4.2. Experimental Results
Initially, the performance of the methods described throughout this paper was compared, namely, HCC, HPCC, MPC with all possible control actions (hereafter referred to as MPC49), MPC with the largest voltage vectors and the null vector (hereafter referred to as MPC13), and the proposed control HMPCC. The control methods were compared in a single test, where four control performance variables were analyzed: the total harmonic distortion (THD), the switching frequency (
), the average execution time (
), and the standard deviation of the
x-y currents (
). The THD of the six phases can be calculated as follows:
On the other hand, the standard deviation of the
x-y currents is expressed as follows:
where
is the current sample value,
is the mean current value, and
is the total number of samples.
Experimental tests were conducted in order to validate the proposed algorithm, its feasibility, and its control performance. To conduct a fair comparison, the sampling frequency was set to 20 kHz.
A first test (see
Figure 8) was used to verify the steady-state performance with a constant reference speed of 1000 r/min and an imposed load torque of 7.4 Nm. In this test, the authors compared the performance of the aforementioned controls. An initial comparison showed that the HPCC and HCC have very low execution times due to their simplicity (see
Table A1 in
Appendix A); however, HPCC shows a big improvement in regulating the asymmetrical six-phase IM, presenting less harmonic distortion (
Figure 8a,b), due to the use of the predictive mathematical model. Moreover, it can be seen that the THD decreases from 23.5% to 13.2% (see
Table A1 in
Appendix A). However, the HPCC has twice the switching frequency. On the other hand, under the same conditions, MPC49 (
Figure 8c) has optimized
α-β reference tracking and can strictly regulate the
x-y currents, which are related to the drive’s performance, due to its predictive nature, selecting the best control action from a finite set of actions. MPC49 has a similar switching frequency to HPCC, due to the use of all magnitudes of voltage vectors from
Figure 2, which implies more switching changes. Moreover, as expected, MPC49 has a higher computational burden. Conversely, MPC13 (
Figure 8d) can reduce the computational effort from 36.7 µs to 24.5 µs (see
Table A1 in
Appendix A), since it evaluates 32 fewer control actions per sampling period; it can also reduce the switching frequency, because switching states from a large voltage vector to another large voltage vector involves fewer switches [
26] and fewer parasitic currents (
x-y) [
15], since the large voltage vector in the
α-β subspace represents the smallest vector in the
x-y subspace. In
Figure 8e, the performance of the proposed hybrid method is presented. It can be verified that the
x-y components show a significant decrement compared to the previous controls, since this method uses a different cost function that does not resort to the weighting factor, unlike MPC13 or MPC49, thereby avoiding the complex tuning process. Furthermore, this pertinent decrease in the
x-y components leads to enhanced efficiency in the machine without the requirement of sophisticated modulation schemes or additional controllers. Even though the proposed method is a combination of two distinct controls, the computational burden is similar to that of MPC13, achieving a reduction of 34% in the execution time when compared to MPC49. Moreover, the switching frequency is quite similar to that of MPC13. It is also worth mentioning that, if the HMPCC uses the standard cost function (Equation (9)), a similar performance to that of MPC13 is expected. Hereafter, only MPC49, MPC13, and the proposed HMPCC are compared, since they exhibit the most similar behavior and present the best performance.
A second test (see
Figure 9) showed the THD, switching frequency values (
), and the standard deviation of the
x-y currents (
) for a steady-state performance under different speeds with active load and without load. In almost every case, the proposed method showed less THD (see
Figure 9a) and switching frequency (see
Figure 9b), with some exceptions (see
Table A2 in
Appendix A). This is because the proposed technique has zero dependency on the weighting factor, so it can provide better values of THD in the overall test; additionally, the memory stage takes advantage of the four different null vectors and, therefore, employs the best null voltage vector that provides fewer switching changes, which is more noticeable at lower speeds (see
Table A2 in
Appendix A). It can also be noted, for higher speed with active loads, that the proposed method has an increased switching frequency, but still similar to that of MPC49. This increase in the switching frequency is quite acceptable, since the HMPCC shows the best regulation of the
x-y components for the different scenarios (see
Figure 9c).
