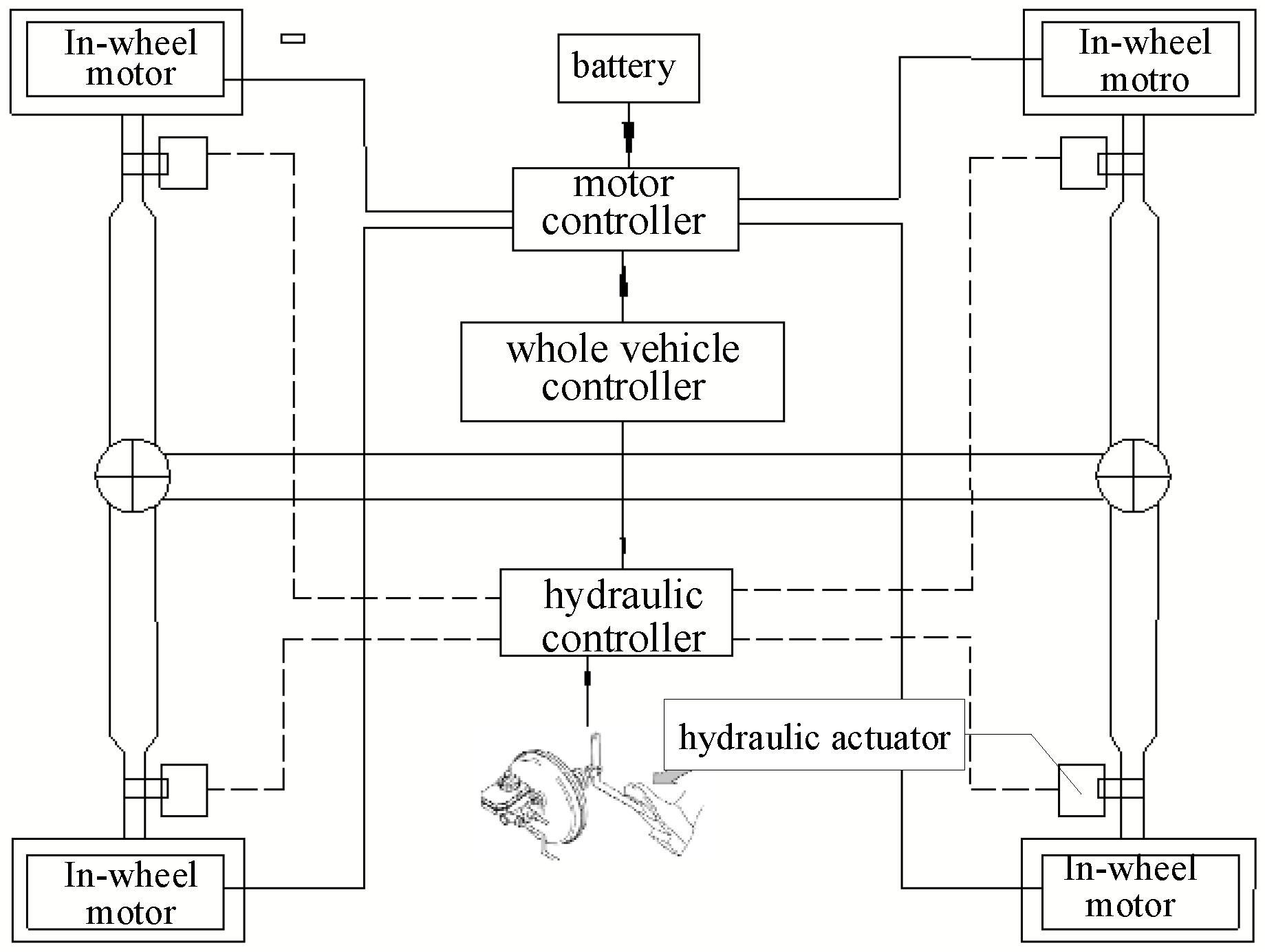
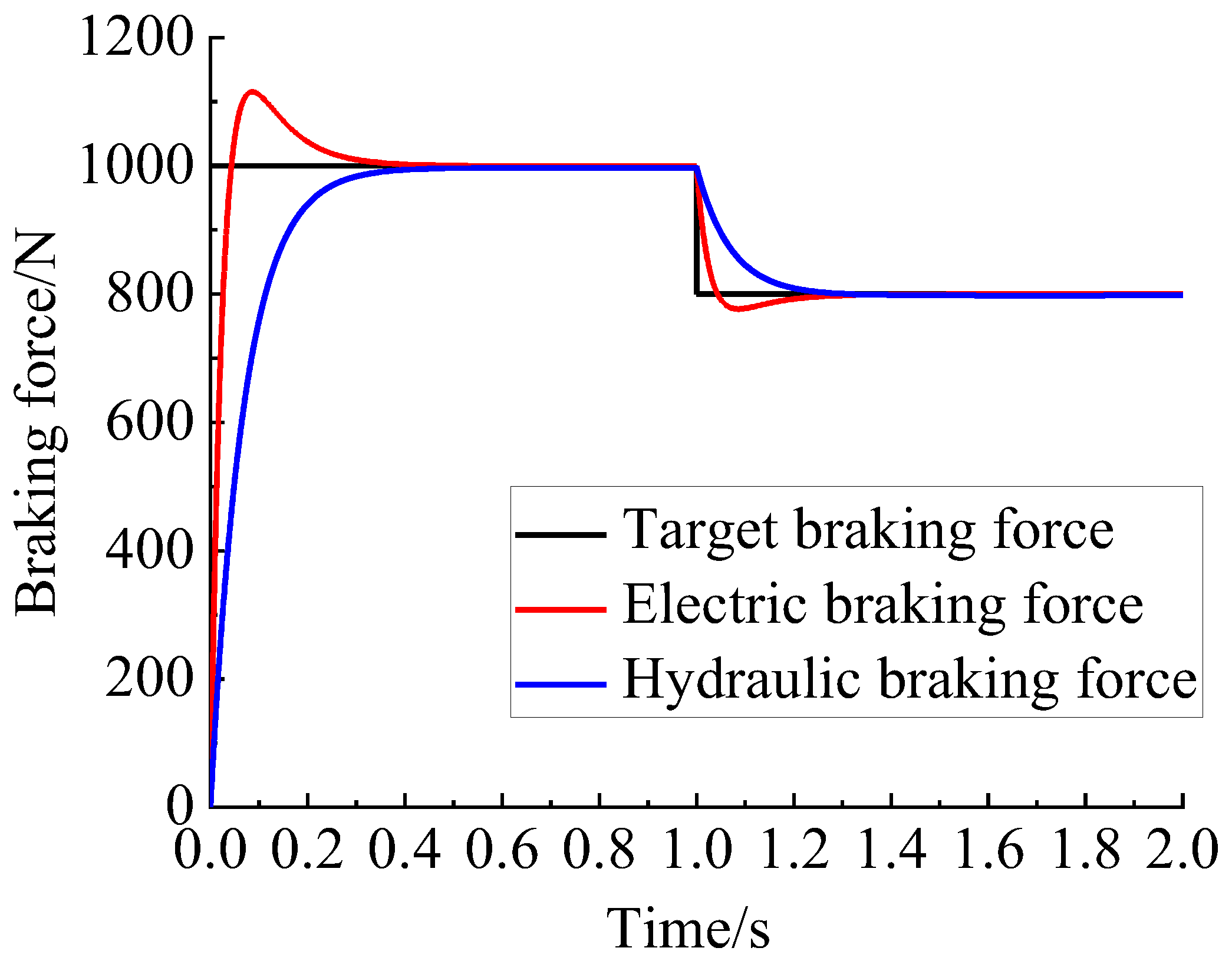
The electro-hydraulic composite braking system is mainly composed of a hydraulic braking subsystem and an electric braking subsystem. The hydraulic braking subsystem is primarily composed of a hydraulic brake controller, EHB hydraulic actuator, and sensor components. The electric braking subsystem primarily consists of an electric brake controller, motor, and sensor components. Because of its unique structure, the vehicle with an electro-hydraulic composite braking system has a variety of braking mode choices, on the one hand, to better deal with the complex and changeable braking situation. On the other hand, it can realize the recovery of braking energy and improve the driving range to ensure braking safety. However, due to the difference in response speed between electric braking and hydraulic braking, torque mutation occurs in the process of braking mode switching due to the difference in response, thus reducing the ride comfort in the braking process. Therefore, by establishing the dynamic response model of the vehicle’s electro-hydraulic composite braking, we can analyze the response process of electric braking and hydraulic braking and explore the key factors affecting the hydraulic response speed. We can also analyze the dynamic response in the process of electric braking and hydraulic braking and formulate corresponding control strategies for different systems.
