
Model Reference Adaptive Control-Based Autonomous Berthing of an Unmanned Surface Vehicle under Environmental Disturbance



Abstract
:1. Introduction
2. Berthing Path Planning
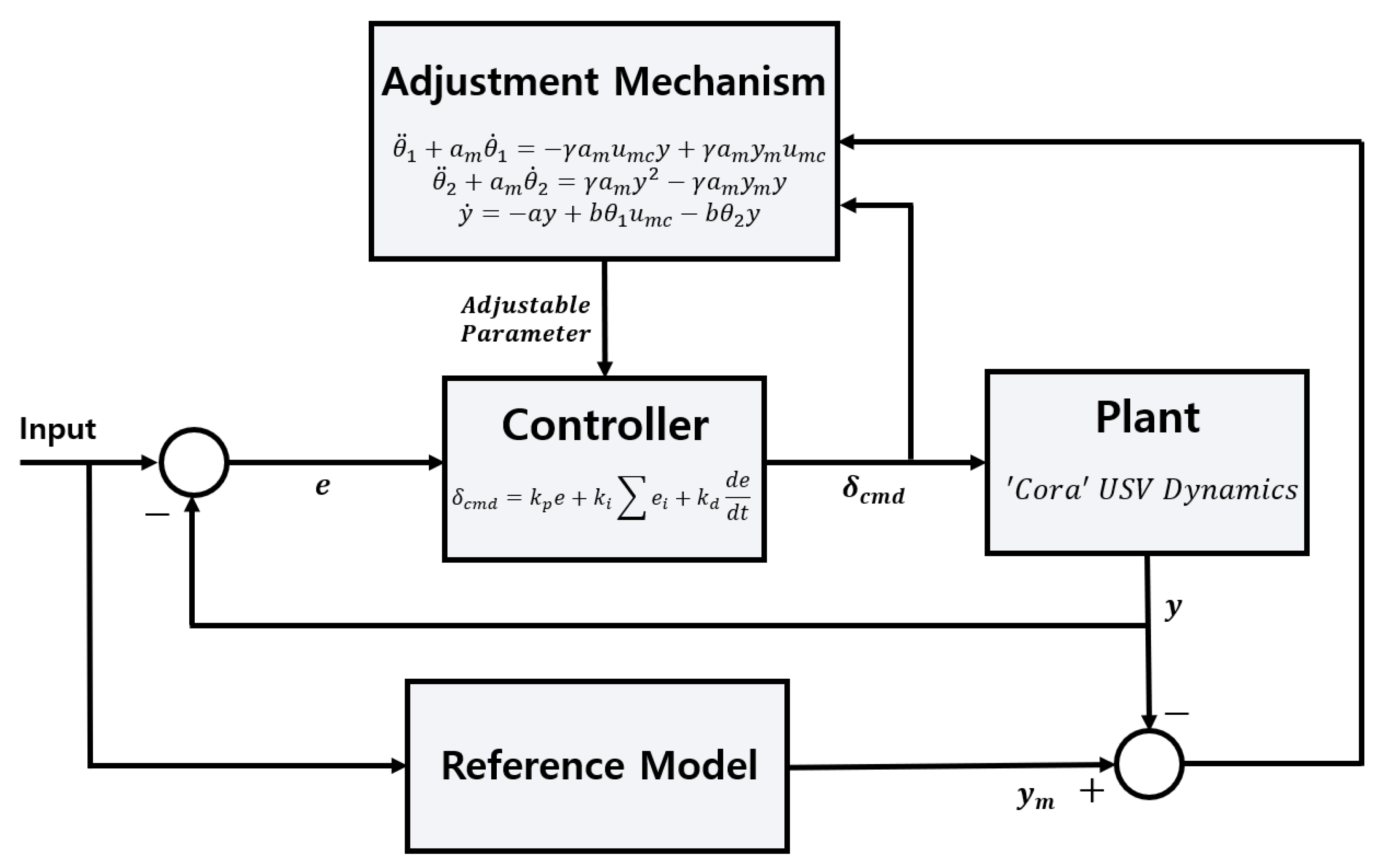
3. Control System
4. Simulation
4.1. Assumption
4.2. Simulation Environment
4.3. Berthing Simulation
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Yamato, H.; Koyama, T.; Nakagawa, T. Automatic berthing using the expert system. IFAC Proc. Vol. 1992, 25, 173–184. [Google Scholar] [CrossRef]
- Zhang, Y.; Hearn, G.E.; Sen, P. A multivariable neural controller for automatic ship berthing. IEEE Control Syst. Mag. 1997, 17, 31–45. [Google Scholar] [CrossRef]
- Im, N.K.; Nguyen, V.S. Artificial neural network controller for automatic ship berthing using head-up coordinate system. Int. J. Nav. Archit. Ocean Eng. 2018, 10, 235–249. [Google Scholar] [CrossRef]
- Nguyen, V.S.; Do, V.C.; Im, N.K. Development of automatic ship berthing system using artificial neural network and distance measurement system. Int. J. Fuzzy Log. Intell. Syst. 2018, 18, 41–49. [Google Scholar] [CrossRef] [Green Version]
- Djouani, K.; Hamam, Y. Minimum time-energy trajectory planning for automatic ship berthing. IEEE J. Ocean. Eng. 1995, 20, 4–12. [Google Scholar] [CrossRef]
- Liu, C.; Mao, Q.; Chu, X.; Xie, S. An improved A-star algorithm considering water current, traffic separation and berthing for vessel path planning. Appl. Sci. 2019, 9, 1057. [Google Scholar] [CrossRef] [Green Version]
- Park, J.Y.; Kim, N. Modeling and controller design of crabbing motion for auto-berthing. J. Ocean Eng. Technol. 2013, 27, 56–64. [Google Scholar] [CrossRef]
- Park, J.Y.; Kim, N. Design of an adaptive backstepping controller for auto-berthing a cruise ship under wind loads. Int. J. Nav. Archit. Ocean Eng. 2014, 6, 347–360. [Google Scholar] [CrossRef] [Green Version]
- Lee, S.; Hwang, Y.; Kim, Y. Crabbing simulation of ship with twin rudder and twin skeg. In Proceedings of the Annual Spring Meeting; Society of Naval Architects of Korea: Daejeon, Korea, 2000; pp. 144–147. [Google Scholar]
