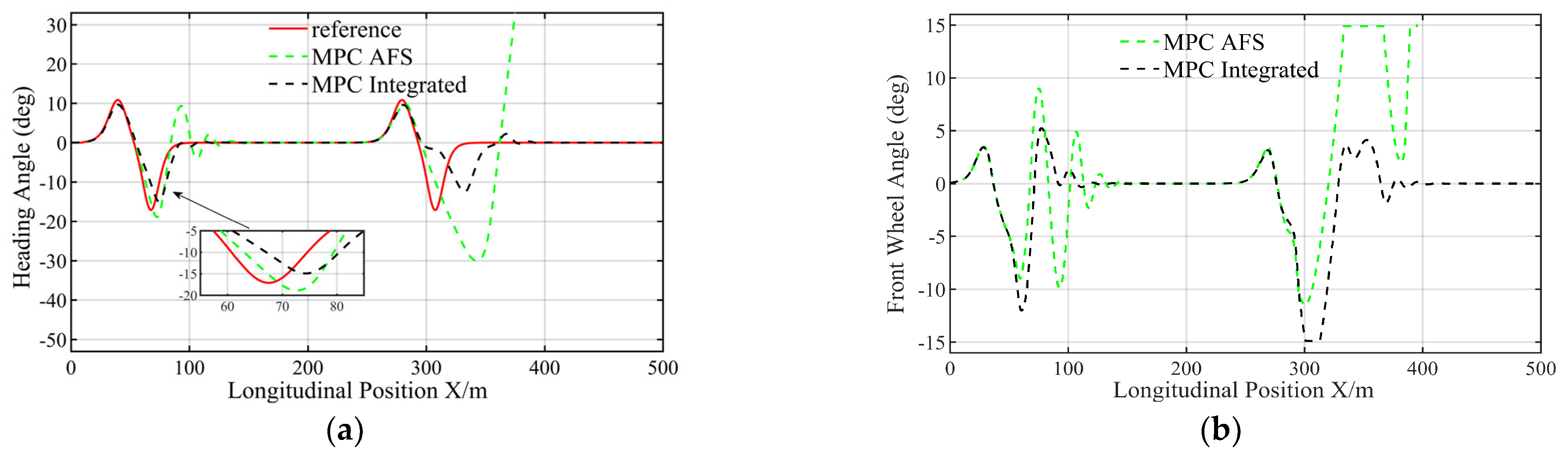
When the vehicle tracks the reference path, the vehicle path tracking accuracy and the lateral stability must be considered. Therefore, the heading angle
r and the lateral position
Y are used as the outputs of the state space, and the predicted output equation is described as follows:
The state-space expression is obtained as follows:
The predictive output equation at time
is obtained as follows:
Similarly, the predictive output equation at time
can be obtained. The derived prediction output equation can then be written in the matrix form. Finally, the prediction output expression for the discrete state is obtained as follows:
According to (34), the values of and the lateral position in the predicted time domain can be calculated and applied to the subsequent calculations of the control algorithm.
To ensure that the FWID EV tracks the desired path smoothly and rapidly, an optimal control variable is generated by obtaining the minimum value of the defined objective function. The objective function is defined as follows:
where
and
are the prediction and control time domains, respectively,
is the output weighting matrix,
is the control weighting matrix,
is the weight coefficient, and
is a relaxation factor. The first item of the objective function reflects the fast tracking ability of the control system for the desired path. The second item reflects the requirements of the control system for the stable changes in the control variable. Considering the real-time changes in the control system, the optimal solution of the objective function in each control period cannot be guaranteed. When there is no optimal solution, the relaxation factor is added to the objective function, and the control system can replace the optimal solution with a suboptimal solution to avoid the occurrence of no solution.
Considering that an actual vehicle steering actuator has a certain scope of work, to avoid the controller producing a front wheel angle beyond the working range, it is also necessary to constrain the control variable and control increment generated by the controller. The constraints are as follows.
Moreover, the prediction output must be constrained, and the constraint is set as follows:
To facilitate the controller programming to solve for the optimal control variable, it is necessary to convert the general objective function into a quadratic programming (QP) problem.
Finally, for each sampling period, the optimization problems with constraints are solved and a control increment sequence in the
range can be obtained as follows:
As the MPC algorithm selects the first control increment
from the control increment sequence, the optimal control variable acting on the vehicle path tracking at the current moment is expressed as follows:
Similarly, the control system repeats the above steps at time k + 1, and ultimately obtains the optimal front wheel angle for tracking the expected path.