3.1. Modeling of in-Wheel Motors
The permanent magnet synchronous motor with high power density and reliability is adopted. To give full play to the working characteristics of the motor, and according to the characteristic that the energy consumed by the electric braking is more incredible than the power recovered when the motor speed is lower than the minimum speed [
17], the motor model is established as follows:
where
T0 is the rated torque of the motor, and
ig and
i0 are the transmission ratio of the transmission and the main reducer. Since the hub motor directly drives the wheels, both
ig and
i0 are 1;
is the transmission system efficiency, which is taken as 100%;
R is wheel radius;
P1 is the load power of the motor;
n is motor speed;
n0 is the rated speed of the motor; and
nmin is the minimum motor speed.
The electric braking torque can be controlled by controlling the motor load power when the motor speed is lower than the rated speed, and the motor load power is calculated as follows:
where
P0 is the rated power of the motor,
Preg is motor power generation,
w is the angular speed of wheel rotation, and
is the power generation efficiency of the motor.
3.2. Modeling of the EHB
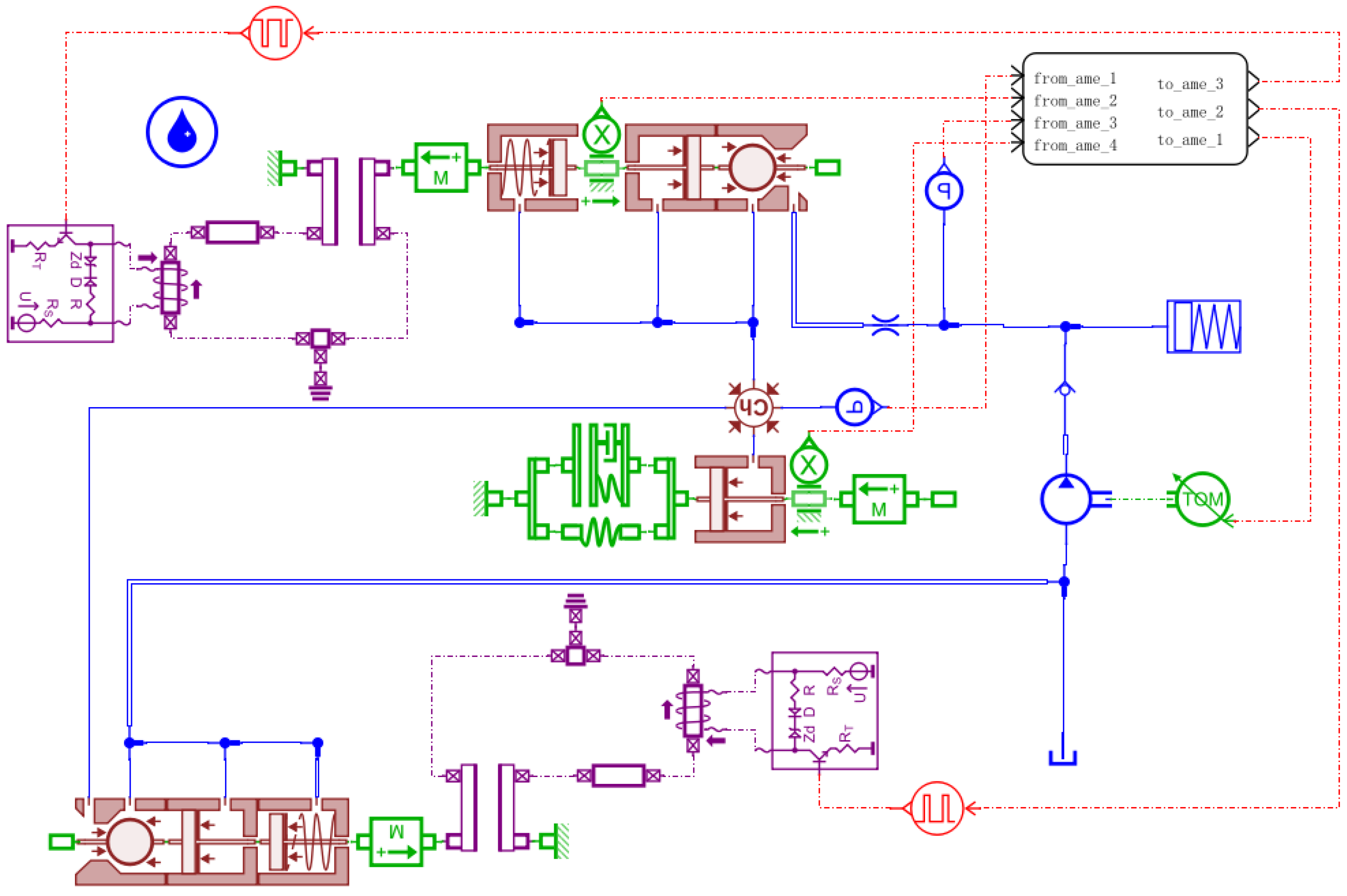
In this study, “high-pressure accumulator + hydraulic pump” type EHB with small volume and good stability was selected, and it is mainly composed of the high-pressure accumulator, motor pump, high-speed switch valve, brake wheel cylinder, and other parts. Combined with the EHB workflow, the single-wheel EHB system model is built by AMESim, its motion response is analyzed, and the motion equation of each component is deduced. This is shown in