- Ahmed, Y.A.; Hasegawa, K. Automatic ship berthing using artificial neural network based on virtual window concept in wind condition. IFAC Proc. Vol. 2012, 45, 286–291. [Google Scholar] [CrossRef]
- Xiong, Y.; Yu, J.; Tu, Y.; Pan, L.; Zhu, Q.; Mou, J. Research on data driven adaptive berthing method and technology. Ocean Eng. 2021, 222, 108620. [Google Scholar] [CrossRef]
- Tzeng, C.; Lee, S.; Ho, Y.; Lin, W. Autopilot design for track-keeping and berthing of a small boat. In Proceedings of the 2006 IEEE International Conference on Systems, Man and Cybernetics, Taipei, Taiwan, 8–11 October 2006; Volume 1, pp. 669–674. [Google Scholar]
- Lee, S.D.; Tzeng, C.Y.; Shu, K.Y. Design and experiment of a small boat auto-berthing control system. In Proceedings of the 2012 12th International Conference on ITS Telecommunications, Taipei, Taiwan, 5–8 November 2012; pp. 397–401. [Google Scholar]
- Nelson, D.R.; Barber, D.B.; McLain, T.W.; Beard, R.W. Vector field path following for miniature air vehicles. IEEE Trans. Robot. 2007, 23, 519–529. [Google Scholar] [CrossRef] [Green Version]
- Mareels, I.M.; Anderson, B.D.; Bitmead, R.R.; Bodson, M.; Sastry, S.S. Revisiting the MIT rule for adaptive control. In Adaptive Systems in Control and Signal Processing 1986; Elsevier: Amsterdam, The Netherlands, 1987; pp. 161–166. [Google Scholar]
- Åström, K.J.; Wittenmark, B. Adaptive Control; Courier Corporation: North Chelmsford, MA, USA, 2013. [Google Scholar]
- Mareels, I.; Ydstie, B. Global stability for an MIT rule based adaptive control. In Proceedings of the 28th IEEE Conference on Decision and Control, Tampa, FL, USA, 13–15 December 1989; pp. 1585–1590. [Google Scholar]
- Vu, M.T.; Van, M.; Bui, D.H.P.; Do, Q.T.; Huynh, T.-T.; Lee, S.-D.; Choi, H.-S. Study on dynamic behavior of unmanned surface vehicle-linked unmanned underwater vehicle system for underwater exploration. Sensors 2020, 20, 1329. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bingham, B.; Agüero, C.; McCarrin, M.; Klamo, J.; Malia, J.; Allen, K.; Lum, T.; Rawson, M.; Waqar, R. Toward maritime robotic simulation in gazebo. In Proceedings of the OCEANS 2019 MTS/IEEE SEATTLE, Seattle, WA, USA, 27–31 October 2019; pp. 1–10. [Google Scholar] [CrossRef]