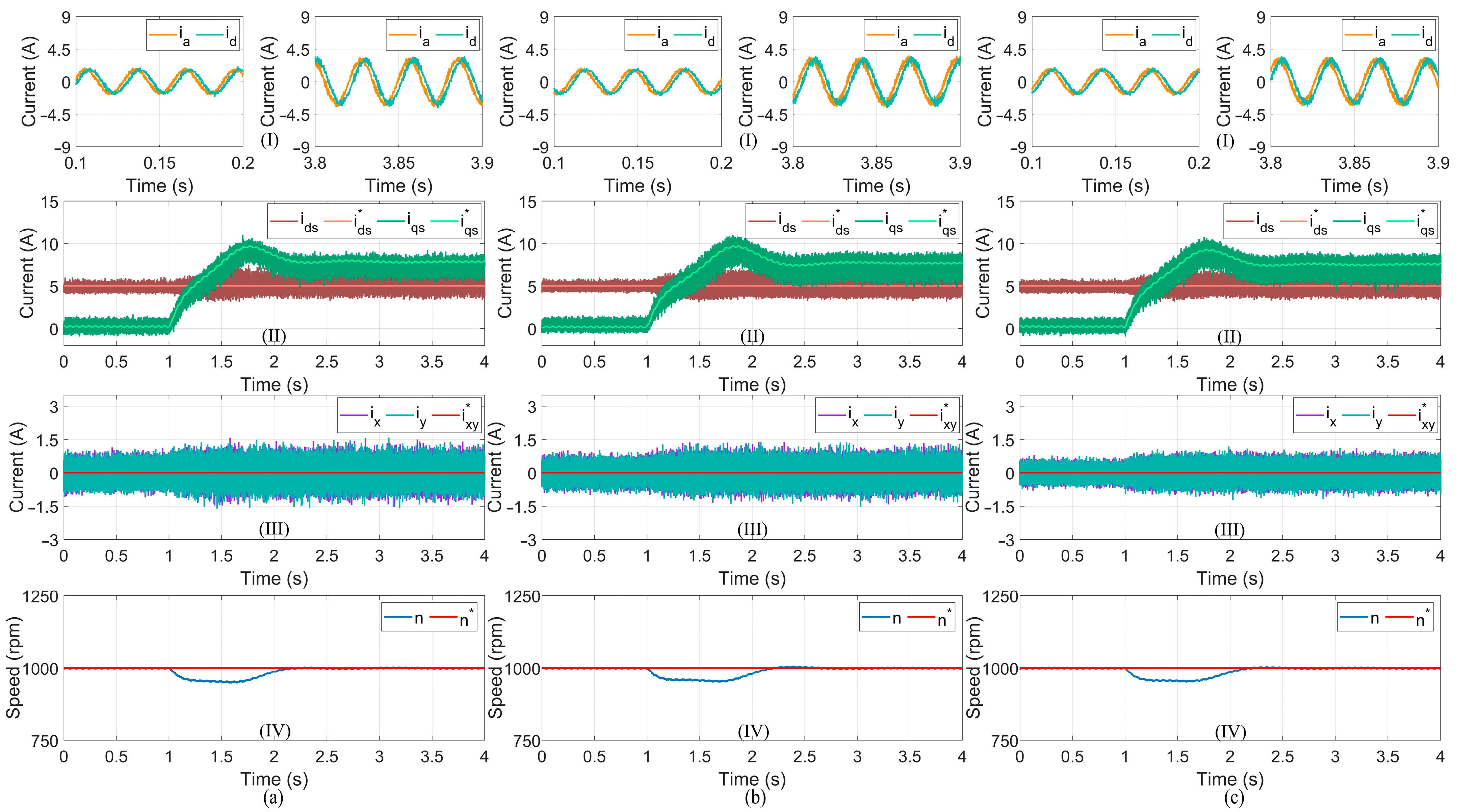
A third test (see
Figure 10) verified the transient-state response of MPC49, MPC13, and the proposed method. The motor speed was set to 1000 r/min, with a transition load torque of 1.5 Nm at t = 1 s to 7.4 Nm. MPC49, MPC13, and HMPCC showed great dynamic responses and high accuracy in tracking the rotor speed. It was observed that the MPC49 tracked the d-q reference currents better, due to the use of all control actions. However, as before, the
x-y currents were better regulated with the proposed method. This can be explained because the HMPCC uses a different cost function that does not evaluate the
α-β subspace—only the
x-y subspace (Equation (10)). This cost function cannot be used in standard MPC methods because it would choose a voltage vector that does not produce torque/flux and does not produce
x-y currents, resulting in no motion being produced. This technique can only be employed in hybrid controls (i.e., composed of two different controls) that complement one another in different ways. Since HPCC is not good enough by itself, if combined with an MPC scheme, the overall performance can be improved, resulting in a totally different control. Thus, using a cost function that only controls the
x-y components will better regulate the
x-y currents, enhancing the efficiency of the machine.