Figure 4.
The EHB accumulator mainly uses the skin-type high-pressure accumulator, according to Boyle’s law. Its model can be expressed as follows:
where
P2,
Pmax,
Pmin, and
P are the initial charging pressure, maximum working pressure, minimum working pressure, and current working pressure of the accumulator, respectively;
V0,
V1,
V2, and
V correspond, respectively, to the volume of the gas under pressure.
When the internal pressure of the high-voltage accumulator drops to the lower limit threshold, the motor pump starts to work to raise the high-pressure accumulator pressure to the upper limit threshold, and its mathematical model can be expressed as follows:
where
Qout is the output flow of the motor pump,
Vc is oil pump displacement,
S is the motor speed,
E is the cumulative modulus of brake fluid,
pin is the pressure at the inlet end of the oil pump,
pout is the outlet pressure of oil pump, and
a is the pressure factor of the oil pump
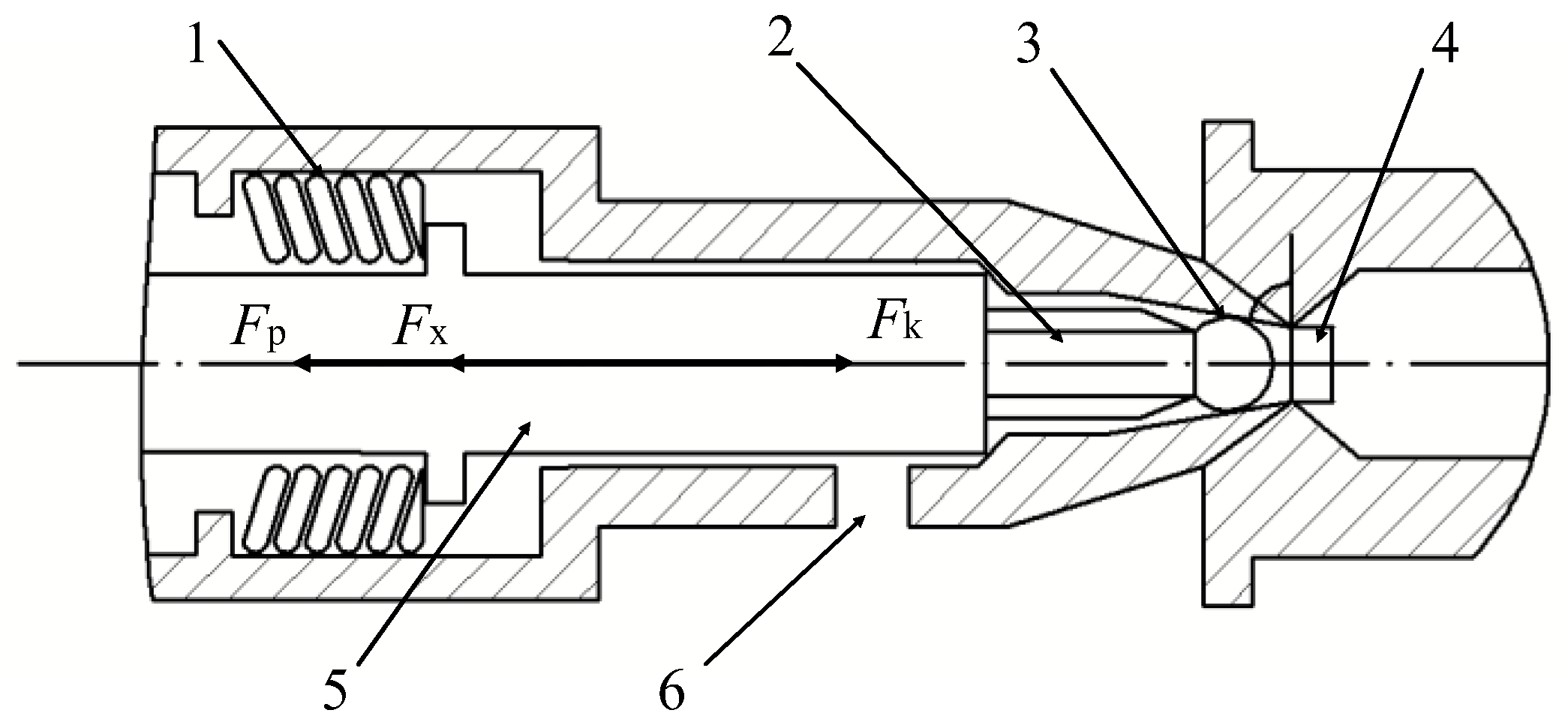
EHB brake response process is mainly composed of the high-speed on/off valve response process and brake wheel cylinder pressure to brake force conversion process. Combined with the dynamic response process of the high-speed on–off valve, analyzed the dynamic force model of the high-speed on–off valve, then explored the key factors affecting the response speed of the high-speed on–off valve. The force diagram of the high-speed on–off valve structure is shown in