4.2. Design of the Vehicle Roll Stability Controller
Based on the MPC theory [
31] and the vehicle dynamics equations, the nonlinear state equation is established as follows:
where
is the state variable and
is the control variable. The specific parameters are as follows:
These equations are then combined in the matrix form to obtain the predictive output expression for the discrete state as follows:
The specific objective function is designed as follows:
where
In the above equation, , where is the expected additional torque generated by the controller on the four wheels. The in is the driver-input four-wheel-drive torque, and its role is to maintain a certain speed. is the last control variable solved for by the controller. and are the weight matrices. is the weight of the control increment of the roll stability controller, is the weight of the control variable of the roll stability controller, and and are the weights of the relevant relaxation factors. The objective function is divided into three functions. The first function ensures that when the controller detects a control target value greater than the set threshold, the controller generates an additional torque. The second function ensures steady changes in the control quantity and avoids large oscillations which would otherwise affect the normal operation of the vehicle. The job of the third function is to avoid a “no solution” situation of the controller.
To facilitate programming, the general objective function in (46) is converted into a standard QP form. The specific expressions are as follows:
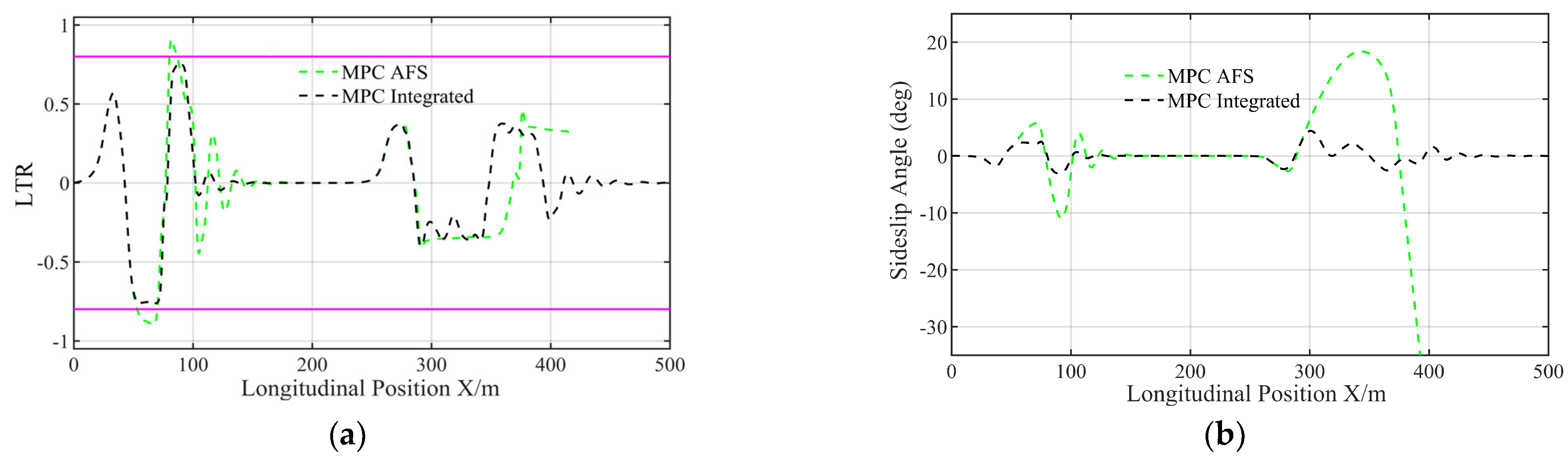
Finally, the constraint conditions are designed. To provide the roll stability for the vehicle under the conditions of high speed and sharp rotation, the approximate vertical load coefficient
of the vehicle is constrained. The constraint equation is as follows:
where
is the vertical load threshold, which is set to 0.8.
In the control process, to avoid the control amount calculated by the controller from exceeding the maximum control amount that can be generated by the motor, the control variables need to be constrained. The constraint expression for the control variables is defined as follows:
where
, and
and
are the minimum and maximum additional torque values, respectively.
The above constraint expression only imposes upper and lower bounds on the output variable and the control variables at a single time. To obtain the optimal control sequence of the objective function, it is necessary to restrict the output and the control variables of the
-time prediction model. At time
, the matrix of the constraint expression is reorganized, and expressions are obtained as follows:
4.3. Design of the Vehicle Lateral Stability Controller
In this section, the vehicle lateral stability controller is designed based on the roll stability controller. For the prediction model, the design of the objective function and the constraint conditions and the specific meaning of the parameters in each expression are similar. Therefore, this section introduces the design of the lateral stability controller.
The nonlinear state equations are established as follows:
Equation (51) is linearized to obtain the linearized state equation as follows:
In addition, (52) is discretized as follows:
The vehicle lateral velocity is selected as the output, and is expressed as follows:
The value at time
is restructured to obtain the predictive output expression of the discrete state as follows:
The objective function of the lateral stability controller is designed as follows:
The objective function in (56) can be converted into a standard QP form as
The specific meanings of each variable are consistent with those of the roll-stability controller. To provide driving stability to the vehicle on a low-attachment road, the sideslip angle of the vehicle can be expressed as follows
In this study, the roll and lateral stability controllers are designed for the same vehicle type; therefore, the constraint design for the stability controller control quantity is consistent with that for the roll stability controller.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
