A summary of the performance indicators for the different control strategies in Test 3 is presented in
Table A3 in
Appendix A. As with the previous results, the IM currents are better regulated with the proposed method, presenting a lower THD and
(see
Table A3 in
Appendix A). The
is lower in the proposed method due to the inclusion of the memory stage. Additionally, the computational effort is also smaller with the proposed method, even though the proposed method is composed of two different methods.
The fourth test (see
Figure 11) verified the steady-state performance with a rated speed of 1500 r/min under high torque. We observed an evident deviation of the d-q currents from their reference values, since the MPC methods rely on precise parameters. This offset is more noticeable under a high load torque [
27]. Under a high-stress scenario, both MPC49 (see
Figure 11a) and MPC13 (see
Figure 11b) show a similar performance in both the d-q and
x-y components, with a similar THD, switching frequency, and standard deviation of the
x-y currents (see
Table A4 in
Appendix A), since in this scenario the most commonly used voltage vectors are the largest voltage vectors. Additionally, it can be seen that the proposed method presents more ripple in the d-q currents. Indeed, such a slight increase in the d-q currents is quite acceptable considering the significant contribution offered by the proposed HMPCC. It can be also observed that the proposed HMPCC has similar values of THD and switching frequency (see
Table A4 in
Appendix A). However, the
x-y components are better regulated (see
Figure 11c) for the aforementioned reasons, enhancing the efficiency of the drive.
To further show the advantages of HMPCC,
Table 2 establishes a comparison between FOC, DTC, MPC49, and HMPCC. It can be seen that, for the tuning parameters, DTC requires four tuning parameters, of which two are for the PI controllers and the other two are for the hysteresis controllers. FOC has five PI controllers, with which 10 parameters are calculated and tuned. On the other hand, MPC49 needs two parameters for the PI controller and one for the weighting factor in the cost function. The HMPCC requires three parameters: one for the six hysteresis controllers and two for the PI controllers. As for the internal controllers, DTC uses two hysteresis controllers, FOC uses four PI controllers, MPC49 uses a cost function to evaluate the stator current errors, and HMPCC uses six hysteresis controllers for each machine phase and two cost functions that can avoid the weighting factor parameter tuning. FOC requires a modulator to generate the switching states and, thus, has a fixed switching frequency, whereas the other three methods directly generate the switching states in their controls, not requiring a modulator. One of the major advantages of MPC49 relative to DTC and FOC is the ability to easily integrate multiple constraints into the cost function, as for DTC and FOC it is complicated to add constraints. In MPC methods (e.g., MPC49 and HMPCC), it is common to include the
x-y currents [
15] in the cost function, since in this way the harmonic distortion is well regulated, improving the overall system’s performance. In classic DTC, the main goal is to control the torque, disregarding the harmonic distortion, while in FOC the harmonic distortion is better regulated than in DTC, since it uses a modulator. However, it has much inferior performance in regulating the harmonic distortion when compared with MPC methods. Another significant feature of MPC methods (e.g., MPC49 and HMPCC) is the ability to predict the future optimal behavior of the six-phase IM, where in every control action the reference is compared with the predicted values, and the control action that presents the smallest error is employed, thereby presenting an excellent control dynamic. On the other hand, FOC presents a fast system dynamic since it directly controls the torque. As far as FOC is concerned, its dynamic is limited due to the use of a modulator that employs a null voltage vector in a transient state, thereby requiring a longer settling time [
11]. As presented in
Table 2, MPC49 presents a high computational burden, due to the fact that it evaluates 49 different switching states for each sampling time period. On the other hand, the HMPCC has the advantages of the classic MPC49, with the added advantage of a low computational cost, similar to that of DTC and FOC, without requiring weighting factor tuning in the cost function.
In summary, the proposed HMPCC overcomes the limitations of MPC49 and MPC13 in terms of better regulating the x-y components under all conditions. This enhanced performance is obtained without demanding a weight factor parameter. Additionally, this solution can be used with multiple voltage vector solutions to improve the current quality.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}