Figure 5.
Based on the kinematic force model of the high-speed on–off valve in
Figure 4, the dynamic response motion equation of the high-speed on–off valve is derived as follows:
where
Fm (
x,
i) is the electromagnetic force of the solenoid valve;
Fp is the liquid pressure at the valve port;
Fk is spring force;
m is the mass of the spool;
x1 is the displacement of the spool;
v2 is the moving speed of the spool; Δ
P is the pressure difference on both sides of the inlet and outlet valve;
S1 is the working area of the ball valve at the inlet valve port;
x0 is the initial preload displacement of the solenoid valve;
K1 is the spring strength coefficient of the solenoid valve spring;
N is the number of solenoid valve coil turns;
l0 is the initial air gap size;
µ0 is the vacuum permeability, and the value is 4 × 10
−7;
A2 is the effective area of the armature; and
i is the current of the solenoid valve.
The differential equation for the high-speed on–off valve control circuit is calculated as follows [
18]:
where
U is the driving voltage of the on–off valve control circuit,
R is the equivalent internal resistance of the control circuit, and
L(x) is the inductance of the on–off valve coil and is a displacement function. The calculation formula of coil inductance is calculated as follows:
where
D is the diameter of the valve core,
lv is the armature length of the part of the valve core, and
r is the average length of the non-working clearance.