- Tessendorf, J. Simulating ocean water. In Simulating Nature: Realistic and Interactive Techniques; SIGGRAPH: New York, NY, USA, 2001; Volume 1, p. 5. [Google Scholar]
- Fréchot, J. Realistic simulation of ocean surface using wave spectra. In Proceedings of the First International Conference on Computer Graphics Theory and Applications (GRAPP 2006), Setúbal, Portugal, 25–28 February 2006; pp. 76–83. [Google Scholar]
- Fossen, T.I. Handbook of Marine Craft Hydrodynamics and Motion Control; John Wiley & Sons: Hoboken, NJ, USA, 2011. [Google Scholar]
- Sarda, E.I.; Qu, H.; Bertaska, I.R.; von Ellenrieder, K.D. Station-keeping control of an unmanned surface vehicle exposed to current and wind disturbances. Ocean Eng. 2016, 127, 305–324. [Google Scholar] [CrossRef] [Green Version]
- Taylor, A.; Anthony, K.; Harris, R.I.; Berrman, P.W.; Wootton, L.; Scruton, C.; Wyatt, T.; Shears, M. The Modern Design of Wind-Sensitive Structures; Construction Industry Research and Information Association: London, UK, 1971. [Google Scholar]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Information | |
|---|---|---|
| Length [m] | 12.2 | |
| USV Spec | Breadth [m] | 3.3 |
| Hullradius [m] | 2.2 | |
| Thruster | Type | Azimuth type (2ea) |
| Max Angle [degree] | ±35 | |
| Hull Type | - | Mono Hull |
| Velocity [knot] | - | 4∼5 |
| Mean Vel [m/s] | 10 | |
| Wind | Var Gain | 2 |
| Var time [s] | 1 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Baek, S.; Woo, J. Model Reference Adaptive Control-Based Autonomous Berthing of an Unmanned Surface Vehicle under Environmental Disturbance. Machines 2022, 10, 244. https://doi.org/10.3390/machines10040244
Baek S, Woo J. Model Reference Adaptive Control-Based Autonomous Berthing of an Unmanned Surface Vehicle under Environmental Disturbance. Machines. 2022; 10(4):244. https://doi.org/10.3390/machines10040244
Chicago/Turabian StyleBaek, Seungdae, and Joohyun Woo. 2022. "Model Reference Adaptive Control-Based Autonomous Berthing of an Unmanned Surface Vehicle under Environmental Disturbance" Machines 10, no. 4: 244. https://doi.org/10.3390/machines10040244