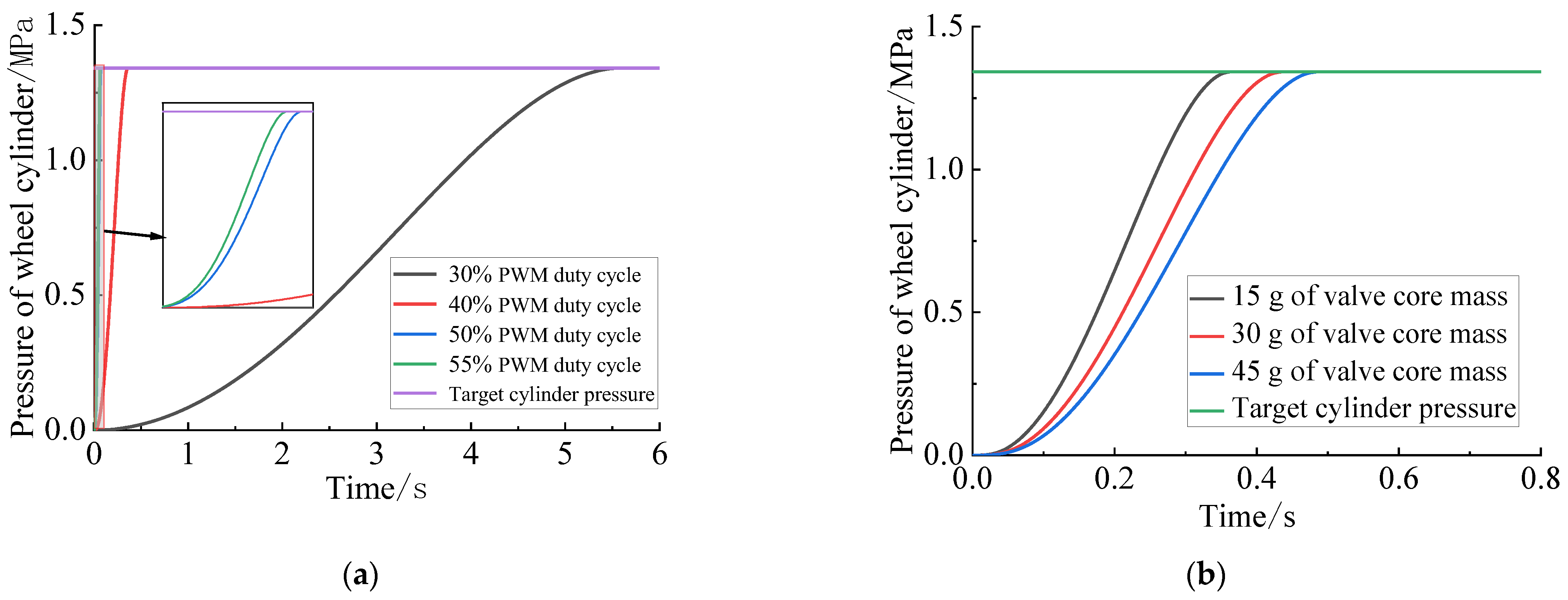
The flow characteristics of the on–off valve are affected by many factors, such as the shape of the valve port, the pressure difference between the inlet and outlet, the cross-sectional flow area of the valve port, and the viscosity and density of the brake fluid to facilitate control and verify its main influencing factors. The flow model of the on–off valve port is simplified as follows [
19,
20]:
where
Q is the valve port flow of the on–off valve,
Cq is the maximum flow coefficient of the on–off valve,
A3 is the flow area of the valve port, and
ρ is the hydraulic oil density.
Because the flow rate of the valve port is related to the shape of the valve port, to reduce the fluid resistance during the flow of brake fluid, the ball valve port with basically no flow resistance when it is fully opened is selected. According to the valve port structure in
Figure 5, the formula for calculating the cross-sectional flow area of the valve port is expressed as follows:
where
θ is the ball seat angle, with values of 60°.
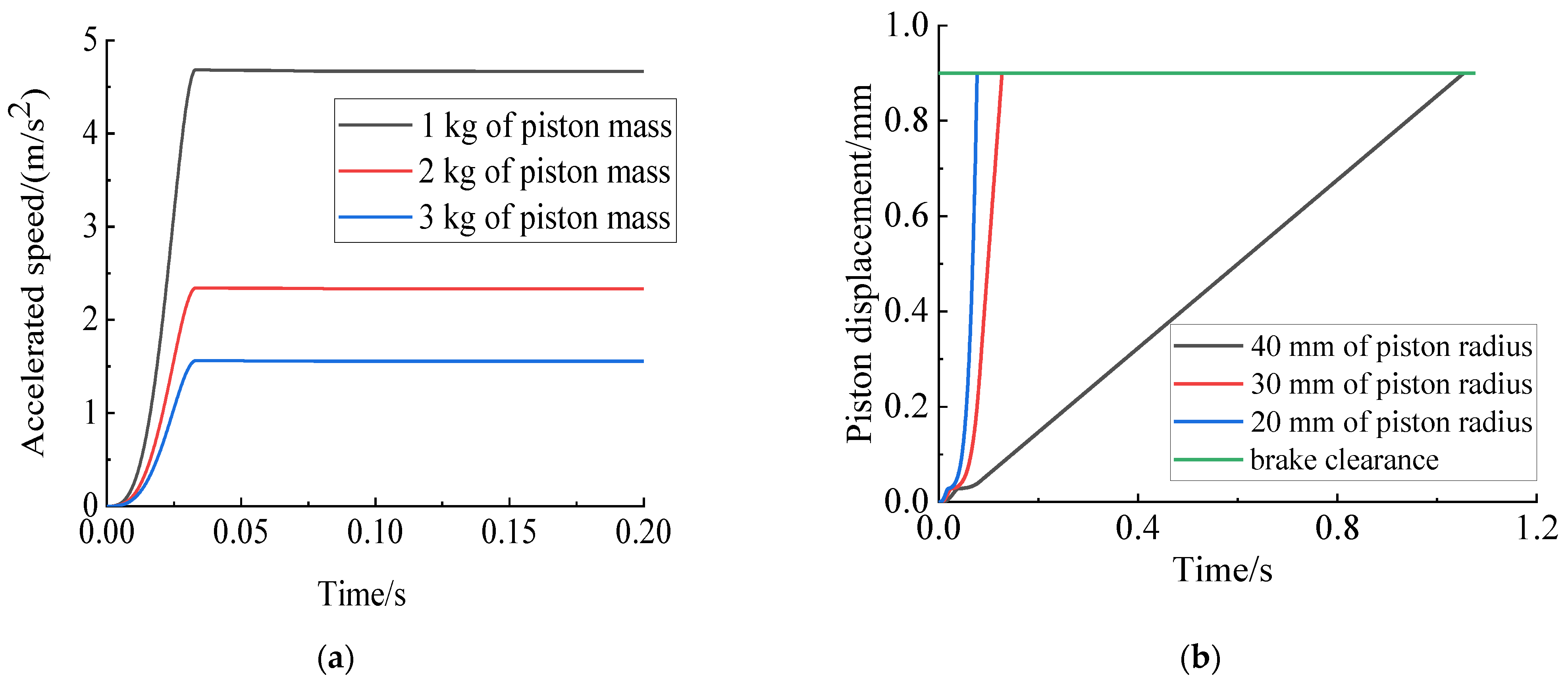
Combine the transformation process of the wheel cylinder pressure to braking force and select the caliper disc brake, for which the braking process can be simplified into an equivalent spring-damping model, to solve the model to explore the key factors affecting the transformation speed. The motion equation of the brake wheel cylinder is expressed as follows:
where
m2 is the piston mass of the wheel cylinder,
x2 is the piston stroke,
P2 is the pressure of the brake wheel cylinder,
S2 is the action area of a piston, and
K2 is the equivalent elastic coefficient.
The relationship between the hydraulic braking force of the front and rear shafts and the wheel cylinder pressure is calculated as follows:
where
FF and
FR are the hydraulic braking forces of front and rear shafts;
DF and
DR are the front and rear axle brake disc effective radius;
µF and
µR are the front and rear axle brake factor;
n is the number of friction surfaces of the brake disc; and
PR and
PF are the pressure of front and rear axle brake wheel cylinders.























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}